Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 76-86.doi: 10.12305/j.issn.1001-506X.2026.01.08
• Sensors and Signal Processing • Previous Articles Next Articles
Small sample 3D point cloud target recognition method based on shape and skeleton feature matching
Ruijia FAN1( ), Jie LIU2, Junming YU2, Xiaofeng FENG2, Wenjing XU1, Liang YIN1,*()
), Jie LIU2, Junming YU2, Xiaofeng FENG2, Wenjing XU1, Liang YIN1,*()
- 1. School of Information and Communication Engineering,Beijing University of Posts and Telecommunications,Beijing 100876,China
2. The 27th Research Institute of China Electronics Technology GroupCorporation,Zhengzhou 450047,China
-
Received:2024-07-16Online:2026-01-25Published:2026-02-11 -
Contact:Liang YIN E-mail:Ruijia_Fan@bupt.edu.cn;YinL@bupt.edu.cn
CLC Number:
Cite this article
Ruijia FAN, Jie LIU, Junming YU, Xiaofeng FENG, Wenjing XU, Liang YIN. Small sample 3D point cloud target recognition method based on shape and skeleton feature matching[J]. Systems Engineering and Electronics, 2026, 48(1): 76-86.
share this article

Fig.1
Three-dimensional point cloud object recognition algorithm framework based on feature matching"


Fig.2
Target oriented bounding box diagram"
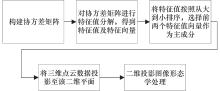
Fig.3
