
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (2): 556-568.doi: 10.12305/j.issn.1001-506X.2026.02.17
• 系统工程 • 上一篇
魏建林1( ), 林彦超2, 唐慧龙1, 张旺1, 王伟1,*
), 林彦超2, 唐慧龙1, 张旺1, 王伟1,*
收稿日期:2024-10-24
修回日期:2025-02-21
出版日期:2025-05-20
发布日期:2025-05-20
通讯作者:
王伟
E-mail:18879161337@163.com
作者简介:魏建林(1999—),男,博士研究生,主要研究方向为雷达电子对抗基金资助:
Jianlin WEI1(), Yanchao LIN2, Huilong TANG1, Wang ZHANG1, Wei WANG1,*
Received:2024-10-24
Revised:2025-02-21
Online:2025-05-20
Published:2025-05-20
Contact:
Wei WANG
E-mail:18879161337@163.com
摘要:
在多无人机协同突防过程中,针对无人机需完成目标分配与探干侦动作选择的任务决策存在模型构建难,对模型求解方法复杂度高的问题,提出一种蒙特卡罗树搜索(Monte Carlo tree search, MCTS)的改进方法实现多无人机多任务联合决策。首先,考虑无人机与雷达对抗中的角度、距离等态势要素,以及当前无人机动作执行成功概率和雷达状态有效概率,构建多无人机目标分配与探干侦动作统一决策数学模型。其次,提出搜索次数自适应调整的改进MCTS算法对模型求解,实现大规模解空间在线快速寻优。仿真结果表明,改进算法使多雷达系统对无人机的威胁程度下降约16.8%,相比多臂赌博机算法效果提升约5.08%,决策时间约0.23 s,比传统MCTS缩短约45.7%,有助于提升无人机战场生存率。
中图分类号:
魏建林, 林彦超, 唐慧龙, 张旺, 王伟. 基于改进MCTS的多无人机多任务联合决策[J]. 系统工程与电子技术, 2026, 48(2): 556-568.
