
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (12): 3738-3746.doi: 10.12305/j.issn.1001-506X.2022.12.18
董晨1, 帅逸仙1, 周金鹏1, 赖鹏1, 程仙垒2,*
收稿日期:2021-06-18
出版日期:2022-11-14
发布日期:2022-11-24
通讯作者:
程仙垒
作者简介:董晨 (1986—), 男, 高级工程师, 博士, 主要研究方向为装备体系设计技术、任务规划技术|帅逸仙 (1994—), 男, 工程师, 硕士, 主要研究方向为装备体系设计技术、任务规划技术|周金鹏 (1989—), 男, 高级工程师, 硕士, 主要研究方向为指挥控制系统建模与仿真技术|赖鹏 (1987—), 男, 高级工程师, 硕士, 主要研究方向为体系对抗仿真技术|程仙垒 (1990—), 男, 助理研究员, 博士, 主要研究方向为装备体系评估技术、装备体系论证研究
基金资助:Chen DONG1, Yixian SHUAI1, Jinpeng ZHOU1, Peng LAI1, Xianlei CHENG2,*
Received:2021-06-18
Online:2022-11-14
Published:2022-11-24
Contact:
Xianlei CHENG
摘要:
针对网络化防空体系的多传感器-多武器协同任务规划问题, 考虑任务要求、装备性能、运用限制等约束, 构建多武器拦截与多传感器跟踪任务规划模型。前者以拦截时机、次数等为优化目标, 输出武器-目标配对以及对目标的拦截时段、跟踪时间要求; 后者以满足跟踪时间要求为目标, 输出传感器-目标配对和对目标的跟踪时段。设计了基于时段优选拼接和分支定界法的多传感器-多武器协同任务规划算法, 生成多传感器-多武器协同交战计划, 支持多传感器接力跟踪、跨平台打击引导、多武器协同抗击。在假定的舰艇编队与预警机协同防空场景下验证了所设计模型的有效性。
中图分类号:
董晨, 帅逸仙, 周金鹏, 赖鹏, 程仙垒. 网络化多传感器-多武器协同防空任务规划[J]. 系统工程与电子技术, 2022, 44(12): 3738-3746.
Chen DONG, Yixian SHUAI, Jinpeng ZHOU, Peng LAI, Xianlei CHENG. Cooperative air defense task planning of networked multi-sensor-multi-weapon[J]. Systems Engineering and Electronics, 2022, 44(12): 3738-3746.
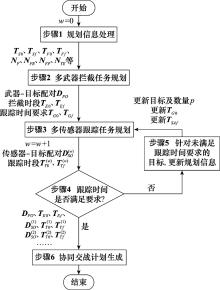
图1
算法流程图"
表1
场景1作战平台、传感器、武器的编号"
| 作战平台 | 平台武器 | 平台传感器 |
| 驱逐舰1 | W1 | 静默 |
| 驱逐舰2 | W2 | 静默 |
| 驱逐舰3 | W3 | 静默 |
| 预警机 | - | S1~S20 |
表2
武器对目标的拦截时段(场景1)"
| 平台武器 | T1 | T2 | T3 | T4 | T5 | T6 |
| W1 | 50~120 | 60~130 | 90~240 | 100~250 | - | - |
| W2 | 80~200 | 90~210 | 55~150 | 65~160 | 100~230 | 110~240 |
