
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (1): 221-233.doi: 10.12305/j.issn.1001-506X.2023.01.26
• 制导、导航与控制 • 上一篇
李明杰, 周池军, 雷虎民, 邵雷, 骆长鑫
收稿日期:2021-09-09
出版日期:2023-01-01
发布日期:2023-01-03
通讯作者:
周池军
作者简介:李明杰 (1995—), 男, 博士研究生, 主要研究方向为再入滑翔目标轨迹预测、轨迹跟踪及智能算法基金资助:Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO
Received:2021-09-09
Online:2023-01-01
Published:2023-01-03
Contact:
Chijun ZHOU
摘要:
再入滑翔目标的轨迹预测是一项困难且具有意义的技术, 现有利用简单函数拟合控制参数进行轨迹预测的方法, 拟合精度不高且对数据的关联性不强。针对该问题, 本文结合长短期时序网络提出了基于控制参数估计的智能轨迹预测算法。首先, 通过设计快速轨迹生成算法, 结合攻角走廊模型快速生成大量机动轨迹, 构建数据集。然后, 建立了包含末点修正网络、控制参数修正网络及预测网络的智能轨迹预测框架, 利用数据集对关键控制参数的变化规律进行学习。最后, 结合目标运动模型积分外推实现轨迹的准确预测。仿真结果表明, 所设计的预测算法在不同机动模式下的预测平均误差不超过1.4 km, 最大误差不超过2.5 km, 能够实现轨迹的快速预测, 且对大气扰动造成的模型不确定性具有一定的鲁棒性。
中图分类号:
