Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (3): 1058-1066.doi: 10.12305/j.issn.1001-506X.2024.03.32
• Guidance, Navigation and Control • Previous Articles Next Articles
Adaptive fault-tolerant attitude control of tailless aircraft based on event-triggered sampling
Zhilong YU1, Yinghui LI1,*, Binbin PEI1, Xiaocong DUAN2, Zhe ZHANG3
- 1. Aviation Engineering School, Air Force Engineering University, Xi'an 710038, China
2. Unit 94657 of the PLA, Jiujiang 332024, China
3. Chinese Flight Test Establishment, Xi'an 710089, China
-
Received:2023-03-08Online:2024-02-29Published:2024-03-08 -
Contact:Yinghui LI
CLC Number:
Cite this article
Zhilong YU, Yinghui LI, Binbin PEI, Xiaocong DUAN, Zhe ZHANG. Adaptive fault-tolerant attitude control of tailless aircraft based on event-triggered sampling[J]. Systems Engineering and Electronics, 2024, 46(3): 1058-1066.
share this article

Fig.1
Configuration of rudder structure of the tailless aircraft"


Fig.2
Structure of the proposed control scheme"


Fig.3
Attitude and its tracking errors of tailless aircraft with different control methods"


Fig.4
Angular velocity and its tracking errors of tailless aircraft with different control methods"


Fig.5
Each elevon deflection trajectories of tailless aircraft"

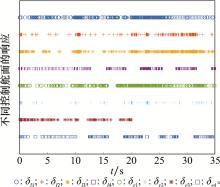
Fig.6
Time interval of triggering events for different control rudders"


Fig.7
Time response of adaptive parameters"

