Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (1): 268-279.doi: 10.12305/j.issn.1001-506X.2025.01.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Reentry guidance method based on LSTM-DDPG
Xunliang YAN1,*, Kuan WANG1, Zijian ZHANG2, Peichen WANG1
- 1. Shaanxi Aerospace Flight Vehicle Design Key Laboratory, School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
2. Beijing Institute of Aerospace Systems Engineering, Beijing 100076, China
-
Received:2024-03-05Online:2025-01-21Published:2025-01-25 -
Contact:Xunliang YAN
CLC Number:
Cite this article
Xunliang YAN, Kuan WANG, Zijian ZHANG, Peichen WANG. Reentry guidance method based on LSTM-DDPG[J]. Systems Engineering and Electronics, 2025, 47(1): 268-279.
share this article

Fig.1
Schematic diagram of LSTM model"


Fig.2
LSTM forgetting gate"


Fig.3
LSTM input gate"


Fig.4
LSTM output gate"


Fig.5
LSTM-DDPG algorithm flowchart"


Fig.6
Actor network"


Fig.7
Critic network"


Fig.8
Flowchart of reentry guidance algorithm based on LSTM-DDPG"
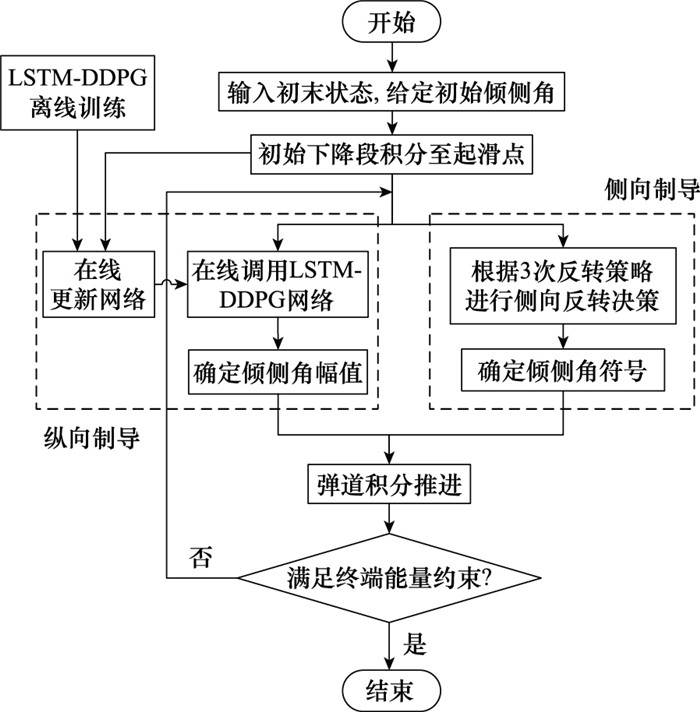
Table 1
Super parameters of reinforce learning network"
| 参数 | 数值 |
| 最大训练次数M | 3 000 |
| 样本池容量 | 105 |
| 每次训练抽取样本数N | 256 |
| Target网络更新率τ | 0.001 |
| Actor网络学习率ημ | 10-5 |
| Critic网络学习率ηQ | 10-4 |
Table 2
Offline training results"
| 算法 | 平均累计奖励 |
| LSTM-DDPG | -6.01 |
| DDPG | -6.28 |

Fig.9
Offline training process"


Fig.10
Simulation result curves of three methods"

Table 3
Terminal deviation result of three algorithms"
| 算法 | |Δhf|/km | |ΔVf|/(m/s) | |Δstogof|/km | 制导指令更新平均耗时/ms |
| 1 | 0.445 | 1.36 | 0.50 | 15.5 |
| 2 | 0.556 | 1.52 | 3.61 | 1.3 |
| 3 | 0.434 | 1.56 | 0.53 | 1.4 |
Table 4
Applicability simulation conditions"
| 算法 | θ0/(°) | ϕ0/(°) | ψ0/(°) | θf*/(°) | ϕf*/(°) | s0/km |
| 1 | 30 | 30 | 340 | -40 | 70 | 6 134.6 |
| 2 | -30 | 10 | 0 | -40 | 70 | 6 709.3 |
| 3 | -130 | 60 | 70 | -40 | 70 | 3 950.9 |
| 4 | 60 | 70 | 280 | -40 | 70 | 3 377.9 |
Table 5
Applicability simulation terminal deviation"
| 算法 | |Δhf|/km | |ΔVf|/(m/s) | |Δstogof|/km |
| 1 | 0.434 | 1.56 | 0.53 |
| 2 | 0.575 | 1.78 | 0.48 |
| 3 | 0.675 | 2.14 | 0.69 |
| 4 | 0.632 | 2.41 | 0.67 |