李明杰, 周池军, 雷虎民, 邵雷, 骆长鑫. 基于控制参数估计的再入滑翔目标智能轨迹预测算法[J]. 系统工程与电子技术, 2023, 45(1): 221-233.
Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO. An intelligent trajectory prediction algorithm of reentry glide target based on control parameter estimation[J]. Systems Engineering and Electronics, 2023, 45(1): 221-233.
图1
轨迹数据快速生成流程"

图2
摆动跳跃机动轨迹及攻角变化"
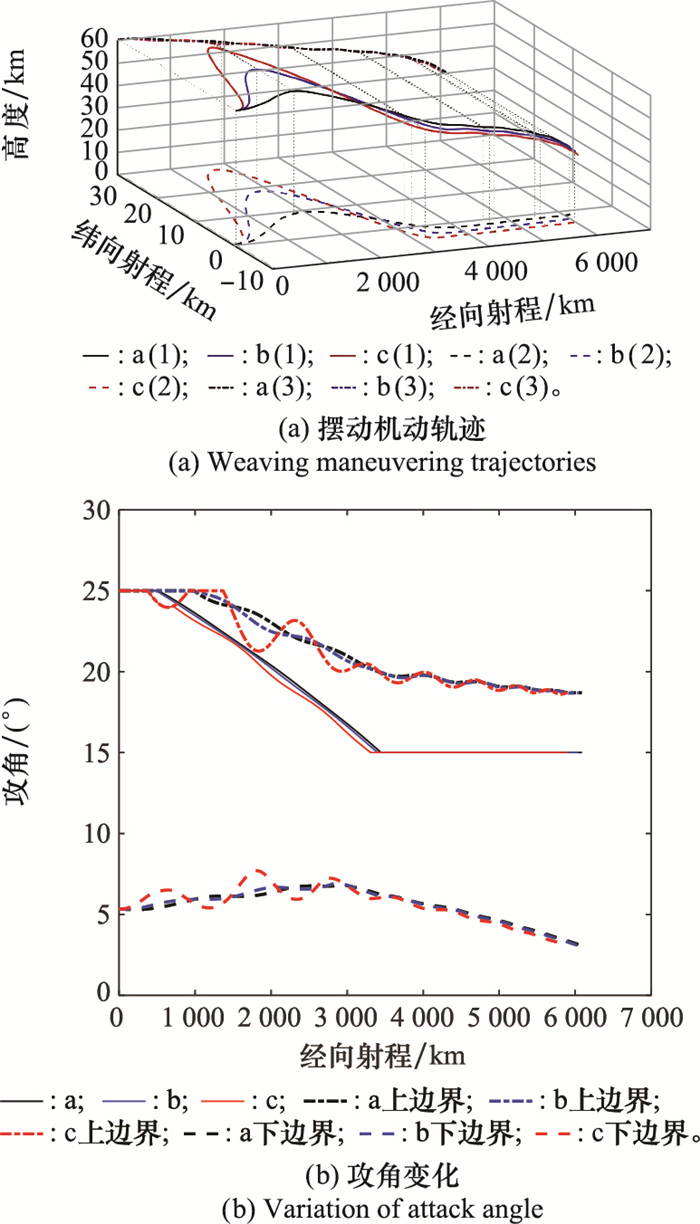

图3
转弯平衡机动轨迹及攻角变化"
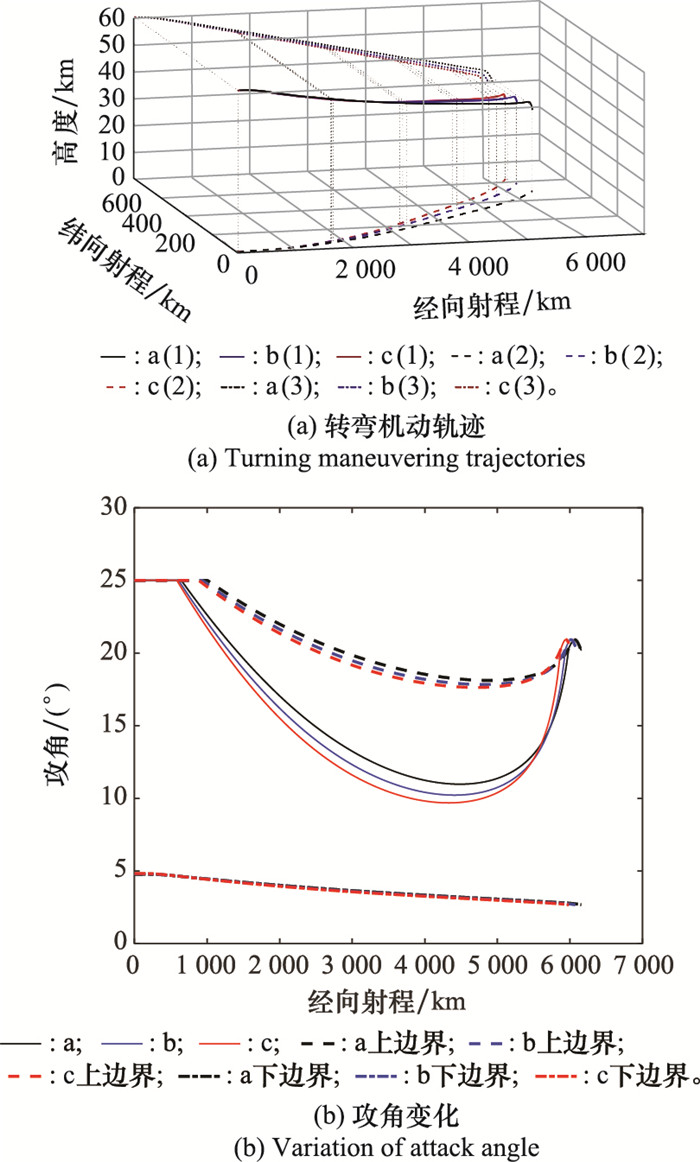
表1
仿真参数设置"
| 机动模式 | ||||
| a | b | c | ||
| 摆动滑翔 | 幅值/km | l=10 | l=30 | l=50 |
| 频率系数/m-1 | ω=5.00e-07 | ω=5.41e-07 | ω=5.88e-07 | |
| 转弯平衡 | 弧度系数/m-1 | a=2.63e-08 | a=3.13e-08 | a=3.45e-08 |

图4
转弯跳跃模式下KD, β, KL的变化规律"


图5
转弯跳跃模式下ξv, ξt, ξc参数的变化规律"
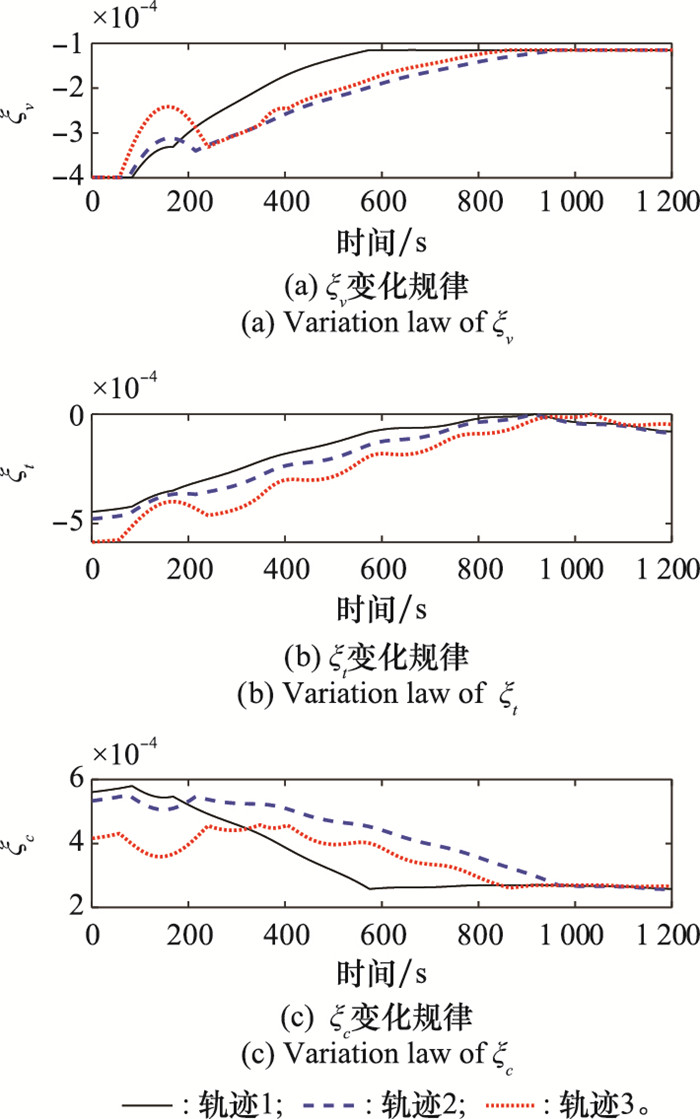
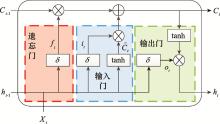
图6
LSTM网络结构"