Table 1
Performance evaluation for three different control methods"
| 控制方法 | 姿态 | 角速度 | 采样次数 | |||
| RMSE | IAE | RMSE | IAE | |||
| ETM | 0.091 | 1.415 | 1.158 | 22.024 | 2 626 | |
| TTM | 0.088 | 1.388 | 1.107 | 21.553 | 28 000 | |
| PID | 0.161 | 4.234 3 | 2.251 | 67.644 1 | 28 000 | |
| 13 | LIU Y , JIANG B X , LU J D , et al. Event-triggered sliding mode control for attitude stabilization of a rigid spacecraft[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 50 (9): 3290- 3299. |
| 14 | ZHANG Z R , WEN C Y , XING L T , et al. Adaptive event-triggered control of uncertain nonlinear systems using intermittent output only[J]. IEEE Trans. on Automatic Control, 2021, 67 (8): 4218- 4225. |
| 15 |
ASTROM K J , BERNHARDSSON B . Comparison of periodic and event based sampling for first-order stochastic systems[J]. IFAC Proceedings Volumes, 1999, 32 (2): 5006- 5011.
doi: 10.1016/S1474-6670(17)56852-4 |
| 16 | LI Y X , HU X , CHE W , et al. Event-based adaptive fuzzy asymptotic tracking control of uncertain nonlinear systems[J]. IEEE Trans. on Fuzzy Systems, 2020, 29 (10): 3003- 0313. |
| 17 | WANG C L , GUO L , WEN C Y , et al. Event-triggered adaptive attitude tracking control for spacecraft with unknown actuator faults[J]. IEEE Trans. on Industrial Electronics, 2019, 67 (3): 2241- 2250. |
| 18 |
SHI Y , SHAO X L . Neural adaptive appointed-time control for flexible air-breathing hypersonic vehicles: an event-triggered case[J]. Neural Computing and Applications, 2021, 33, 9545- 9563.
doi: 10.1007/s00521-021-05710-7 |
| 19 |
ZHANG C L , GUO G . Extended prescribed performance fault-tolerant control of autonomous surface vessels using event-triggered inputs[J]. Nonlinear Dynamics, 2023, 111, 1315- 1327.
doi: 10.1007/s11071-022-07881-x |
| 20 |
YU Z L , LI Y H , LYU M L , et al. Modeling and composite adaptive neural fault-tolerant tracking control for tailless aircraft[J]. Nonlinear Dynamics, 2023, 111 (20): 19111- 19131.
doi: 10.1007/s11071-023-08849-1 |
| 21 |
LU P , VAN K E J , DE V C . Aircraft fault-tolerant trajectory control using incremental nonlinear dynamic inversion[J]. Control Engineering Practice, 2016, 57, 126- 141.
doi: 10.1016/j.conengprac.2016.09.010 |
| 22 |
YU Z L , LI Y H , LV M L , et al. Predefined-time fault-tole-rant attitude control for tailless aircraft considering actuator input saturation[J]. Aerospace Science and Technology, 2023, 140, 108472.
doi: 10.1016/j.ast.2023.108472 |
| 23 |
YU Y , WANG H L , LI N . Fault-tolerant control for over-actuated hypersonic reentry vehicle subject to multiple distur-bances and actuator faults[J]. Aerospace Science and Technology, 2019, 87, 230- 243.
doi: 10.1016/j.ast.2019.02.024 |
| 24 |
WANG W , WEN C L . Adaptive compensation for infinite number of actuator failures or faults[J]. Automatica, 2011, 47 (10): 2197- 2210.
doi: 10.1016/j.automatica.2011.08.022 |
| 25 |
WANG W , WEN C L . Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance[J]. Automatica, 2010, 46 (12): 2082- 2091.
doi: 10.1016/j.automatica.2010.09.006 |
| 26 | SUN J L , YI J Q , PU Z Q . Fixed-time adaptive fuzzy control for uncertain nonstrict-feedback systems with time-varying constraints and input saturations[J]. IEEE Trans. on Fuzzy Systems, 2021, 30 (4): 1114- 1128. |
| 27 | LI Y X , YANG G H . Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults[J]. Automatica, 2016, 72, 177- 185. |
| 28 |
QU X B , ZHANG W G , SHI J P . A novel yaw control method for flying-wing aircraft in low speed regime[J]. Aerospace Science and Technology, 2017, 69, 636- 649.
doi: 10.1016/j.ast.2017.07.036 |
| 29 | JAHANZEB R. 无尾飞翼式飞行器的非线性控制设计与控制分配方法研究[D]. 西安: 西北工业大学, 2016. |
| 30 | JAHANZEB R. Nonlinear control design and control allocation for tailless flying wing aircraft[D]. Xi'an: Northwestern Polytechnical University, 2016. |
| 34 | JIANG W, ZHANG W, SHI J. Dynamic inversion PID based control law design for a flying wing aircraft[C]//Proc. of the IEEE Chinese Control Conference, 2019: 8014-8019. |
| 1 | 谭健. 飞翼布局无人机鲁棒滑模非线性飞行控制研究[D]. 西安: 西北工业大学, 2015. |
| TAN J. Research on robust sliding mode nonlinear flight control for fly wing UAV[D]. Xi'an: Northwestern Polytechnical University, 2015. | |
| 2 | 徐明兴. 考虑非线性影响的飞翼布局无人机多舵面分配方法研究[D]. 西安: 西北工业大学, 2014. |
| XU M X. Control allocation for flying wing unmanned aerial vehicle with nonlinear characteristics considered[D]. Xi'an: Northwestern Polytechnical University, 2014. | |
| 3 | 冯立好, 魏凌云, 董磊, 等. 飞翼布局飞机耦合运动失稳的主动流动控制[J]. 航空学报, 2022, 43 (10): 527353. |
| FENG L H , WEI L Y , DONG L , et al. Active flow control for coupled motion instability of flying-wing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (10): 527353. | |
| 4 |