| W3 | - | - | 65~130 | 75~140 | 75~190 | 85~200 |
表3
武器对目标的拦截机会(场景1)"
| 平台武器 | T1 | T2 | T3 | T4 | T5 | T6 |
| W1 | 3 | 3 | 7 | 7 | 0 | 0 |
| W2 | 6 | 6 | 4 | 4 | 6 | 6 |
| W3 | 0 | 0 | 3 | 3 | 5 | 5 |
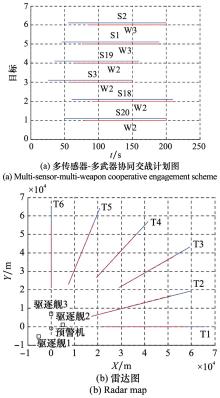
图2
场景1下的规划结果(拦截时机优化)"
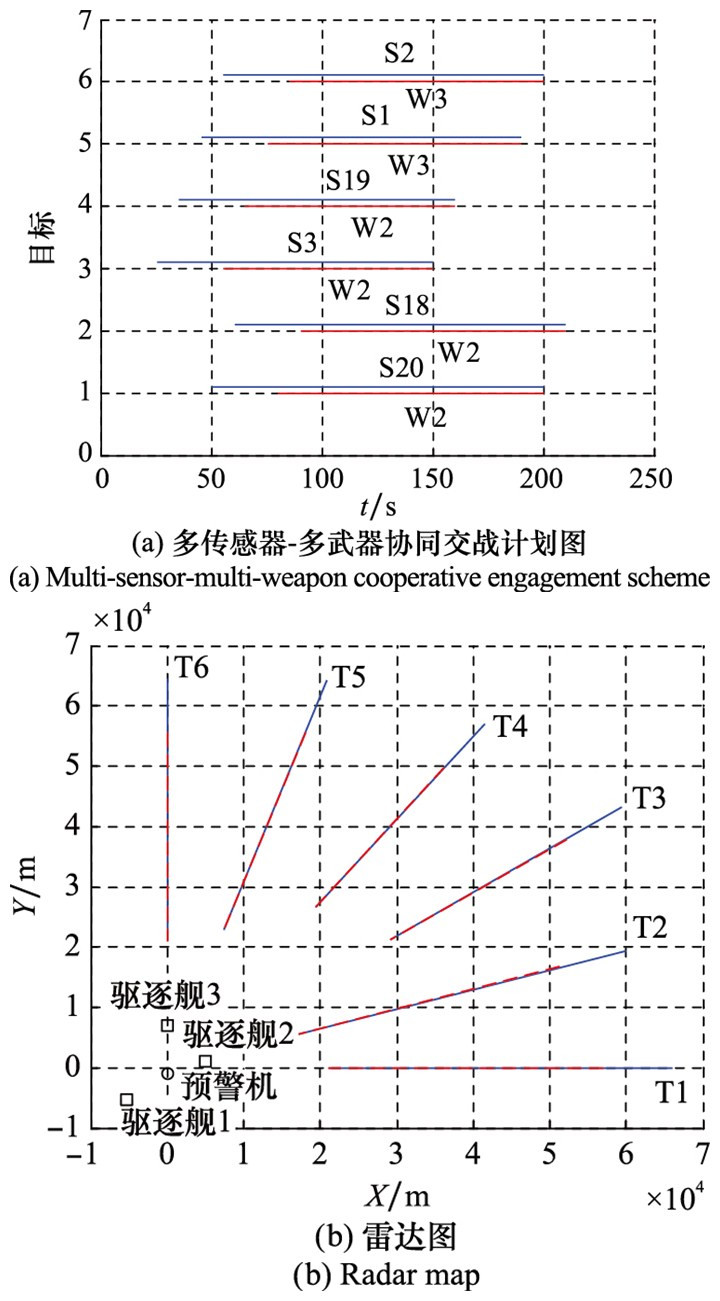
表4
场景1下的协同作战计划"
| 作战平台 | 跟踪任务 | 拦截任务 |
| 驱逐舰2 | - | T1: 80~200 T2: 90~210 T3: 55~150 T4: 65~160 |
| 驱逐舰3 | - | T5: 75~190 T6: 85~200 |
| 预警机 | T1: 50~200 | - |
| T2: 60~210 | - | |
| T3: 25~150 | - | |
| T4: 35~160 | - | |
| T5: 45~190 | - | |
| T6: 55~200 | - |
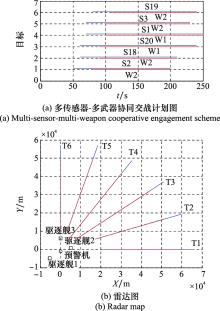
图3
场景1下的规划结果(拦截机会优化)"
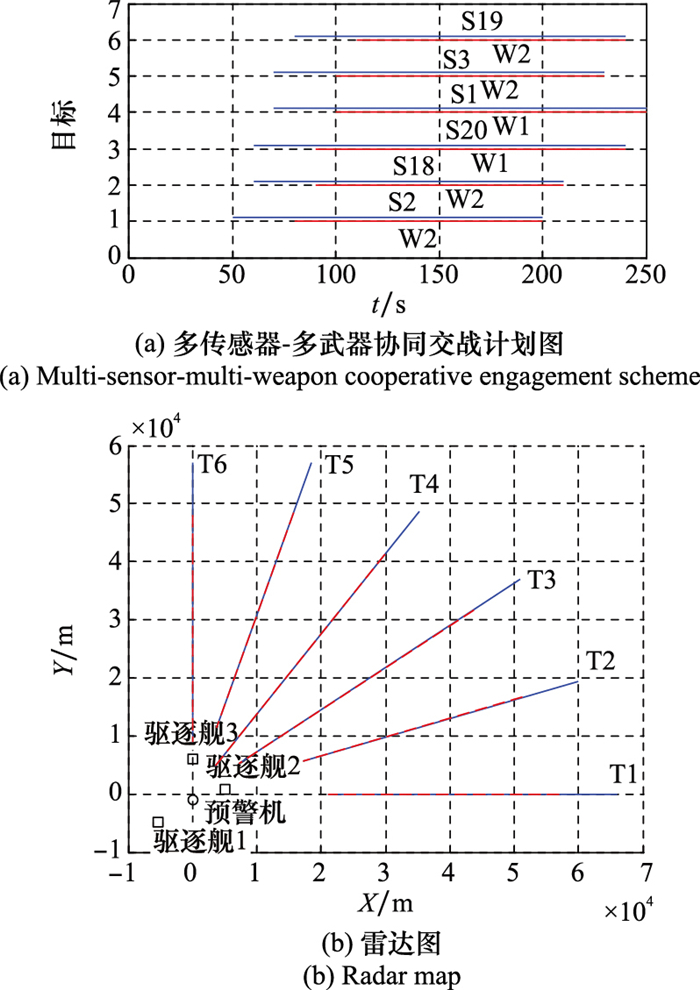
表5
场景2作战平台、传感器、武器的编号"
| 作战平台 | 平台武器 | 平台传感器 |
| 驱逐舰1 | W1 | S1~S10 |
| 驱逐舰2 | W2 | S11~S20 |
| 驱逐舰3 | W3 | S21~S30 |
| 预警机 | - | S31~S50 |
表6
武器对目标的拦截时段(场景2)"
| 平台武器 | T1~T8 | T9~T16 | T17~T24 |
| W1 | 50~250 | - | 65~235 |
| W2 | 55~245 | 50~250 | - |
| W3 | 65~235 | 60~240 | 75~220 |
表7
武器对目标的拦截机会(场景2)"
| 平台武器 | T1~T8 | T9~T16 | T17~T24 |
| W1 | 10 | 0 | 6 |
| W2 | 8 | 9 | 0 |
| W3 | 6 | 7 | 4 |
表8
传感器对目标的跟踪时段"
| 平台传感器 | T1~T8 | T9~T16 | T17~T24 |
| S1~S10 | 100~300 | - | 100~300 |
| S11~S20 | 150~300 | 10~300 | 15~300 |
| S21~S30 | 200~300 | 100~300 | 5~300 |
| S31~S50 | 1~200 | 1~200 | 1~200 |
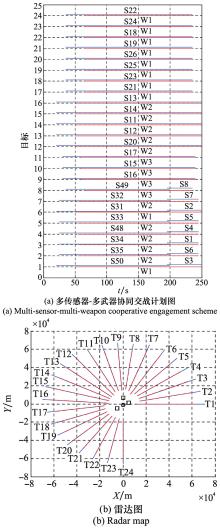
图4
场景2下的规划结果(拦截机会优化)"
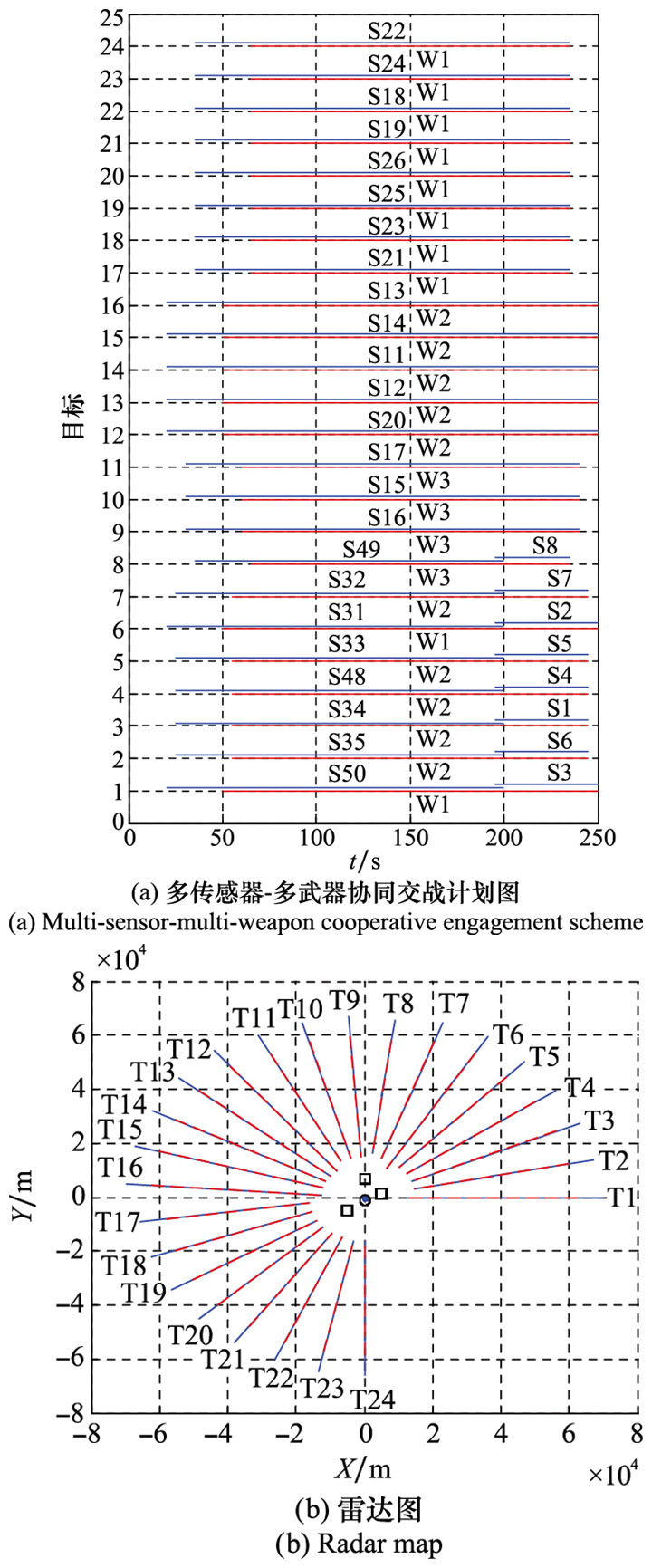
表9
场景2下的协同作战计划"
| 作战平台 | 跟踪任务 | 拦截任务 |