Jianlin WEI, Yanchao LIN, Huilong TANG, Wang ZHANG, Wei WANG. Multi-UAV multi-mission joint decision making based on improved MCTS[J]. Systems Engineering and Electronics, 2026, 48(2): 556-568.
表1
红蓝双方场景设置"
| 对抗双方 | 数量 | 动作 |
| 红方多无人机 | 探测 | |
| 干扰 | ||
| 侦察 | ||
| 蓝方多雷达 | 搜索 | |
| 确认 | ||
| 跟踪 | ||
| 识别 | ||
| 干扰 |
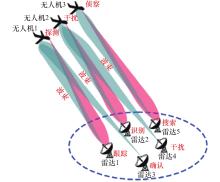
图1
多无人机突防多雷达场景图"
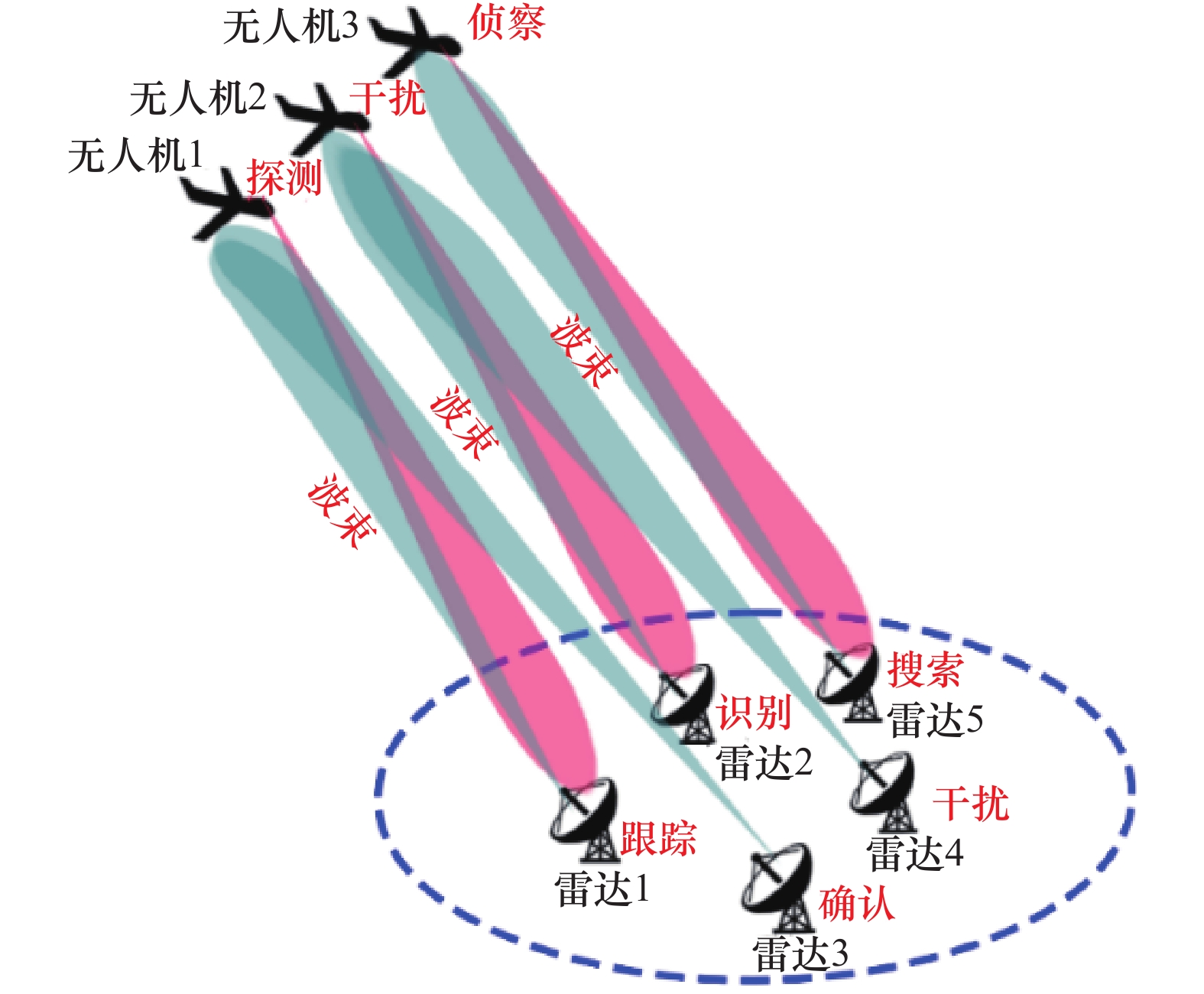
表2
蓝方雷达状态有效概率"
| 影响因素 | 状态有效概率 |
| 搜索 | |
| 确认 | |
| 跟踪 | |
| 识别 | |
| 干扰 |
表3
红方执行动作成功概率"
| 决策动作 | 动作执行成功概率 |
| 探测 | |
| 干扰 | |
| 侦察 |
图2
算法剪枝过程示意图"

图3
MCTS_AT算法框架"
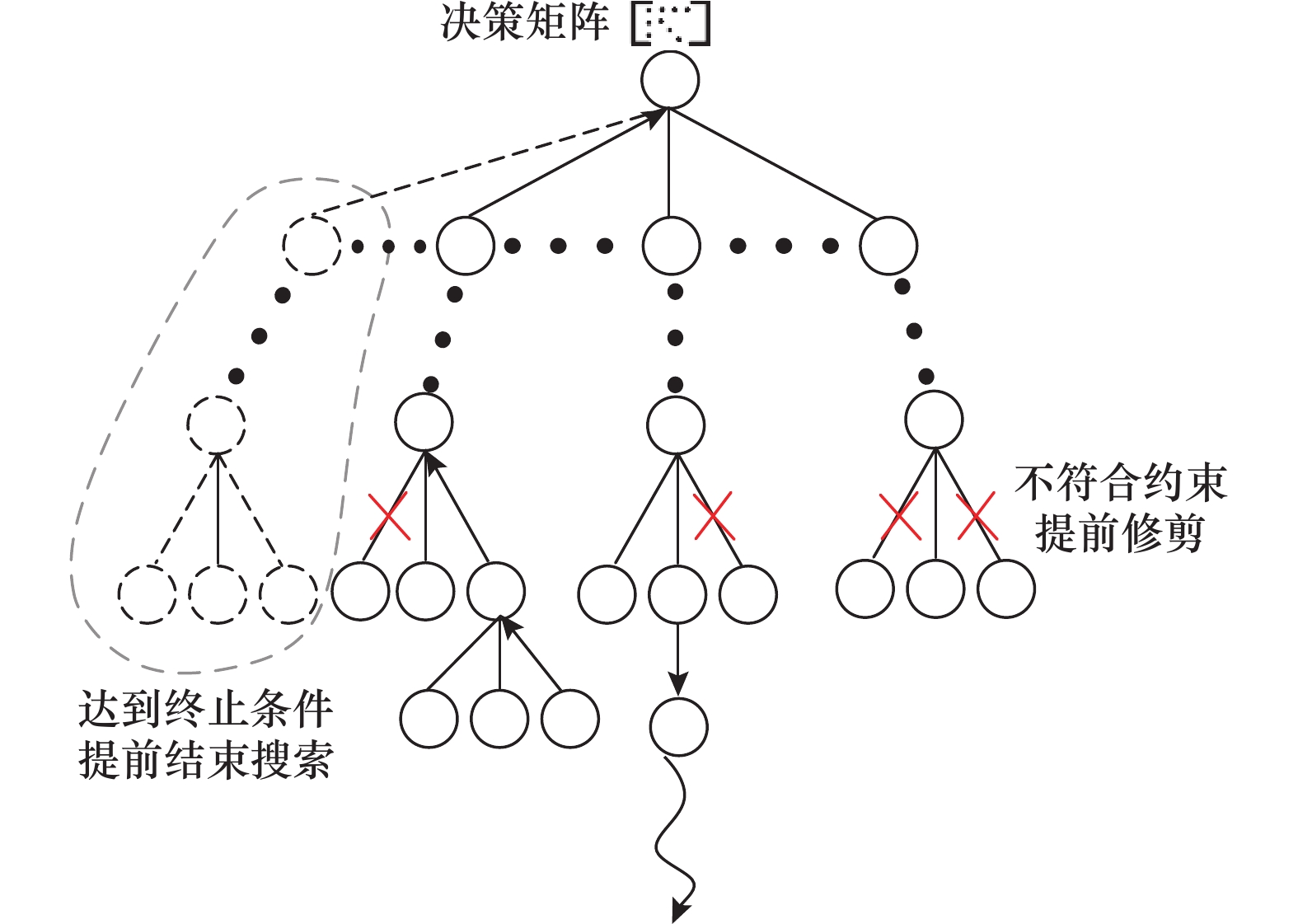

图4
MCTS_AT算法流程图"
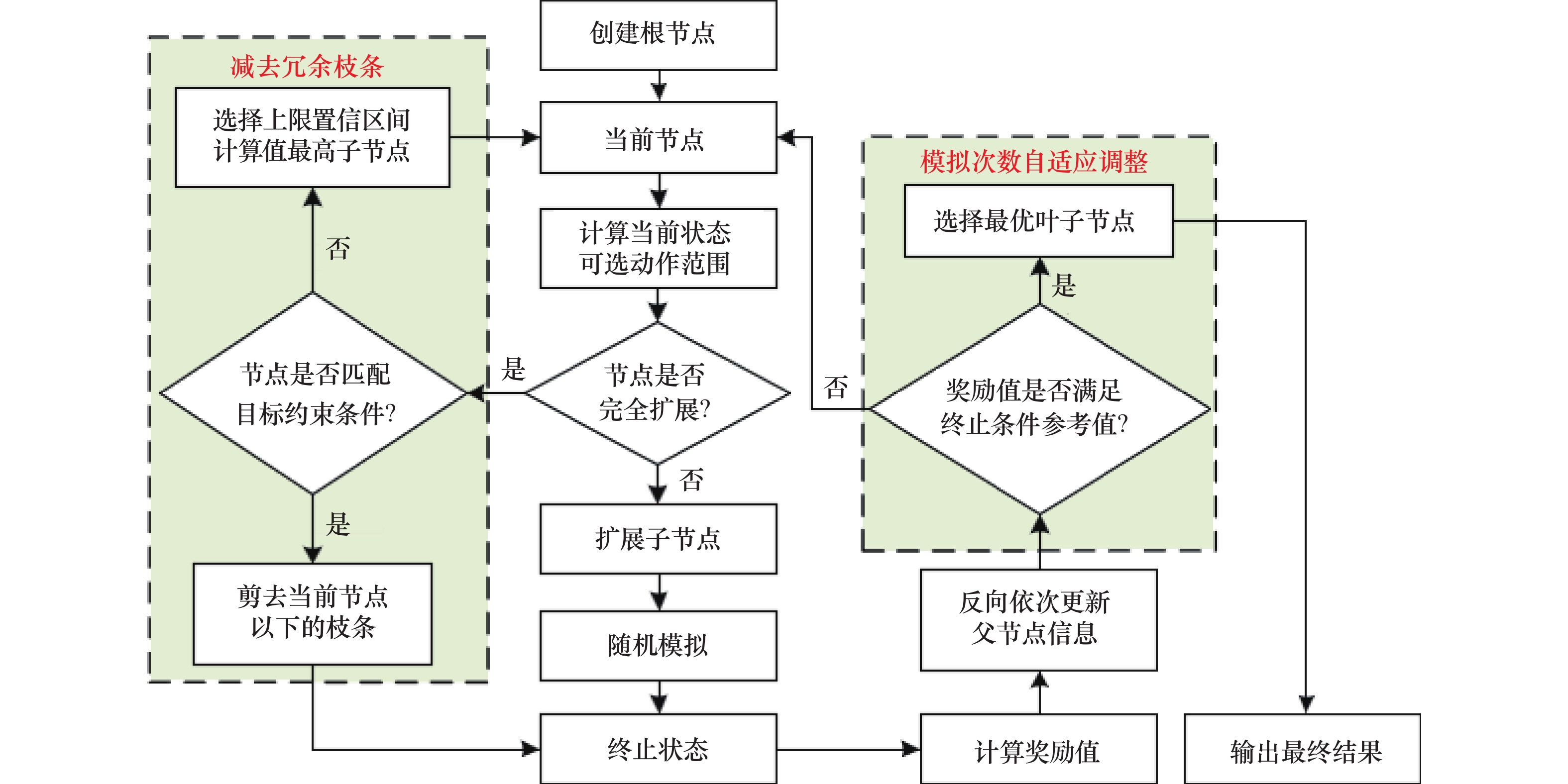
表4
蓝方雷达态势信息"
| 序号 | 类型 | 雷达状态 | X轴位置/km | Y轴位置/km |
| 1 | 1 | 2 | −496.07 | 13.92 |
| 2 | 1 | 3 | −497.57 | 32.41 |
| 3 | 1 | 3 | −468.87 | 1.13 |
| 4 | 1 | 2 | −469.67 | 20.31 |
| 5 | 1 | −1 | −469.56 | 40.44 |
表5
红方无人机态势信息"
| 序号 | X轴位置/km | Y轴位置/km | Z轴位置/km | 速度/(km/s) |
