Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (10): 2940-2953.doi: 10.12305/j.issn.1001-506X.2021.10.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Positioning of aerial refueling drogue and docking control based on binocular vision
Yiming ZHANG*, Jianliang AI
- Department of Aeronautics and Astronautics, Fudan University, Shanghai, 200433, China
-
Received:2020-12-29Online:2021-10-01Published:2021-11-04 -
Contact:Yiming ZHANG
CLC Number:
Cite this article
Yiming ZHANG, Jianliang AI. Positioning of aerial refueling drogue and docking control based on binocular vision[J]. Systems Engineering and Electronics, 2021, 43(10): 2940-2953.
share this article
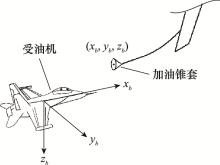
Fig.1
Body-axes of receiver aircraft"
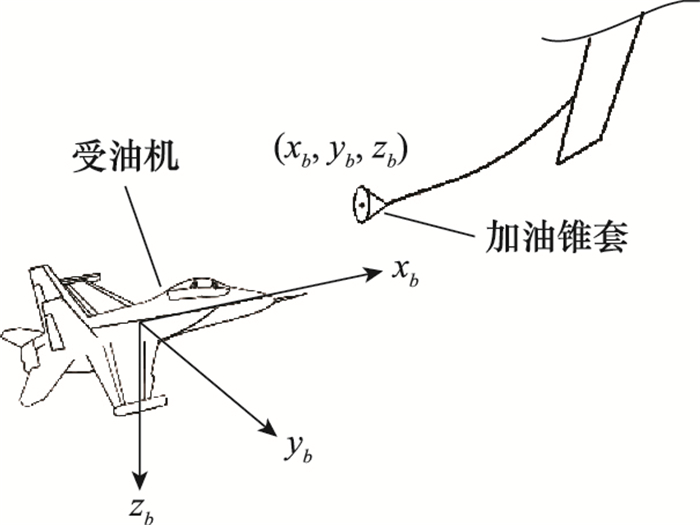
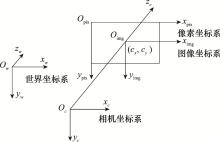
Fig.2
World, camera, image and pixel coordinates"
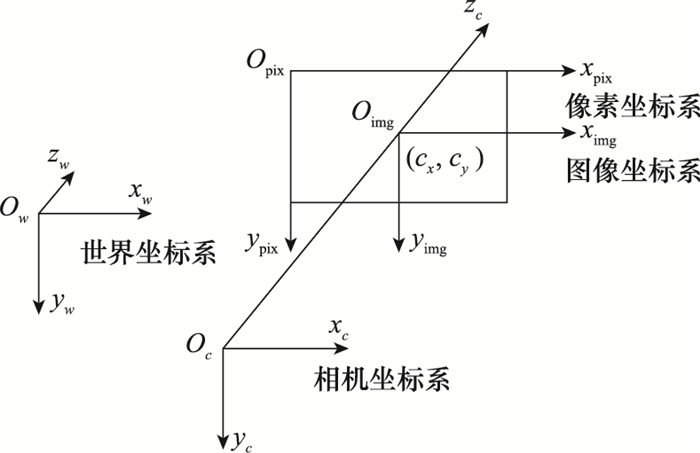
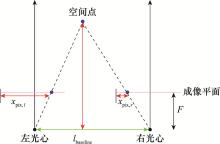
Fig.3
Distance measurement with parallel cameras"