| 驱逐舰1 | T1: 195~240 T2: 195~240 T3: 195~240 T4: 195~240 T5: 195~240 T6: 195~250 T7: 195~240 T8: 195~250 - - | T1: 50~250 T6: 50~250 T17: 65~235 T18: 65~235 T19: 65~235 T20: 65~235 T21: 65~235 T22: 65~235 T23: 65~235 T24: 65~235 |
| 驱逐舰2 | T9: 30~240 T10: 30~240 T11: 30~240 T12: 20~250 T13: 20~250 T14: 20~250 T15: 20~250 T16: 20~250 T21: 35~235 T22: 35~235 | T2: 55~240 T3: 55~240 T4: 55~240 T5: 55~240 T7: 55~240 T12: 50~250 T13: 50~250 T14: 50~250 T15: 50~250 T16: 50~250 |
| 驱逐舰3 | T17: 35~235 T18: 35~235 T19: 35~235 T20: 35~235 T23: 35~235 T24: 35~235 | T8: 65~235 T9: 60~240 T10: 60~240 T11: 60~240 - - |
| 预警机 | T1: 20~200 T2: 25~200 T3: 25~200 T4: 25~200 T5: 25~200 T6: 20~200 T7: 25~200 T8: 35~200 | - - - - - - - - |
表10
场景2下传感器对目标的跟踪时段"
| 传感器 | T1~T8 | T9~T16 | T17~T24 |
| S1~S10 | 100~300 | - | 100~300 |
| S11~S20 | 200~300 | 150~300 | 150~300 |
| S21~S30 | 200~300 | 100~300 | 5~300 |
| S31~S50 | 1~200 | 1~200 | 1~200 |
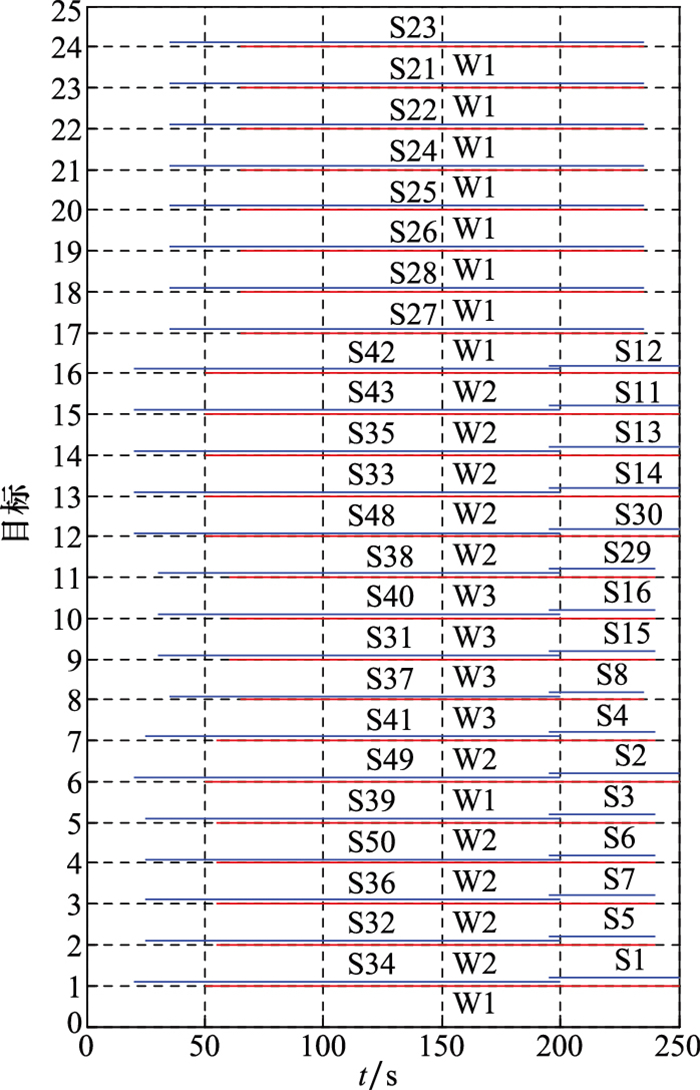
图5
场景2下的规划结果(拦截机会优化, 驱逐舰2探测能力削弱)"
| 1 | KARAKO T , RUMBAUGH W . Distributed defense new operational concepts for integrated air and missile defense[M]. Washington DC: Center for Strategic and International Studies, 2018. |
| 2 | DAVIS L , BEERY P , PAULO E . Investigation of integration and potential conflicts for distributed maritime operations and integrated air and missile defense[J]. Naval Engineers Journal, 2020, 132 (1): 83- 95. |
| 3 | WEISS G. Seeing 2020: America's new vision for integrated air and missile defense[R]. Washington DC: National Defense University, 2015: 104-112. |
