
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (2): 621-632.doi: 10.12305/j.issn.1001-506X.2025.02.28
• 制导、导航与控制 • 上一篇
祁新宇, 张智, 尚晓兵, 张艺琼, 姜立超, 周悦欣
收稿日期:2024-02-20
出版日期:2025-02-25
发布日期:2025-03-18
通讯作者:
张智
作者简介:祁新宇 (1999—), 男, 硕士研究生, 主要研究方向为不确定性量化、路径规划基金资助:Xinyu QI, Zhi ZHANG, Xiaobing SHANG, Yiqiong ZHANG, Lichao JIANG, Yuexin ZHOU
Received:2024-02-20
Online:2025-02-25
Published:2025-03-18
Contact:
Zhi ZHANG
摘要:
现有的船舶避碰轨迹规划大部分是以精确的运动模型和环境信息为前提, 难以应对实际环境中存在的多种不确定海况因素, 并导致规划出的轨迹安全可靠性降低。针对以上问题, 提出一种基于多项式混沌展开法的船舶鲁棒轨迹规划方法, 将船舶水动力学模型中的水动力系数视为不确定性参数, 以碰撞危险度及舵角控制量为目标函数, 建立船舶轨迹规划的最优控制模型, 并使用遗传算法求得控制量与优化后的轨迹。仿真实验结果表明, 优化后的轨迹最小距离以及最大会遇距离均提升10%~20%, 平均碰撞危险度降低10%, 实验结果表明考虑不确定性的船舶轨迹规划更加安全可靠。
中图分类号:
祁新宇, 张智, 尚晓兵, 张艺琼, 姜立超, 周悦欣. 基于多项式混沌展开的船舶避碰鲁棒轨迹规划[J]. 系统工程与电子技术, 2025, 47(2): 621-632.
Xinyu QI, Zhi ZHANG, Xiaobing SHANG, Yiqiong ZHANG, Lichao JIANG, Yuexin ZHOU. Robust trajectory planning for ship collision avoidance based on polynomial chaotic expansion[J]. Systems Engineering and Electronics, 2025, 47(2): 621-632.

图1
船舶三自由度模型"

表1
不确定性参数"
| 参数 | 均值 | 方差 |
| Xu | -0.047 644 | 0.005 |
| Yv | -0.145 3 | 0.020 |
| Yr | 0.366 66 | 0.020 |
| Nv | -0.161 65 | 0.020 |

图2
算法流程图"

表2
船舶会遇态势"
| 会遇态势 | 船舶 | 初始横坐标/m | 初始纵坐标/m | 初始速度/(m/s) | 初始艏向/rad |
| 对遇 | 本船 | 0 | 0 | 7 | 2π |
| 来船 | 0 | 350 | 7 | $-\frac{1}{2} \mathsf{π} $ | |
| 小角度右舷交叉 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 50 | 210 | 7 | $-\frac{2}{3}\mathsf{π} $ | |
| 大角度右舷交叉 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 160 | 80 | 7 | π | |
| 追越 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 0 | 80 | 7 | $\frac{1}{2}\mathsf{π} $ |
表3
仿真实验参数"
| 参数名称 | 取值 |
| a1 | 0.9 |
| a2 | 0.1 |
| kg | 3 |
| δmax/rad | 0.2π |
| Ψmin/rad | $-\frac{1}{3}\mathsf{π} $ |
| Ψmax/rad | $\frac{1}{3}\mathsf{π} $ |
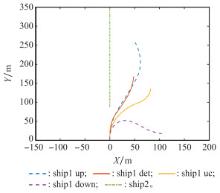
图3
对遇船舶的避碰轨迹"

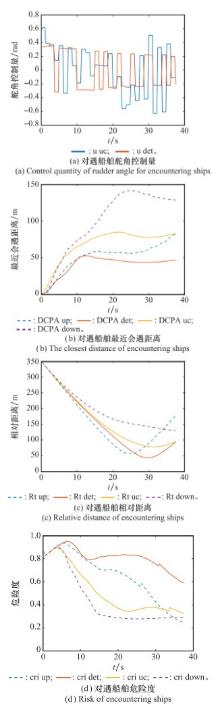
图4
会遇船舶避碰状态量"


图5
小角度右舷交叉船舶的避碰轨迹"

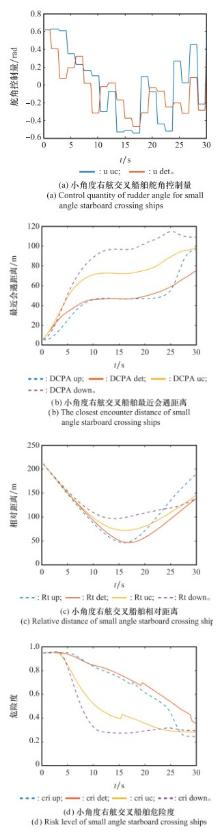
图6
小角度右舷交叉船舶避碰状态量"


