
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (1): 210-220.doi: 10.12305/j.issn.1001-506X.2023.01.25
• 制导、导航与控制 • 上一篇
高利春1,2,*, 高铭阳1, 陈晓芳2, 饶建兵1, 费泽松3, 倪少杰4
收稿日期:2020-11-23
出版日期:2023-01-01
发布日期:2023-01-03
通讯作者:
高利春
作者简介:高利春 (1984—), 男, 高级工程师, 博士研究生, 主要研究方向为卫星通信、管理科学与工程基金资助:Lichun GAO1,2,*, Mingyang GAO1, Xiaofang CHEN2, Jianbing RAO1, Zesong FEI3, Shaojie NI4
Received:2020-11-23
Online:2023-01-01
Published:2023-01-03
Contact:
Lichun GAO
摘要:
可重复使用运载器在进近着陆阶段对位置偏差有较高的精度要求, 而现有的组合导航方式的导航误差波动幅度较大, 难以满足运载器在进近着陆段的导航要求。因此,本文利用捷联惯导系统(strap-down inertial navigation system,SINS)的非线性误差传播模型, 以陆基增强系统(ground based augmentation system,GBAS)输出的精确位置信息为基础, 建立SINS/GBAS组合导航方法, 并给出“输出+反馈”的组合导航复合修正结构。通过在GBAS中引入电离层误差及对流层误差, 从而实现了对于运载器定位误差在厘米级的精确定位。此外,通过引入扩展卡尔曼滤波技术, 有效地抑制了惯导误差漂移的问题。通过数值模拟仿真, 证明SINS/GBAS组合导航对飞行器进近着陆段的水平与高程定位误差不大于0.05 m, 测速误差不大于0.05 m/s, 从而证实了SINS/GBAS组合导航方式在可重复运载器在进近着陆段导航的可行性。
中图分类号:
高利春, 高铭阳, 陈晓芳, 饶建兵, 费泽松, 倪少杰. 基于SINS/GBAS组合导航的高精度进近着陆导航技术[J]. 系统工程与电子技术, 2023, 45(1): 210-220.