| 4 | BRYAN C, DAN P, HASSISON S. Mosaic warfare exploiting artifical intelligence and autonomous systems to implement desion-centric operations[R]. Washington DC: Center for Strategic and Budgetary Assessments, 2020: 1-65. |
| 5 | 向南, 豆亚杰, 姜江, 等. 马赛克战概念下作战模块应急重构自主决策[J]. 指挥与控制学报, 2020, 3 (6): 223- 228. |
| XIANG N , DOU Y J , JIANG J , et al. Autonomous emergency decision-making of combat module under mosaic warfare[J]. Journal of Command and Control, 2020, 3 (6): 223- 228. | |
| 6 | NEWSTADT G, HERO A. Sensor management and provisioning for multiple target radar tracking systems[C]//Proc. of the IEEE International Conference on Acoustics Speech, and Signal Processing, 2012: 5273-5276. |
| 7 | SHARMA R, PARK D. Cooperative sensor resource management for multi target geolocalization using small fixed-wing unmanned aerial vehicles[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013. |
| 8 |
NI P , LIU J M , LIU Y L , et al. Research on mission planning for distributed multi-sensors in anti-TBM combat based on multi-agent system[J]. Sensor Letter, 2014, 12 (2): 325- 331.
doi: 10.1166/sl.2014.3280 |
| 9 |
FU Y F , LING Q , TIAN Z . Distributed sensor allocation for multitarget tracking in wireless sensor networks[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (4): 3538- 3553.
doi: 10.1109/TAES.2012.6324736 |
| 10 | 孙文, 王刚, 王晶晶, 等. 高速隐身目标多传感器协同探测跟踪任务分解策略[J]. 探测与控制学报, 2021, 43 (1): 68- 73. |
| SUN W , WANG G , WANG J J , et al. The mission decomposition strategy of the high-speed stealth target multi-sensor detection and tracking[J]. Journal of Detection & Control, 2021, 43 (1): 68- 73. | |