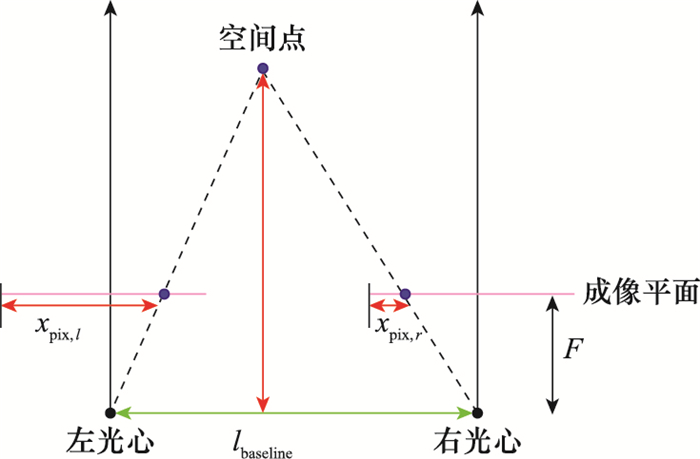

Fig.4
Structure of YOLOv4-Tiny"

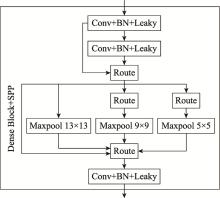
Fig.5
Insert SPP into Dense Block"
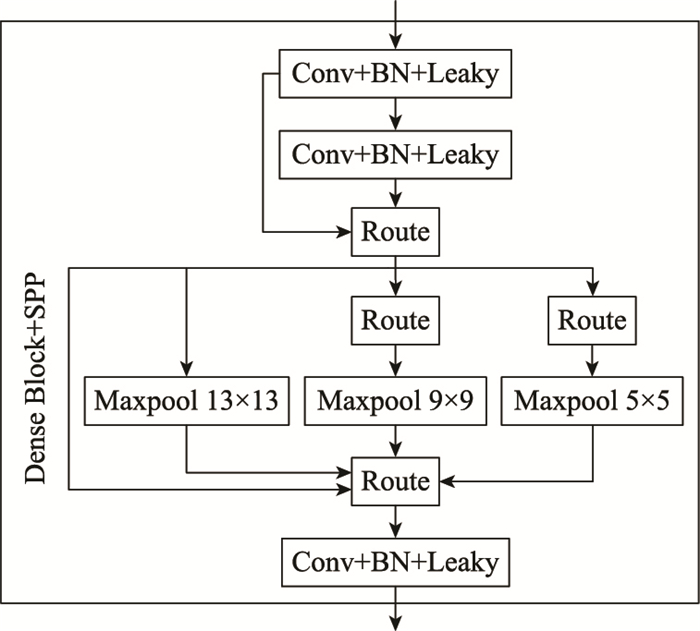
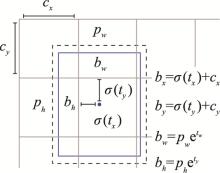
Fig.6
Prediction of Bounding-Box"
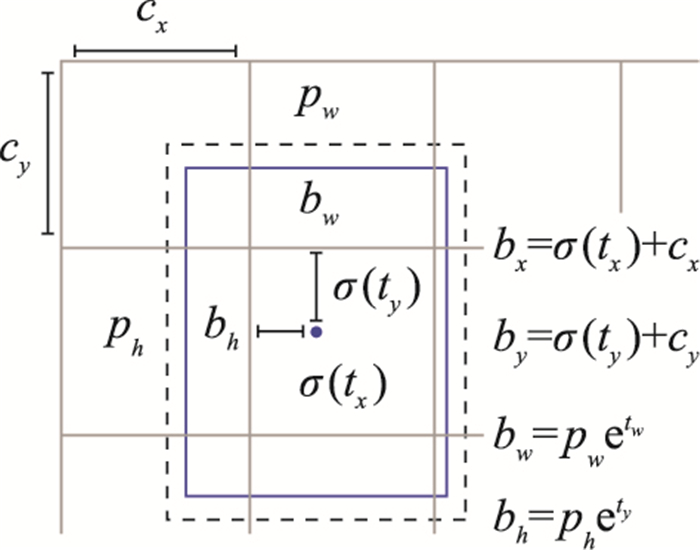
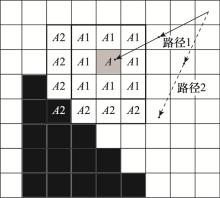
Fig.7
Method of edge detection"
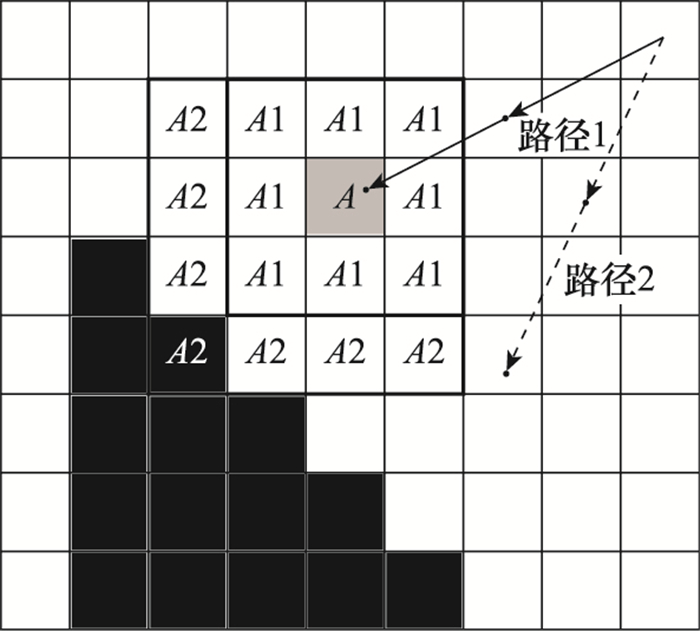

Fig.8
Scheme of drogue positioning"
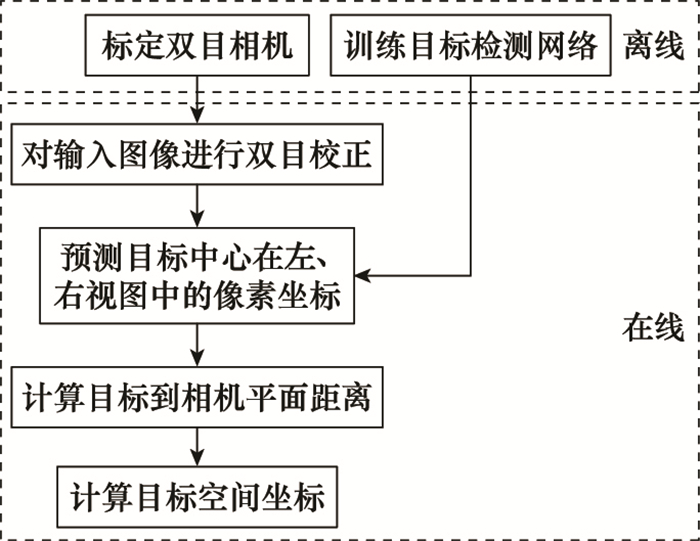
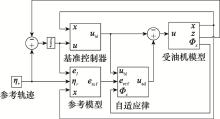
Fig.9
Diagram of docking controller system"

Table 1
Experiment environment"
| 参数 | 数值 |
| 摄像头像素尺寸/(mm/pixel) | 1.22×10-3 |
| CPU | i7-2600 |
| GPU | GTX 1070 |
| OpenCV | 3.4 |
| Cudnn | 10.1 |
Fig.10
Reprojection error"
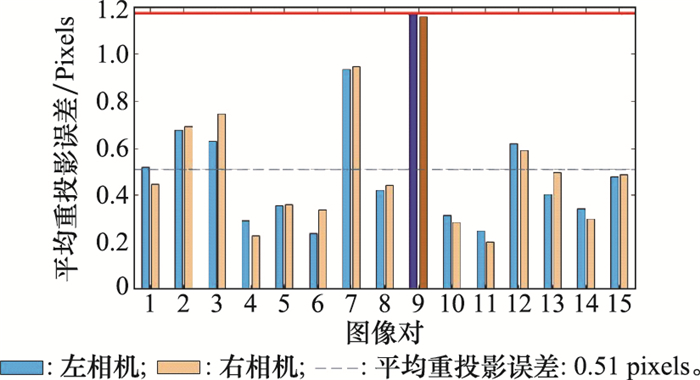
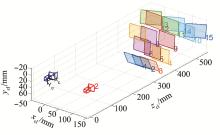
Fig.11
Location of cameras and checkboards"
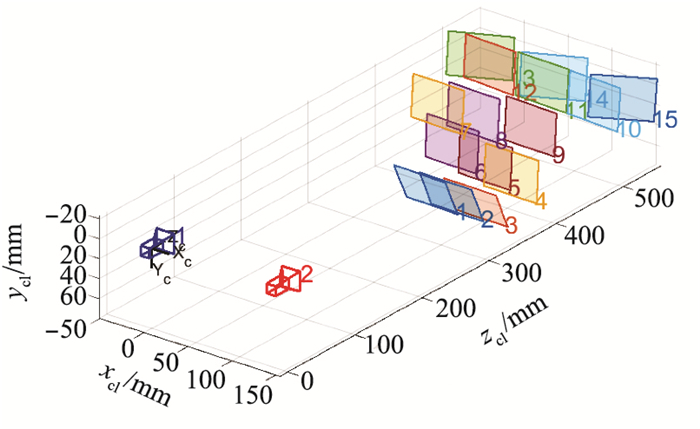
Table 2
Training parameters"
| 参数 | 数值 | 说明 |
