Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 3166-3175.doi: 10.12305/j.issn.1001-506X.2024.09.28
• Guidance, Navigation and Control • Previous Articles
Online route planning decision-making method of aircraft in complex environment
Zhipeng YANG, Zihao CHEN, Chang ZENG, Song LIN, Jindi MAO, Kai ZHANG
- System Design Institute of Hubei Aerospace Technology Academy, Wuhan 430040, China
-
Received:2023-05-11Online:2024-08-30Published:2024-09-12 -
Contact:Song LIN
CLC Number:
Cite this article
Zhipeng YANG, Zihao CHEN, Chang ZENG, Song LIN, Jindi MAO, Kai ZHANG. Online route planning decision-making method of aircraft in complex environment[J]. Systems Engineering and Electronics, 2024, 46(9): 3166-3175.
share this article
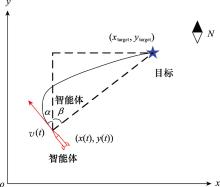
Fig.1
Aircraft motion model"


Fig.2
Schematic diagram of aircraft detection"
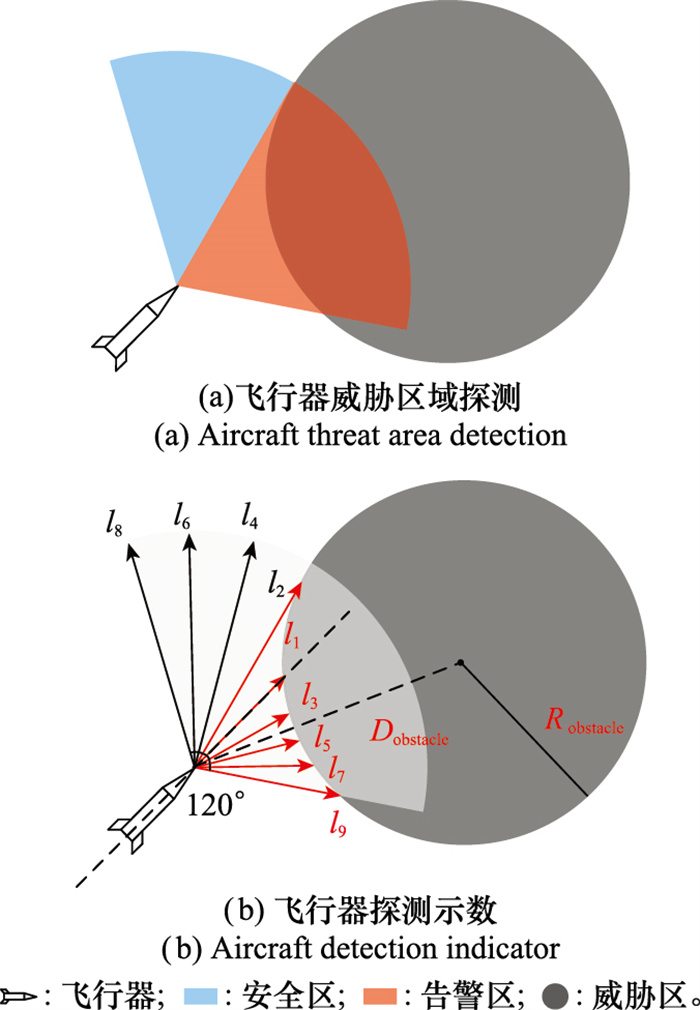
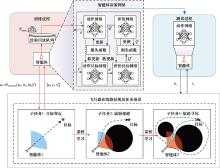
Fig.3
Model framework of aircraft online route planning based on CL-DDPG"


Fig.4
Simulation experiment environment"