| 11 | 闫实, 贺静, 王跃东, 等. 基于强化学习的多机协同传感器管理[J]. 系统工程与电子技术, 2020, 42 (8): 1726- 1733. |
| YAN S , HE J , WANG Y D , et al. Multi-airborne cooperative sensor management based on reinforcement learning[J]. Systems Engineering and Electronics, 2020, 42 (8): 1726- 1733. | |
| 12 | NEEMA K, DELAURENTIS D. Consensus based heuristic algorithm for distributed sensor management[C]//Proc. of the AIAA Infotech, 2015. |
| 13 | SEVERSON T A , PALEY D A . Distributed multitarget search and track assignment with consensus-based coordination[J]. IEEE Sensors Journal, 2015, 15 (2): 864- 875. |
| 14 | 罗江锋, 朱承, 崔婧, 等. 舰艇防空火力规划与调度方法研究[J]. 国防科技大学学报, 2013, 35 (2): 40- 45. |
| LUO J F , ZHU C , CUI J , et al. Planning and scheduling for the air defense of warship[J]. Journal of National University of Defense Technology, 2013, 35 (2): 40- 45. | |
| 15 | 罗江锋, 朱承, 刘忠, 等. 连续多目标来袭下的舰艇防空火力在线调度[J]. 系统工程理论与实践, 2014, 34 (11): 2929- 2937. |
| LUO J F , ZHU C , LIU Z , et al. On-line schedule of the warship firepower when suffering from the attack of multiple continuous incoming objects[J]. Systems Engineering-Theory & Practice, 2014, 34 (11): 2929- 2937. | |
| 16 | LLOYD H. Application of a dynamic programming algorithm for weapon target assignment[R]. Edinburgh South Australia: Defence Science and Technology Group, Department of Defence, Australian Government, DST-Group-TR-3221, 2016: 1-22. |
