Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 3176-3184.doi: 10.12305/j.issn.1001-506X.2024.09.29
• Guidance, Navigation and Control • Previous Articles
Consensus control for input-delay multi-agent system with input constraint
Weimin IU1,2, Yongyue WANG1, Xinyang MA3,*, Jinkun LIU3
- 1. North Automatic Control Technology Institute, Taiyuan 030006, China
2. School of Automation, Beijing Institute of Technology, Beijing 100081, China
3. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
-
Received:2023-07-07Online:2024-08-30Published:2024-09-12 -
Contact:Xinyang MA
CLC Number:
Cite this article
Weimin IU, Yongyue WANG, Xinyang MA, Jinkun LIU. Consensus control for input-delay multi-agent system with input constraint[J]. Systems Engineering and Electronics, 2024, 46(9): 3176-3184.
share this article

Fig.1
Communication topology diagram"

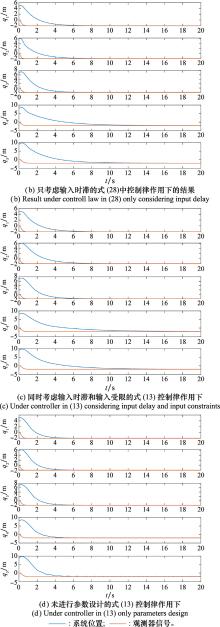
Fig.2
System position"


Fig.3
System velocity"


Fig.4
Control input"

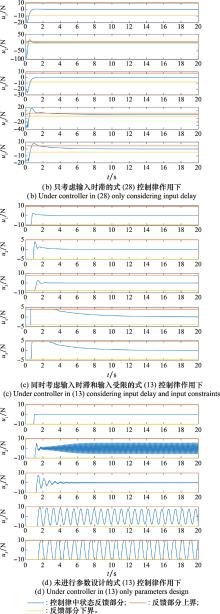
Fig.5
State feedback part of control law"