Fig.11
Applicability simulation curve"

Table 6
Parameter bias setting"
| 不确定参数 | 3σ |
| ρ/% | 10 |
| CL/% | 10 |
| CD/% | 10 |
| h0/km | 3 |
| V0/(m/s) | 100 |
| θ0/(°) | 0.5 |
| ϕ0/(°) | 0.5 |
| γ0/(°) | 0.5 |
| ψ0/(°) | 0.5 |

Fig.12
Shooting results"

Table 7
Target terminal parameters"
| 终端参数 | 均值 | 标准差 |
| hf/km | 25.76 | 0.15 |
| θf/(°) | -38.73 | 0.021 9 |
| ϕf/(°) | 69.84 | 0.014 6 |
| Vf/(m/s) | 1 998.4 | 0.48 |
Table 8
Target data from different methods"
| 算法 | 参数 | hf/km | θf/(°) | ϕf/(°) | Vf/(m/s) |
| 1 | 均值 | 25.40 | -38.74 | 69.84 | 1 998.5 |
| 标准差 | 0.05 | 0.016 5 | 0.015 4 | 0.35 | |
| 2 | 均值 | 25.90 | -38.69 | 69.85 | 1 993.3 |
| 标准差 | 0.11 | 0.047 6 | 0.035 1 | 0.82 | |
| 3 | 均值 | 25.76 | -38.73 | 69.84 | 1 998.4 |
| 标准差 | 0.10 | 0.021 9 | 0.014 6 | 0.48 |
| 1 | 张远龙, 谢愈. 滑翔飞行器弹道规划与制导方法综述[J]. 航空学报, 2020, 41 (1): 023377. |
| ZHANG Y L , XIE Y . Review of trajectory planning and gui-dance methods for gliding vehicles[J]. Acta Aeronautica et Astro- nautica Sinica, 2020, 41 (1): 023377. | |
| 2 | ZHAO S , ZHU J W , BAO W M , et al. High-dynamic intelligent maneuvering guidance strategy via deep reinforcement learning[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237 (11): 154- 165. |
| 3 |
LEAVITTE J A , MEASE K D . Feasible trajectory generation for atmospheric entry guidance[J]. Journal of Guidance, Control and Dynamics, 2007, 30 (2): 473- 481.
doi: 10.2514/1.23034 |
| 4 |
XUE S B , LU P . Constrained predictor-corrector entry guidance[J]. Journal of Guidance, Control, and Dynamics, 2010, 33 (4): 1273- 1281.
doi: 10.2514/1.49557 |
| 5 |
郭冬子, 黄荣, 许河川, 等. 再入飞行器深度确定性策略梯度制导方法研究[J]. 系统工程与电子技术, 2022, 44 (6): 1942- 1949.
doi: 10.12305/j.issn.1001-506X.2022.06.21 |
|
GUO D Z , HUANG R , XU H C , et al. Research on gradient guidance method for depth deterministic strategy of reentry aircraft[J]. Systems Engineering and Electronics, 2022, 44 (6): 1942- 1949.
doi: 10.12305/j.issn.1001-506X.2022.06.21 |
|
| 6 | LUO X L , CHEN C , ZENG C N , et al. Deep reinforcement learning for joint trajectory planning, transmission scheduling, and access control in UAV-assisted wireless sensor networks[J]. Sensors(Basel, Switzerland), 2023, 23 (10): 423- 434. |
| 7 |
LEE G T , KIM K J , JANG J . Real-time path planning of controllable UAV by subgoals using goal-conditioned reinforcement learning[J]. Applied Soft Computing, 2023, 146, 110660.
doi: 10.1016/j.asoc.2023.110660 |
| 8 |
GUO Y F , LIU Z P . UAV path planning based on deep reinforcement learning[J]. International Journal of Advanced Network, Monitoring and Controls, 2023, 8 (3): 81- 88.
doi: 10.2478/ijanmc-2023-0068 |
| 9 |
LI H T , LV X , ZHANG S . Multi-objective deep reinforcement learning based joint beamforming and power allocation in UAV assisted cellular communication[J]. Wireless Personal Communications, 2024, 134 (2): 809- 829.
doi: 10.1007/s11277-024-10927-5 |
| 10 |
YANG L B , CAI Y Q , WEI H . Unmanned aerial vehicle-assisted wideband cognitive radio network based on DDQN-SAC[J]. EURASIP Journal on Advances in Signal Processing, 2024, 2024, 43.
doi: 10.1186/s13634-024-01141-3 |
| 11 | LI J , CAO S , LIU X J , et al. Trans-UTPA: PSO and MADDPG based multi-UAVs trajectory planning algorithm for emergency communication[J]. Frontiers in Neurorobotics, 2023, 16 (1): 432- 440. |