| width, height | 416, 416 | 输入图片宽度、高度 |
| batch | 64 | 每输入batch个样本更新一次 |
| subdivisions | 32 | 将每batch分割为32组输入 |
| momentum | 0.9 | 梯度下降动量 |
| learning_rate | 0.001 | 初始学习率 |
| max_batches | 3 000 | 最大参数更新次数 |
| steps | 2 400, 2 700 | 在steps次更新后, 学习率变 为初始的scales倍 |
| scales | 0.1, 0.1 | 学习率变动因子 |

Fig.12
Examples of training set"

Table 3
Performance comparison of detectors running on test set"
| YOLO | BFLOPS | 平均IoU/% | FPS | 尺寸/MB |
| v4-TSPP | 5.893 | 88.53 | 182.01 | 16.2 |
| v4-Tiny | 8.018 | 83.54 | 200.41 | 23.3 |
| v4 | 59.563 | 96.14 | 34.21 | 244 |
| v3-Tiny | 5.448 | 48.15 | 225.63 | 33 |
| v3 | 65.29 | 58.47 | 39.25 | 234 |
Fig.13
Predictions on image sequence"
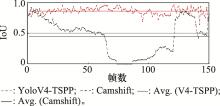
Fig.14
IoU on image sequence"
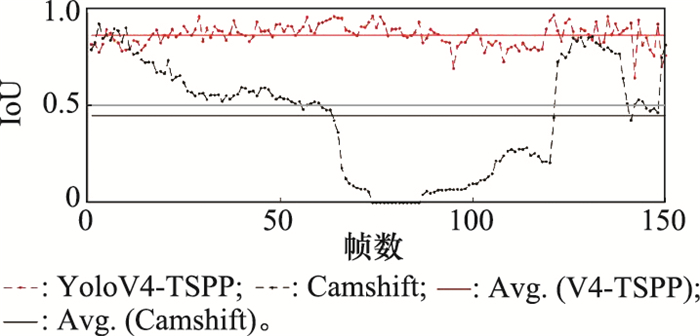

Fig.15
Test of binocular object detection (stereo rectified)"
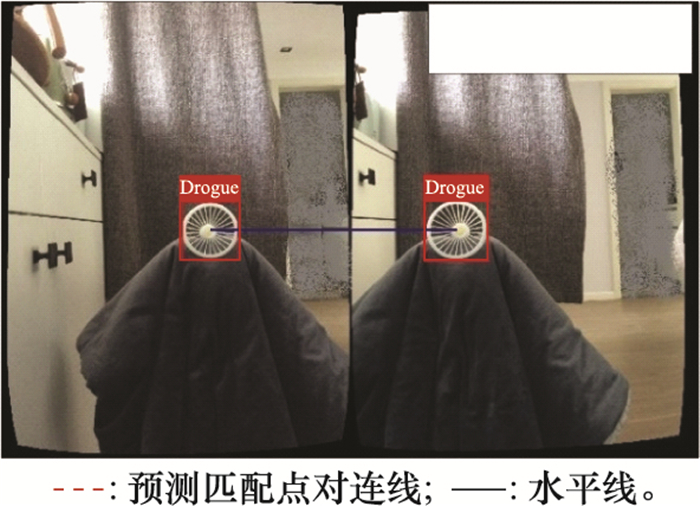
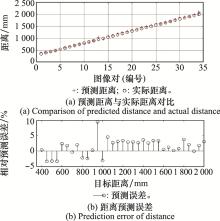
Fig.16
Result of distance prediction"
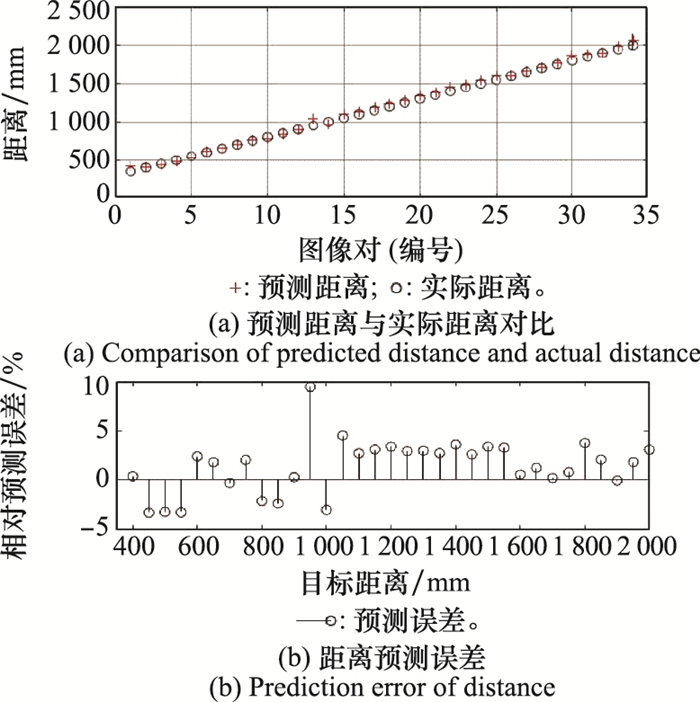