Table 1
Parameters about task-related constraint"
| 航路规划任务参数 | 数值 |
| 最大速度/(m·s-1) | 300 |
| 最大加速度/(m·s-2) | 20 |
| 最大角速度/((°)/s) | 1 |
| 探测距离/km | 10 |
| 威胁区数量 | 0~10 |
| 威胁区半径/km | 3~12 |
Table 2
Parameters of algorithm model"
| 算法模型参数 | 数值 |
| 经验回放队列容量M | 100 000 |
| 采样大小Nbatch | 128 |
| 最大训练回合数E | 2 000 |
| 每回合最大步长T | 600 |
| 网络更新频率Ttrain/(次/训练步长) | 30 |
| 动作网络学习率la | 0.01~0.000 1 |
| 评价网络学习率lc | 0.02~0.000 1 |
| 折扣因子γ | 0.97 |
| 软更新率τ | 0.01 |
Table 3
Parameters of CL"
| CL参数 | 数值 |
| 子课程1预训练回合数E1 | 200 |
| 子课程1初始高斯噪声方差σ1(0) | 3 |
| 子课程2预训练回合数E2 | 300 |
| 子课程2初始高斯噪声方差σ2(0) | v |
| 子课程3预训练回合数E3 | 500 |
| 子课程3初始高斯噪声方差σ3(0) | 0.5 |
| 噪声衰减系数 | 0.999 95 |

Fig.5
Aircraft reward curve in training"

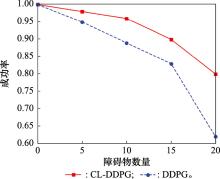
Fig.6
Success rate of aircraft online route planning under different number of threat areas"
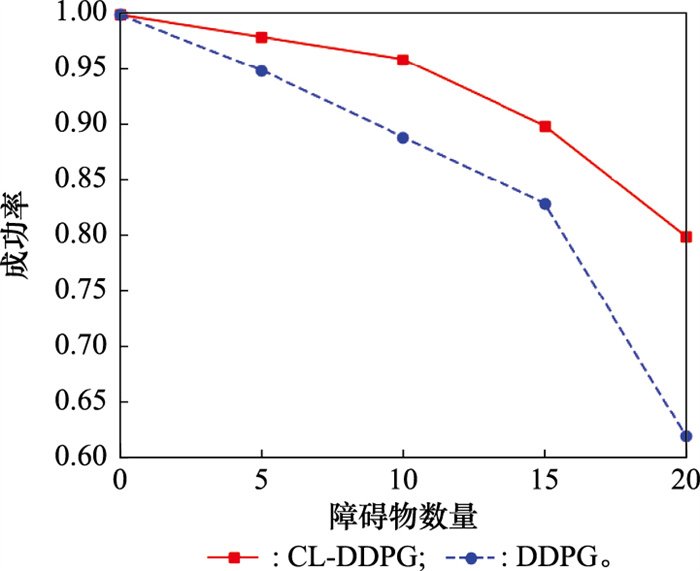

Fig.7
Online route planning decision-making verification for aircraft based on CL-DDPG"


Fig.8
Simulation verification of online route planning of aircraft in complex dynamic scenario"


Fig.9
Aircraft state parameters"
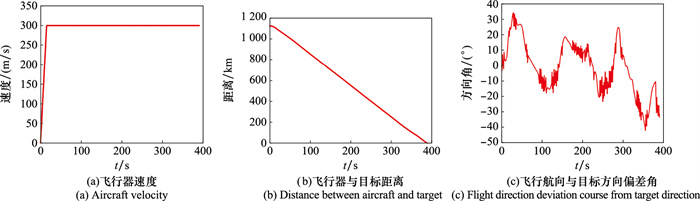

Fig.10
Generalization test of aircraft online route planning model in complex dynamic unknown scenarios"


Fig.11
Success rate of aircraft online route planning in dynamic scenarios"