| 12 | XUE J J , ZHU J , DU J T , et al. Dynamic path planning for multiple UAVs with incomplete information[J]. Electronics, 2023, 12 (4): 123- 132. |
| 13 |
ZHAO Z X , CHEN J , XIN B , et al. Learning scalable task assignment with imperative-priori conflict resolution in multi-UAV adversarial swarm defense problem[J]. Journal of Systems Science and Complexity, 2024, 37 (1): 369- 388.
doi: 10.1007/s11424-024-4029-8 |
| 14 |
ZHU J Y , KUANG M C , ZHOU W Q , et al. Mastering air combat game with deep reinforcement learning[J]. Defence Technology, 2024, 34, 295- 312.
doi: 10.1016/j.dt.2023.08.019 |
| 15 |
DAS P P , WANG P , NIU C X . Reentry trajectory design of a hypersonic vehicle based on reinforcement learning[J]. Journal of Physics: Conference Series, 2023, 2633 (1): 012005.
doi: 10.1088/1742-6596/2633/1/012005 |
| 16 | WU T C , WANG H L , LIU Y H , et al. Learning-based interfered fluid avoidance guidance for hypersonic reentry vehicles with multiple constraints[J]. ISA Transactions, 2023, 39 (1): 139- 150. |
| 17 | 惠俊鹏, 汪韧, 郭继峰. 基于强化学习的禁飞区绕飞智能制导技术[J]. 航空学报, 2023, 44 (11): 240- 252. |
| HUI J P , WANG R , GUO J F . Intelligent guidance technology for no fly zone detour based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (11): 240- 252. | |
| 18 | 方科, 张庆振, 倪昆, 等. 飞行时间约束下的再入制导律[J]. 哈尔滨工业大学学报, 2019, 51 (10): 90- 97. |
| FANG K , ZHANG Q Z , NI K , et al. Reentry guidance law under flight time constraints[J]. Journal of Harbin Institute of Technology, 2019, 51 (10): 90- 97. | |
| 19 | 张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42 (7): 1400- 1411. |
| ZHANG W Q , YU W B , LI J L , et al. Intelligent lateral maneuvering and re-entry coordinated guidance for aircraft based on longitudinal analytical solutions[J]. Acta Armamentarii, 2021, 42 (7): 1400- 1411. | |
| 20 | ZHU J W , ZHANG H , ZHAO S , et al. Multi-constrained intelligent gliding guidance via optimal control and DQN[J]. SCIENCE CHINA Information Sciences, 2023, 66 (3): 214- 229. |
| 21 | 高嘉时. 升力式再入飞行器轨迹优化与制导方法研究[D]. 武汉: 华中科技大学, 2019. |
| GAO J S. Research on trajectory optimization and guidance methods for lift type re-entry vehicles[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| 22 | CHENG Y, SHUI Z S, XU C, et al. Cross-cycle iterative unmanned aerial vehicle reentry guidance based on reinforcement learning[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2019: 587-592. |
| 23 | 武天才, 王宏伦, 刘一恒, 等. 基于深度强化学习与高度速率反馈的再入制导方法[J]. 无人系统技术, 2022, 5 (4): 1- 13. |
| WU T C , WANG H L , LIU Y H , et al. Reentry guidance method based on deep reinforcement learning and high rate feedback[J]. Unmanned Systems Technology, 2022, 5 (4): 1- 13. | |
| 24 | 汪韧, 惠俊鹏, 俞启东, 等. 基于LSTM模型的飞行器智能制导技术研究[J]. 力学学报, 2021, 53 (7): 2047- 2057. |
| WANG R , HUI J P , YU Q D , et al. Research on intelligent guidance technology for aircraft based on LSTM model[J]. Chinese Journal of Theoretical and Applied Mechanics, 2021, 53 (7): 2047- 2057. | |
| 25 |
彭余萧, 何真, 仇靖雯. 基于LSTM-DDPG算法的四翼变掠角飞行器主动变形决策[J]. 北京航空航天大学学报,
doi: 10.13700/j.bh.1001-5965.2023.0513 |
|
PENG Y X , HE Z , QIU J W . Active deformation decision-making of four wing variable sweep angle aircraft based on LSTM-DDPG algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,
doi: 10.13700/j.bh.1001-5965.2023.0513 |
|
| 26 | XIE Y , LIU L H , TANG G J , et al. Highly constrained entry trajectory generation[J]. Acta Astronautica, 2013, 88, 44- 60. |