Three-dimensional point cloud mapping flow chart based on PCA"
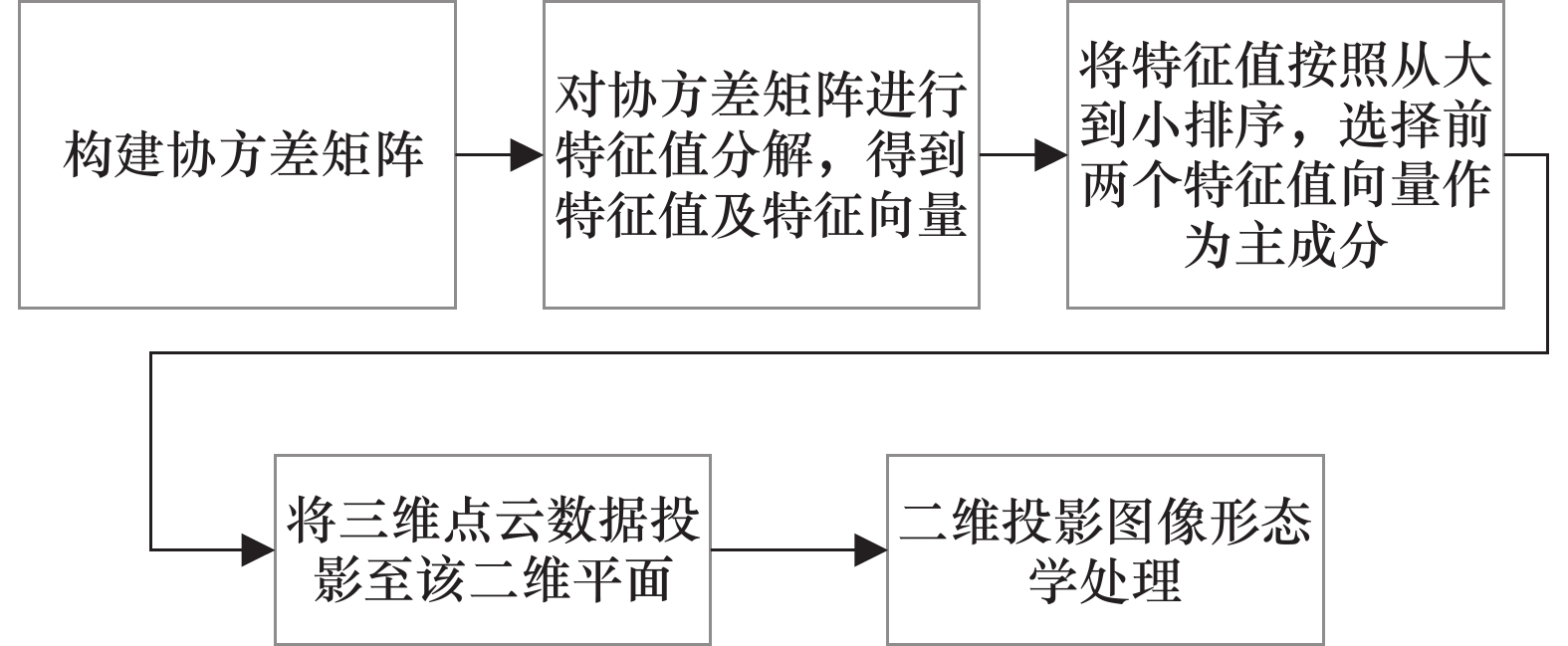

Fig.4
Flowchart of contour information extraction"
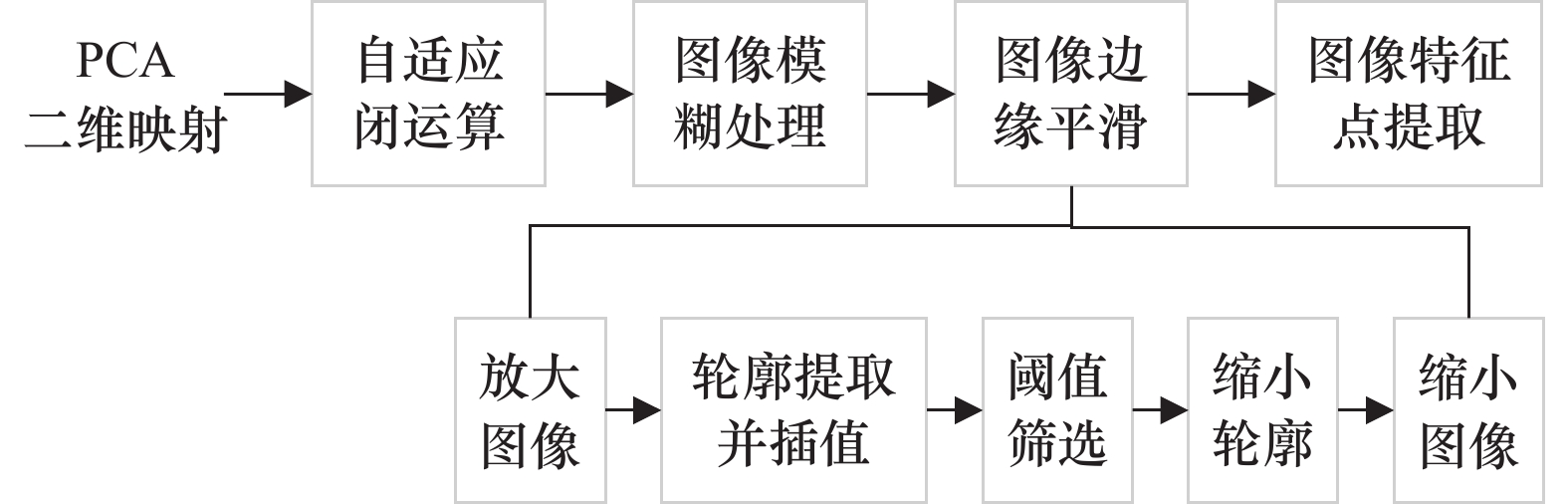
Table 1
Comparison of shape and skeleton features"
| 特征类型 | 表征能力 | 抗噪声能力 | 获取过程 |
| 形状 | 表征目标外在 轮廓,对复杂图像 细节表征能力强 | 对噪声和姿态变化 敏感性较高 | 获取困难较小, 计算量较小 |
| 骨架 | 表征目标内部拓扑 结构,在一定变化目标 观测角度下,骨架 主干连接关系 保持不变 | 对噪声和姿态变化 敏感性较低 | 获取质量受剪枝 算法影响较大,且 计算量较大 |

Fig.5
Shape and skeleton feature coding diagram based on centroid"
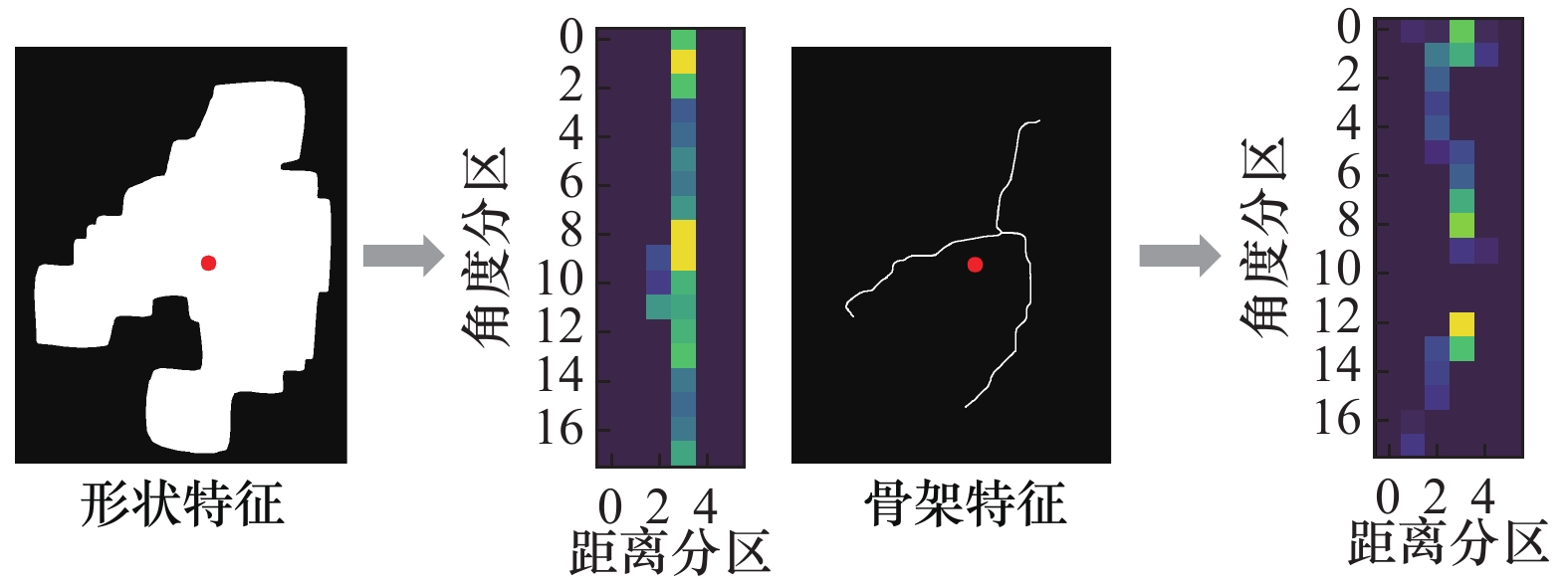

Fig.6
Original three-dimensional point cloud diagram of eight furniture models"