Table 4
Average completion time of aircraft route planning mission in dynamic scenarios s"
| 算法 | 0个移动威胁区 | 3个移动威胁区 | 6个移动威胁区 | 9个移动威胁区 |
| CL-DDPG DDPG | 307 311 | 318 326 | 334 379 | 371 412 |
| 1 |
GUIX H,ZHANGJ F,PENGZ H.Trajectory clustering for arrival aircraft via new trajectory representation[J].Journal of Systems Engineering and Electronics,2021,32(2):473-486.
doi: 10.23919/JSEE.2021.000040 |
| 2 | NIKLASG,TOBIASB,DIRKN.Deep reinforcement learning with combinatorial actions spaces: an application to prescriptive maintenance[J].Computers & Industrial Engineering,2023,179(1):109165. |
| 3 |
WANGX Y,YANGY P,WANGD,et al.Mission-oriented cooperative 3D path planning for modular solar-powered aircraft with energy optimization[J].Chinese Journal of Aeronautics,2022,35(1):98-109.
doi: 10.1016/j.cja.2021.04.015 |
| 4 |
LIB,YANGZ P,CHEND Q,et al.Maneuvering target tracking of UAV based on MN-DDPG and transfer learning[J].Defence Technology,2021,17(2):457-466.
doi: 10.1016/j.dt.2020.11.014 |
| 5 |
LIUC S,ZHANGS J.Novel robust control framework for morphing aircraft[J].Journal of Systems Engineering and Electronics,2013,24(2):281-287.
doi: 10.1109/JSEE.2013.00035 |
| 6 |
OBAJEMUO,MAHFOUFM,MAIYARL M,et al.Real-time four-dimensional trajectory generation based on gain-sche-duling control and a high-fidelity aircraft model[J].Engineering,2021,7(4):495-506.
doi: 10.1016/j.eng.2021.01.009 |
| 7 |
赵岩,吴建峰,高育鹏.基于多智能体导航的高超飞行器信息融合方法[J].系统工程与电子技术,2020,42(2):405-413.
doi: 10.3969/j.issn.1001-506X.2020.02.20 |
|
ZHAOY,WUJ F,GAOY P.Information fusion method of hypersonic vehicle based on multi-agent navigation[J].Systems Engineering and Electronics,2020,42(2):405-413.
doi: 10.3969/j.issn.1001-506X.2020.02.20 |
|
| 8 | 陈宗基,张汝麟,张平,等.飞行器控制面临的机遇与挑战[J].自动化学报,2013,39(6):703-710. |
| CHENZ J,ZHANGR L,ZHANGP,et al.Flight control: challenges and opportunities[J].Acta Automatica Sinica,2013,39(6):703-710. | |
| 9 | DUCHONF,BABINECA,KAJANM,et al.Path planning with modified a star algorithm for a mobile robot[J].Procedia Engineering,2014,96(1):59-69. |
| 10 | LIUJ H,YANGJ,LIUH P,et al.An improved ant colony algorithm for robot path planning[J].Soft Computing,2017,21(1):5829-5839. |
| 11 | LI X Q, QIU L, AZIZ S, et al. Control method of UAV based on RRT * for target tracking in cluttered environment[C]//Proc. of the 7th International Conference on Power Electronics Systems and Applications-Smart Mobility, Power Transfer & Security, 2017. |
| 12 | 杨杰. 具有端点方向约束的快速航迹规划方法研究[D]. 武汉: 华中科技大学, 2013. |
| YANG J. Research on fast route planning method adapted to directional endpoint constraints[D]. Wuhan: Huazhong University of Science and Technology, 2013. | |
| 13 |
高科,宋佳,艾绍洁,等.高超声速飞行器再入段LQR自抗扰控制方法设计[J].宇航学报,2020,41(11):1418-1423.
doi: 10.3873/j.issn.1000-1328.2020.11.007 |
|
GAOK,SONGJ,AIS J,et al.LQR active disturbance rejection control method design for hypersonic vehicles in reentry phase[J].Journal of Astronautics,2020,41(11):1418-1423.
doi: 10.3873/j.issn.1000-1328.2020.11.007 |
|
| 14 |
MNIHV,KAVUKCUOGLUK,SILVERD,et al.Human-level control through deep reinforcement learning[J].Nature,2015,518(7540):529-533.
doi: 10.1038/nature14236 |
| 15 | LILLICRAP T P, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning[EB/OL]. [2023-04-30]. http://www.arxiv.org/abs/1509.02971. |
| 16 |
HUANGC Q,DONGK S,HUANGH Q,et al.Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization[J].Journal of Systems Engineering and Electronics,2018,29(1):86-97.
doi: 10.21629/JSEE.2018.01.09 |
| 17 | WALKER O, VANEGAS F, GONZALEZ F, et al. A deep reinforcement learning framework for UAV navigation in indoor environments[C]//Proc. of the IEEE Aerospace Confe-rence, 2019. |
| 18 | LEVINES,FINNC,DARRELLT,et al.End-to-end training of deep visuomotor policies[J].The Journal of Machine Learning Research,2016,17(1):1334-1373. |