| 17 | WANG Y , LI J , HUANG W L , et al. Dynamic weapon target assignment based on intuitionistic fuzzy entropy of discrete particle swarm[J]. China Communications, 2017, 14 (1): 169- 179. |
| 18 | VOLLE K , ROGERS J , BRINK K . Decentralized cooperative control methods for the modified weapon-target assignment problem[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (9): 1934- 1948. |
| 19 | KALYANAM K , CASBEER D , PACHTER M . Monotone optimal threshold feedback policy for sequential weapon target assignment[J]. Journal of Aerospace Information Systems, 2017, 14 (1): 68- 72. |
| 20 | XU J Z . Weapon-target assignment with fuzzy multi-objective ranking genetic algorithm[J]. Military Operation Research and System Engineering, 2010, 24 (3): 70- 74. |
| 21 | VOLLE K, ROGERS J, BRINK K. Scalable cooperative control algorithms for the weapon target assignment problem[C]//Proc. of the AIAA Guidance, Navigation, and Control Confe-rence, 2016. |
| 22 | 孙海文, 谢晓方, 庞威, 等. 基于改进火力分配模型的综合防空火力智能优化分配[J]. 控制与决策, 2020, 35 (5): 1102- 1112. |
| SUN H W , XIE X F , PANG W , et al. Integrated air defense firepower intelligence optimal assignment based on improved firepower assignment model[J]. Control and Decision, 2020, 35 (5): 1102- 1112. | |
| 23 | 刘振, 徐学文, 李静. 考虑协同制导的编队一体化防空问题分析与求解[J]. 指挥与控制学报, 2018, 4 (3): 213- 219. |
| LIU Z , XU X W , LI J . Analysis and solving for formation integrated air defense considering cooperative guidance[J]. Journal of Command and Control, 2018, 4 (3): 213- 219. | |
| 24 | 潘浩, 孙建军, 李双霖, 等. 基于网络探测数据的编队防空武器通道组织模型研究[C]//第八届中国指挥控制大会论文集, 2020: 741-747. |