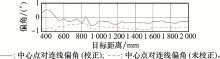
Fig.17
Deflection angle of connecting line between predicted centers over relative to horizontal line"
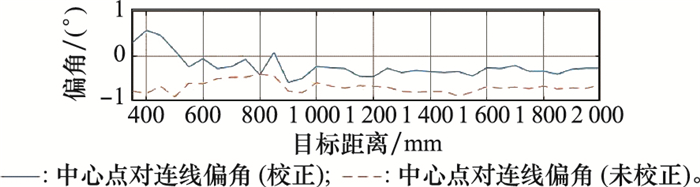

Fig.18
Location of target in world coordinates"
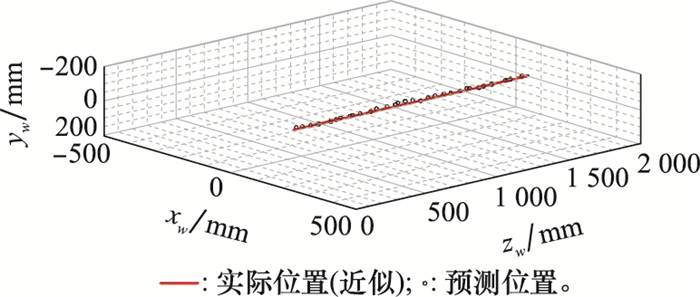

Fig.19
Performance of ellipse fitting"
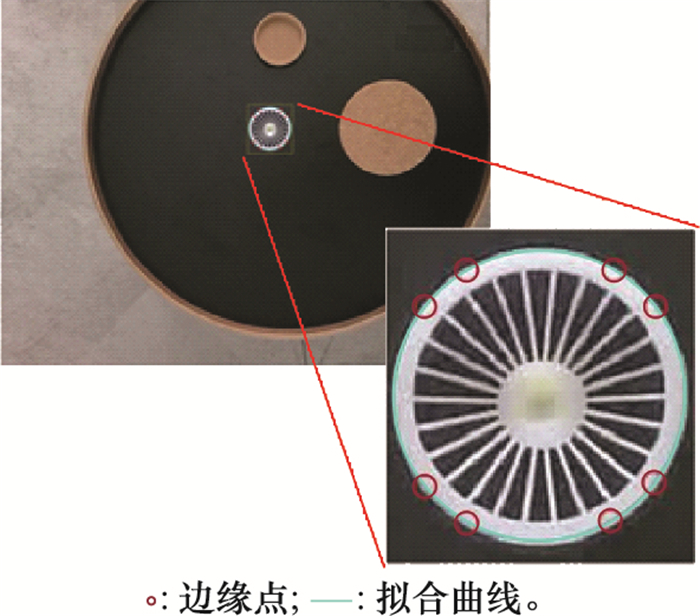

Fig.20
Wind disturbances"
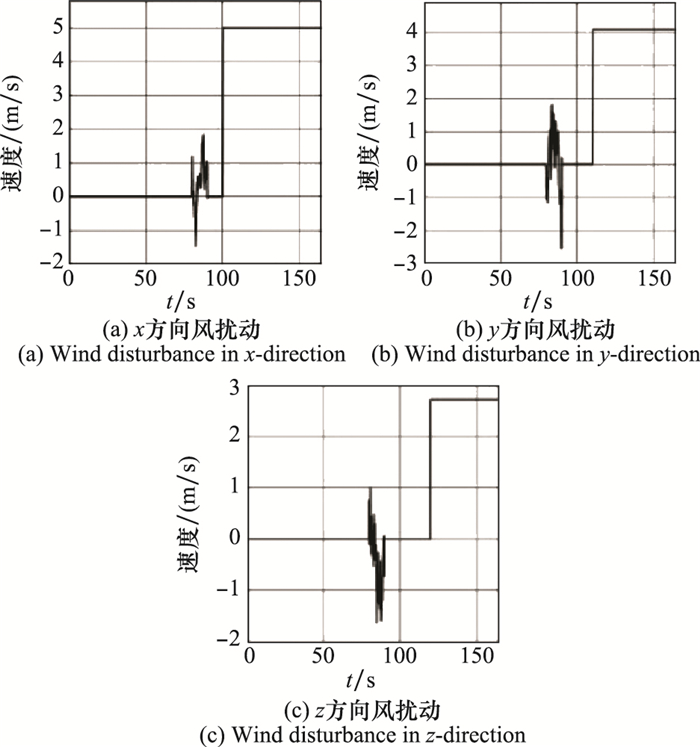

Fig.21
Command tracking in y, z direction"
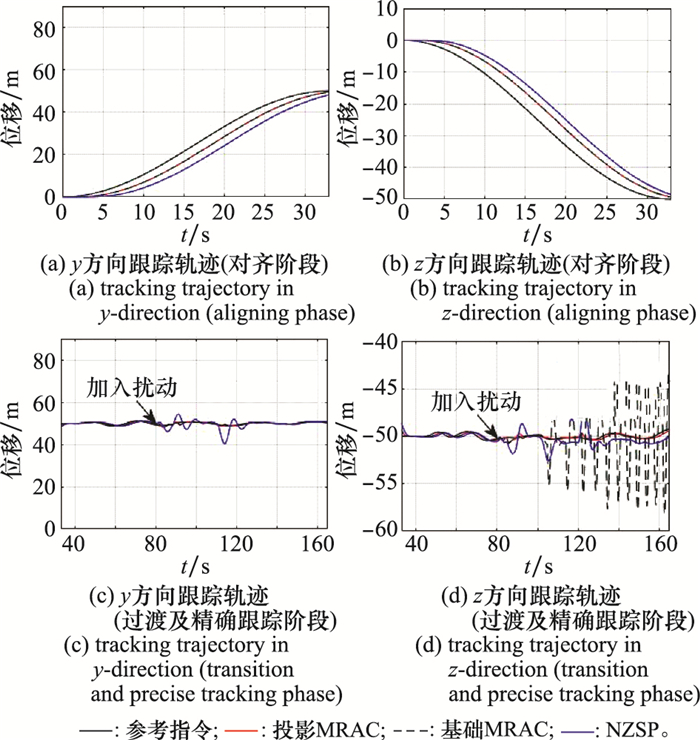
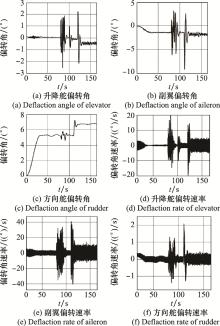
Fig.22
Deflection of control surfaces"
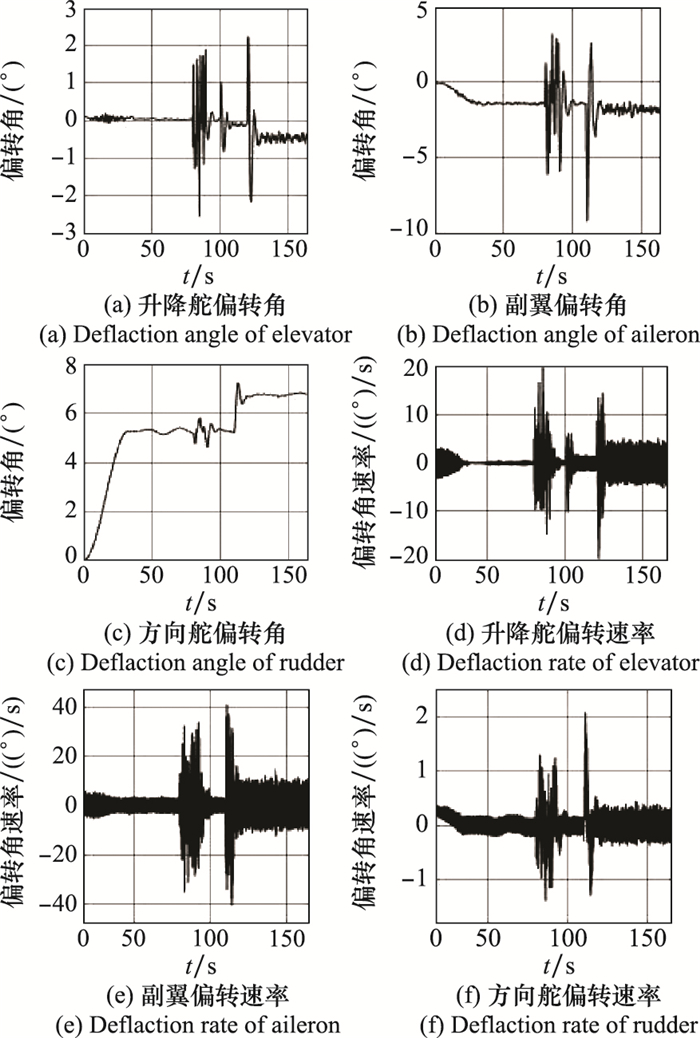

Fig.23
Tracking error in y-z plane (without turbulence)"
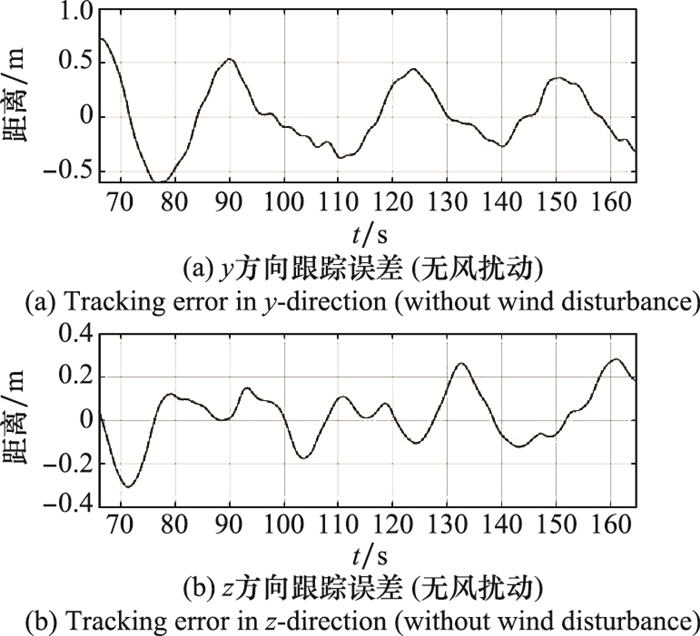
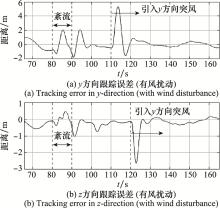
Fig.24
Tracking error in y-z plane (with turbulence)"
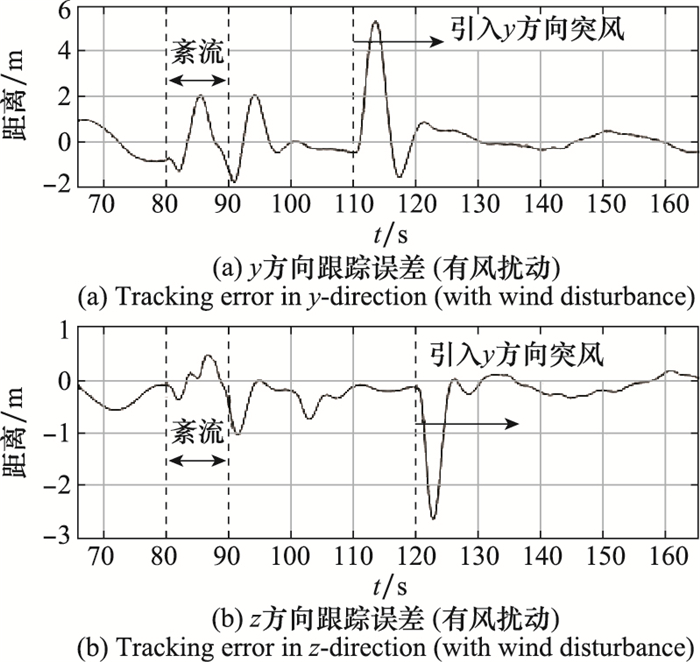
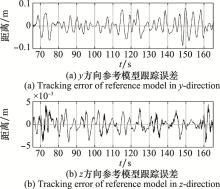
Fig.25
Error of tracking the reference model"

| 1 |