| 19 | 张运涛. 面向无人机自主避障导航的深度强化学习算法研究[D]. 南京: 东南大学, 2021. |
| ZHANG Y T. Research on deep reinforcement learning for autonomous obstacle avoidance and navigation of UAV[D]. Nanjing: Southeast University, 2021. | |
| 20 |
WANK F,GAOX G,HUZ J,et al.Robust motion control for UAV in dynamic uncertain environments using deep reinforcement learning[J].Remote Sensing,2020,12(4):640-660.
doi: 10.3390/rs12040640 |
| 21 | ZHANGC M,ZHUY W,YANGL P,et al.An optimal gui-dance method for free-time orbital pursuit-evasion game[J].Journal of Systems Engineering and Electronics,2022,33(6):1294-1308. |
| 22 |
LIY F,SHIJ P,JIANGW,et al.Autonomous maneuver decision-making for a UCAV in short-range aerial combat based on an MS-DDQN algorithm[J].Defence Technology,2022,18(9):1697-1714.
doi: 10.1016/j.dt.2021.09.014 |
| 23 |
ZHANGH,JIAOZ X,SHANGY X,et al.Ground maneuver for front-wheel drive aircraft via deep reinforcement learning[J].Chinese Journal of Aeronautics,2021,34(10):166-176.
doi: 10.1016/j.cja.2021.03.029 |
| 24 | LIUQ,SHIL,SUNL L,et al.Path planning for UAV-mounted mobile edge computing with deep reinforcement learning[J].IEEE Trans.on Vehicular Technology,2020,69(3):5723-5728. |
| 25 | LIY H,WANGH L,WUT C,et al.Attitude control for hypersonic reentry vehicles: an efficient deep reinforcement learning method[J].Applied Soft Computing,2023,123(1):108865. |
| 26 | RUMMERY G A, NIRANJAN M. On-line Q-learning using connectionist systems[D]. Cambridge: University of Cambridge, 1994. |
| 27 |
王冠,茹海忠,张大力,等.弹性高超声速飞行器智能控制系统设计[J].系统工程与电子技术,2022,44(7):2276-2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
WANGG,RUH Z,ZHANGD L,et al.Design of intelligent control system for flexible hypersonic vehicle[J].Systems Engineering and Electronics,2022,44(7):2276-2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
| 28 | YANG Q M, ZHU Y, ZHANG J D, et al. UAV air combat autonomous maneuver decision based on DDPG algorithm[C]//Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 37-42. |
| 29 | NARVEKAR S, SINAPOV J, LEONETTI M, et al. Source task creation for curriculum learning[C]//Proc. of the ICAAMS 18th International Conference on Autonomous Agents & Multiagent Systems, 2016: 566-574. |
| 30 | DUW B,GUOT,CHENJ,et al.Cooperative pursuit of unauthorized UAVs in urban airspace via multi-agent reinforcement learning[J].Transportation Research Part C: Emerging Technologies,2021,128(1):103-122. |
| [1] | Tingyu ZHANG, Ying ZENG, Nan LI, Hongzhong HUANG. Spacecraft power-signal composite network optimization algorithm based on DRL [J]. Systems Engineering and Electronics, 2024, 46(9): 3060-3069. |
| [2] | Mengyu ZHANG, Yajie DOU, Ziyi CHEN, Jiang JIANG, Kewei YANG, Bingfeng GE. Review of deep reinforcement learning and its applications in military field [J]. Systems Engineering and Electronics, 2024, 46(4): 1297-1308. |
| [3] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [4] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [5] | Wenhai WU, Xiaofeng GUO, Siyu ZHOU. Path planning algorithm based on NURBS and GOBL-ACDE [J]. Systems Engineering and Electronics, 2020, 42(5): 1073-1082. |
| [6] | XIE Hao, GUO Aihuang, SONG Chunlin, JIAO Runze. eNB selection for LTE-V using deep reinforcement learning [J]. Systems Engineering and Electronics, 2019, 41(7): 1652-1657. |
| [7] | ZHANG Yan-xia, ZHANG An, SUN Hai-yang. Research on modeling and simulation of formation cooperation under air early warning command and guidance on the sea battles [J]. Systems Engineering and Electronics, 2016, 38(1): 90-95. |
| [8] | NI Tian-quan, WANG Jian-dong, LIU Yi-an. Application of particle swarm algorithm in route planning of UAV [J]. Journal of Systems Engineering and Electronics, 2011, 33(4): 806-810. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||