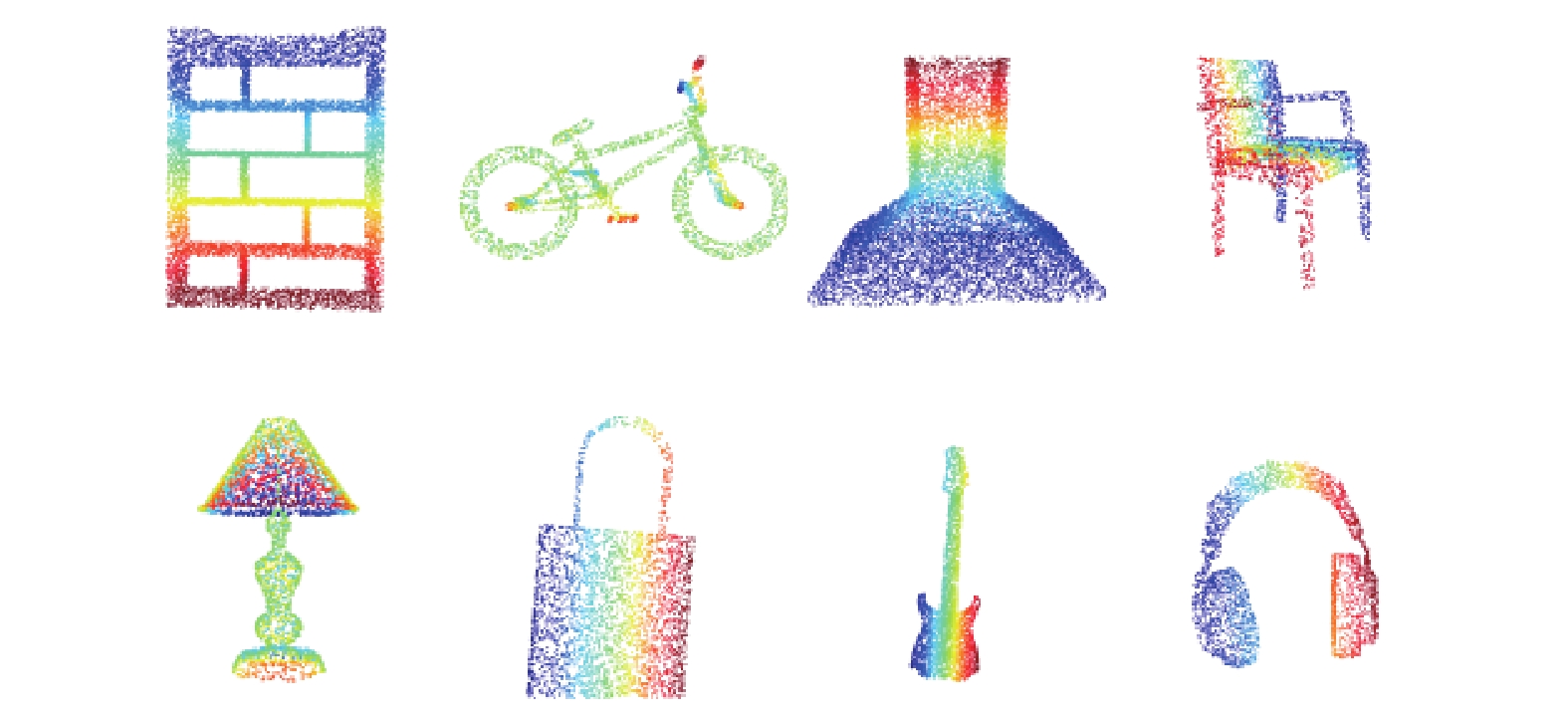

Fig.7
Schematic diagram of three-dimensional point cloud after density drop sampling"
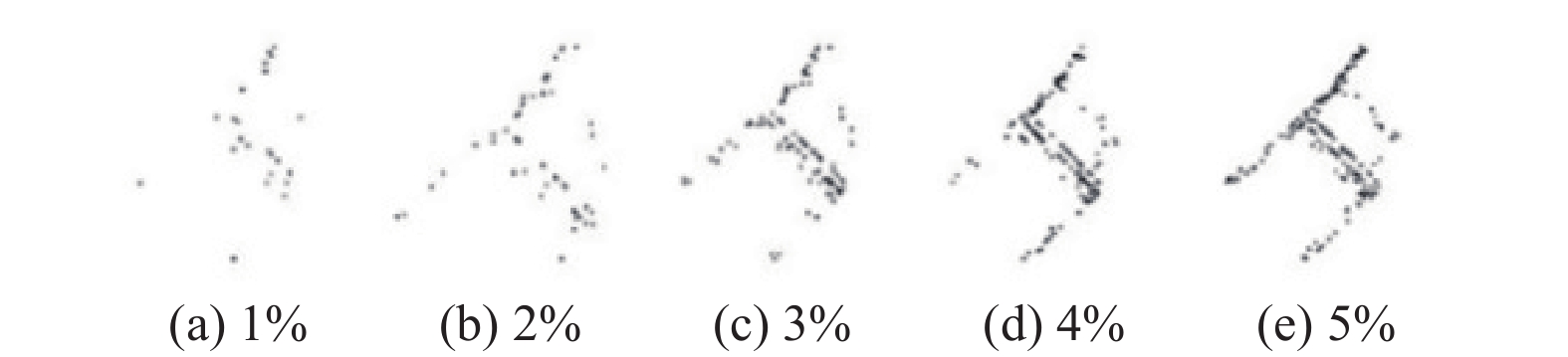

Fig.8
Schematic diagram of three-dimensional point clouds with density of 3% and signal-to-noise ratio of different positions"
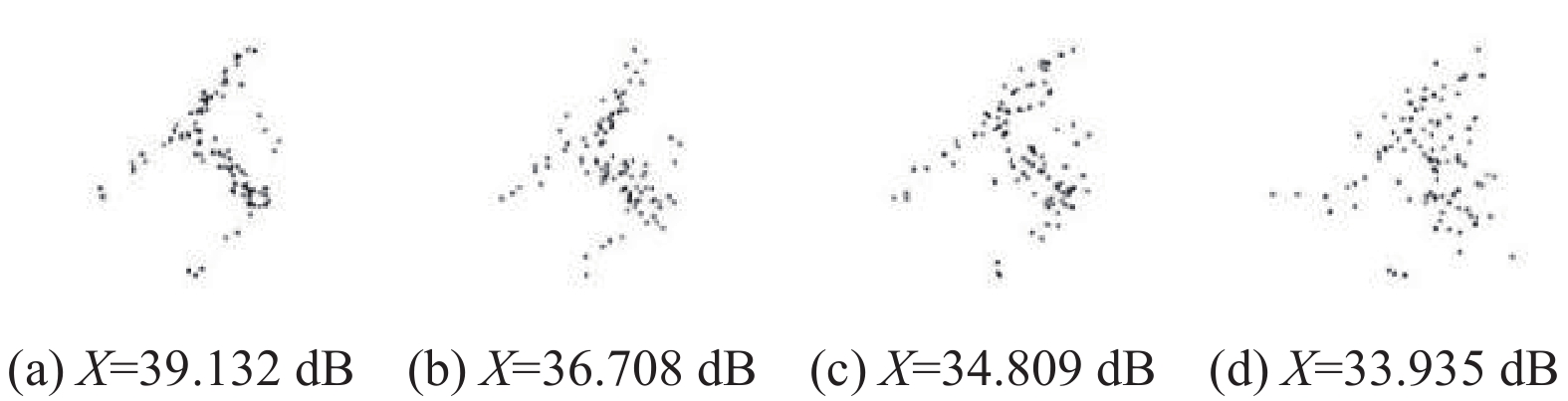

Fig.9
Two-dimensional map of the three-dimensional point cloud after rotation at different angles"
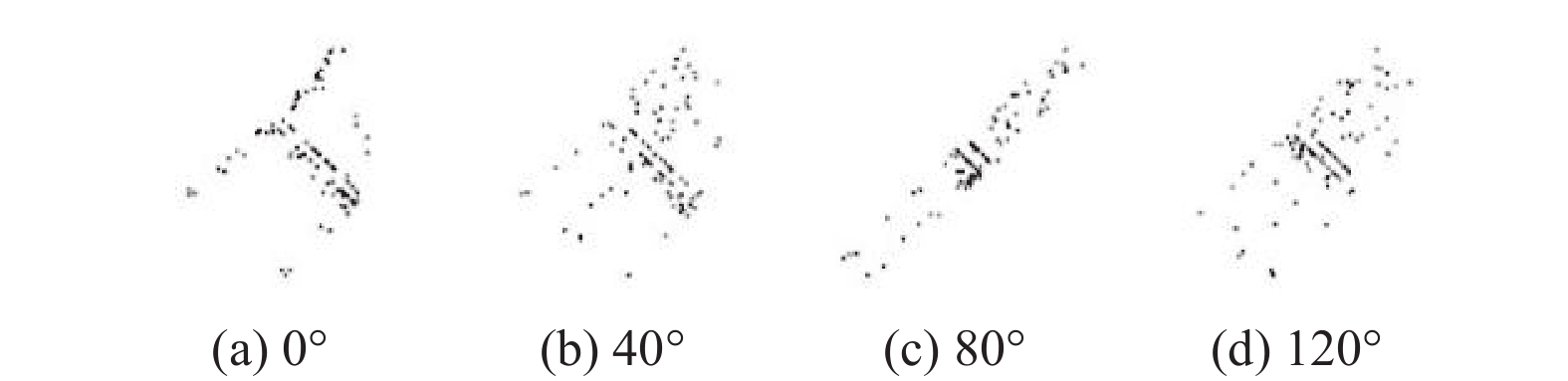
Fig.10
Shape and skeleton feature recognition accuracy comparison under different sampling points"
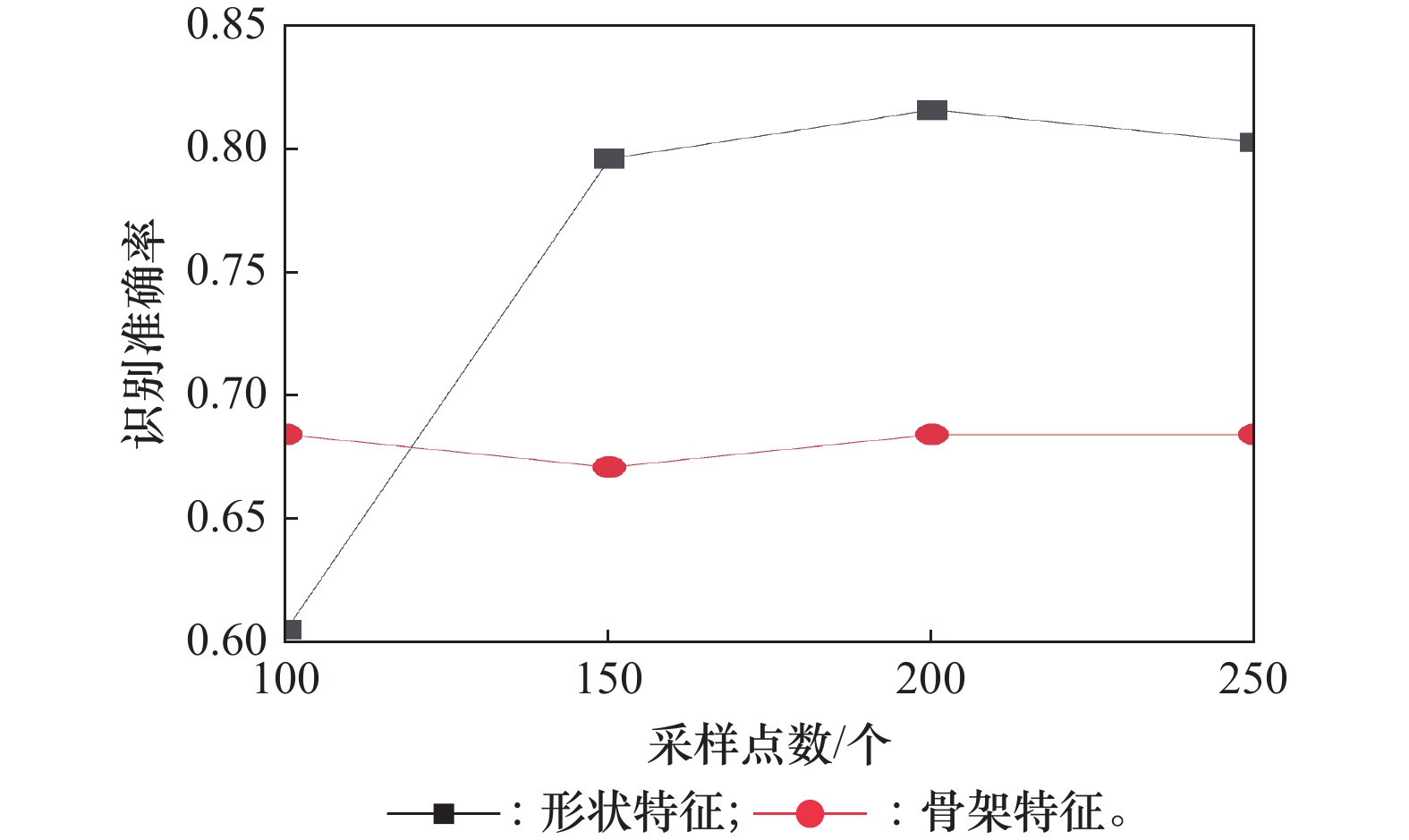
Fig.11