图7
大角度右舷交叉船舶的避碰轨迹"


图8
大角度右舷交叉船舶避碰状态量"

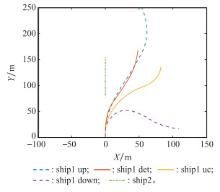
图9
追越船舶的避碰轨迹"
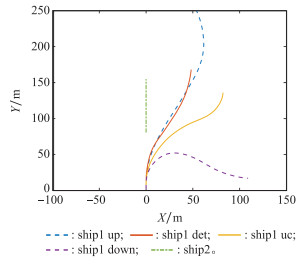

图10
追越船舶避碰状态量"

表4
避碰的评价指标"
| 指标 | 方法 | 对遇 | 小角度 右舷交叉 | 大角度 右舷交叉 | 追越 |
| RTmin/m | 确定性 | 43.5 | 46.8 | 34.0 | 33.4 |
| 鲁棒优化 | 77.9 | 72.2 | 37.1 | 42.2 | |
| DCPAmax/m | 确定性 | 52.6 | 75.6 | 62.2 | 46.4 |
| 鲁棒优化 | 84.9 | 98.1 | 67.3 | 83.9 | |
| 确定性 | 0.81 | 0.74 | 0.71 | 0.82 | |
| 鲁棒优化 | 0.52 | 0.51 | 0.61 | 0.70 |
| 1 | LI X P , ZHAO X Y , BAI D L . Marine transport efficiency evaluation of cross-border logistics based on AHP-TOPSIS method[J]. Journal of Coastal Research, 2020, 110 (SI): 95- 99. |
| 2 |
LIU R Z , WANG T , LI J D , et al. Simulation of seasonal transport of microplastics and influencing factors in the China Seas based on the ROMS model[J]. Water Research, 2023, 244, 120493.
doi: 10.1016/j.watres.2023.120493 |
| 3 |
HUANG Y , COLIN C , LIU Z F , et al. Impacts of nepheloid layers and mineralogical compositions of oceanic margin sediments on REE concentrations and Nd isotopic compositions of seawater[J]. Geochimica et Cosmochimica Acta, 2023, 359, 57- 70.
doi: 10.1016/j.gca.2023.08.026 |
| 4 |
LIANG X Y , WANG L Z , DU W , et al. Emission factors of oxygenated polycyclic aromatic hydrocarbons from ships in China[J]. Environmental Pollution, 2023, 337, 122483.
doi: 10.1016/j.envpol.2023.122483 |
| 5 | LI L L, WANG J K. SAR image ship detection based on ant co-lony optimization[C]//Proc. of the 5th International Congress on Image and Signal Processing, 2012: 1100-1103. |
| 6 |
夏悠然, 管军, 易文俊. 基于改进粒子群优化极限学习机的弹丸参数辨识[J]. 系统工程与电子技术, 2023, 45 (2): 521- 529.
doi: 10.12305/j.issn.1001-506X.2023.02.24 |
|
XIA Y R , GUAN J , YI W J . Projectile parameter identification: extreme learning machine optimized by improved particle swarm[J]. Systems Engineering and Electronics, 2023, 45 (2): 521- 529.
doi: 10.12305/j.issn.1001-506X.2023.02.24 |
|
| 7 | CHEN Y Q, LI T X. Collision avoidance of unmanned ships based on artificial potential field[C]//Proc. of the Chinese Automation Congress, 2017: 4437-4440. |
| 8 | REN L , ZHANG W X . Matching optimization of ship engine and propeller based on PSO-GA algorithm[J]. Applied Mechanics and Materials, 2012, 121, 4503- 4507. |
| 9 | CHEN X J, LIU Y X, HONG X B, et al. Unmanned ship path planning based on RRT[C]//Proc. of the International Conference on Intelligent Computing, 2018. |
| 10 | 杨荣武, 许劲松, 王鑫. 船舶自主避碰的慎思型轨迹规划[J]. 上海交通大学学报, 2019, 53 (12): 1411- 1419. |
| YANG R W , XU J S , WANG X . Deliberative trajectory planning for autonomous collision avoidance of ships[J]. Journal of Shanghai Jiao Tong University, 2019, 53 (12): 1411- 1419. | |
| 11 | 徐杨, 陆丽萍, 褚端峰, 等. 无人车辆轨迹规划与跟踪控制的统一建模方法[J]. 自动化学报, 2019, 45 (4): 799- 807. |
| XU Y , LU L P , CHU D F , et al. An unified modeling method for trajectory planning and tracking control of unmanned vehicles[J]. Journal of Automation, 2019, 45 (4): 799- 807. | |
| 12 | 姚绪梁, 王峰, 王景芳, 等. 不确定海流环境下水下机器人最优时间路径规划[J]. 控制理论与应用, 2020, 37 (6): 1302- 1310. |