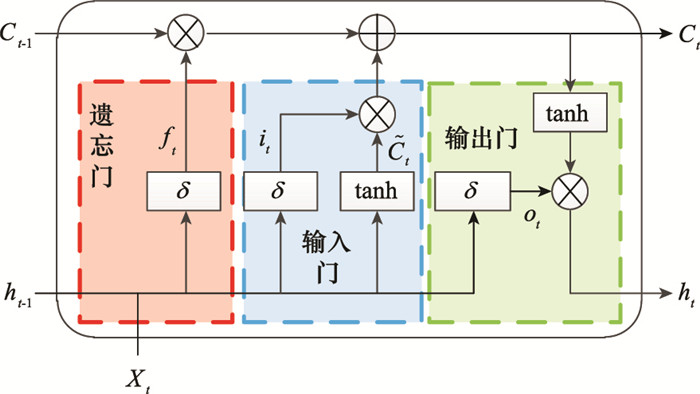

图7
基于控制参数的智能轨迹预测算法结构"


图8
末点修正网络结果"


图9
KD, β, KL参数滤波及修正结果"
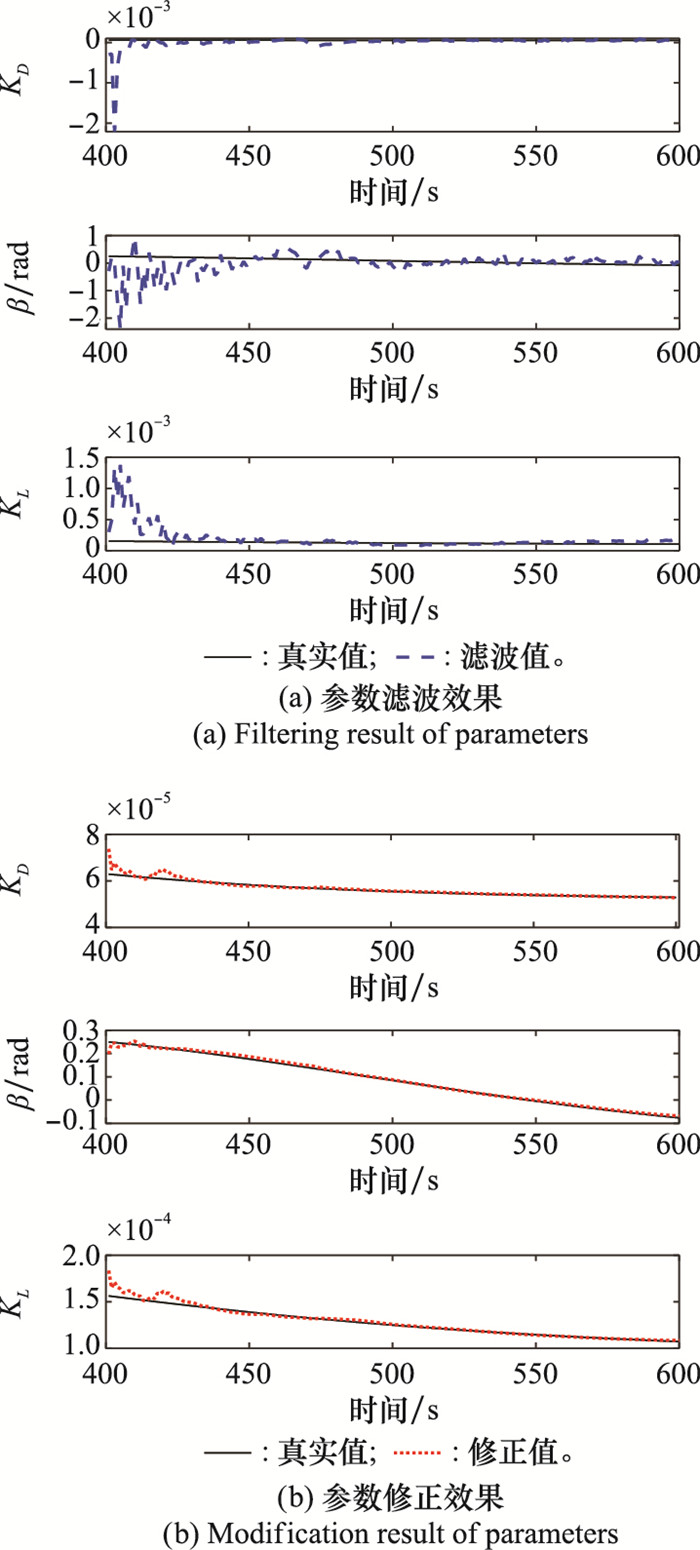

图10
ξv, ξt, ξc参数滤波及修正结果"


图11
有无滤波参数修正网络结果对比图"
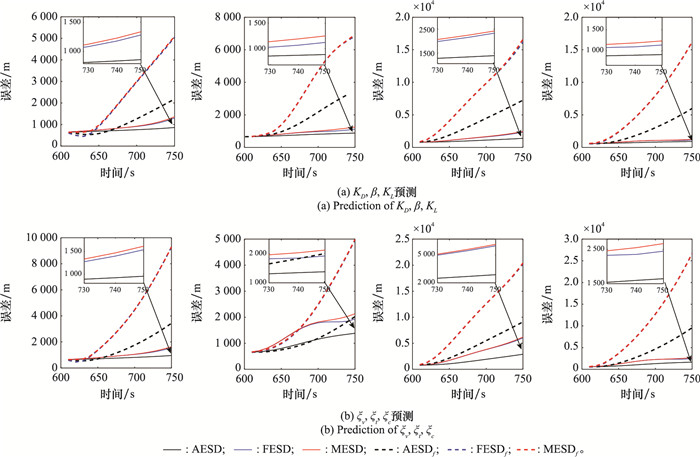
表2
有无修正网络150 s预测误差"
| 机动模式 | LSTM-DBL | LSTM-VTC | |||||||||||||
| 无修正网络 | 有修正网络 | 无修正网络 | 有修正网络 | ||||||||||||
| AESD | FESD | MESD | AESD | FESD | MESD | AESD | FESD | MESD | AESD | FESD | MESD | ||||
| 摆动平衡 | 2 184.70 | 5 057.76 | 5 101.18 | 862.93 | 1 304.57 | 1 360.30 | 3 433.40 | 9 301.19 | 9 302.30 | 958.75 | 1 553.21 | 1 631.40 | |||
| 摆动跳跃 | 3 274.29 | 6 836.88 | 6 932.67 | 884.03 | 1 124.26 | 1 252.08 | 2 024.38 | 4 969.29 | 4 990.14 | 1 384.02 | 1 929.26 | 2 133.39 | |||
| 转弯平衡 | 7 259.84 | 16 194.01 | 16 620.07 | 907.94 | 1 138.51 | 1 236.36 | 9 100.33 | 20 235.87 | 20 417.00 | 1 651.39 | 2 458.24 | 2 682.99 | |||