Processing time of shape features under different sampling points"
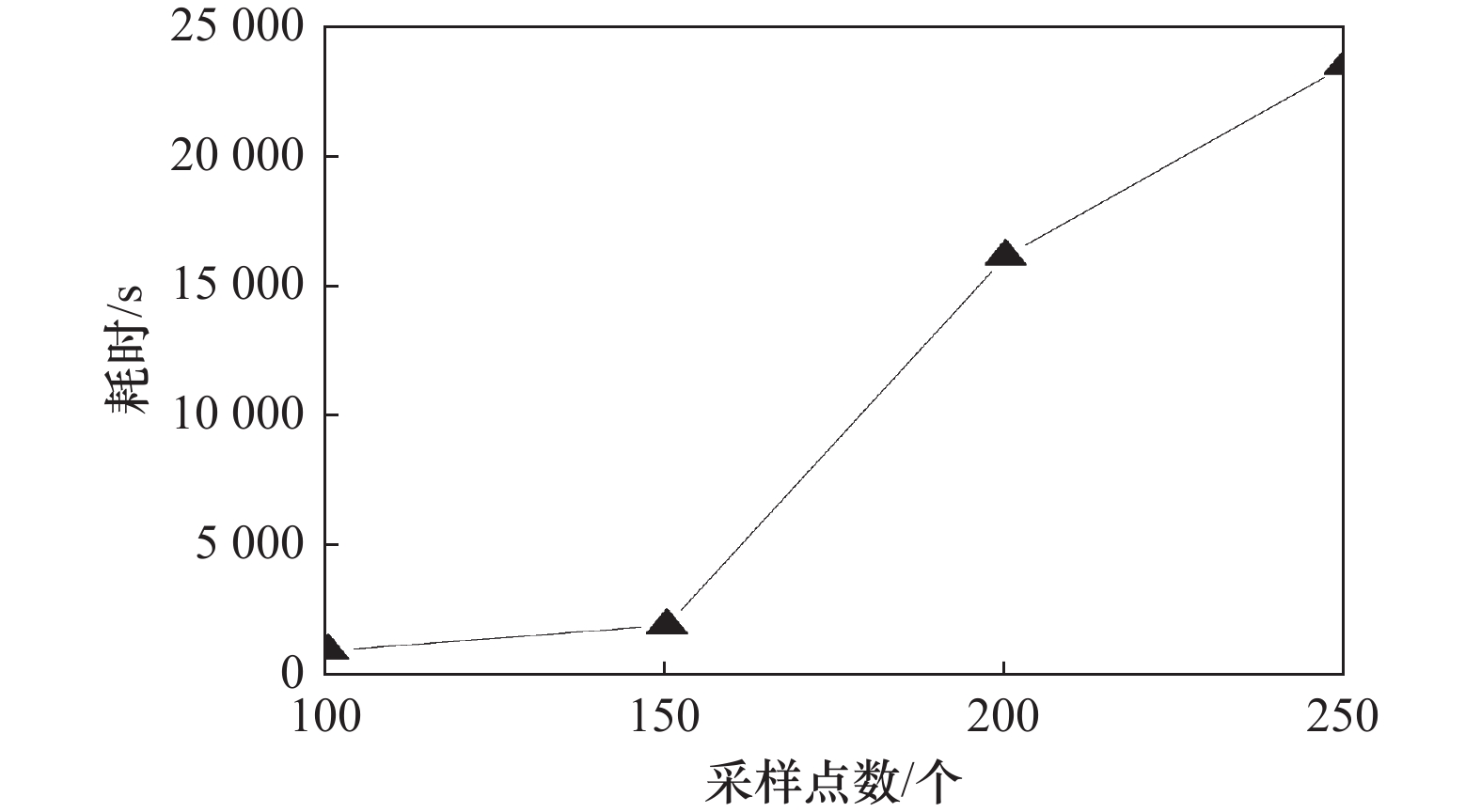
Fig.12
Identification accuracy under different down sampling point cloud density conditions"
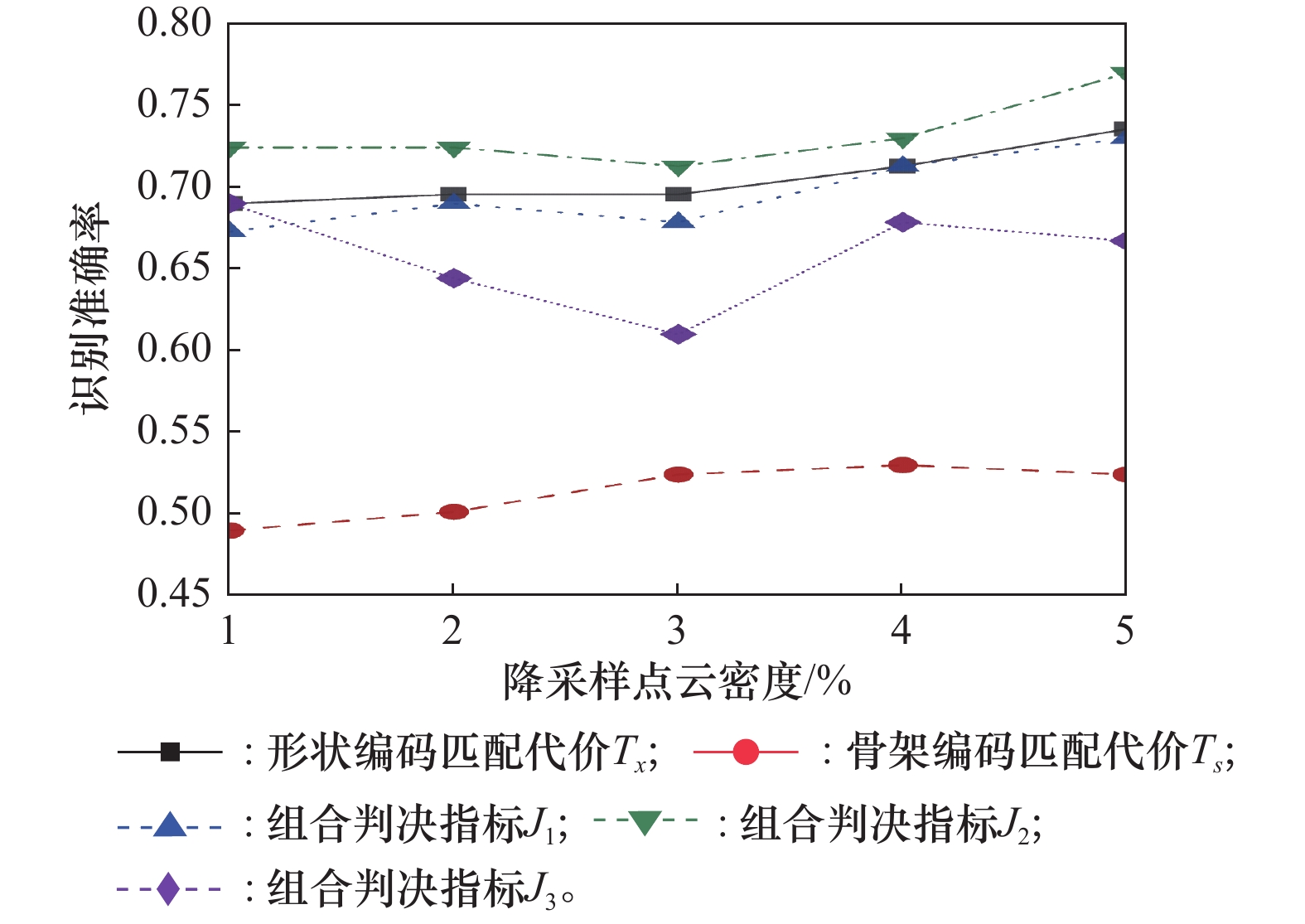
Fig.13
Recognition accuracy under different position signal-to-noise ratio conditions"
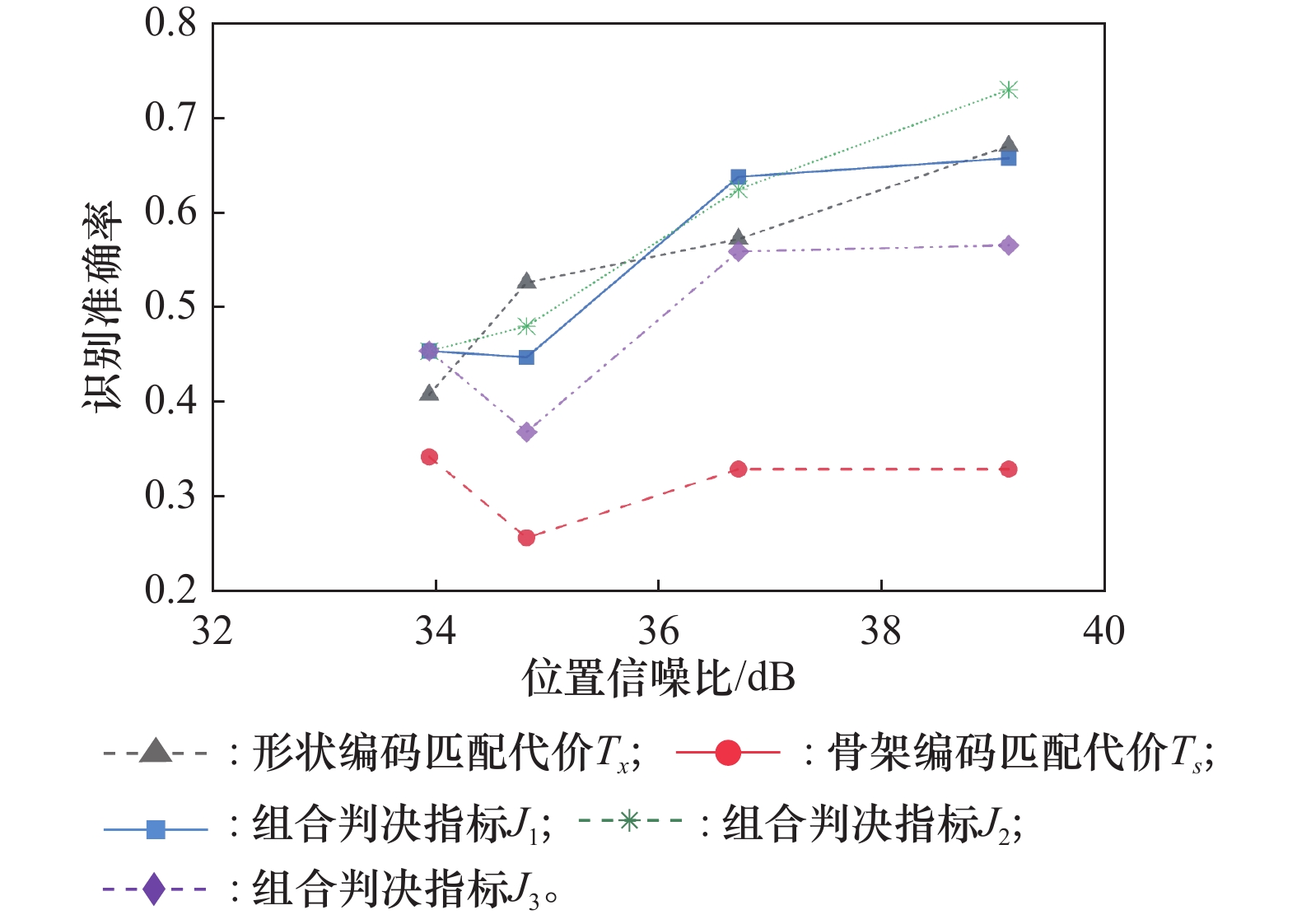
Table 2
Correlation coefficient table between ${T_x}$ and ${T_s}$"
| 皮尔逊线性相关系数 | 肯德尔秩相关系数 | 斯皮尔曼秩相关系数 |

Fig.14
Polynomial fitting diagram"
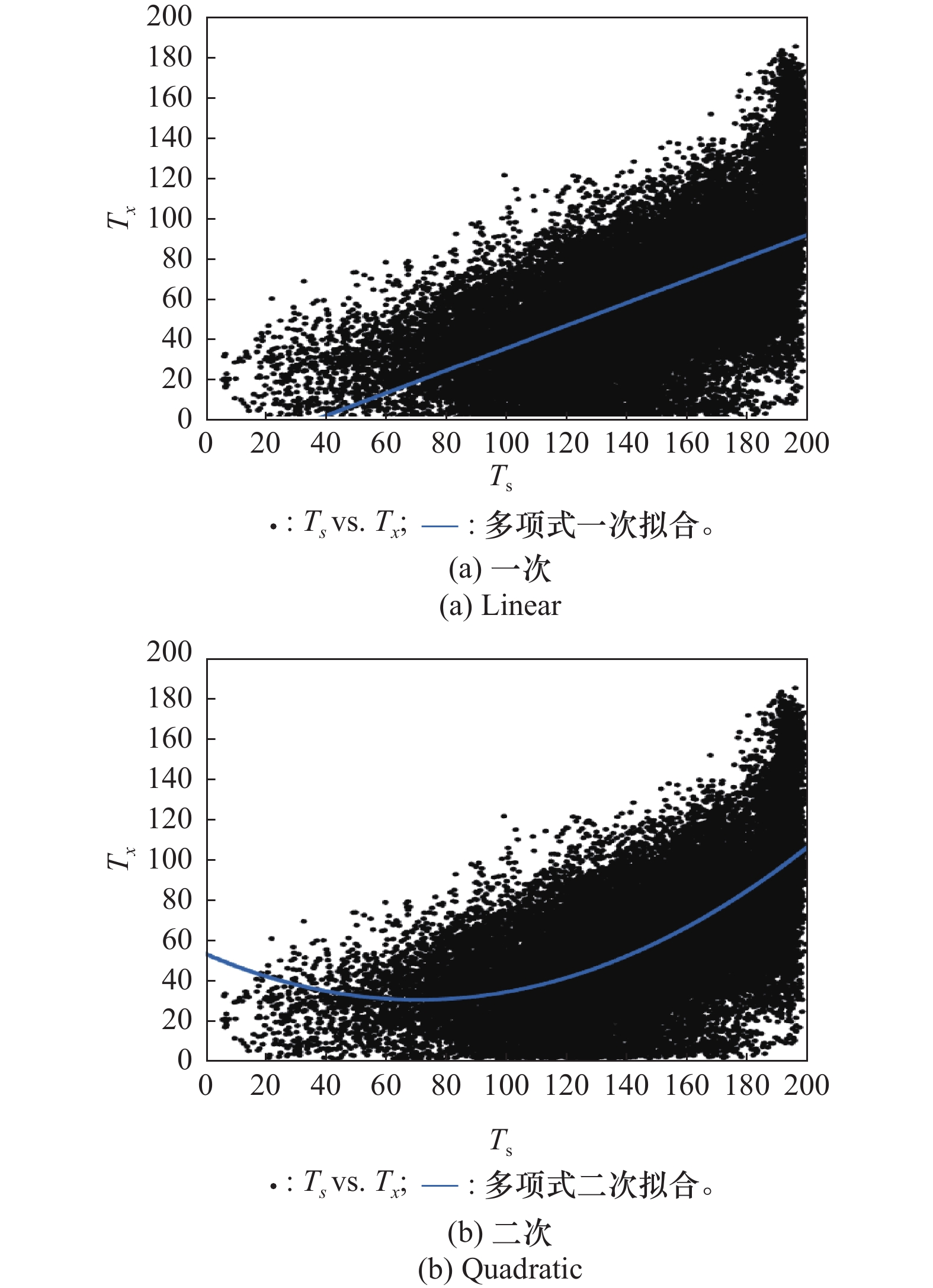

Fig.15
Exponential fitting diagram"
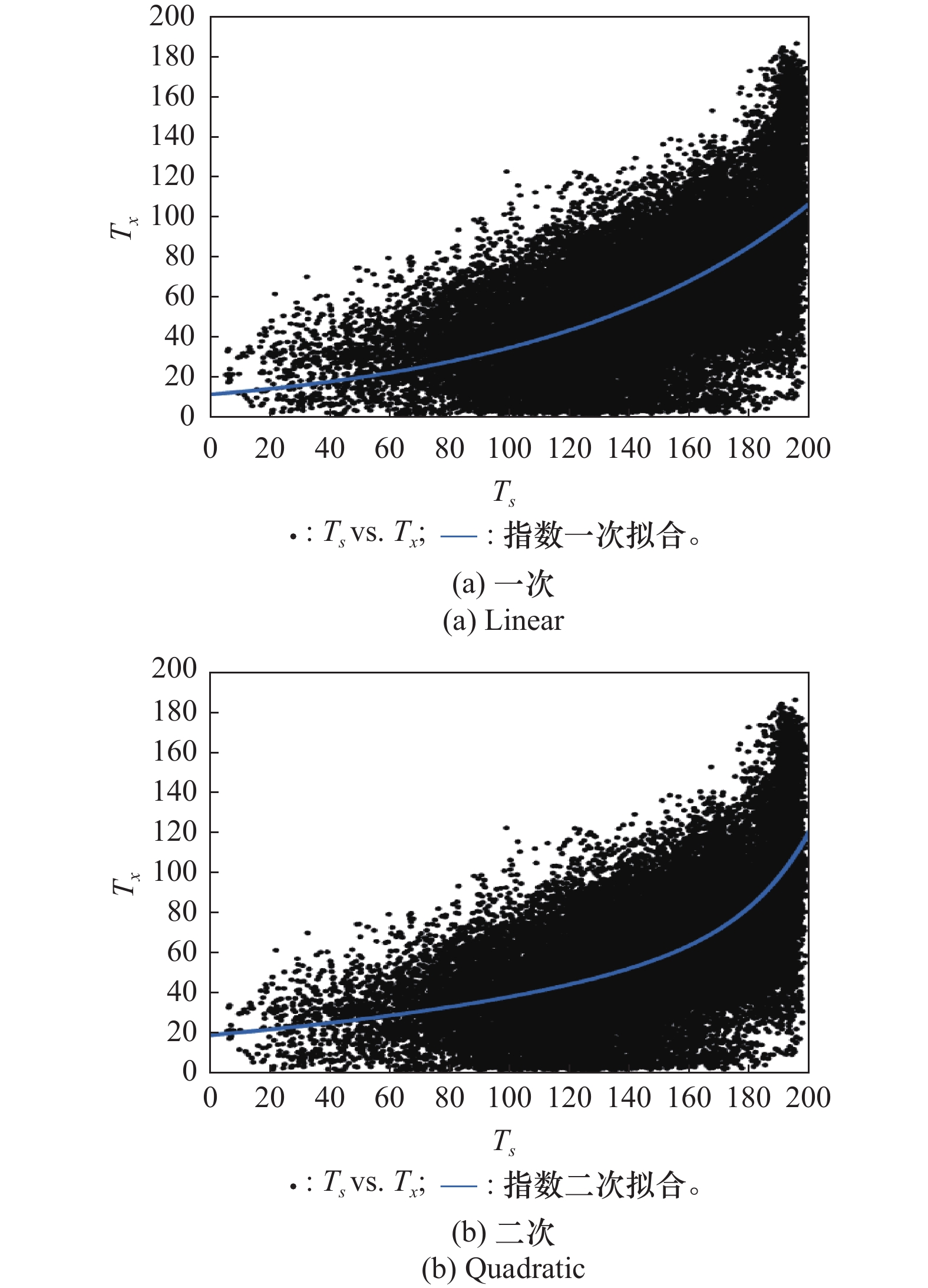