董新民, 徐跃鉴, 陈博. 自动空中加油技术研究进展与关键问题[J]. 空军工程大学学报(自然科学版), 2008, 9 (6): 1- 5.
doi: 10.3969/j.issn.1009-3516.2008.06.001 |
|
DONG X M , XU Y J , CHEN B . Progress and challenges in automatic aerial refueling[J]. Journal of Air Force Engineering University (Natural Science Edition), 2008, 9 (6): 1- 5.
doi: 10.3969/j.issn.1009-3516.2008.06.001 |
|
| 2 | 王海涛, 董新民. 空中加油动力学与控制[M]. 北京: 国防工业出版社, 2016, 4 31- 32. |
| WANG H T , DONG X M . Dynamics and control of aerial refueling[M]. Beijing: National Defense Industry Press, 2016, 4 31- 32. | |
| 3 | 全权, 魏子博, 高俊, 等. 软管式自主空中加油对接阶段中的建模与控制综述[J]. 航空学报, 2014, 35 (9): 2390- 2410. |
| QUAN Q , WEI Z B , GAO J , et al. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage[J]. Acta Aeronautica el Astronaulica Sinica, 2014, 35 (9): 2390- 2410. | |
| 4 | SRIRAM V, ATILLA D, WILLIAM B. Vortex effect modelling in aircraft formation flight[C]//Proc. of the AIAA Atmospheric Flight Mechanics Conference & Exhibit, 2003. |
| 5 |