| 27 | LU P . Entry guidance: a unified method[J]. Journal of Gui-dance, Control, and Dynamics, 2014, 37 (3): 713- 728. |
| 28 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E. Imagenet classification with deep convolutional neural networks[C]//Proc. of the Advances in Neural Information Processing Systems, 2012: 1097-1105. |
| 29 | LIANG S Y, SRIKANT R. Why deep neural networks for function approximation?[EB/OL].[2024-02-05]. https://arxiv.org/abs/1610.04161. |
| 30 | SHEN Z J , LU P . Dynamic lateral entry guidance logic[J]. Journal of Guidance, Control, and Dynamics, 2004, 27 (6): 949- 959. |
| [1] | Tingyu ZHANG, Ying ZENG, Nan LI, Hongzhong HUANG. Spacecraft power-signal composite network optimization algorithm based on DRL [J]. Systems Engineering and Electronics, 2024, 46(9): 3060-3069. |
| [2] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [3] | Zhipeng YANG, Zihao CHEN, Chang ZENG, Song LIN, Jindi MAO, Kai ZHANG. Online route planning decision-making method of aircraft in complex environment [J]. Systems Engineering and Electronics, 2024, 46(9): 3166-3175. |
| [4] | Lisha PENG, Yuxiang SUN, Yufan XUE, Xianzhong ZHOU. Intelligent decision-making technology for wargame by integrating three-way multiple attribute decision-making and SAC [J]. Systems Engineering and Electronics, 2024, 46(7): 2310-2322. |
| [5] | Hongda GUO, Jingtao LOU, Youchun XU, Peng YE, Yongle LI, Jinsheng CHEN. Event-triggered communication of multiple unmanned ground vehicles collaborative based on MADDPG [J]. Systems Engineering and Electronics, 2024, 46(7): 2525-2533. |
| [6] | Mengyu ZHANG, Yajie DOU, Ziyi CHEN, Jiang JIANG, Kewei YANG, Bingfeng GE. Review of deep reinforcement learning and its applications in military field [J]. Systems Engineering and Electronics, 2024, 46(4): 1297-1308. |
| [7] | Yanling LI, Feizhou LUO, Zhilei GE. Robust observer-based deep reinforcement learning for attitude stabilization of vertical takeoff and landing vehicle [J]. Systems Engineering and Electronics, 2024, 46(3): 1038-1047. |
| [8] | Heng TANG, Wei SUN, Lei LYU, Ruofei HE, Jianjun WU, Changhao SUN, Tianye SUN. UAV formation path planning approach incorporating dynamic reward strategy [J]. Systems Engineering and Electronics, 2024, 46(10): 3506-3518. |
| [9] | Luwei FENG, Songtao LIU, Huazhi XU. Intelligent radar jamming decision-making method based on POMDP model [J]. Systems Engineering and Electronics, 2023, 45(9): 2755-2760. |
| [10] | Yue MA, Lin WU, Xiao XU. Cooperative targets assignment based on multi-agent reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(9): 2793-2801. |
| [11] | Daozhi WEI, Zhaoyu ZHANG, Jiahao XIE, Ning LI. Multi-sensor cross cueing technique based on improved Actor-Critic algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1624-1632. |
| [12] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [13] | Xinzhi LI, Shengbo DONG, Xiangyang CUI. Reinforcement learning technology based on asymmetric unobservable state [J]. Systems Engineering and Electronics, 2023, 45(6): 1755-1761. |
| [14] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [15] | Licheng YE, Jun WANG, Shaoqing MAO, Shuai LIU. Fast communication jamming decision-making method based on multi-parameter joint stepwise discretization [J]. Systems Engineering and Electronics, 2023, 45(5): 1518-1525. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||