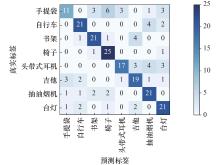
Fig.16
Confusion matrix of the skeleton matching algorithm result"
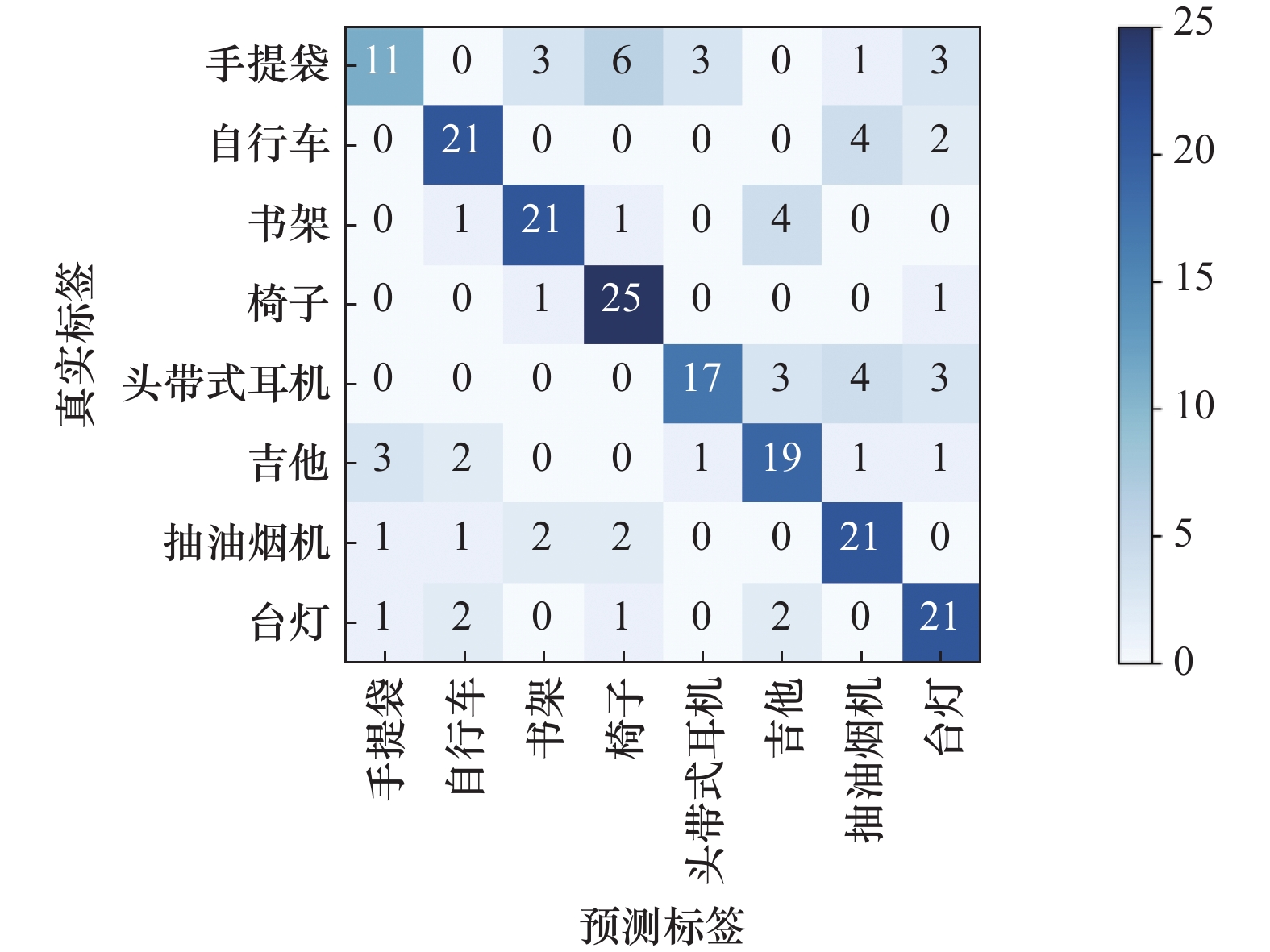
Fig.17
Confusion matrix of the shape content matching algorithm result"
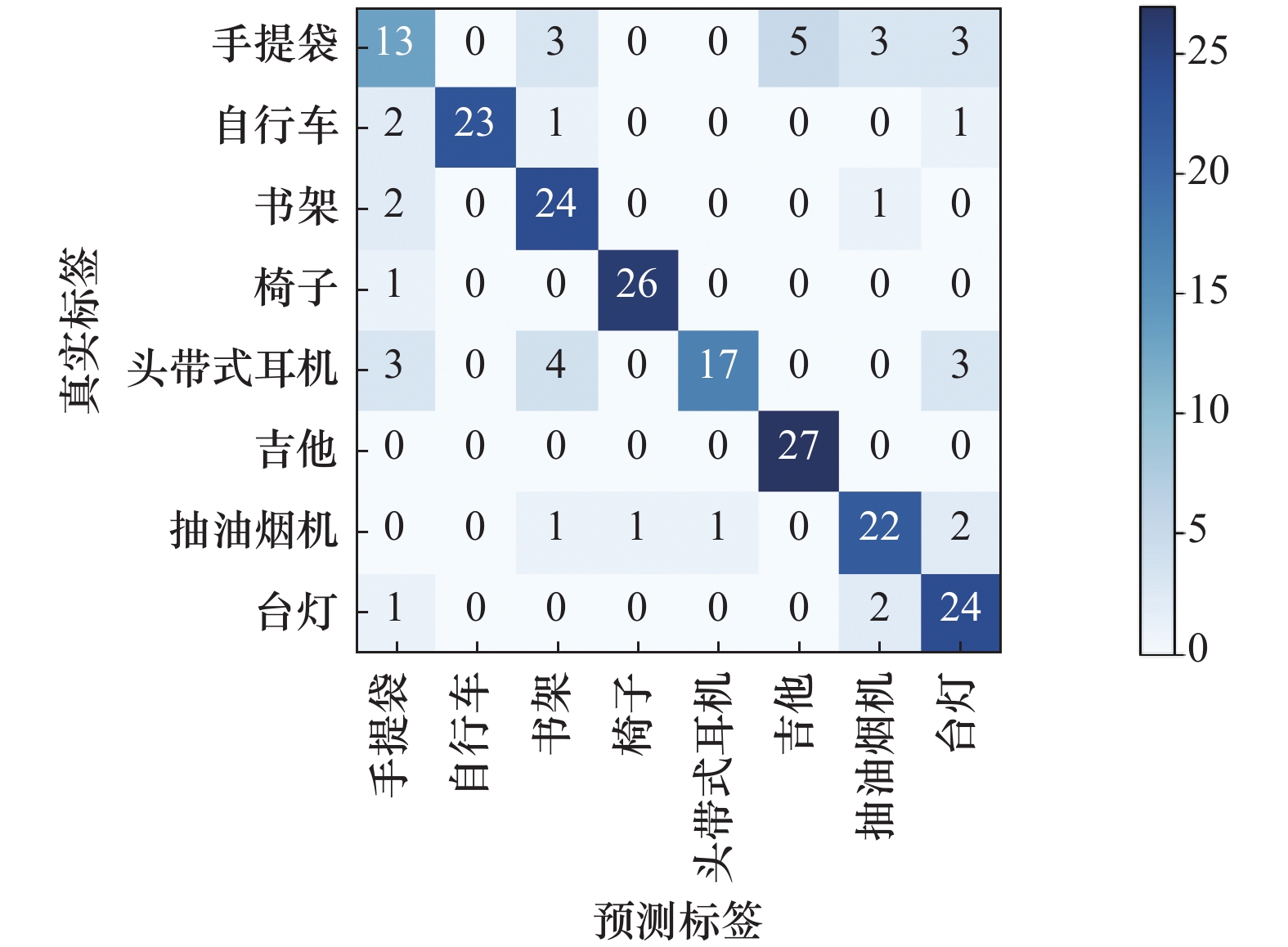
Fig.18
Confusion matrix of the proposed algorithm recognition result"
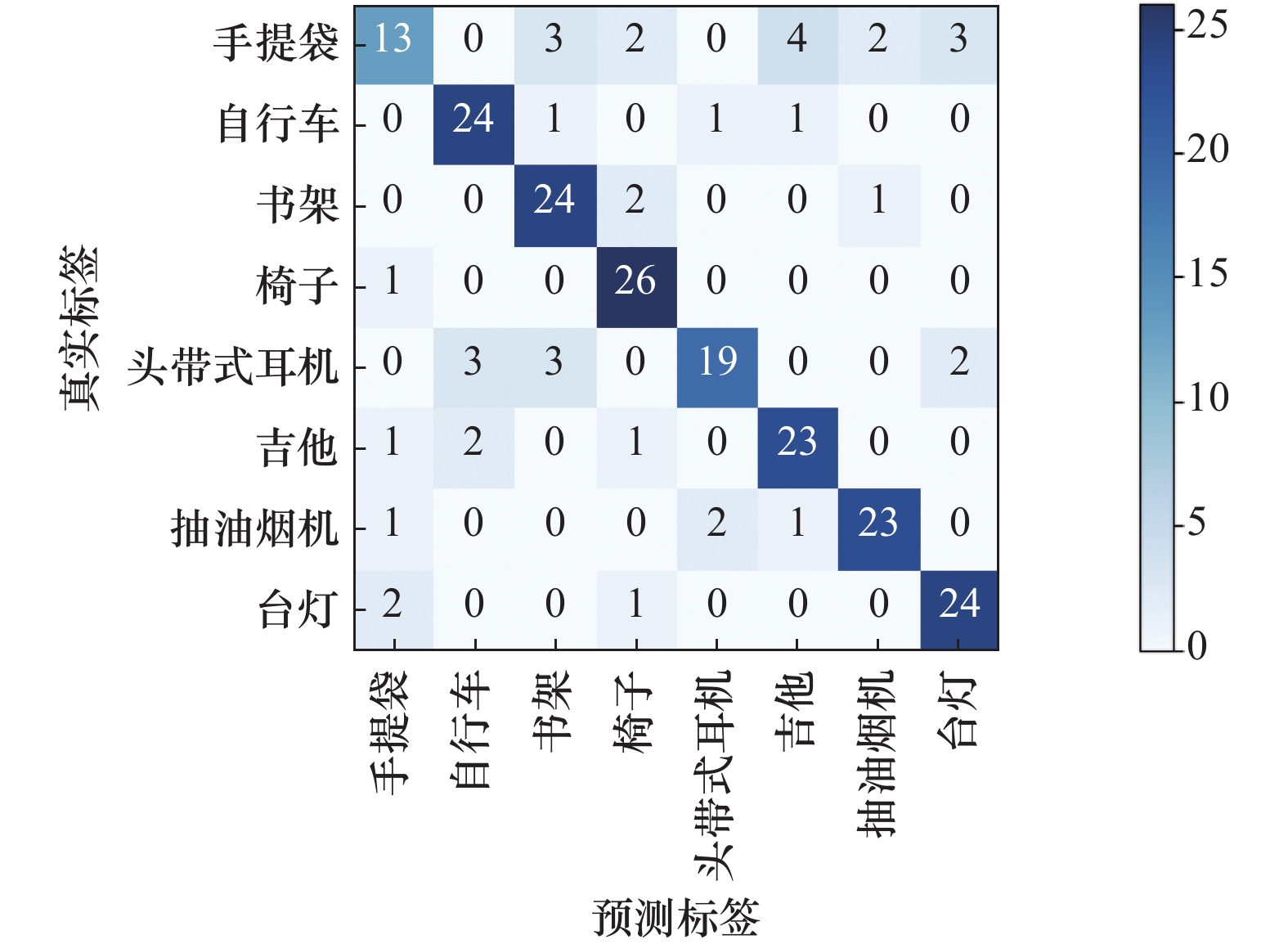
Fig.19
Comparison of recognition accuracy between the proposed algorithm and shape context algorithm under different position signal-to-noise ratios conditions"
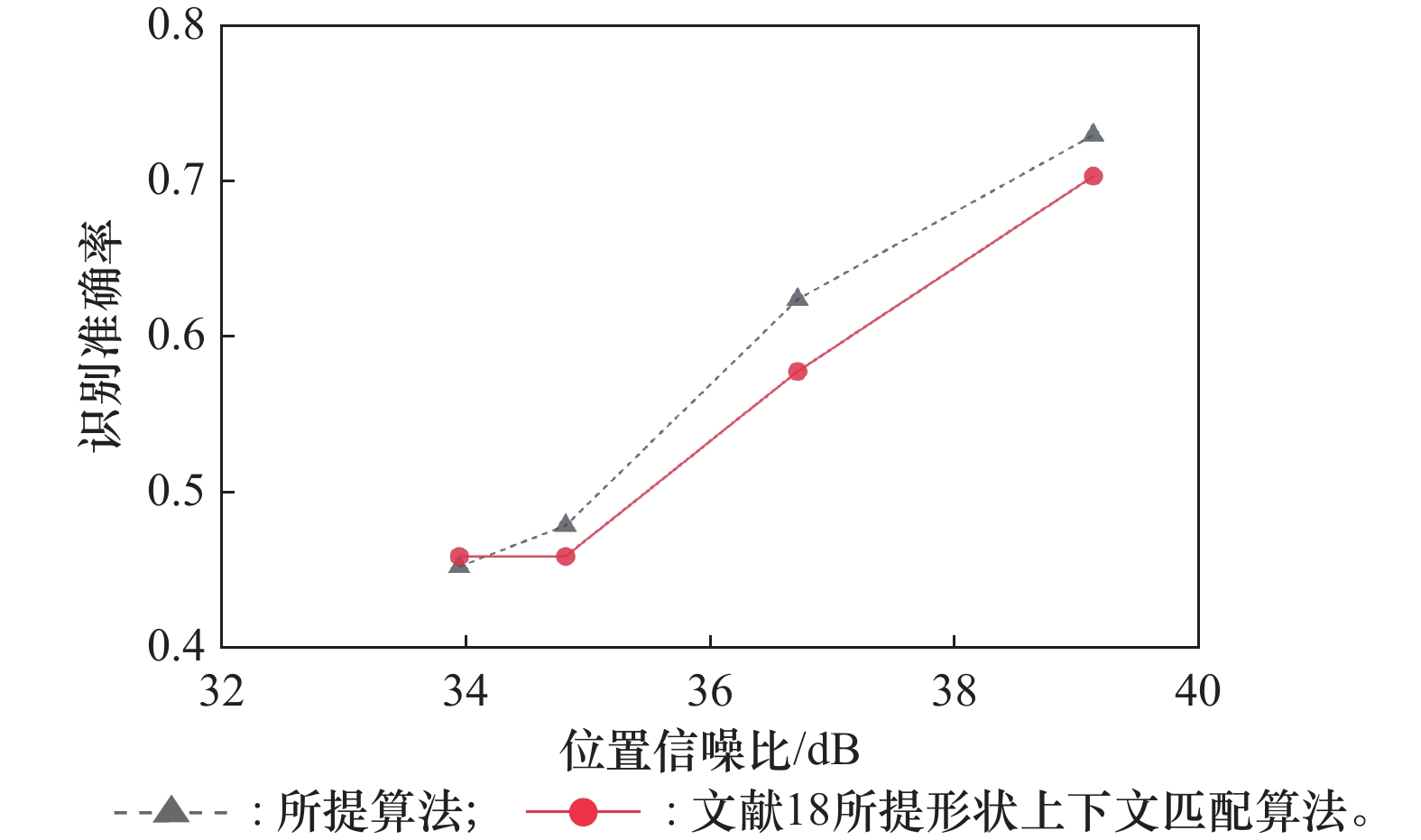

Fig.20
Original three-dimensional point cloud illustrations for the remaining five models of guitar categories"