| 1 |
WANGW,LONGJ,WENC Y,et al.Recent advances in distributed adaptive consensus control of uncertain nonlinear multi-agent systems[J].Journal of Control and Decision,2020,7(1):44-63.
doi: 10.1080/23307706.2019.1693913 |
| 2 |
LIZ C,ZHAOY,YANH C.Active disturbance rejection formation tracking control for uncertain nonlinear multi-agent systems with switching topology via dynamic event-triggered extended state observer[J].IEEE Trans.on Circuits and Systems Ⅰ: Regular Papers,2023,70(1):518-529.
doi: 10.1109/TCSI.2022.3216484 |
| 3 |
SOLTERA,LINF H,WEND W,et al.Data-driven multi-agent vehicle routing in a congested city[J].Information,2021,12(11):447.
doi: 10.3390/info12110447 |
| 4 |
LIY,WANGC L,LIANGD Y.Truncated prediction-based distributed consensus control of linear multi-agent systems with discontinuous communication and input delay[J].Neurocomputing,2020,409,217-230.
doi: 10.1016/j.neucom.2020.05.048 |
| 5 | 刘建刚,杨胜杰.具有容性负载的直流微电网系统分布式协同控制[J].自动化学报,2020,46(6):1283-1290. |
| LIUJ G,YANGS J.Distributed cooperative control of DC microgrid systems with capacitive loads[J].Acta Automatica Sinica,2020,46(6):1283-1290. | |
| 6 |
TANM J,LIUZ,CHENC L P,et al.Optimized adaptive consensus tracking control for uncertain nonlinear multiagent systems using a new event-triggered communication mechanism[J].Information Sciences: an International Journal,2022,605,301-316.
doi: 10.1016/j.ins.2022.05.030 |
| 7 |
LIUC,LIUL,CAOJ,et al.Intermittent event-triggered optimal leader-following consensus for nonlinear multi-agent systems via actor-critic algorithm[J].IEEE Trans.on Neural Networks and Learning Systems,2023,34(8):3992-4006.
doi: 10.1109/TNNLS.2021.3122458 |
| 8 | 钟佳岐,陈晓雷,曾诚.具有执行器饱和的多智能体系统H无穷边界一致性控制[J].系统科学与数学,2023,43(1):29-43. |
| ZHONGJ Q,CHENX L,ZENGC.Multi-agent system H infinite boundary consistency control with actuator saturation[J].Journal of Systems Science and Mathematical Sciences,2023,43(1):29-43. | |
| 9 |
SHIL,GOUK X,XIED M.Convergence analysis of first-order discrete multi-agent systems with cooperative-competitive mechanisms[J].Applied Mathematics Computation,2021,410,126462.
doi: 10.1016/j.amc.2021.126462 |
| 10 |
FANX Y,CHENS J,WANGX L.Distributed H∞ consensus problem for first-order multi-agent systems with antagonistic interactions and nonconvex constraints[J].Journal of Systems Science and Complexity,2023,36(2):540-554.
doi: 10.1007/s11424-023-1250-9 |
| 11 |
WANGH,RENW,YUW W,et al.Fully distributed consensus control for a class of disturbed second-order multi-agent systems with directed networks[J].Automatica,2021,132,109816.
doi: 10.1016/j.automatica.2021.109816 |
| 12 |
MIAOS X,SUH S.Second-order hybrid consensus of multi- agent systems with matrix-weighted networks[J].IEEE Trans. on Network Science and Engineering,2022,9(6):4338-4348.
doi: 10.1109/TNSE.2022.3199444 |
| 13 |
YUM Y,HEW,YANGT,et al.Bipartite consensus of higher- order multi-agent systems based on event-triggered control and signed network[J].Journal of Control and Decision,2021,8(2):233-242.
doi: 10.1080/23307706.2020.1733446 |
| 14 |
WANGC L,WENC Y,GUOL.Adaptive consensus control for nonlinear multiagent systems with unknown control directions and time-varying actuator faults[J].IEEE Trans.on Automatic Control,2021,66(9):4222-4229.
doi: 10.1109/TAC.2020.3034209 |
| 15 |
GONGJ Y,MAY J,JIANGB,et al.Fault-tolerant formation tracking control for heterogeneous multiagent systems with directed topology[J].Guidance, Navigation and Control,2021,1(1):2150001.
doi: 10.1142/S2737480721500011 |
| 16 |
ABBAST,HEIDARA,MASOUDS.Fault-tolerant consensus of nonlinear multi-agent systems with directed link failures, communication noise and actuator faults[J].International Journal of Control,2021,94(1):60-74.
doi: 10.1080/00207179.2019.1583376 |
| 17 |
WANGC L,GUOL,WENC Y,et al.Attitude coordination control for spacecraft with disturbances and event-triggered communication[J].IEEE Trans.on Aerospace and Electroinc Systems,2021,57(1):586-596.
doi: 10.1109/TAES.2020.3027408 |
| 18 |
DENGY,LECHAPPEV,MOULAYE,et al.Predictor-based control of lti remote systems with estimated time-varying delays[J].IEEE Control Systems Letters,2021,5(1):289-294.
doi: 10.1109/LCSYS.2020.3001671 |
| 19 |
WANGY Y,LIS Z,WANGD,et al.Adaptive time-delay control for cable-driven manipulators with enhanced nonsingular fast terminal sliding mode[J].IEEE Trans.on Industrial Electronics,2021,68(3):2356-2367.
doi: 10.1109/TIE.2020.2975473 |
| 20 |
ALDANAC,GRACIAL,NUNOE,et al.Space teleoperation with time-delays and without velocity measurements via a bounded controller[J].IEEE Control Systems Letters,2023,7,1141-1146.
doi: 10.1109/LCSYS.2022.3232223 |
| 21 |
GUOH H,MENGM,FENGG.Lyapunov-based output containment control of heterogeneous multi-agent systems with markovian switching topologies and distributed delays[J].IEEE/CAA Journal of Automatica Sinica,2023,10(6):1421-1433.
doi: 10.1109/JAS.2023.123198 |
| 22 |
KONGF C,ZHUQ X,HUANGT W.New fixed-time stability analysis of delayed discontinuous systems via an augmented indefinite Lyapunov-Krasovskii functional[J].IEEE Trans.on Cybernetics,2022,52(12):13438-13447.