| PAN H, SUN J J, LI S L, et al. Research on weapon organizing using network seneor data in coordinated air defense of naval vessel formation[C]//Proc. of the 8th China Conference on Command and Control, 2020: 741-747. | |
| 25 | ORHAN K . Air defense missile-target allocation models for a naval task group[J]. Computer & Operations Research, 2008, 35 (2): 1759- 1770. |
| 26 | MAHESWARARAJAH S, HALGAMUGE S. Sensor scheduling for target tracking using particle swarm optimization[C]//Proc. of the IEEE 63th Vehicular Technology Conference, 2006: 573-577. |
| 27 | GUPTA A, VIRMANI A, MAHAJAN P, et al. A particle swarm optimization-based cooperation method for multiple-target search by swarm UAVs in unknown environments[C]//Proc. of the 7th International Conference on Automation, Robotics and Applications, 2021: 95-100. |
| 28 | ZHU W M , HU X X , XIA W , et al. A two-phase genetic annealing method for intergrated earth observation satellite sche-duling problems[J]. Soft Computing, 2019, 23 (1): 181- 196. |
| 29 | DEB K . A fast elitist multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Trans.on Evolutionary Computation, 2000, 6 (2): 182- 197. |
| 30 | ZHAO Y , CHEN Y F , ZHEN Z Y , et al. Multi-weapon multi-target assignment based on hybrid genetic algorithm in uncertain environment[J]. International Journal of Advanced Robotic Systems, 2020, 17 (2): 1- 16. |
| 31 | ICOLARI V, TARCHI D, GUIDOTTI A, et al. Genetic inspired scheduling algorithm for cognitive satellite systems[C]//Proc. of the IEEE International Conference on Communications, 2016. |