| 1 | −594.51 | 11.53 | 31.46 | 1.60 |
| 2 | −594.44 | 21.61 | 31.56 | 1.60 |
| 3 | −595.13 | 30.93 | 30.86 | 1.60 |
表6
蓝方雷达目标分配状态"
| 序号 | 当前时刻无人机序号 |
| 1 | 1 |
| 2 | 2 |
| 3 | 3 |
| 4 | 1 |
| 5 | 2 |
表7
雷达探测下工作参数"
| 参数 | 数值 | 参数 | 数值 | |
| 发射功率 | 600×106 | 虚警概率 | 1e-6 | |
| 发射天线增益 | 16 | 工作波长 | 0.2 | |
| 天线波瓣宽度 | 2 | 系统损耗 | 3 | |
| 非相干累计脉冲数I | 12 | 脉冲宽度 | 10 |
表8
雷达干扰下工作参数"
| 参数 | 数值 | 参数 | 数值 | |
| 干扰功率 | 100 | 系统损耗 | 2 | |
| 天线增益 | 10 | 工作波长 | 0.2 |
表9
场景仿真参数设置"
| 参数 | 数值 | 参数 | 数值 | |
| 距离测量误差最大值 | 0.10 | 速度测量误差 最大值 | 0.02 | |
| 角度测量误差最大值 | 0.80 | MCTS次数 | 500 | |
| 0.55 | 1/3 | |||
| 探索因子c | 0.45 |
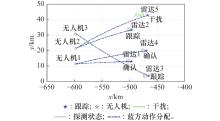
图5
对抗场景"

图6
决策输出结果矩阵"

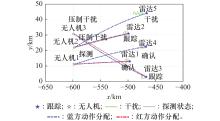
图7
红方决策动作对抗场景"
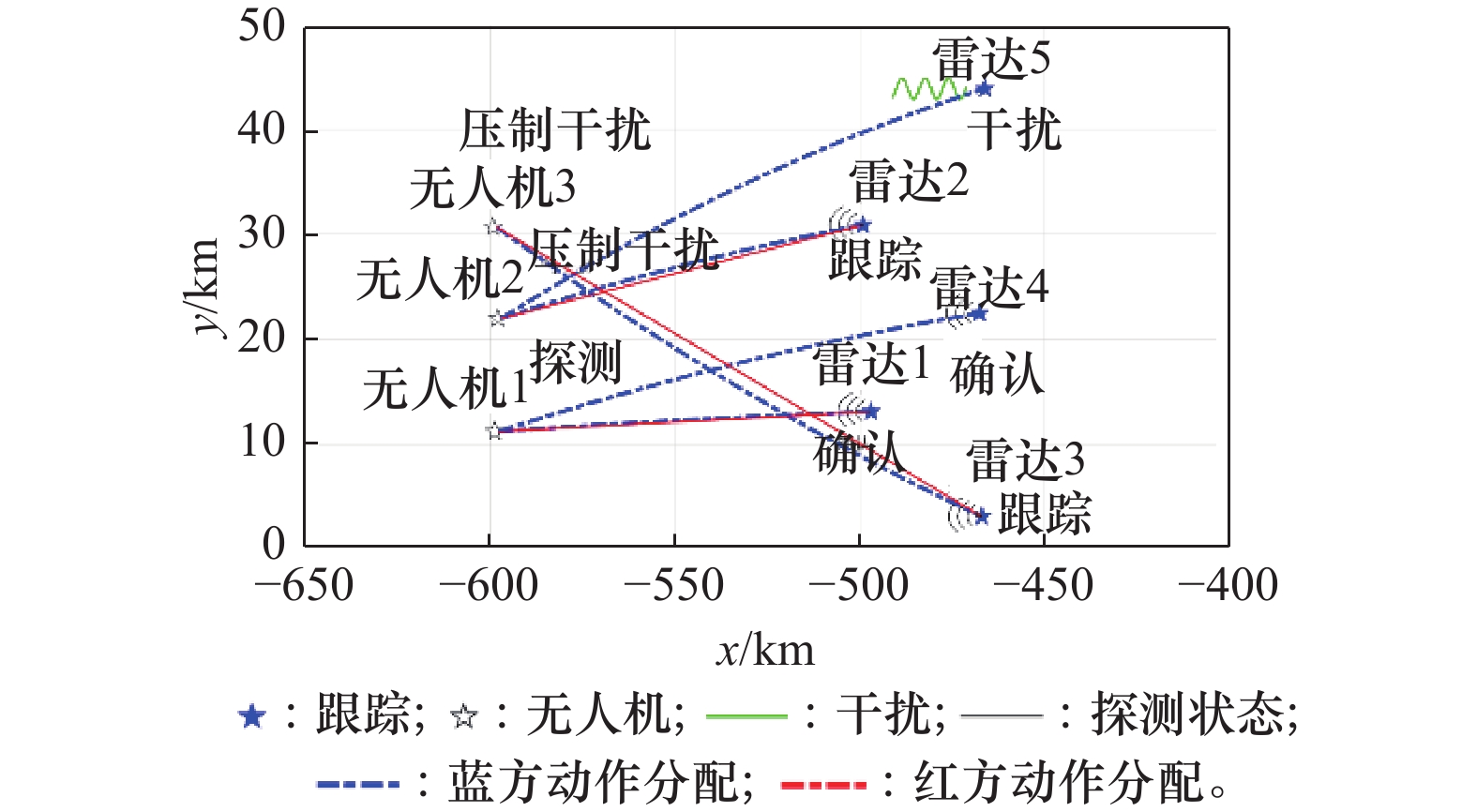
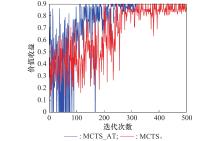
图8
目标函数收益曲线变化对比"
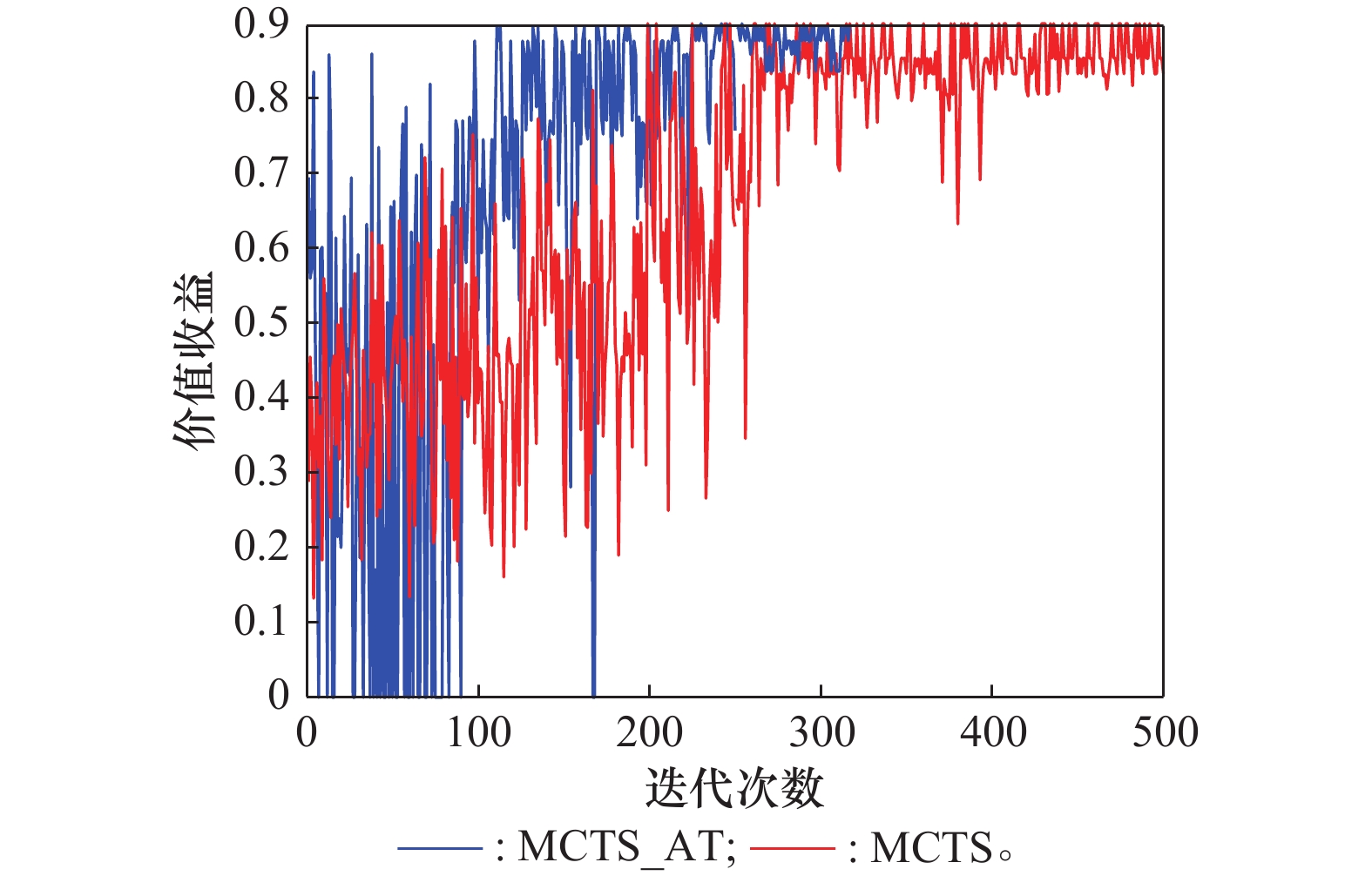
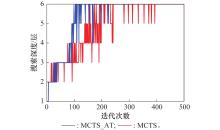
图9
MCTS和MCTS_AT搜索树深度"