KAMMAN R J W . Modeling and simulation of hose-paradrogue aerial refueling systems[J]. Journal of Guidance Control Dyna-mics, 2010, 33 (1): 53- 63.
doi: 10.2514/1.45482 |
| 6 | 王宏伦, 杜熠, 盖文东. 无人机自动空中加油精确对接控制[J]. 北京航空航天大学学报, 2011, 37 (7): 822- 826. |
| WANG H L , DU Y , GAI W D . Precise docking control in unmanned aircraft vehicle automated aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37 (7): 822- 826. | |
| 7 |
王旭峰, 董新民, 孔星炜, 等. 一种基于HSV色彩空间的加油锥套特征提取方法[J]. 计算机应用与软件, 2014, 31 (6): 192- 194.
doi: 10.3969/j.issn.1000-386x.2014.06.052 |
|
WANG X F , DONG X M , KONG X Y , et al. A feature extraction method of refueling drogue based on HSV color space[J]. Computer Applications and Software, 2014, 31 (6): 192- 194.
doi: 10.3969/j.issn.1000-386x.2014.06.052 |
|
| 8 | 王旭峰, 董新民, 孔星炜, 等. MS-KF融合算法用于锥套跟踪[J]. 应用光学, 2013, 34 (6): 951- 956. |
| WANG X F, DONG X M, KONG X Y, et al. MS-KF fusion algorithm for drogue tracking[J]. Journal of Applied Optics, 34(6): 951-956. | |
| 9 |
吴腾飞, 周鑫, 袁锁中. 无人机软式自主空中加油视觉导航方法[J]. 测控技术, 2015, 34 (9): 17- 20.