| [1] | 吴文海, 郭晓峰, 周思羽, 高丽. 改进差分进化算法求解武器目标分配问题[J]. 系统工程与电子技术, 2021, 43(4): 1012-1021. |
| [2] | 余敏建, 嵇慧明, 韩其松, 毕伟. 基于合作协同进化的多机空战目标分配[J]. 系统工程与电子技术, 2020, 42(6): 1290-1300. |
| [3] | 刘家义, 王刚, 张杰, 王闯, 宋喜团. 基于改进AGD-分布式多智能体系统的目标优化分配模型[J]. 系统工程与电子技术, 2020, 42(4): 863-870. |
| [4] | 张阳, 司光亚, 王艳正. 无人机集群网电攻击行动协同目标分配建模[J]. 系统工程与电子技术, 2019, 41(9): 2025-2033. |
| [5] | 吴勇, 林文祥, 焦敬涛, 张建东. 基于归纳法的同构资源目标分配算法[J]. 系统工程与电子技术, 2019, 41(2): 342-348. |
| [6] | 徐洋, 伍友利, 黄晨, 刘同鑫. 基于改进两步裁定法的内埋空空导弹作战效能评估[J]. 系统工程与电子技术, 2019, 41(12): 2763-2771. |
| [7] | 褚骁庚, 马政伟, 陈行军. 面向多目标优化火力目标分配问题的前瞻式边际贪婪算法[J]. 系统工程与电子技术, 2019, 41(10): 2252-2259. |
| [8] | 刘庆国, 刘新学, 夏维, 郭会军. 多个多弹头在轨武器平台的目标分配优化[J]. 系统工程与电子技术, 2018, 40(5): 1050-1056. |
| [9] | 欧阳志宏, 薛磊, 丁锋. 对光电精确制导武器的区域电子防空干扰目标分配方法[J]. 系统工程与电子技术, 2018, 40(12): 2621-2628. |
| [10] | 谢俊洁, 罗鹏程, 穆富岭, 王骏, 丁帅. ABMS中基于Q学习算法的空战目标分配方法[J]. 系统工程与电子技术, 2017, 39(3): 557-561. |
| [11] | 王邑, 孙金标, 肖明清, 罗继勋. 基于类型2区间模糊K近邻分类器的动态武器目标分配方法研究[J]. 系统工程与电子技术, 2016, 38(6): 1314-1319. |
| [12] | 陈军伟, 常天庆, 张雷, 杨国振, 马殿哲. 面向装甲分队战法运用的两阶段WTA模型[J]. 系统工程与电子技术, 2016, 38(6): 1326-1331. |
| [13] | 段修生, 徐公国, 单甘霖. 基于协同Memetic自适应QPSO算法的传感器目标分配问题求解[J]. 系统工程与电子技术, 2016, 38(12): 2769-2776. |
| [14] | 常天庆, 陈军伟, 郝娜, 马殿哲. 装甲分队动态武器目标分配中蚁群算法终止控制[J]. 系统工程与电子技术, 2015, 37(2): 343-347. |
| [15] | 庞毅1, 孙青林1, 焦纲领2, 赵春龙1, 陈增强1. 基于多Agent的舰艇编队对海攻击仿真系统[J]. 系统工程与电子技术, 2015, 37(10): 2396-2403. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||