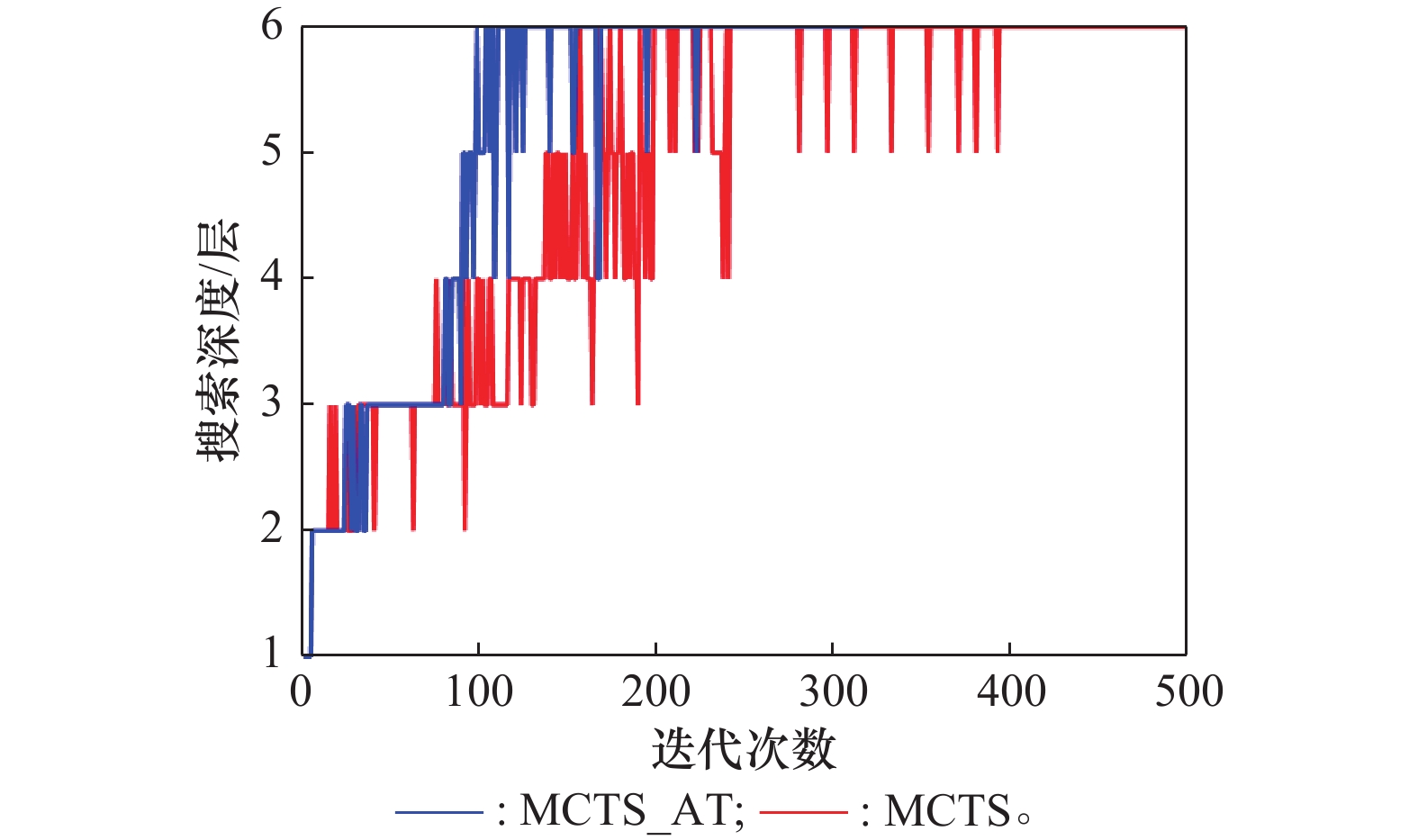
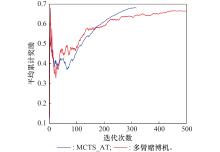
图10
多臂赌博机和MCTS_AT算法对比"
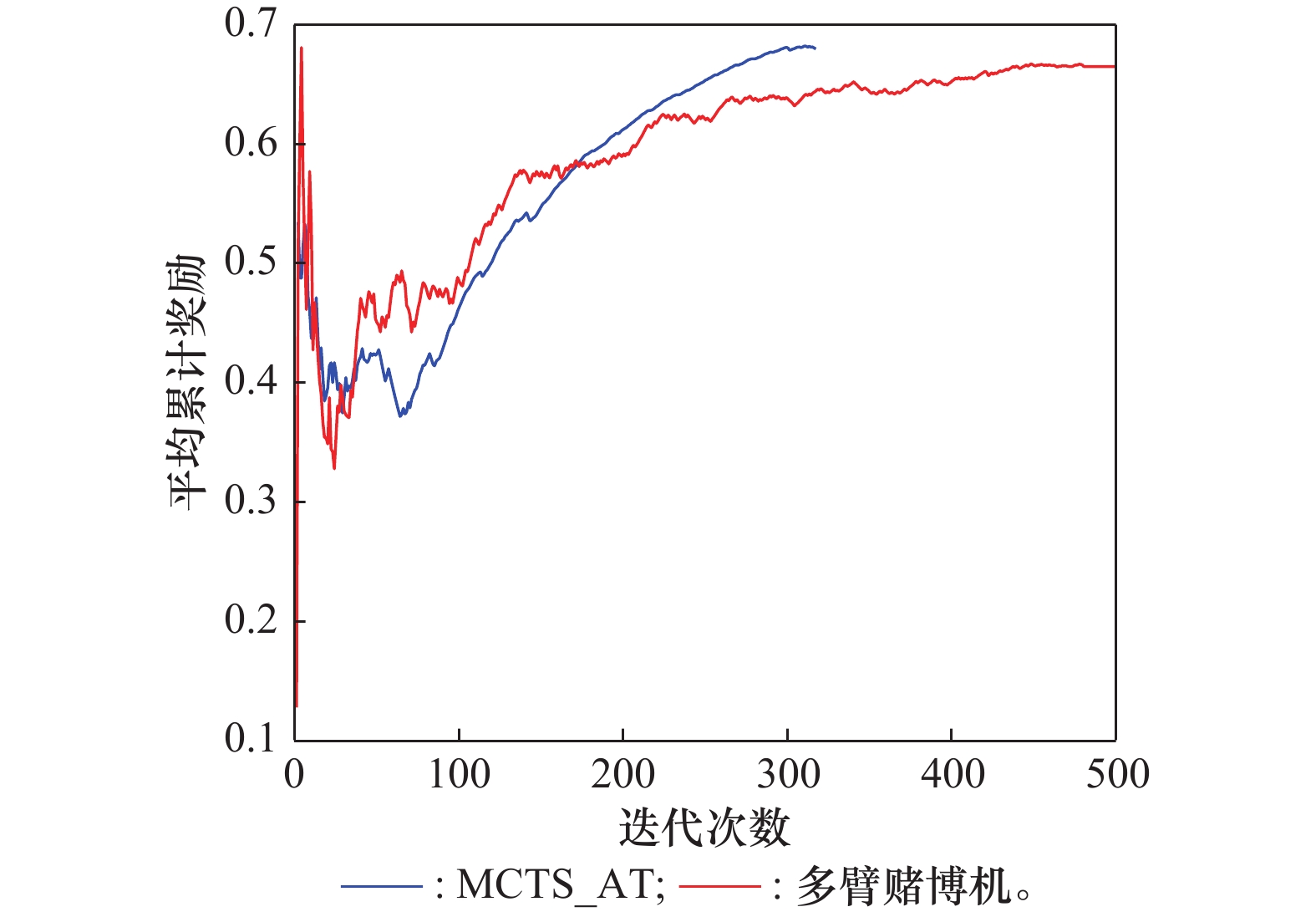
表10
蓝方雷达整体威胁程度"
| 蓝方雷达整体威胁程度 | 红方无人机决策方法 | |
| MCTS_AT算法 | 多臂赌博机算法 | |
| 0 | 0.75 | 0.75 |
| 1 | 0.56 | 0.59 |
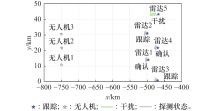
图11
初始场景状态"
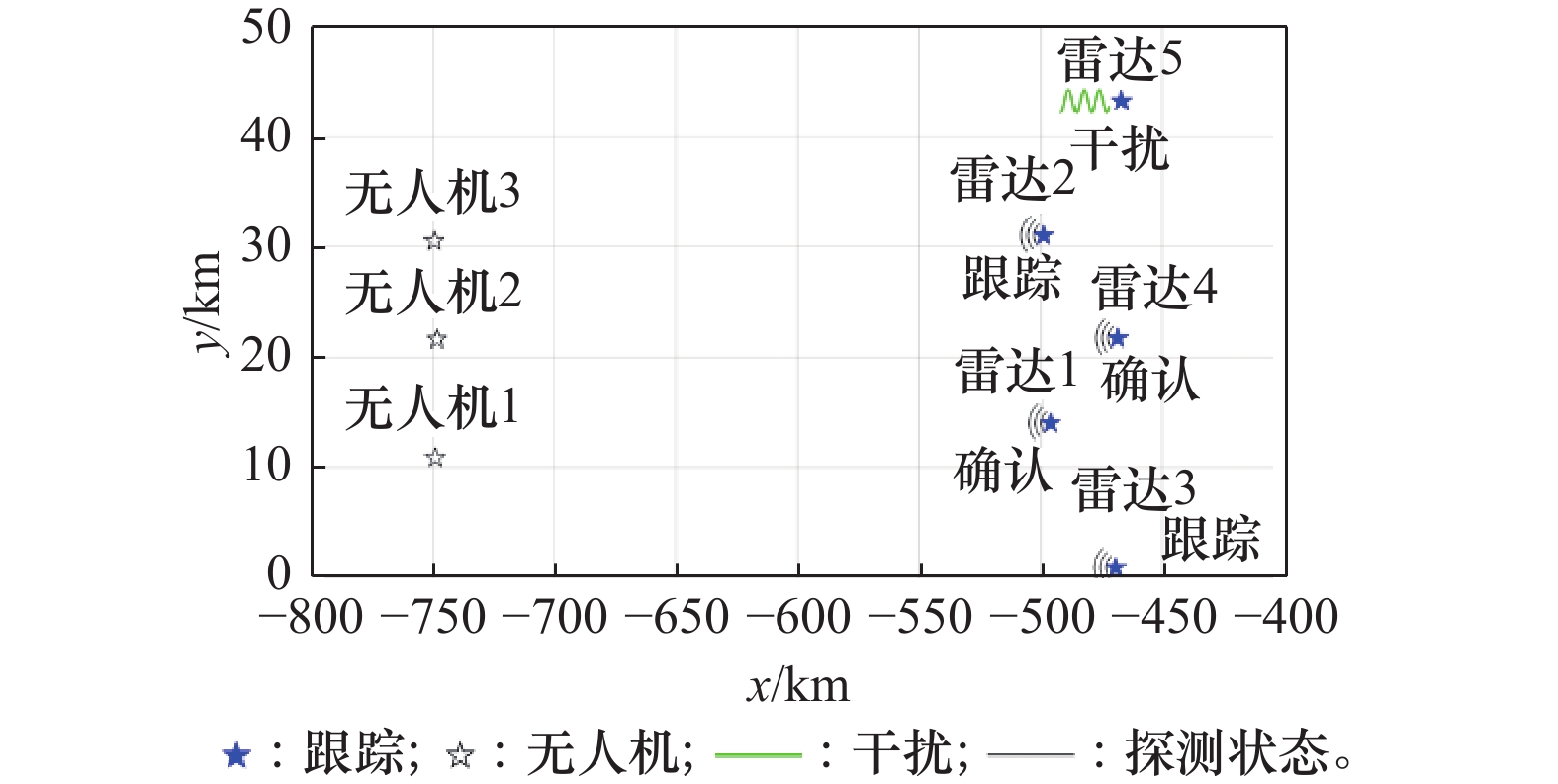
图12
仿真过程中无人机执行动作变化"
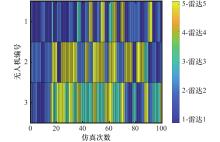
图13
无人机目标分配变化"
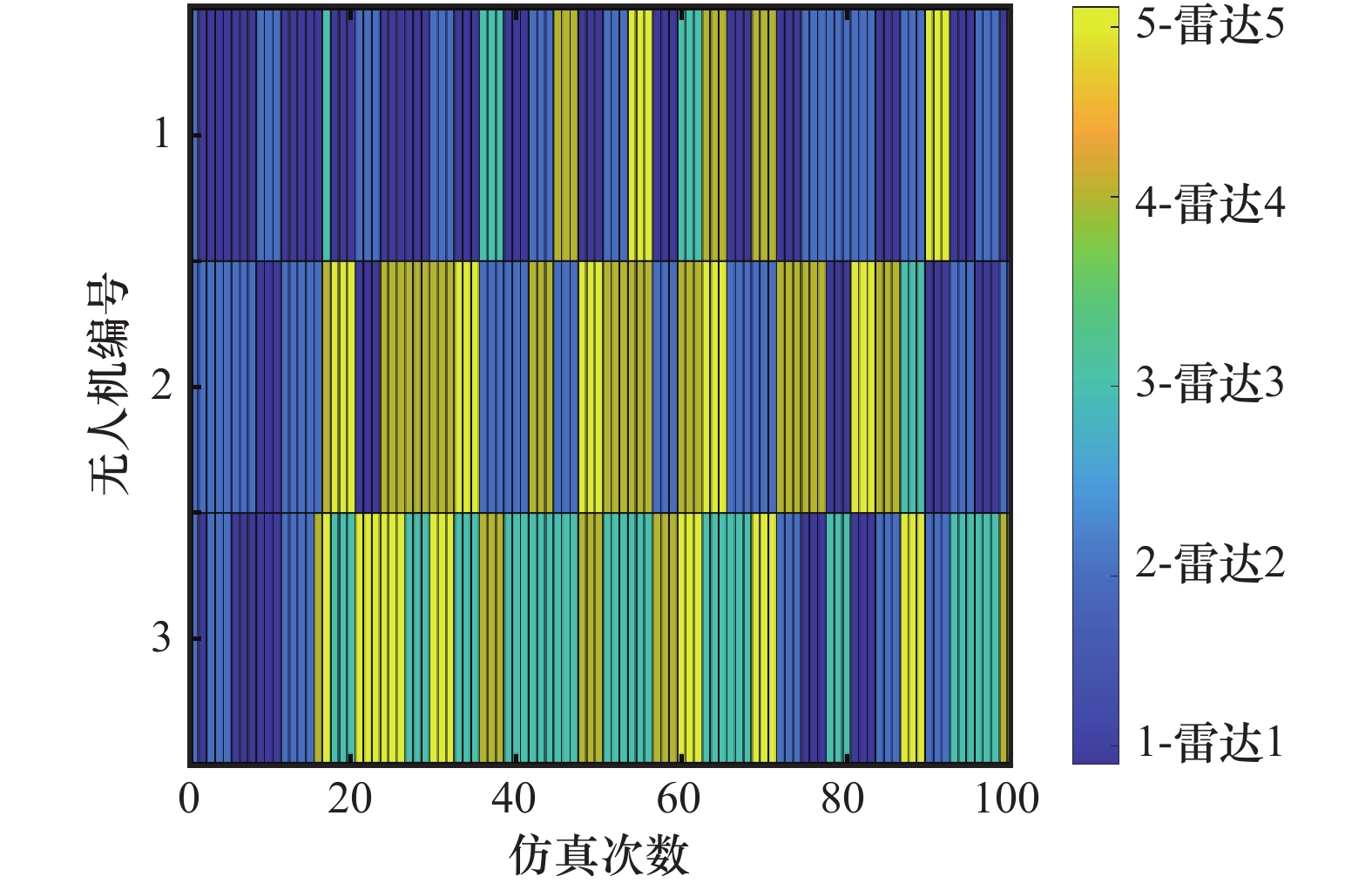
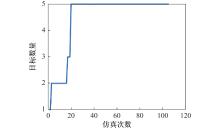
图14
无人机检测雷达数量变化"
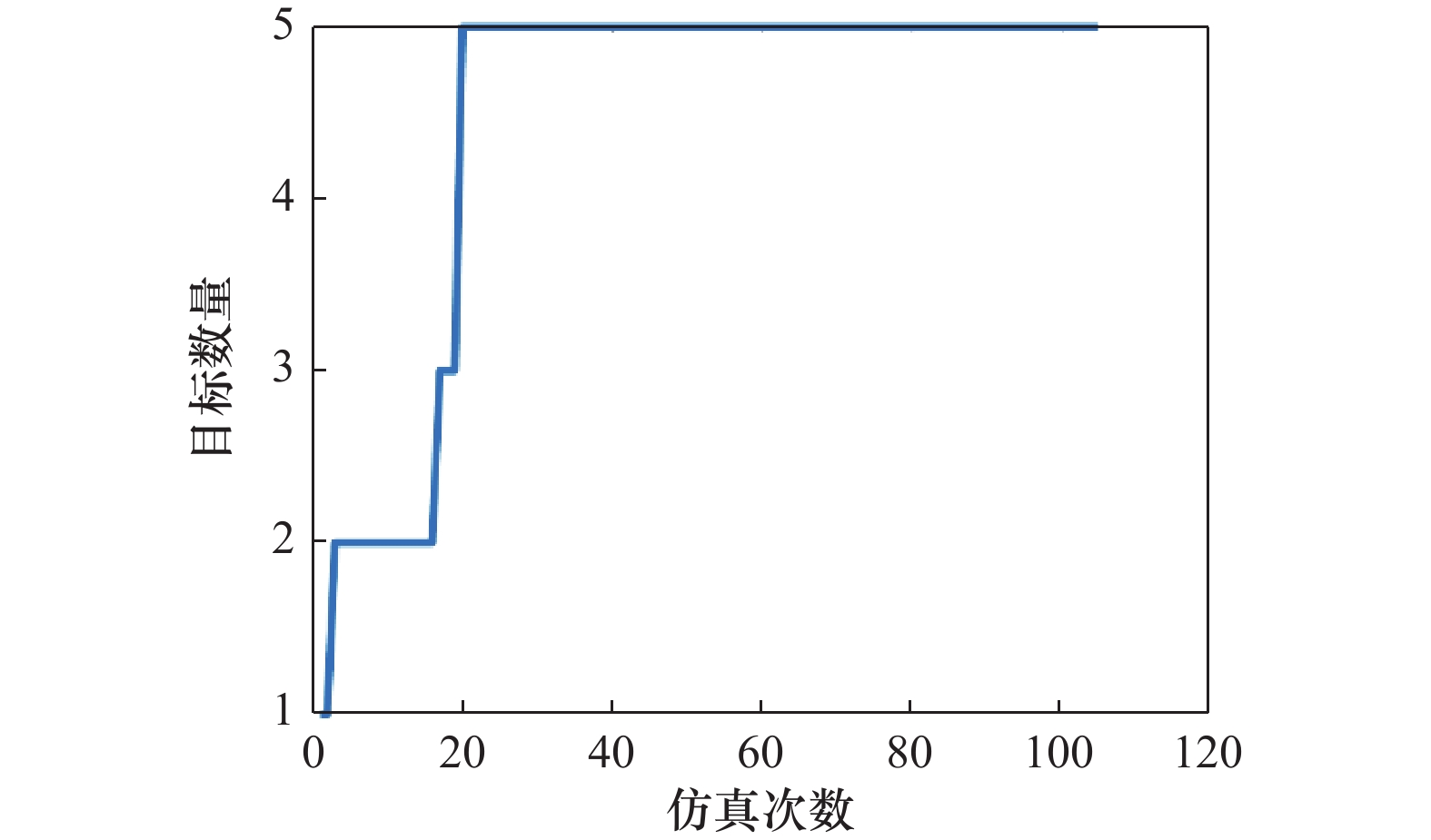
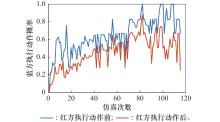
图15
仿真过程中蓝方整体威胁程度变化"
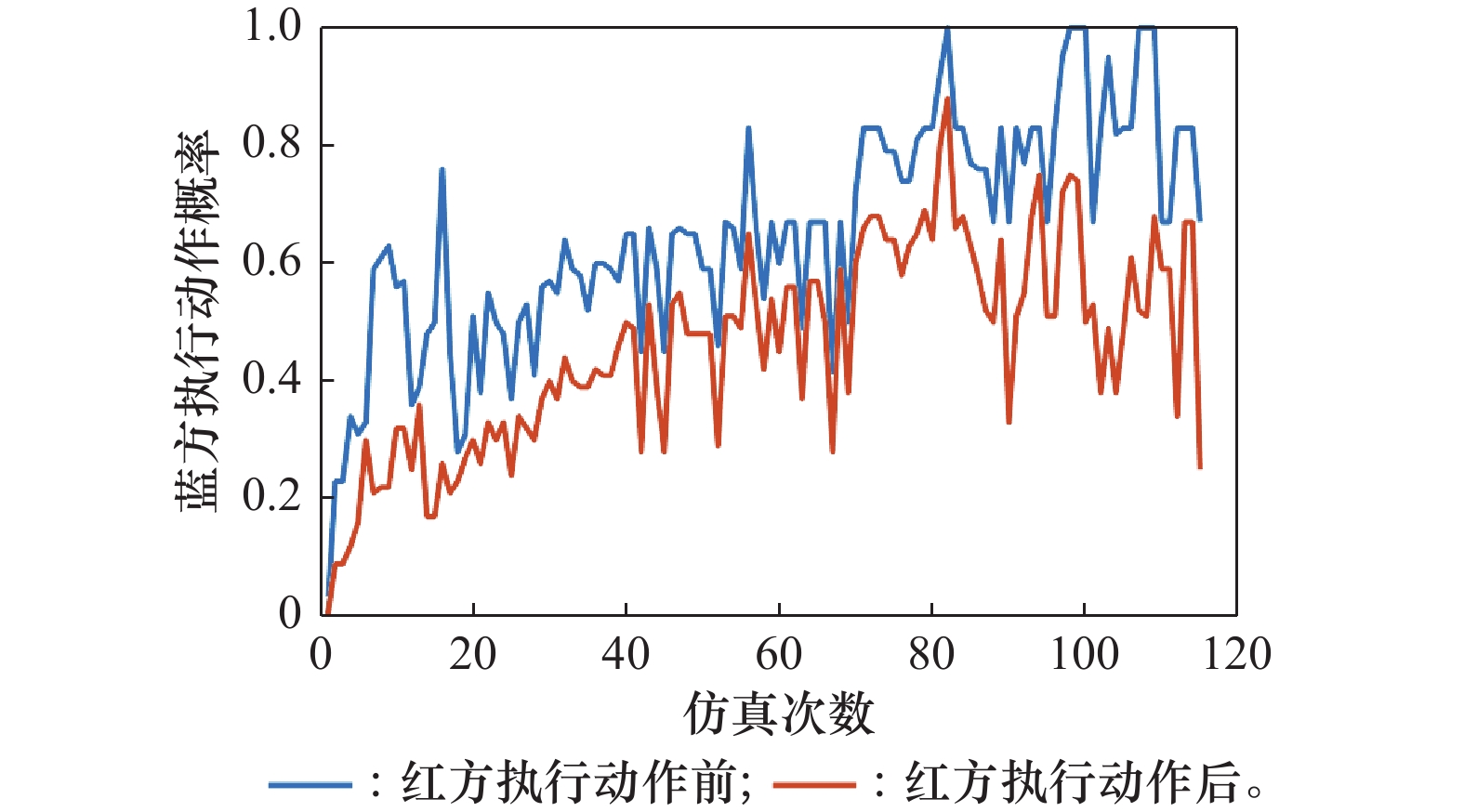
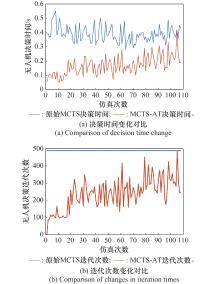
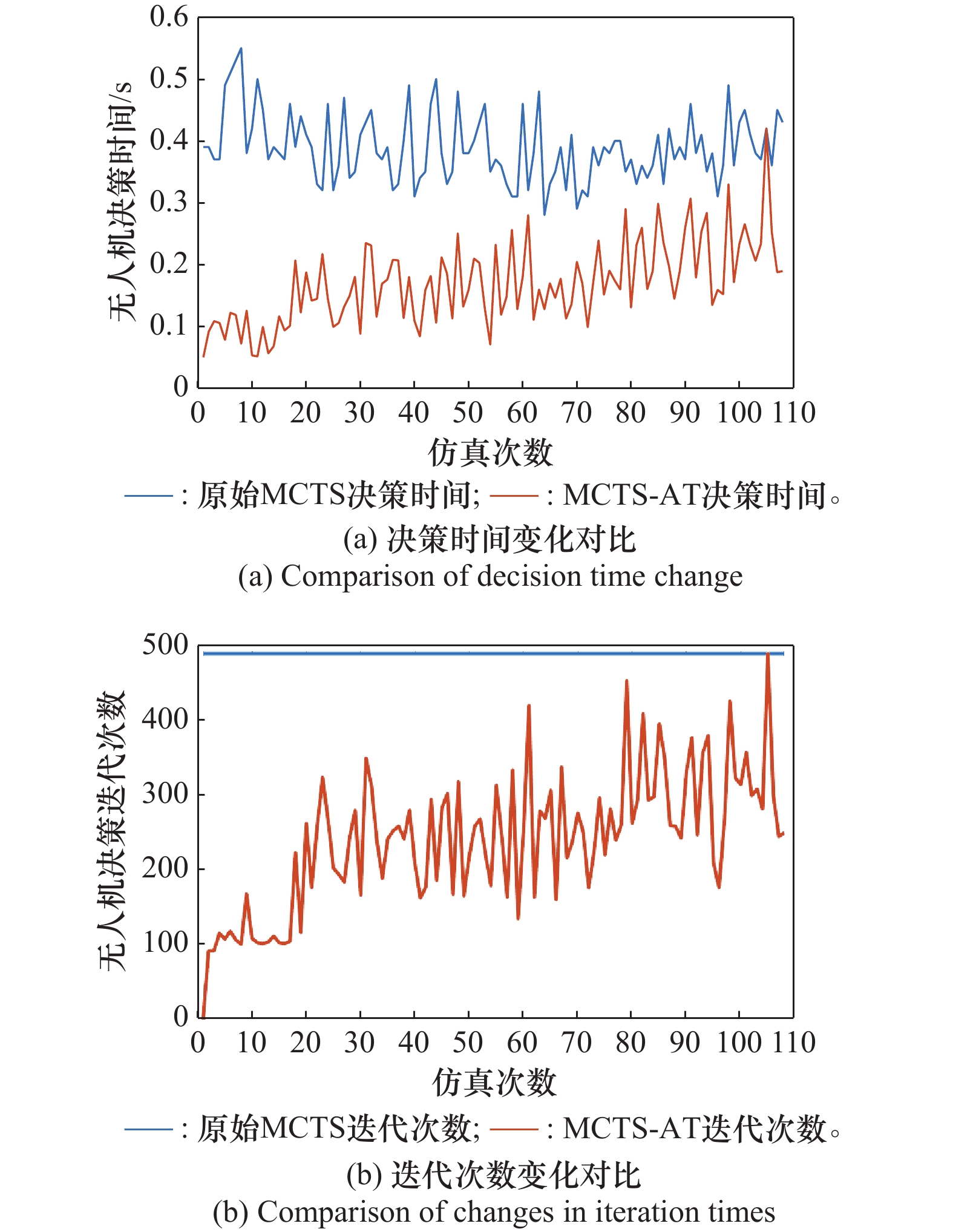
图16
算法性能对比"
| 1 | 刘钢, 汤俊, 刘陈, et al. 无人飞行器集群协同行为建模技术综述[J]. 系统工程与电子技术, 2021, 43 (8): 2221- 2231. |