ZHANG Y M , JIANG J . Bibliographical review on reconfigurable fault-tolerant control systems[J]. Annual Reviews in Control, 2008, 32 (2): 229- 252.
doi: 10.1016/j.arcontrol.2008.03.008 |
| 5 |
SHTESSEL Y , BUFFINGTON J , BANDA S . Tailless aircraft flight control using multiple time scale reconfigurable sliding modes[J]. IEEE Trans. on Control Systems Technology, 2002, 10 (2): 288- 296.
doi: 10.1109/87.987075 |
| 6 |
YU Z L , LI Y H , PEI B B , et al. Nonsingular fixed-time fault-tolerant attitude control for tailless flying wing aircraft with time-varying flight envelope constraints[J]. International Journal of Robust and Nonlinear Control, 2023, 33 (6): 3420- 3439.
doi: 10.1002/rnc.6570 |
| 7 |
ZHANG S J , HUANG C Y , JI K , et al. Prescribed performance incremental adaptive optimal fault-tolerant control for nonlinear systems with actuator faults[J]. ISA Transactions, 2022, 120, 99- 109.
doi: 10.1016/j.isatra.2021.03.011 |
| 8 |
YU Z L , LI Y H , LV M L , et al. Predefined-time anti-saturation fault-tolerant attitude control for tailless aircraft with gua-ranteed output constraints[J]. Nonlinear Dynamics, 2023, 111, 1399- 1416.
doi: 10.1007/s11071-022-07904-7 |
| 9 |
XING L T , WEN C Y , LIU Z T , et al. Adaptive compensation for actuator failures with event-triggered input[J]. Automatica, 2017, 85, 129- 136.
doi: 10.1016/j.automatica.2017.07.061 |
| 10 |
ZHANG C X , WANG J H , ZHANG D X , et al. Learning observer based and event-triggered control to spacecraft against actuator faults[J]. Aerospace Science and Technology, 2018, 78, 522- 530.
doi: 10.1016/j.ast.2018.05.007 |
| 11 |
WANG C L , LI Y , HU Q L , et al. Event-triggered adaptive control for attitude tracking of spacecraft[J]. Chinese Journal of Aeronautics, 2019, 32 (2): 454- 462.
doi: 10.1016/j.cja.2018.12.021 |
| 12 |
CAI D H , ZOU H G , WANG J Z , et al. Event-triggered attitude tracking for rigid spacecraft[J]. Science China Information Sciences, 2019, 62 (12): 222202.
doi: 10.1007/s11432-018-9844-3 |
| [1] | Jun YOU, Ke ZHANG, Zhiguo HAN, Tianxing CAI, Cheng ZHANG. Three-dimensional super-twisting slide mode cooperative guidance law with line-of-sight angle constraint [J]. Systems Engineering and Electronics, 2023, 45(7): 2138-2149. |
| [2] | Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG. Adaptive group formation tracking-containment control for heterogeneous unmanned swarm [J]. Systems Engineering and Electronics, 2023, 45(10): 3274-3285. |
| [3] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults [J]. Systems Engineering and Electronics, 2022, 44(4): 1220-1229. |
| [4] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| [5] | Yiming ZHANG, Jianliang AI. Positioning of aerial refueling drogue and docking control based on binocular vision [J]. Systems Engineering and Electronics, 2021, 43(10): 2940-2953. |
| [6] | Zongxing LI, Rui ZHANG. Missile adaptive attitude control based on Riccati equation [J]. Systems Engineering and Electronics, 2020, 42(6): 1358-1365. |
| [7] | TANG Weiqiang, LONG Wenkun, SUN Lijuan, HUANG Xiaoli. Multiple model adaptive control of nonlinear systems based on clustering method and neural network [J]. Systems Engineering and Electronics, 2019, 41(9): 2100-2106. |
| [8] | TAO Jiawei, ZHANG Tao. Coupled control of relative position and attitude for spacecraft proximity operations with prescribed performance [J]. Systems Engineering and Electronics, 2019, 41(5): 1103-1109. |
| [9] | LI Guiying, YU Zhigang, ZHANG Yang. Cooperative guidance law with angle constraint to intercept maneuvering target [J]. Systems Engineering and Electronics, 2019, 41(3): 626-635. |
| [10] | ZHONG Jingyang, SONG Bifeng. Position control of a tail-sitter MAV based on L1 adaptive controller in hover stage [J]. Systems Engineering and Electronics, 2018, 40(9): 2062-2070. |
| [11] | SHEN Zhipeng, WANG Ru. Adaptive sliding mode trajectory tracking control of underactuated ship based on DSC-MLP [J]. Systems Engineering and Electronics, 2018, 40(3): 643-651. |
| [12] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [13] | WEI Yang, XU Haojun, XUE Yuan. Adaptive disturbance rejection controller design for UAV three dimensional formation keeping#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2758-2765. |
| [14] | XIA Chuan, DONG Chaoyang, WANG Qing, CHENG Haoyu. Adaptive integrated guidance and control backstepping sliding mode design for blended control missile#br# [J]. Systems Engineering and Electronics, 2018, 40(10): 2325-2333. |
| [15] | SI Wenjie, DONG Xunde, ZENG Wei. Adaptive output-feedback control of an uncertain strict-feedback time-delay system [J]. Systems Engineering and Electronics, 2017, 39(6): 1325-1333. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||