doi: 10.1109/TCYB.2021.3128142 |
| 23 |
SONGY X,LIZ Y,ZHOUB.Stability analysis of linear neutral delay systems with two delays via augmented Lyapunov-Krasovskii functionals[J].IEEE Trans.on Circuits and Systems Ⅰ: Regular Papers,2023,70(1):460-471.
doi: 10.1109/TCSI.2022.3216576 |
| 24 |
NGUYENT.Exponential state estimate of positive systems with time-varying delays: a Lyapunov-Razumikhin approach[J].IMA Journal of Mathematical Control and Information,2023,40(2):135-151.
doi: 10.1093/imamci/dnad003 |
| 25 |
SUNY D,SUH S,WANGX L,et al.Scaled consensus of exponentially unstable networked systems with time-varying input delay[J].IEEE Trans.on Systems, Man, and Cybernetics,2023,53(7):4548-4559.
doi: 10.1109/TSMC.2023.3253511 |
| 26 |
CHOIH,OHS.Event-triggered global regulation of an uncertain chain of integrators under unknown time-varying input delay[J].IEICE Trans.on Fundamentals of Electronics, Communications and Computer Sciences,2022,E105/A(7):1091-1095.
doi: 10.1587/transfun.2021EAL2095 |
| 27 |
PARKJ,CHOIH,OHS.Global regulation of a chain of integrators with an unknown delay in the input via reduced-order observer based output feedback with a gain-scaling factor[J].International Journal of Control, Automation and Systems,2022,20(9):2868-2878.
doi: 10.1007/s12555-021-0543-9 |
| 28 | JIN,YANGH J,LIUJ K.Coordination and vibration control for two sets of flexible satellites with input constraints and actuator failures[J].Journal of Vibration Control,2021,27(11/12):1281-1296. |
| 29 |
LUC D,HEZ Q,CHENL F,et al.Suppressing coupled axial- torsional vibration of drill-string system considering regenerative cutting induced delay and actuator saturation[J].IEEE Trans.on Industrial Electronics,2023,70(11):11608-11617.
doi: 10.1109/TIE.2022.3231288 |
| 30 |
WANGY J,SONGY D.Leader-following control of high-order multi-agent systems under directed graphs: pre-specified finite time approach[J].Automatica,2018,87,113-120.
doi: 10.1016/j.automatica.2017.09.017 |
| [1] | Qianglong WANG, Xiaoguang GAO, Bicong WU, Zijian HU, Kaifang WAN. Review of research on restricted Boltzmann machine and its variants [J]. Systems Engineering and Electronics, 2024, 46(7): 2323-2345. |
| [2] | Jie ZHANG, Kairong LIU, Jinbao CHEN, Yingxue ZHANG, Chuanzhi CHEN, Hongzhi YU, Yunxiao ZHANG. Multi-agents formation control method based on space confrontation [J]. Systems Engineering and Electronics, 2024, 46(6): 2082-2091. |
| [3] | Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG. Integrated design of group formation control and tracking of UAV swarm [J]. Systems Engineering and Electronics, 2023, 45(3): 848-858. |
| [4] | Jiapeng LYU, Xianjun SHI, Liang QIN, Chaolun ZHAO. Research on fault propagation path identification method based on causality [J]. Systems Engineering and Electronics, 2023, 45(12): 4090-4100. |
| [5] | Yang XU, Mingren HAN, Jiang SHAO, Delin LUO. Attitude antagonistic consensus control of satellite swarm system based on MRPs [J]. Systems Engineering and Electronics, 2021, 43(7): 1904-1911. |
| [6] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking control of multi-UAV formation with prescribed performance guarantees [J]. Systems Engineering and Electronics, 2021, 43(4): 1069-1079. |
| [7] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [8] | Jiayi LIU, Gang WANG, Jie ZHANG, Chuang WANG, Xituan SONG. Target optimal assignment model based on improved AGD-distributed multi-Agent system [J]. Systems Engineering and Electronics, 2020, 42(4): 863-870. |
| [9] | Huansen FU, Baotong CUI, Bo ZHUANG, Jianzhong ZHANG. Mobile control of a class of distributed parameter systems with input delay [J]. Systems Engineering and Electronics, 2020, 42(11): 2600-2606. |
| [10] | SHEN Zhipeng, CAO Xiaoming. Extended state observer based dynamic surface output feedback control for quadrotor UAV trajectory tracking with input constraints#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2766-2774. |
| [11] | WANG Pengfei, WANG Jie, LUO Chang, JIA Yingjie. Fuzzy back-stepping control of a flexible air-breathing hypersonic vehicle with input constraints [J]. Systems Engineering and Electronics, 2017, 39(3): 612-619. |
| [12] | LIU Rui, ZHOU Jun, LI Xin, LIU Ying-ying. Design of sensor location based on directed graph of the aircraft components on diagnostic criteria [J]. Systems Engineering and Electronics, 2014, 36(10): 2013-2017. |
| [13] | WANG Hai-bo, XU Min-qiang, WANG Ri-xin, LI Yu-qing. Spacecraft TT&C resource scheduling based on improved Pareto ant colony optimization algorithm [J]. Journal of Systems Engineering and Electronics, 2012, 34(4): 719-725. |
| [14] | NING Ning, ZHANG Jun, GAO Xiang-yang, XUE Jing. Formal verification of SDG diagnosability via symbolic model checking [J]. Journal of Systems Engineering and Electronics, 2011, 33(2): 390-394. |
| [15] | TANG Zhi-gang, YANG Bing-ru, YANG Jun. New outlier detection algorithm based on Markov chain [J]. Journal of Systems Engineering and Electronics, 2010, 32(12): 2721-2724. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||