| LIU G, TANG J, LIU C, et al. Survey of cooperative behavior modeling technology for unma-nned aerial vehicles cluster[J]. Systems Engineering and Electronics, 2021, 43 (8): 2221- 2231. | |
| 2 | 王建峰, 贾高伟, 郭正, 等. 多无人机协同任务规划方法研究综述[J]. 系统工程与电子技术, 2024, 46 (10): 3437−3450. |
| WANG J F, JIA G W, GUO Z, Research status and development of multi-UAV system mission planning [J]. Systems Engineering and Electronics, 2024, 46 (10): 3437−3450. | |
| 3 |
TAN Y F, ZHOU C, QIAN F. Cooperative task allocation method for multi-unmanned aerial vehicles based on the modified genetic algorithm[J]. IET Intelligent Transport Systems, 2024, 18 (6): 1164- 1173.
doi: 10.1049/itr2.12495 |
| 4 |
GHAURI S A, SARFRAZ M, QAMAR R A, et al. A review of multi-UAV task allocation algorithms for a search and rescue scenario[J]. Journal of Sensor and Actuator Networks, 2024, 13 (5): 47.
doi: 10.3390/jsan13050047 |
| 5 |
FAN B Y, BO Y M. Learning improvement heuristics for multi-unmanned aerial vehicle task allocation[J]. Drones, 2024, 8 (11): 636.