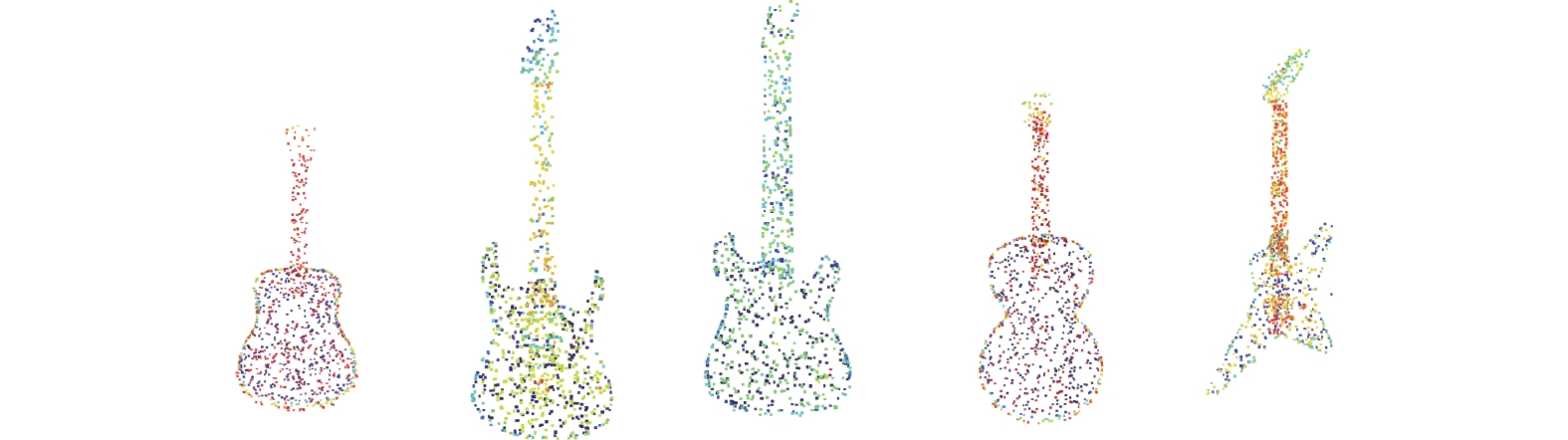

Fig.21
Original three-dimensional point cloud illustrations for four indoor object models"
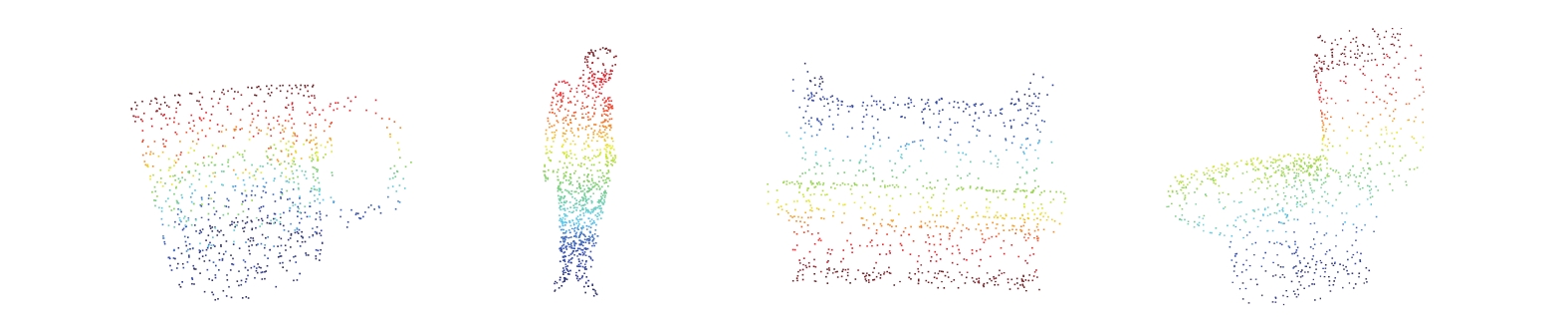

Fig.22
Confusion matrix of intra-class sample recognition results of the proposed algorithm"
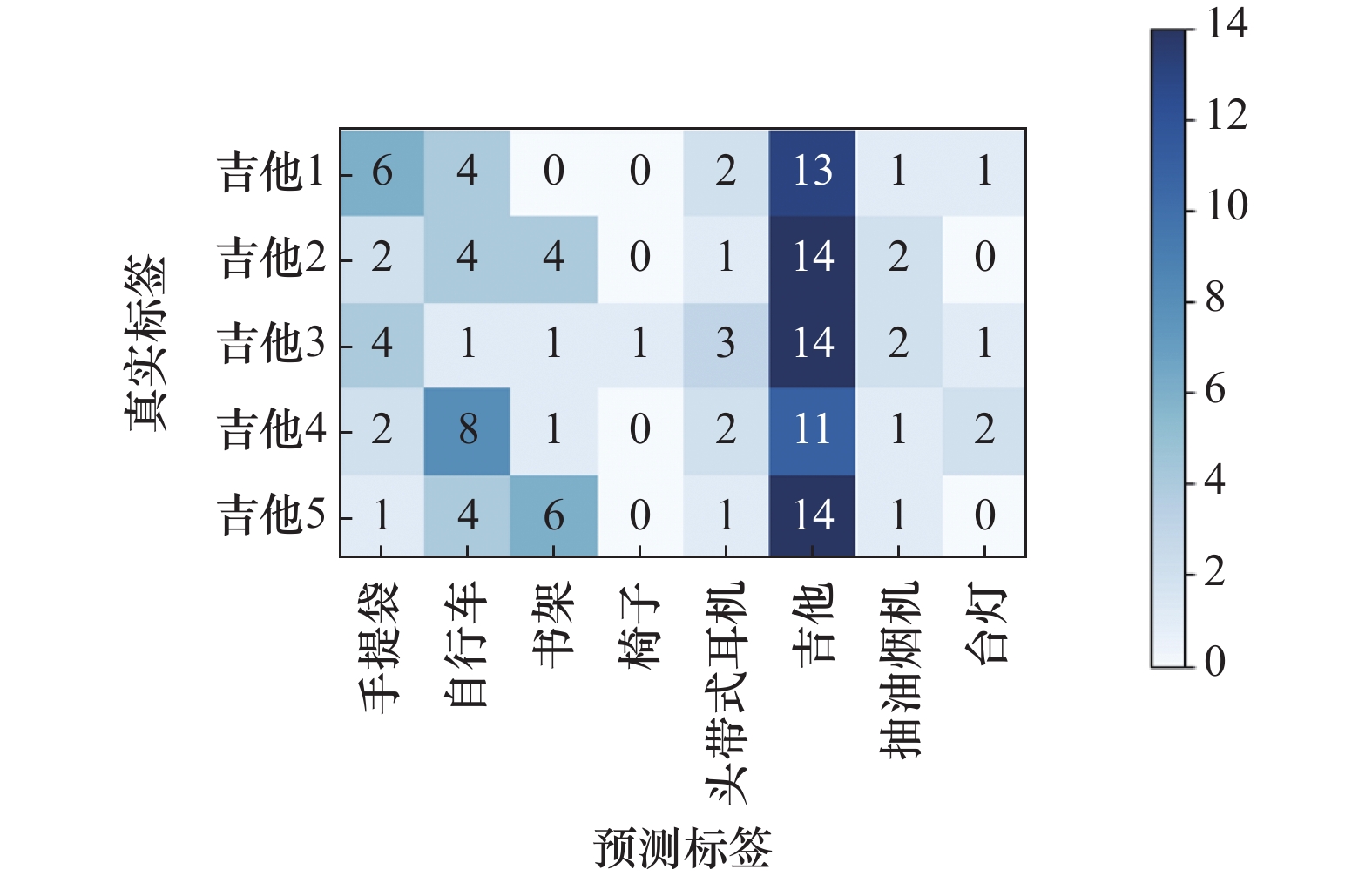
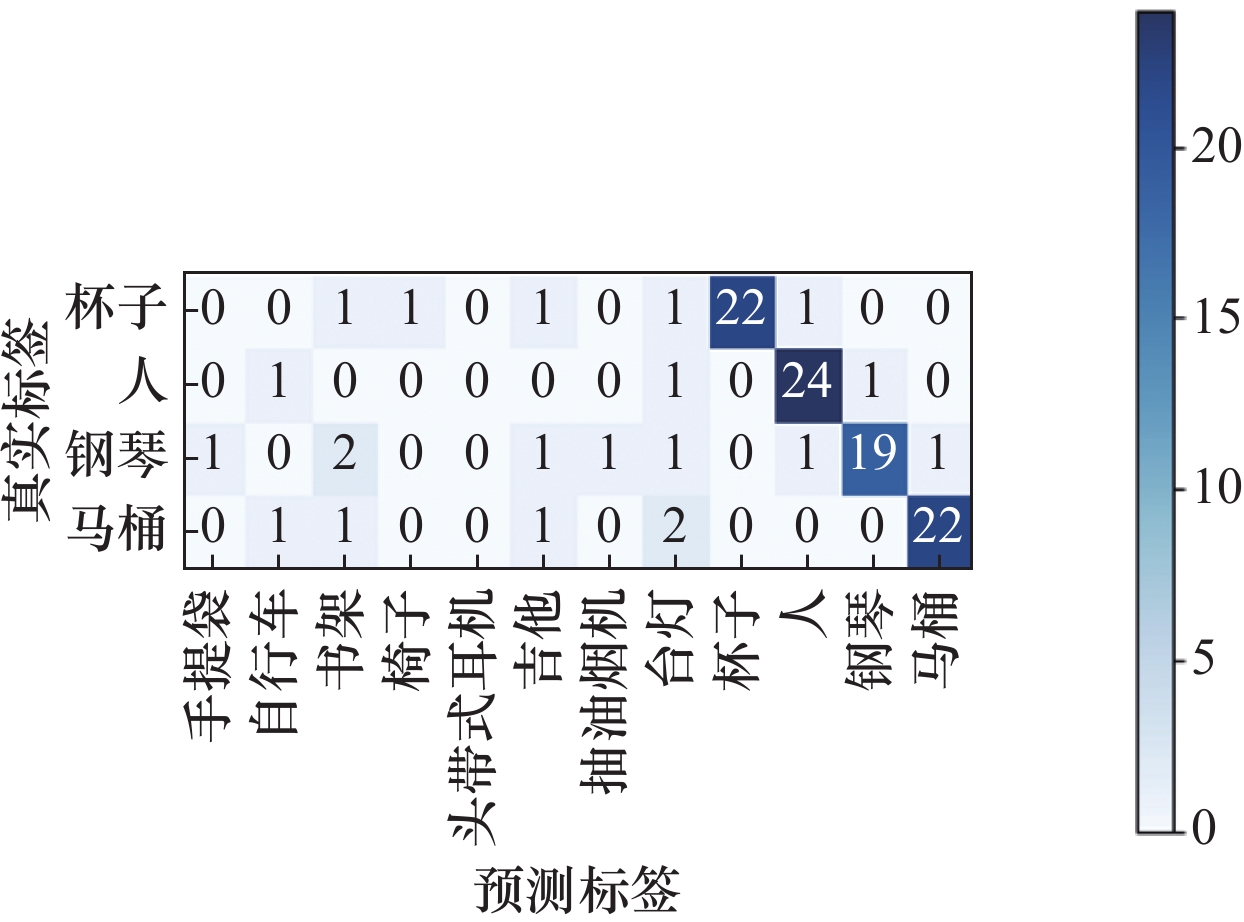
Fig.23
Confusion matrix of cross-class sample recognition results for the proposed algorithm"
| 1 |
QI S H, NING X, YANG G W, et al. Review of multi-view 3D object recognition methods based on deep learning[J]. Displays, 2021, 69, 102053.