| 转弯跳跃 | 5 982.49 | 16 194.54 | 16 201.27 | 1 396.78 | 2 354.75 | 2 444.48 | 9 570.43 | 26 667.86 | 26 667.86 | 2 893.55 | 6 037.86 | 6 195.15 | |||
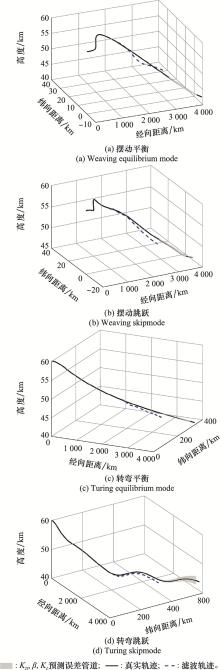
图12
LSTM-DBL误差管道"
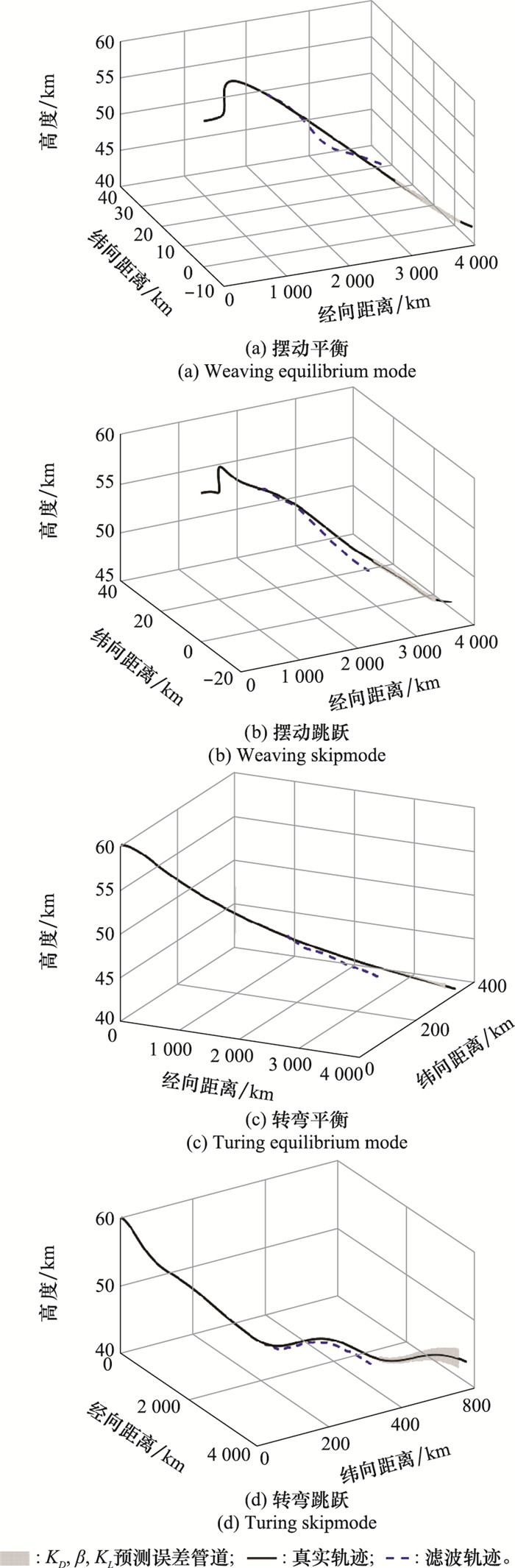
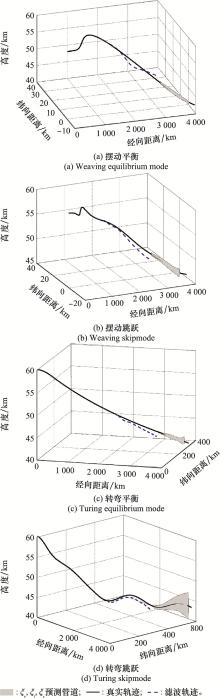
图13
LSTM-VTC误差管道"

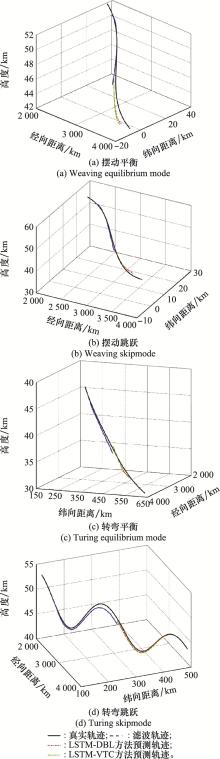
图14
大气密度误差下各机动模式预测轨迹"
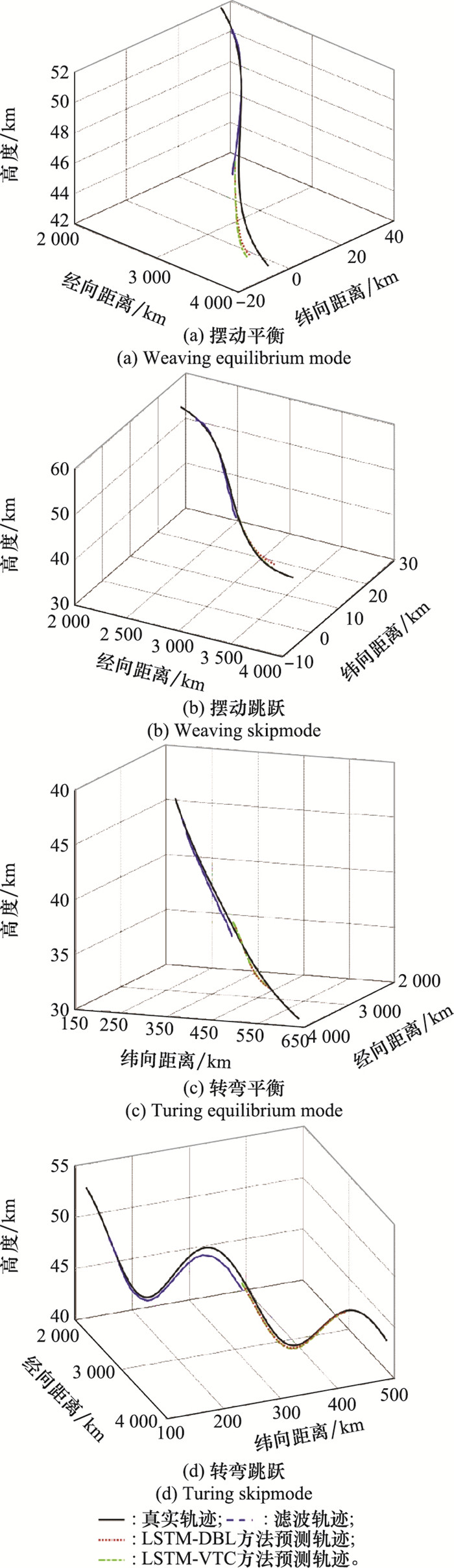
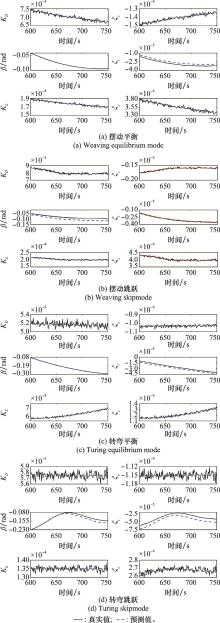
图15
大气密度误差下控制参数预测效果"
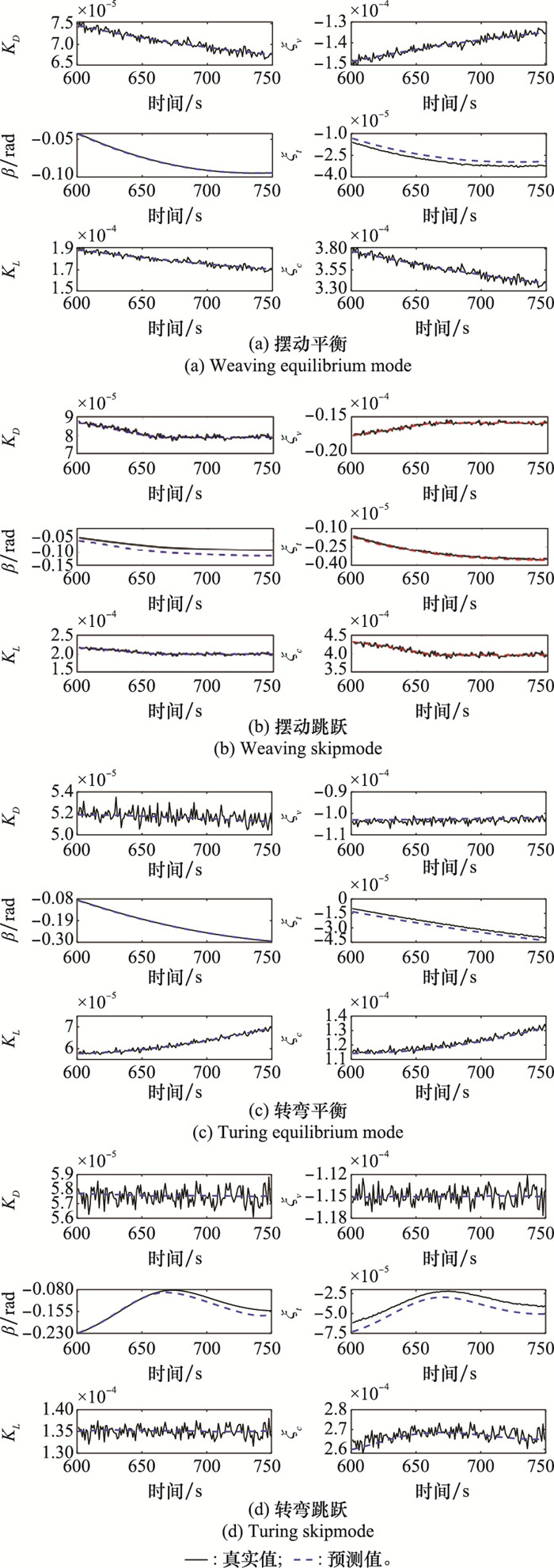
图16
各机动模式下轨迹预测效果"
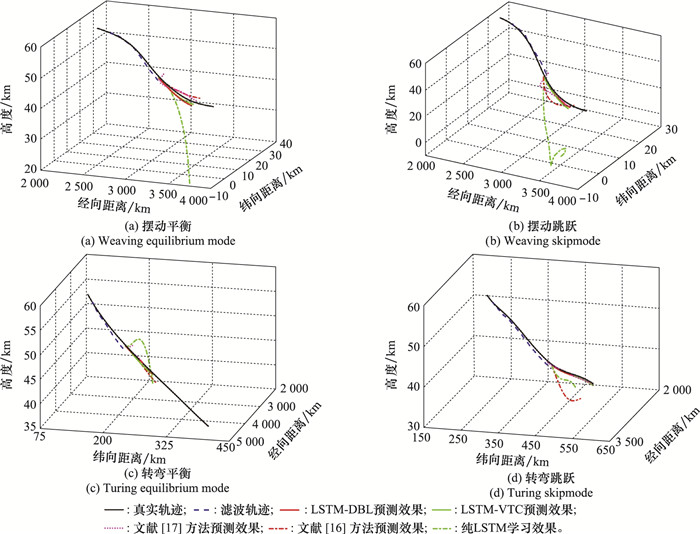
表3
不同预测方法对比结果"
| 算法 | 机动模式 | |||||
| 摆动平衡 | 摆动跳跃 | 转弯平衡 | 转弯跳跃 | 平均用时/s | ||
| LSTM-VTC | AESD/m | 958.75 | 1 384.02 | 1 651.39 | 2 893.55 | 0.015 3 |