doi: 10.3390/drones8110636 |
| 6 |
ZHANG J D, YANG Q M, SHI G Q, et al. UAV cooperative air combat maneuver decision based on multi-agent reinforcement learning[J]. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1421- 1438.
doi: 10.23919/JSEE.2021.000121 |
| 7 |
WANG J F, JIA G W, LIN J C, et al. Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm[J]. Journal of Central South University, 2020, 27 (2): 432- 448.
doi: 10.1007/s11771-020-4307-0 |
| 8 | WANG G, LV X, CUI L Z, et al. The methods of task pre-allocation and reallocation for multi-UAV cooperative reconnaissance mission[J]. IET Collaborative Intelligent Manufacturing, 2023, 5 (4) |
| 9 | 熊韫文, 魏才盛, 许丹, 等. 基于改进蒙特卡洛树搜索的无人机目标分配与突防决策方法 [J]. 中南大学学报(自然科学版), 2023, 54(8): 3132−3144. |
| XIONG Y W, WEI C S, XU D, et al. Multi-UVA target allocation and penetration decision based on an improved Monte Carlo tree search method [J]. Journal of Central South University (Science and Technology), 2023, 54(8): 3132−3144. | |
| 10 | 文永明, 石晓荣, 黄雪梅, 等. 一种无人机集群对抗多耦合任务智能决策方法 [J]. 宇航学报, 2021, 42(4): 504−512. |
| WEN Y M, SHI X R, HUANG X M, et al. An intelligent decision-making method for multi-coupling tasks of UAV cluster countermeasure [J]. Journal of Astronautics, 2021, 42(4): 504−512. | |
| 11 | MAO X, WU G H, FAN M F, et al. DL-DRL: A double-level deep reinforcement learning approach for large-scale task scheduling of multi-UAV[J]. IEEE Trans. on Automation Science and Engineering, 2024, 22, 1028- 1044. |
| 12 | CHEN W K, HAI X S, HU Y M, et al. Hierarchical decision-making framework for multi-UAV task assignment via enhanced pigeon-inspired optimization[J]. Guidance, Navigation and Control, 2023, 3 (4): 2350028. |
| 13 |
LUONG P, GAGNON F, TRAN L N, et al. Deep reinforcement learning-based resource allocation in cooperative uav-assisted wireless networks[J]. IEEE Trans. on Wireless Communications, 2021, 20 (11): 7610- 7625.