doi: 10.1016/j.displa.2021.102053 |
| 2 | 黄奕程. 基于深度学习的三维点云混合数据增强策略研究[D]. 广东: 广东工业大学, 2022. |
| HUANG Y C. Research on 3D point cloud mix-up data enhancement strategy based on deep learning[D]. Guangdong: Guangdong University of Technology, 2022. | |
| 3 | 马天恩, 刘涛, 杜萍, 等. 一种聚合全局上下文信息的三维点云语义分割方法[J]. 武汉大学学报(信息科学版), 2025, 50 (12): 2548- 2559. |
| MA T E, LIU T, DU P, et al. A 3D point cloud semantic segmentation method for aggregating global context information[J]. Geomatics and Information Science of Wuhan University, 2025, 50 (12): 2548- 2559. | |
| 4 | 朱安迪, 达飞鹏, 盖绍彦. 对融合特征敏感的三维点云识别与分割[J]. 西安交通大学学报, 2024, 58 (5): 52- 63. |
| ZHU A D, DA F P, GAI S Y. Recognition and segmentation of point clouds sensitive to fusion features[J]. Journal of Xi’an Jiaotong University, 2024, 58 (5): 52- 63. | |
| 5 | 张健. 基于特征描述的三维点云场景中目标识别方法研究[D]. 郑州: 郑州大学, 2022. |
| ZHANG J. Research on object recognition in 3D point cloud scene based on feature description[D]. Zhengzhou: Zhengzhou University, 2022. | |
| 6 | BOULCH A, GUERRY Y, LE S B, et al. SnapNet: 3D point cloud semantic labeling with 2D deep segmentation networks[J]. Computers & Graphics, 2017, 71, 189- 198. |
| 7 | PUI C Y, GHIO S, NG B, et al. Robust 3D ISAR ship classification [C] // Proc. of the IEEE Radar Conference, 2023. |
| 8 |
DEBES C, AMIN M G, ZOUBIR A M. Target detection in single- and multiple-view through-the-wall radar imaging[J]. IEEE Trans. on Geoscience and Remote Sensing, 2009, 47 (5): 1349- 1361.
doi: 10.1109/TGRS.2009.2013460 |
| 9 | 徐守坤, 张路军, 石林, 等. 意图注意力引导的小样本3D点云目标检测[J]. 计算机工程, 2024, 50(12): 288−295. |
| XU S K, ZHANG L J, SHI L, et al. Few-shot 3D point cloud object detection guided by intention-attention[J]. Computer Engineering, 2024, 50(12): 288−295. | |
| 10 | HE S H, WANG Z J, WANGN Y G. CAsgraph: a cascade attention graph network using kernel density estimation based on LIDAR point clouds for 3D object detection[C] // Proc. of the 7th Asian Conference on Artificial Intelligence Technology, 2023: 266−272. |
| 11 |
武斌, 刘溢安, 赵洁. 结合空间结构卷积和注意力机制的三维点云分类网络[J]. 中国图象图形学报, 2024, 29 (2): 520- 532.
doi: 10.11834/jig.230137 |
|
WU B, LIU Y A, ZHAO J. Classification network for 3D point cloud based on spatial structure convolution and attention mechanism[J]. Journal of Image and Graphics, 2024, 29 (2): 520- 532.
doi: 10.11834/jig.230137 |
|
| 12 | LIN Y P, YEH Y M, CHOU Y C, et al. Attention EdgeConv for 3D point cloud classification[C] // Proc. of the Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, 2021: 2018−2022. |
| 13 |
HAN Z Z, LU H L, LIU Z B, et al. 3D2SeqViews: aggregating sequential views for 3D global feature learning by CNN with hierarchical attention aggregation[J]. IEEE Trans. on Image Processing, 2019, 28 (8): 3986- 3999.
doi: 10.1109/TIP.2019.2904460 |
| 14 | 李乔. 基于深度学习的穿墙雷达目标检测算法研究[D]. 西安: 西安电子科技大学, 2023. |
| LI Q. Research on target detection algorithm of through-wall radar based on deep learning[D]. Xi’an: Xidian University, 2023. | |
| 15 |
KAMANI M M, FARHAT F, WISTAR S, et al. Skeleton matching with applications in severe weather detection[J]. Applied Soft Computing, 2018, 70, 1154- 1166.
doi: 10.1016/j.asoc.2017.05.037 |
| 16 | NUGROHO G A, DARMAWAN S, AINA B F, et al. Automatic bow echo shape detection using combination of image processing and skeletonization in X-band radar image[C] // Proc. of the International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications, 2023: 380−385. |
| 17 | YIN J J Q, WANG S Y, LI F M. Division-of-focal-plane polarization image denoising algorithm based on improved principal component analysis[J]. Acta Optica Sinica, 2021, 41 (7): 64- 73. |
| 18 | 肖骏, 梁步阁, 杨德贵, 等. 穿墙雷达墙体参数估计以及补偿方法综述[J]. 无线电工程, 2022, 52 (11): 2023- 2034. |
| XIAO J, LIANG B G, YANG D G, et al. Review of wall parameter estimation and compensation methods of TWR[J]. Radio Engineering, 2022, 52 (11): 2023- 2034. | |
| 19 |
ZHANG T Y, SUEN C Y. A fast parallel algorithm for thinning digital patterns[J]. Communications of the ACM, 1984, 27 (3): 236- 239.
doi: 10.1145/357994.358023 |
| 20 | BAI X, LATECKI L J, Discrete skeleton evolution[C]// Proc. of the 6th International Conference on Energy Minimization Methods in Computer Vision and Pattern Recognition, 2007: 362–374. |
| 21 |
BERG A C. Shape matching and object recognition using shape contexts[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2002, 24 (4): 509- 522.
doi: 10.1109/34.993558 |
| 22 | VISHWANATH K V, GUPTA D, VAHDAT A, et al. ModelNet: towards a datacenter emulation environment [C]// Proc. of the IEEE 9th International Conference on Peer-to-Peer Computing, 2009: 81−82. |
| 23 | VISHWAKARMA S, UMMALANENI V, IQBAL M S, et al. Mitigation of through-wall interference in radar images using denoising autoencoders[C] // Proc. of the IEEE Radar Conference, 2018: 1543−1548. |
| 24 |
ROLDAN I, FIORANELLI F, YAROYOY A. Total variation compressive sensing for 3D shape estimation in short-range imaging radars[J]. IEEE Trans. on Radar Systems, 2023, 1, 583- 592.
doi: 10.1109/TRS.2023.3322630 |
| 25 | BARZEGAR A S, CHELDAVI A, SEDIGHY S H, et al. 3-D through-the-wall radar imaging using compressed sensing[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19 |
| [1] | Mingyu JIANG, Shunsheng ZHANG, Siyao XIAO. SAR target recognition based on lightweight cross-attention convolutional neural network [J]. Systems Engineering and Electronics, 2025, 47(9): 2853-2861. |
| [2] | Xinzheng ZHANG, Mengke YAN, Xiaolin ZHU. Noise pseudo-label tolerant semi-supervised SAR target recognition [J]. Systems Engineering and Electronics, 2025, 47(6): 1796-1805. |
| [3] | Caiyun WANG, Yifan JIA, Xiaofei LI, Jianing WANG, Yida WU. Ballistic target HRRP recognition method based on improved whale algorithm and BiGRU [J]. Systems Engineering and Electronics, 2025, 47(6): 1824-1832. |
| [4] | Zhijie JIANG, Heng SONG, Nan HU, Lanxi DUAN, Ping CAO. Target recognition and classification algorithm of MMW radar in tunnel [J]. Systems Engineering and Electronics, 2025, 47(5): 1453-1460. |
| [5] | Zekun GUO, Hongfei YANG, Zheng LIU, Rong XIE, Lei RAN, Jia'nan LI. Narrow-band radar airborne target recognition method based on MGMD space [J]. Systems Engineering and Electronics, 2025, 47(4): 1136-1145. |
| [6] | Jiakuan LI, Bo FENG, Hongliang LIU, Chunmao YE, Jizhou YU. Angle-guided attention-based wideband PD recognition method for aerodynamic targets [J]. Systems Engineering and Electronics, 2025, 47(3): 807-816. |
| [7] | Jianguo YIN, Wen SHENG, Wei JIANG. Radar air target recognition based on deep residual shrinkage network [J]. Systems Engineering and Electronics, 2024, 46(9): 3012-3018. |
| [8] | Caiyun WANG, Huiwen ZHANG, Jianing WANG, Yida WU, Yun CHANG. Ballistic midcourse target RCS recognition based on DTCWT-VAE [J]. Systems Engineering and Electronics, 2024, 46(7): 2269-2275. |
| [9] | Yida WU, Caiyun WANG, Jianing WANG, Xiaofei LI. Infrared multi-sensor fusion recognition method based on ISVM-DS [J]. Systems Engineering and Electronics, 2024, 46(5): 1555-1560. |
| [10] | Tong OUYANG, Ling WANG, Daiyin ZHU, Yong LI. Fine-grained recognition method for meteorological targets in ResNeXt fused with LightGBM [J]. Systems Engineering and Electronics, 2024, 46(12): 4034-4043. |
| [11] | Caiyun WANG, Yun CHANG, Xiaofei LI, Jianing WANG, Yida WU, Huiwen ZHANG. Infrared spatial cone-shaped target recognition based on improved MKELM [J]. Systems Engineering and Electronics, 2024, 46(10): 3257-3264. |
| [12] | Husheng WANG, Baixiao CHEN, Qingzhi YE. Research on anti-chaff jamming method based on measured data [J]. Systems Engineering and Electronics, 2023, 45(7): 2010-2021. |
| [13] | Zhehao WANG, Tao JIAN, Xiaodong HUANG, Haipeng WANG, Yu LIU. HRRP recognition method for sea surface targets based on angular domain feature PSO [J]. Systems Engineering and Electronics, 2023, 45(6): 1642-1650. |
| [14] | Hanyi HUANG, Shiyou HU, Shenglong GUO, Shanjun LI, Qin SHU. Sea surface micro-moving target recognition based on sparse decomposition [J]. Systems Engineering and Electronics, 2023, 45(4): 1016-1023. |
| [15] | Qingyuan ZHAO, Zhiqiang ZHAO, Chunmao YE, Yaobing LU. Micro-motion fusion recognition of double band early warning radar based on self-attention mechanism [J]. Systems Engineering and Electronics, 2023, 45(3): 708-716. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||