| MESD/m | 1 631.40 | 2 133.39 | 2 682.99 | 6 195.15 | ||
| LSTM-DBL | AESD/m | 862.93 | 884.03 | 907.94 | 1 396.78 | 0.015 6 |
| MESD/m | 1 360.30 | 1 252.08 | 1 236.36 | 2 444.48 | ||
| ξv, ξt, ξc拟合 | AESD/m | 59 248.47 | 50 351.25 | 17 856 336 | 26 832.49 | 0.010 4 |
| MESD/m | 160 146.41 | 129 858.74 | 383 113.43 | 93 577.18 | ||
| KD, β, KL拟合 | AESD/m | 69 138.20 | 44 811.88 | 193 924.60 | 14 935.28 | 0.011 2 |
| MESD/m | 173 555.06 | 99 170.00 | 388 346.18 | 30 292.94 | ||
| 纯LSTM | AESD/m | 4 837.72 | 4 041.20 | 8 633.52 | 3 269.51 | 0.008 5 |
| MESD/m | 8 109.31 | 9 658.73 | 18 070.91 | 13 616.74 | ||
| 1 | XIE Y, LIU L H, TANG G J, et al. A reentry trajectory planning approach satisfying waypoint and no-fly zone constraints[C]//Proc. of the 5th International Conference on Recent Advances in Space Technologies, 2011: 241-246. |
| 2 |
LI F , XIONG J J , LAN X H , et al. Hypersonic vehicle trajectory prediction algorithm based on hough transform[J]. Chinese Journal of Electronics, 2021, 30 (5): 918- 930.
doi: 10.1049/cje.2021.07.003 |
| 3 | LUO C X , LEI H M , LI J , et al. A new adaptive neural control scheme for hypersonic vehicle with actuators multiple constraints[J]. Nonlinear Dynamics, 2020, 100 (3): 529- 553. |
| 4 | FERREIRA L O. Nonlinear dynamics and stability of hypersonic reentry vehicles[D]. Michigan: University of Michigan, 1995. |
| 5 |
CHEN X Q , HOU Z X , LIU J X , et al. Phugoid dynamic characteristic of hypersonic gliding vehicles[J]. Science China: Information Sciences, 2011, 54, 542- 550.