| YAO X L , WANG F , WANG J F , et al. Optimal time path planning for underwater robots in uncertain ocean current environments[J]. Control Theory & Applications, 2020, 37 (6): 1302- 1310. | |
| 13 |
汪萌, 诸兵. 不确定性建模在2D和3D目标检测中的应用[J]. 系统工程与电子技术, 2023, 45 (8): 2370- 2376.
doi: 10.12305/j.issn.1001-506X.2023.08.10 |
|
WANG M , CHU B . Application of uncertainty modeling in 2D and 3D object detection[J]. Systems Engineering and Electro-nics, 2023, 45 (8): 2370- 2376.
doi: 10.12305/j.issn.1001-506X.2023.08.10 |
|
| 14 |
CHAUDHURI A , WAYCASTER G , PRICE N , et al. NASA uncertainty quantification challenge: an optimization-based methodology and validation[J]. Journal of Aerospace Information Systems, 2015, 12 (1): 10- 34.
doi: 10.2514/1.I010269 |
| 15 |
GHANEM R , YADEGARAN I , THIMMISETTY C , et al. Pro-babilistic approach to NASA Langley research center multidisciplinary uncertainty quantification challenge problem[J]. Journal of Aerospace Information Systems, 2015, 12 (1): 170- 188.
doi: 10.2514/1.I010271 |
| 16 |
BAI Y L , HUANG Z Y , LAM H . Model calibration via distributionally robust optimization: on the NASA Langley uncertainty quantification challenge[J]. Mechanical Systems and Signal Processing, 2022, 164, 108211.
doi: 10.1016/j.ymssp.2021.108211 |
| 17 |
SEPKA S A , WRIGHT M . Monte Carlo approach to FIAT uncertainties with applications for Mars science laboratory[J]. Journal of Thermophysics and Heat Transfer, 2011, 25 (4): 516- 522.
doi: 10.2514/1.49804 |
| 18 | HALDER A . Probabilistic methods for model validation[M]. College Station, Texas: Texas A&M University, 2014. |
| 19 | FEISCHL M , SCAGLIONI A . Convergence of adaptive stochastic collocation with finite elements[J]. Computers & Mathematics with Applications, 2021, 98, 139- 156. |
| 20 |
ZENG P , LI T B , CHEN Y , et al. New collocation method for stochastic response surface reliability analyses[J]. Engineering with Computers, 2020, 36, 1751- 1762.
doi: 10.1007/s00366-019-00793-2 |
| 21 |
JIA B , XIN M . Short-arc orbital uncertainty propagation with arbitrary polynomial chaos and admissible region[J]. Journal of Guidance, Control, and Dynamics, 2020, 43 (4): 715- 728.
doi: 10.2514/1.G004548 |
| 22 | WANG M J, HUANG Q B, LI S D. A subinterval response surface method for frequency response analysis of structural-acoustic system with uncertain-but-bounded parameters[C]//Proc. of the 4th International Conference on Industrial Engineering and Applications, 2017: 327-330. |
| 23 |
LUO Y Z , YANG Z . A review of uncertainty propagation in orbital mechanics[J]. Progress in Aerospace Sciences, 2017, 89, 23- 39.
doi: 10.1016/j.paerosci.2016.12.002 |
| 24 |
YIN S W , YU D J , LUO Z , et al. An arbitrary polynomial chaos expansion approach for response analysis of acoustic systems with epistemic uncertainty[J]. Computer Methods in Applied Mechanics and Engineering, 2018, 332, 280- 302.
doi: 10.1016/j.cma.2017.12.025 |
| 25 |
VITTALDEV V , RUSSELL R P , LINARES R . Spacecraft uncertainty propagation using Gaussian mixture models and polynomial chaos expansions[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (12): 2615- 2626.