doi: 10.3969/j.issn.1000-8829.2015.09.005 |
|
WU T F , ZHOU X , YUAN S Z . Vision-based navigation method for UAV autonomous probe and drogue aerial refueling[J]. Measurement and Control Technology, 2015, 34 (9): 17- 20.
doi: 10.3969/j.issn.1000-8829.2015.09.005 |
|
| 10 | 黄斌, 孙永荣, 杨博文. 迭代最小二乘椭圆拟合的锥套图像检测与跟踪[J]. 中国图象图形学报, 2014, 19 (8): 1202- 1209. |
| HUANG B , SUN Y R , YANG B W , et al. Drogue image detecting and tracking based on iterative least squares ellipse fitting[J]. Journal of Image and Graphics, 2014, 19 (8): 1202- 1209. | |
| 11 | 支健辉, 孔星炜, 董新民, 等. CamShift在加油锥套识别跟踪中的应用[J]. 飞行力学, 2015, 33 (1): 83- 86, 91. |
| ZHI J H , KONG X W , DONG X M , et al. Application of camshift in drogue recognition and tracking[J]. Flight Dynamics, 2015, 33 (1): 83- 86, 91. | |
| 12 | 杨博文, 孙永荣, 黄斌, 等. 加油锥套远距图像的Hough-LS快速检测[J]. 光电工程, 2015, 42 (4): 44- 48, 55. |
| YANG B W , SUN Y R , HUANG B , et al. Hough-LS rapid detection for long-distance refueling drogue image[J]. Opto-Electronic Engineering, 2015, 42 (4): 44- 48, 55. | |
| 13 | 解洪文, 王宏伦. 基于双目视觉的自动空中加油近距导航方法[J]. 北京航空航天大学学报, 2011, 37 (2): 206- 209. |
| XIE H W , WANG H L . Binocular vision-based short-range navigation method for autonomous aerial refueling[J]. Journal of Beijing University of Aeronautics and astronautics, 2011, 37 (2): 206- 209. | |
| 14 | 段海滨, 张奇夫, 邓亦敏, 等. 基于仿鹰眼视觉的无人机自主空中加油[J]. 仪器仪表学报, 2014, 35 (7): 1450- 1458. |
| DUAN H B , ZHANG Q F , DENG Y M , et al. Biologically eagle-eye-based autonomous aerial refueling for unmanned aerial vehicles[J]. Chinese Journal of Scientific Instrument, 2014, 35 (7): 1450- 1458. | |
| 15 | 马跃博. 基于卷积神经网络的自主空中加油识别测量技术研究[D]. 北京: 中国科学院大学(中国科学院光电技术研究所), 2020. |
| MA Y B. Research on autonomous aerial refueling recognition and measurement technology based on convolutional neural network[D]. Beijing: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2020. | |
| 16 | SUN S , YIN Y , WANG X , et al. Robust landmark detection and position measurement based on monocular vision for autono-mous aerial refueling of UAVs[J]. IEEE Trans.on Cyberne-tics, 2018, 49 (12): 4167- 4179. |
| 17 |
WANG X , DONG X , KONG X , et al. Drogue detection for autonomous aerial refueling based on convolutional neural networks[J]. Chinese Journal of Aeronautics, 2017, 30 (1): 380- 390.
doi: 10.1016/j.cja.2016.12.022 |
| 18 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779-788. |
| 19 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6517-6525. |
| 20 | REDMON J, FARHADI A. Yolo v3[EB/OL]. [2020-10-20]. https://arxiv.org/abs/1804.02767. |
| 21 | ALEXEY B, WANG C, et al. YOLOv4: optimal speed and accuracy of object detection[EB/OL]. [2021-01-18] https://arxiv.org/abs/2004.10934. |
| 22 | BERTHOLD K P H. 机器视觉[M]. 王亮, 蒋欣兰, 译. 北京: 中国青年出版社, 2014: 335-364. |
| 23 | JIANG H , WANG J J , NAIRA H , et al. Verifiable adaptive flight control: unmanned combat aerial vehicle and aerial refueling[J]. Journal of Guidance Control & Dynamics, 2010, 33 (1): 75- 87. |
| 24 | TANDALE M D , BOWERS R , VALASEK J . Trajectory tracking controller for vision-based probe and drogue autonomous aerial refueling[J]. Journal of Guidance Control & Dynamics, 2006, 29 (4): 846- 857. |
| 25 | KIMMETT J, VALASEK J, JUNKINS J. Autonomous aerial refueling utilizing a vision based navigation system[C]//Proc. of the AIAA Guidance, Navigation, & Control Conference & Exhibit, 2002. |
| 26 | KIMMETT J, VALASEK J, JUNKINS J L. Vision based controller for autonomous aerial refueling[C]//Proc. of the IEEE International Conference on Control Applications, 2002, 2: 1138-1143. |
| 27 | OCHI Y, KOMINAMI T. Flight control for automatic aerial refueling via PNG and LOS angle control[C]//Proc. of the Collection of Technical Papers-AIAA Guidance, Navigation, and Control Conference, 2005: 4161-4171. |
| 28 | KHAN Z H, REHAN M. Robust formation control for aerial refueling[C]//Proc. of the IEEE International Conference on Robotics and Artificial Intelligence, 2013: 11-18. |
| 29 | 项林杰. 自主空中加油受油机精确控制与仿真[D]. 南京: 南京航空航天大学, 2015: 21-24. |
| XIANG L J. Precise control and simulation of receiver in auto-nomous aerial refueling[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015: 21-24. | |
| 30 | 李大伟, 王宏伦, 盖文东. 基于L1自适应的自动空中加油对接段飞行控制技术[J]. 控制理论与应用, 2014, 31 (6): 717- 724. |
| LI D W , WANG H L , GAI W D . L1 adaptive control for automated aerial refueling[J]. Control Theory and Applications, 2014, 31 (6): 717- 724. | |
| 31 |
SU Z K , WANG H L , LI N , et al. Exact docking flight controller for autonomous aerial refueling with back-stepping based high order sliding mode[J]. Mechanical Systems and Signal Processing, 2018, 101, 338- 360.