doi: 10.1007/s11432-011-4196-9 |
| 6 | VINH N X, KIM E K, GREENWOOD D T. Second-order analytical solutions for re-entry trajectories[C]//Proc. of the AIAA Atmospheric Flight Mechanic Conference, 1993. |
| 7 | VINH N X, KUO Z S. Improved matched asymptotic solutions for three-dimensional atmospheric skip trajectories[C]//Proc. of the AIAA/AAS Astrodynamic Conference, 1996. |
| 8 |
LU P . Asymptotic analysis of quasi-equilibrium glide in lifting entry flight[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (3): 662- 670.
doi: 10.2514/1.15789 |
| 9 |
韩春耀, 熊家军. 平衡滑翔高超声速飞行器弹道预测方法[J]. 现代防御技术, 2016, 44 (5): 120- 124.
doi: 10.3969/j.issn.1009-086x.2016.05.020 |
|
HAN C Y , XIONG J J . Prediction algorithm of equilibrium gliding hypersonic vehicle trajectory[J]. Modern Defence Techno-logy, 2016, 44 (5): 120- 124.
doi: 10.3969/j.issn.1009-086x.2016.05.020 |
|
| 10 |
程云鹏, 孙成志, 闫晓东. 基于SVM和EKF的高超声速滑翔飞行器轨迹预报[J]. 北京航空航天大学学报, 2020, 46 (11): 2094- 2105.
doi: 10.13700/j.bh.1001-5965.2020.0050 |
|
CHENG Y P , SUN C Z , YAN X D . Trajectory prediction of hypersonic glide vehicle based on SVM and EKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46 (11): 2094- 2105.
doi: 10.13700/j.bh.1001-5965.2020.0050 |
|
| 11 | LIU Y, LI X R. Intent based trajectory prediction by multiple model prediction and smoothing[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015: AIAA 2015-1324. |
| 12 |
GUILLERMO F , JUAN A B , JAVIER L L . Generation of aircraft intent based on a microstrategy search tree[J]. IEEE Trans.on Intelligent Transportation Systems, 2017, 18 (6): 1405- 1421.
doi: 10.1109/TITS.2016.2606368 |
| 13 |
张凯, 熊家军. 高超声速滑翔飞行器长期轨迹预测问题探讨[J]. 战术导弹技术, 2018, (4): 13- 17.
doi: 10.16358/j.issn.1009-1300.2018.7.216 |
|
ZHANG K , XIONG J J . Discussion on long-term trajectory prediction of hypersonic gliding reentry vehicle[J]. Tactical Missile Technology, 2018, (4): 13- 17.
doi: 10.16358/j.issn.1009-1300.2018.7.216 |
|
| 14 |
张凯, 熊家军, 李凡, 等. 基于意图推断的高超声速滑翔目标贝叶斯轨迹预测[J]. 宇航学报, 2018, 39 (11): 1258- 1265.
doi: 10.3873/j.issn.1000-1328.2018.11.008 |
|
ZHANG K , XIONG J J , LI F , et al. Bayesian trajectory prediction for a hypersonic gliding reentry vehicle based on intent inference[J]. Journal of Astronautics, 2018, 39 (11): 1258- 1265.
doi: 10.3873/j.issn.1000-1328.2018.11.008 |
|
| 15 |
HU Y D , GAO C S , LI J L , et al. Novel trajectory prediction algorithms for hypersonic gliding vehicles based on maneuver mode on-line identification and intent inference[J]. Measurement Science and Technology, 2021, 32 (11): 115012.
doi: 10.1088/1361-6501/ac1284 |
| 16 | 翟岱亮, 雷虎民, 李海宁, 等. 面向轨迹预测的高超声速飞行器气动性能分析[J]. 固体火箭技术, 2017, 40 (1): 115- 120. |
| ZHAI D L , LEI H M , LI H N , et al. Trajectory prediction oriented aerodynamic performances analysis of hypersonic vehicles[J]. Journal of Solid Rocket Technology, 2017, 40 (1): 115- 120. | |
| 17 |
李世杰, 雷虎民, 周池军, 等. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42 (10): 2320- 2327.
doi: 10.3969/j.issn.1001-506X.2020.10.21 |
|
LI S J , LEI H M , ZHOU C J , et al. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation[J]. Systems Engineering and Electronics, 2020, 42 (10): 2320- 2327.
doi: 10.3969/j.issn.1001-506X.2020.10.21 |
|
| 18 |
韩春耀, 熊家军, 张凯. 无动力滑翔高超声速飞行器轨迹预测方法[J]. 现代防御技术, 2018, 46 (3): 146- 151.
doi: 10.3969/j.issn.1009-086x.2018.03.022 |
|
HAN C Y , XIONG J J , ZHANG K . Method of trajectory prediction for unpowered gliding hypersonic vehicle[J]. Modern Defence Technology, 2018, 46 (3): 146- 151.
doi: 10.3969/j.issn.1009-086x.2018.03.022 |
|
| 19 |
GERS F A , SCHMIDHUBER J , CUMMINS F . Learning to forget: continual prediction with LSTM[J]. Neural Computation, 2000, 12 (10): 2451- 2471.