doi: 10.2514/1.G001571 |
| 26 |
HOSDER S , WALTERS R W , BALCH M . Point-collocation nonintrusive polynomial chaos method for stochastic computational fluid dynamics[J]. AIAA Journal, 2010, 48 (12): 2721- 2730.
doi: 10.2514/1.39389 |
| 27 | 谢朔. 基于天牛须优化的船舶运动建模与避碰方法研究[D]. 武汉: 武汉理工大学, 2022. |
| XIE S. Research on ship motion modeling and collision avoidance methods based on optimization of longhorn whiskers[D]. Wuhan: Wuhan University of Technology, 2022. | |
| 28 |
郑中义, 吴兆麟. 船舶碰撞危险度的新模型[J]. 大连海事大学学报, 2002, 28 (2): 1- 5.
doi: 10.3969/j.issn.1006-7736.2002.02.001 |
|
ZHENG Z Y , WU Z L . A new model of ship collision risk[J]. Dalian Maritime University Journal, 2002, 28 (2): 1- 5.
doi: 10.3969/j.issn.1006-7736.2002.02.001 |
|
| 29 | VARELA J M , GUEDES SOARES C . Geometry and visual realism of ship models for digital ship bridge simulators[J]. Journal of Engineering for the Maritime Environment, 2017, 231 (1): 329- 341. |
| 30 | CHEN L Y , HUANG Y M , ZHENG H R , et al. Cooperative multi-vessel systems in urban waterway networks[J]. IEEE Trans.on Intelligent Transportation Systems, 2019, 21 (8): 3294- 3307. |
| 31 |
GAO H , ZOU Z J , XIA L , et al. Application of the NIPC-based uncertainty quantification in prediction of ship maneuverability[J]. Journal of Marine Science and Technology, 2021, 26, 555- 572.
doi: 10.1007/s00773-020-00754-1 |
| 32 |
KIM H J , KIM Y T , YOON D K . Dependence of polynomial chaos on random types of forces of KdV equations[J]. Applied Mathematical Modelling, 2012, 36 (7): 3080- 3093.
doi: 10.1016/j.apm.2011.09.086 |
| [1] | 吴浩南, 韩维, 潘子双, 郭放, 苏析超. 基于多层编码遗传算法的舰载机群兵力行动规划方法[J]. 系统工程与电子技术, 2025, 47(2): 555-567. |
| [2] | 王佩骐, 鞠儒生, 张淼, 段伟. 基于非支配遗传算法的HLA仿真系统数据采集策略[J]. 系统工程与电子技术, 2024, 46(9): 3103-3111. |
| [3] | 许强强, 柴华. 基于NSGA-Ⅱ的车载光学测量设备任务调度方案优化[J]. 系统工程与电子技术, 2024, 46(7): 2393-2400. |
| [4] | 李阳阳, 罗俊仁, 张万鹏, 项凤涛. 多星协同观测遗传-演进双层任务规划算法[J]. 系统工程与电子技术, 2024, 46(6): 2044-2053. |
| [5] | 蔡一鸣, 马力, 陆恒杨, 方伟. 基于全流程并行遗传算法的贝叶斯网络结构学习[J]. 系统工程与电子技术, 2024, 46(5): 1703-1711. |
| [6] | 尧泽昆, 王超, 施庆展, 张少卿, 袁乃昌. 基于改进离散模拟退火遗传算法的雷达网协同干扰资源分配模型[J]. 系统工程与电子技术, 2024, 46(3): 824-830. |
| [7] | 尹帅, 余建慧, 宋斌, 郭延宁, 李传江, 吕跃勇. 基于多种群混沌遗传算法的GEO目标服务任务规划[J]. 系统工程与电子技术, 2024, 46(3): 914-921. |
| [8] | 赵贵祥, 王晨旭, 周健, 李云淼. 基于改进模糊评价法的无人艇碰撞风险计算[J]. 系统工程与电子技术, 2024, 46(3): 1031-1037. |
| [9] | 张玉婷, 杨镜宇. 基于能力的国防资源分配方法[J]. 系统工程与电子技术, 2024, 46(2): 599-604. |
| [10] | 覃凯, 顾术实, 张智凯, 王玉, 刘倩, 赵晨, 张钦宇. 面向月表多设施通信网络的通信塔部署方案[J]. 系统工程与电子技术, 2024, 46(2): 729-739. |
| [11] | 马昌伟, 王亚平, 张煜, 胡灿灿. 基于资源动态补足的装备体系能力规划方法[J]. 系统工程与电子技术, 2024, 46(12): 4108-4115. |
| [12] | 饶悦, 杨健, 孙国敏, 张伟, 邵怀宗, 林静然. 基于改进SA-NSGAⅡ的多波束卫星动态资源分配方法[J]. 系统工程与电子技术, 2024, 46(12): 4222-4230. |
| [13] | 曹志强, 张佳, 辛斌. 间歇式信息传输条件下无人机搜索覆盖规划[J]. 系统工程与电子技术, 2024, 46(1): 152-161. |
| [14] | 邓勇, 姚锋, 邢立宁, 何磊. 基于混合进化算法的卫星网络星间数传方法[J]. 系统工程与电子技术, 2023, 45(9): 2931-2940. |
| [15] | 马维宁, 胡起伟, 曹文斌, 贾希胜. 考虑维修任务分配的装备选择性维修决策优化[J]. 系统工程与电子技术, 2023, 45(6): 1902-1910. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||