doi: 10.1016/j.ymssp.2017.08.036 |
| 32 | 王宏伦, 刘一恒, 苏子康. 无人机软管式自主空中加油精准对接控制[J]. 电光与控制, 2020, 27 (9): 5- 12. |
| WANG H L , LIU Y H , SU Z K . Precise docking control for UAV autonomous aerial refueling[J]. Electronics Optics & Control, 2020, 27 (9): 5- 12. | |
| 33 | BOWER S. Estimation algorithm for autonomous aerial refueling using a vision based relative navigation system[D]. Texas: A and M University, 2005. |
| 34 | ZHANG Z Y . A flexible new technique for camera calibration[J]. IEEE Trans.on Pattern Analysis & Machine Intelligence, 2000, 22 (11): 1330- 1334. |
| 35 | IOFFE S, SZEGEDY C. Batch normalization: accelerating deep network training by reducing internal covariate shift[C]//Proc. of the 32nd International Conference on International Confe-rence on Machine Learning-Volume 37July, 2015: 448-456. |
| 36 | MOREJ J . The Levenberg-marquardt algorithm: implementation and theory[J]. Lecture Notes in Mathematics, 1978, 630. |
| 37 | LIU, QI, QIN, et al. Path aggregation network for instance segmentation[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2018, 2018: 8759-8768. |
| 38 | LIN M , CHEN Q , YAN S . Network in network[J]. Computer Science, 2013, 16636683. |
| 39 |
BRADLEY D , ROTH G . Adapting thresholding using the integral image[J]. Journal of Graphics Tools, 2007, 12 (2): 13- 21.
doi: 10.1080/2151237X.2007.10129236 |
| [1] | Shuang SONG, Yue ZHANG, Linna ZHANG, Yigang CEN, Yidong LI. Lightweight target detection algorithm based on deep learning [J]. Systems Engineering and Electronics, 2022, 44(9): 2716-2725. |
| [2] | Xiao HAN, Shiwen CHEN, Meng CHEN, Jincheng YANG. Open-set recognition of LPI radar signal based on reciprocal point learning [J]. Systems Engineering and Electronics, 2022, 44(9): 2752-2759. |
| [3] | Limin ZHANG, Kaiwen TAN, Wenjun YAN, Yuyuan ZHANG. Radar emitter recognition based on multi-level jumper residual network [J]. Systems Engineering and Electronics, 2022, 44(7): 2148-2156. |
| [4] | Guodong JIN, Yuanliang XUE, Lining TAN, Jiankun XU. Advances in object tracking algorithm based on siamese network [J]. Systems Engineering and Electronics, 2022, 44(6): 1805-1822. |
| [5] | Xiaofeng ZHAO, Yebin XU, Fei WU, Jiahui NIU, Wei CAI, Zhili ZHANG. Ground infrared target detection method based on global sensing mechanism [J]. Systems Engineering and Electronics, 2022, 44(5): 1461-1467. |
| [6] | Hong ZOU, Chenyang BAI, Peng HE, Yaping CUI, Ruyan WANG, Dapeng WU. Edge service placement strategy based on distributed deep learning [J]. Systems Engineering and Electronics, 2022, 44(5): 1728-1737. |
| [7] | Dong CHEN, Yanwei JU. Ship object detection SAR images based on semantic segmentation [J]. Systems Engineering and Electronics, 2022, 44(4): 1195-1201. |
| [8] | Hongyao LI, Xiaoqiang LI, Xinzhong HAN, Xueli XIE, Jianxiang XI. Cooperative object detection and recognition algorithm for multiple UAVs based on decision fusion [J]. Systems Engineering and Electronics, 2022, 44(3): 746-754. |
| [9] | Jingming SUN, Shengkang YU, Jun SUN. Pose sensitivity analysis of HRRP recognition based on deep learning [J]. Systems Engineering and Electronics, 2022, 44(3): 802-807. |
| [10] | Yunxiang YAO, Ying CHEN. Target tracking network based on dual-modal interactive fusion under attention mechanism [J]. Systems Engineering and Electronics, 2022, 44(2): 410-419. |
| [11] | Yongxing GAO, Xudong WANG, Ling WANG, Daiyin ZHU, Jun GUO, Fanwang MENG. Weather signal detection for dual polarization weather radar based on RCNN [J]. Systems Engineering and Electronics, 2022, 44(11): 3380-3387. |
| [12] | Jiali FAN, Shaobing TIAN, Kui HUANG, Xingdong ZHU. Multi-scale object detection algorithm for aircraft carrier surface based on Faster R-CNN [J]. Systems Engineering and Electronics, 2022, 44(1): 40-46. |
| [13] | Yiheng ZHOU, Jun YANG, Saiqiang XIA, Mingjiu LYU. Estimation method of micro-motion parameters for rotor targets under flashing [J]. Systems Engineering and Electronics, 2022, 44(1): 54-63. |
| [14] | Rong FU, Tianyao HUANG, Yimin LIU. DNN based 1-bit block sparse recovery in frequency agile coherent radar [J]. Systems Engineering and Electronics, 2022, 44(1): 70-75. |
| [15] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||