doi: 10.1162/089976600300015015 |
| 20 |
LIU K L , PENG Q , SUN H B , et al. A transferred recurrent neural network for battery calendar health prognostics of energy-transportation systems[J]. IEEE Trans.on Industrial Informatics, 2022, 18 (11): 8172- 8181.
doi: 10.1109/TII.2022.3145573 |
| 21 |
XIE G , SHANGGUAN A , FEI R , et al. Motion trajectory prediction based on a CNN-LSTM sequential model[J]. Science China: Information Sciences, 2020, 63, 212207.
doi: 10.1007/s11432-019-2761-y |
| 22 | 谢磊, 丁达理, 魏政磊, 等. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43 (6): 1651- 1658. |
| XIE L , DING D L , WEI Z L , et al. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM[J]. Systems Engineering and Electronics, 2021, 43 (6): 1651- 1658. | |
| 23 | 蔡远利, 邓逸凡, 苏悦华. 高超声速飞行器LSTM弹道分类与预报方法[C]//第21届中国系统仿真技术及其应用学术年会, 2020: 311-315. |
| CAI Y L, DENG Y F, SU Y H. LSTM based trajectory classification and prediction for hypersonic vehicle[C]//Proc. of the 21th China Annual Conference on System Simulation Technology and Application, 2020: 311-315. | |
| 24 |
XIE Y F , ZHUANG X B , XI Z P , et al. Dual-channel and bidirectional neural network for hypersonic glide vehicle trajectory prediction[J]. IEEE Access, 2021, 9, 92913- 92924.
doi: 10.1109/ACCESS.2021.3092515 |
| 25 |
LI G H , ZHANG H B , TANG G J . Flight-corridor analysis for hypersonic glide vehicles[J]. Journal of Aerospace Engineering, 2017, 30 (1): 06016005.
doi: 10.1061/(ASCE)AS.1943-5525.0000667 |
| 26 | LI G H , ZHANG H B , TANG G J . Maneuver characteristics analysis for hypersonic glide vehicles[J]. Aerospace Science and Technology, 2015, 43, 321- 328. |
| 27 | 雍恩米, 唐国金, 陈磊. 基于Gauss伪谱方法的高超声速飞行器再入轨迹快速优化[J]. 宇航学报, 2008, 29 (6): 1766- 1772. |
| YONG E M , TANG G J , CHEN L . Rapid trajectory optimization for hypersonic reentry vehicle via Gauss pseudospectral method[J]. Journal of Astronautics, 2008, 29 (6): 1766- 1772. | |
| 28 | PHILLIPS T H. A common aero vehicle (CAV) model, description, and employment guide[R]. Arlington: Schafer Corporation for AFRL and AFSPC, 2003. |
| 29 | LI S J , LEI H M , SHAO L , et al. Multiple model tracking for hypersonic gliding vehicles with aerodynamic modeling and analysis[J]. IEEE Access, 2019, 7, 28011- 28018. |
| 30 | 韩丁, 盛夏, 尹珊建, 等. 临近空间大气参数误差特性分析[J]. 遥感学报, 2017, 21 (1): 149- 158. |
| HAN D , SHENG X , YIN S J , et al. Deviation characteristics for atmospheric parameters in near space[J]. Journal of Remote Sensing, 2017, 21 (1): 149- 158. |
| [1] | 方伟, 王玉, 闫文君, 林冲. 基于神经网络的符号化飞行动作识别[J]. 系统工程与电子技术, 2022, 44(3): 737-745. |
| [2] | 蔺瑞管, 王华伟, 车畅畅, 倪晓梅, 熊明兰. 基于LSTM分类器的航空发动机预测性维护模型[J]. 系统工程与电子技术, 2022, 44(3): 1052-1059. |
| [3] | 谢磊, 丁达理, 魏政磊, 汤安迪, 张鹏. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43(6): 1651-1658. |
| [4] | 胡晓月, 康凯, 钱骅, 张舜卿. 基于LSTM的LEO卫星链路自适应算法[J]. 系统工程与电子技术, 2021, 43(1): 237-243. |
| [5] | 张宏鹏, 黄长强, 轩永波, 唐上钦. 用门控循环单元实时预测空战飞行轨迹[J]. 系统工程与电子技术, 2020, 42(11): 2546-2552. |
| [6] | 孟光磊, 周铭哲, 朴海音, 张慧敏. 基于协同战术识别的双机编队威胁评估方法[J]. 系统工程与电子技术, 2020, 42(10): 2285-2293. |
| [7] | 李世杰, 雷虎民, 周池军, 张涛. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42(10): 2320-2327. |
| [8] | 韩春耀, 熊家军, 张凯, 兰旭辉. 高超声速飞行器分解集成轨迹预测算法[J]. 系统工程与电子技术, 2018, 40(1): 151-158. |
| [9] | 王路, 邢清华, 毛艺帆. 基于升阻比变化规律的再入高超声速滑翔飞行器轨迹预测算法[J]. 系统工程与电子技术, 2015, 37(10): 2335-2340. |
| [10] | 朱晓辉,张军. 基于似然轨迹预测的空中交通复杂度评估方法[J]. 系统工程与电子技术, 2014, 36(2): 300-305. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||