doi: 10.1109/TWC.2021.3086503 |
| 14 |
LIANG Z B, LI Q, FU G D. Multi-UAV collaborative search and attack mission decision-making in unknown environments[J]. Sensors, 2023, 23 (17)
doi: 10.1109/JSEN.2023.3306185 |
| 15 | 邹子缘, 陈琪锋. 基于决策树搜索的空间飞行器集群对抗目标分配方法[J]. 航空学报, 2022, 43 (S1): 78- 88. |
| ZOU Z Y, CHEN Q F. Decision tree-based target assignment for confrontation of multiple space vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (S1): 78- 88. | |
| 16 | 郑红星, 郭继峰, 谢旭东, 等. 一种未知动态环境下异构无人机集群分布式联盟形成方法[J]. 宇航学报, 2022, 43 (2): 189- 197. |
| ZHENG H X, GUO J F, XIE X D, et al. A distributed coalition formation method of heterogeneous UAV swarm in unknown dynamic environment[J]. Journal of Astronautics, 2022, 43 (2): 189- 197. | |
| 17 |
BROWNE C B, POWLEY E, WHITEHOUSE D, et al. A survey of Monte Carlo tree search methods[J]. IEEE Trans. on Computational Intelligence and AI in Games, 2012, 4 (1): 1- 43.
doi: 10.1109/TCIAIG.2012.2186810 |
| 18 |
HOFFMAN M, SONG E, BRUNDAGE M P, et al. Online improvement of condition-based maintenance policy via Monte Carlo tree search[J]. IEEE Trans. on Automation Science and Engineering, 2022, 19 (3): 2540- 2551.
doi: 10.1109/TASE.2021.3088603 |
| 19 |
LIU Z C, HAO M R. Heterogeneous unmanned aerial vehicles cooperative search approach for complex environments[J]. Engineering Applications of Artificial Intelligence, 2024, 138, 109384.
doi: 10.1016/j.engappai.2024.109384 |
| 20 |
CHEN T Y, MIAO Z H, LI W M, et al. A learning-based memetic algorithm for a cooperative task allocation problem of multiple unmanned aerial vehicles in smart agriculture[J]. Swarm and Evolutionary Computation, 2024, 91, 101694.
doi: 10.1016/j.swevo.2024.101694 |
| 21 | CHOUR K, PRADEEP P, MUNISHKIN A A, et al. Aerial vehicle routing and scheduling for UAS traffic management: a hybrid Monte Carlo tree search approach [C]// Proc. of the IEEE/AIAA 42nd Digital avionics Systems Conference, 2023. |
| 22 | LI Y Y, CHEN W Y, LIU S K, et al. Multi-UAV cooperative air combat target assignment method based on VNS-IBPSO in complex dynamic environment[J]. International Journal oF Aerospace Engineering, 2024 (1): 9980746. |
| 23 | 张嘉辉, 蒙志君, 何家政, 等. 基于改进能量谷优化的多无人机空战目标分配[J]. 系统工程与电子技术, 2024, 46 (11): 3754- 3763. |
| ZHANG J H, MENG Z J, HE J Z, et al. Multi-UAV air combat target allocation based on improved energy valley optimization[J]. Systems Engineering and Electronics, 2024, 46 (11): 3754- 3763. | |
| 24 | XING H X, XING Q H, WANG K. A joint allocation method of multi-jammer cooperative jamming resources based on suppression effectiveness[J]. Mathematics, 2023, 11 (4): 1- 25. |
| 25 |
LU D J, WANG X, WU X T, et al. Adaptive allocation strategy for cooperatively jamming netted radar system based on improved cuckoo search algorithm[J]. Defence Technology, 2023, 24, 285- 297.
doi: 10.1016/j.dt.2022.04.013 |
| 26 | ZHANG D L, SUN J, YI W, et al. Joint jamming beam and power scheduling for suppressing netted radar system [C]// Proc. of the IEEE Radar Conference, 2021. |
| 27 | 李世忠, 王国宏, 吴巍, 等. 分布式干扰下组网雷达目标检测与跟踪技术[J]. 系统工程与电子技术, 2012, 34(4): 782−788. |
| LI S Z, WANG G H, WU W, et al. Detect and tracking technique for radar network in the presence of distributed jamming. Systems Engineering and Electronics, 2012, 34(4): 782−788. | |
| 28 | 陆德江, 王星, 陈游, 等. 联合多种资源协同干扰组网雷达系统的自适应调度方法[J]. 系统工程与电子技术, 2023, 45(9): 2744−2754. |
| LU D J, WANG X, CHEN Y, et al. Adaptive scheduling method of joint multi-resource for cooperative interference of networked radar system, 2023, 45(9): 2744−2754. | |
| 29 | WANG C, JIU B, PU W Q, et al. Anti-jamming equilibrium strategy learning of frequency agile radar based on Monte Carlo tree search [C]// Proc. of the IEEE International Radar Conference, 2023. |
| 30 |
, et al. Model checking for probabilistic multiagent systems[J]. Journal of Computer Science and Technology, 2023, 38 (5): 1162- 1186.
doi: 10.1007/s11390-022-1218-6 |
| 31 | 罗俊仁, 张万鹏, 陆丽娜, 等. 即时策略博弈在线对抗规划方法综述[J]. 计算机科学, 2022, 49(6): 287−296. |
| LUO J R, ZHANG W P, LU L N, et al. Survey on online adversarial planning for real-time strategy game[J]. Computer Science, 2022, 49(6): 287−296. | |
| 32 | CHENG X T, MAGHSUDI S. Distributed consensus algorithm for decision-making in multi-agent multi-armed bandit[J]. IEEE Trans. on Control of Network Systems, 2024, E107A(5): 799−805. |
| [1] | 洪芳宇, 叶青, 张利宁, 伍国华. 面向区域搜索的车载多无人机协同任务规划方法[J]. 系统工程与电子技术, 2026, 48(1): 144-156. |
| [2] | 李正杰, 刘光远, 张浩为, 刘斌, 齐铖. 面向射频隐身的多无人机协同区域覆盖航迹优化方法[J]. 系统工程与电子技术, 2026, 48(1): 301-311. |
| [3] | 赵在强, 杨召, 杨添琦. 基于目标分配的多弹协同分层拦截制导策略[J]. 系统工程与电子技术, 2025, 47(5): 1671-1679. |
| [4] | 隆雨佟, 陈爱国, 史红权, 曾黎. 基于改进差分进化算法的跨平台武器目标分配方法[J]. 系统工程与电子技术, 2024, 46(3): 953-962. |
| [5] | 吕娜, 王茂桓, 钟元芾, 张英朝, 孙蕾. 二分图匹配模型下的武器目标分配问题[J]. 系统工程与电子技术, 2024, 46(2): 549-560. |
| [6] | 张嘉辉, 蒙志君, 何家政, 王子琛, 林尤深. 基于改进能量谷优化的多无人机空战目标分配[J]. 系统工程与电子技术, 2024, 46(11): 3754-3763. |
| [7] | 马悦, 吴琳, 许霄. 基于多智能体强化学习的协同目标分配[J]. 系统工程与电子技术, 2023, 45(9): 2793-2801. |
| [8] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [9] | 李梦杰, 常雪凝, 石建迈, 陈超, 黄金才, 刘忠. 武器目标分配问题研究进展: 模型、算法与应用[J]. 系统工程与电子技术, 2023, 45(4): 1049-1071. |
| [10] | 常雪凝, 石建迈, 陈超, 黄金才. 基于匈牙利-模拟退火算法的多阶段武器目标分配方法[J]. 系统工程与电子技术, 2023, 45(11): 3516-3523. |
| [11] | 朱晓雯, 范成礼, 卢盈齐, 朱文正, 吴暄. 基于改进BBO算法和模糊期望效果的反导武器目标分配建模与实现[J]. 系统工程与电子技术, 2023, 45(11): 3544-3554. |
| [12] | 李洪瑶, 李小强, 韩心中, 谢学立, 席建祥. 基于决策融合的多无人机协同目标检测识别算法[J]. 系统工程与电子技术, 2022, 44(3): 746-754. |
| [13] | 董晨, 帅逸仙, 周金鹏, 赖鹏, 程仙垒. 网络化多传感器-多武器协同防空任务规划[J]. 系统工程与电子技术, 2022, 44(12): 3738-3746. |
| [14] | 吴文海, 郭晓峰, 周思羽, 高丽. 改进差分进化算法求解武器目标分配问题[J]. 系统工程与电子技术, 2021, 43(4): 1012-1021. |
| [15] | 余敏建, 嵇慧明, 韩其松, 毕伟. 基于合作协同进化的多机空战目标分配[J]. 系统工程与电子技术, 2020, 42(6): 1290-1300. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||