Lichun GAO, Mingyang GAO, Xiaofang CHEN, Jianbing RAO, Zesong FEI, Shaojie NI. High precision approach-and-landing navigation technology based on SINS/GBAS integrated navigation[J]. Systems Engineering and Electronics, 2023, 45(1): 210-220.
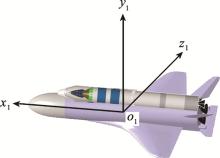
图1
运载器本体系定义"
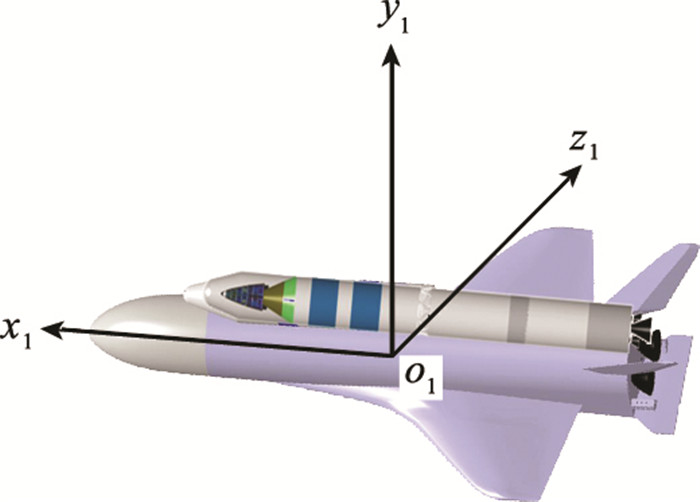
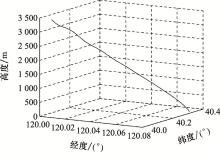
图2
三维标称轨迹曲线"
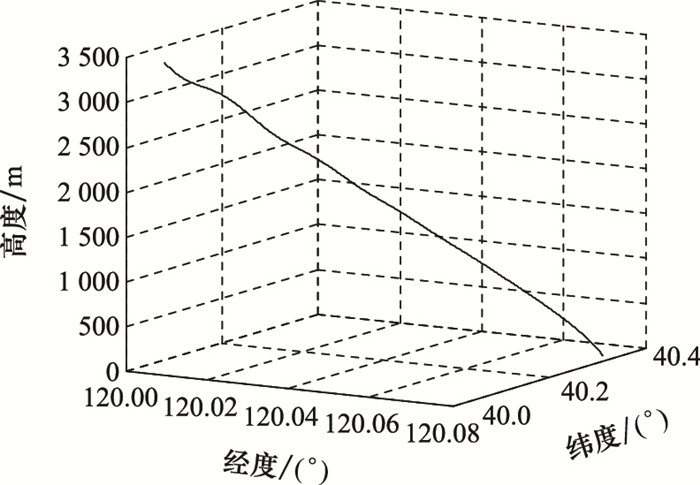
表1
加速度计与光纤陀螺指标参数"
| 项目 | 加速度计 | 光纤陀螺 |
| 零偏稳定性 | 0.1 mg(1σ) | 1.0°/h(3σ) |
| 零漂 | 0.02 mg(1σ) | 0.1°/h(3σ) |
| 一次项系数 | ≤5×10-5 | ≤1×10-4 |
| 安装偏差/(″) | ≤18 | ≤27 |
| 抗冲击特性 | 1 000g | 500g |
| 动态范围 | 20g | 500°/s |
| 初始姿态偏差/(°) | 俯仰: -0.58 | |
| 偏航: -0.49 | ||
| 滚转: 0.80 | ||
| 解算周期/ms | 10 | |
图3
X轴视加速度变化曲线"
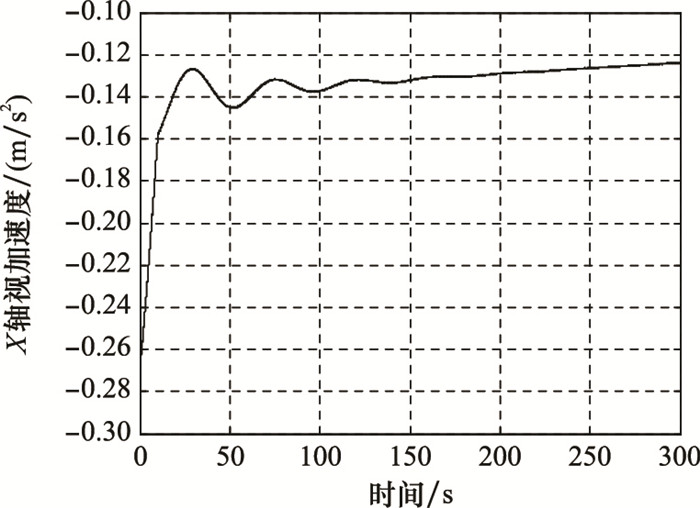
图4
Y轴视加速度变化曲线"
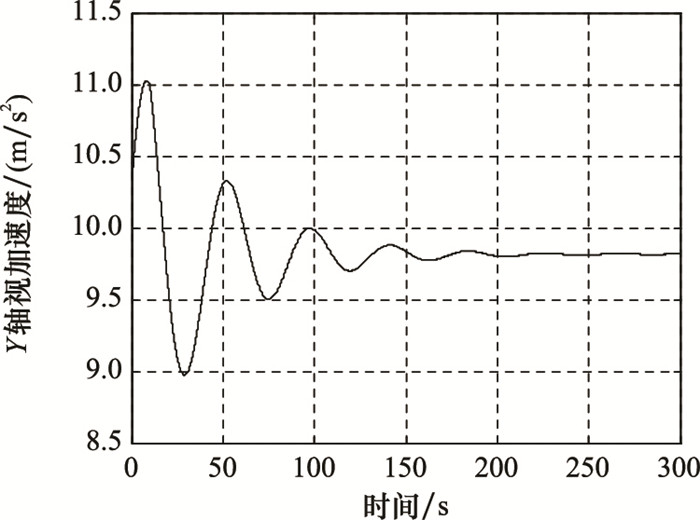
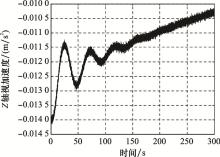
图5
Z轴视加速度变化曲线"
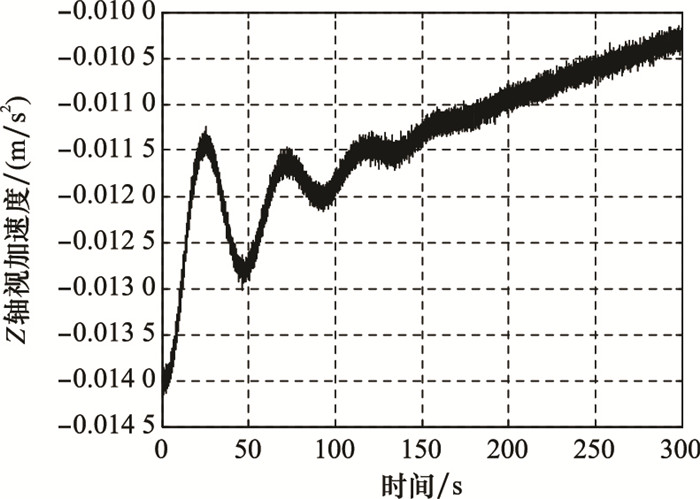
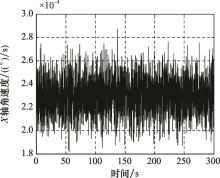
图6
X轴角速度变化曲线"

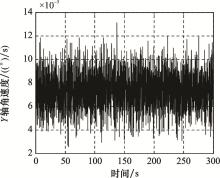
图7
Y轴角速度变化曲线"

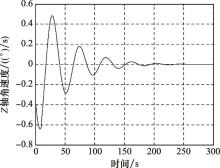
图8
Z轴角速度变化曲线"
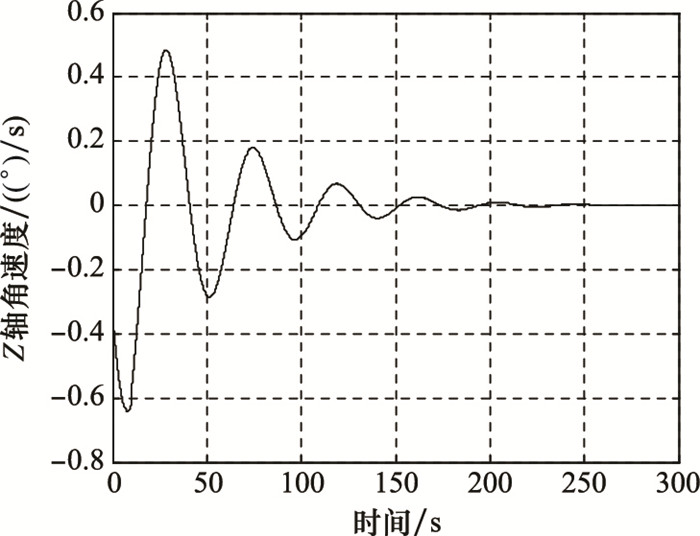
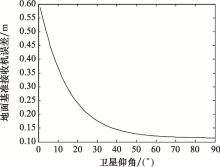
图9
地面接收机误差随卫星仰角变化曲线"
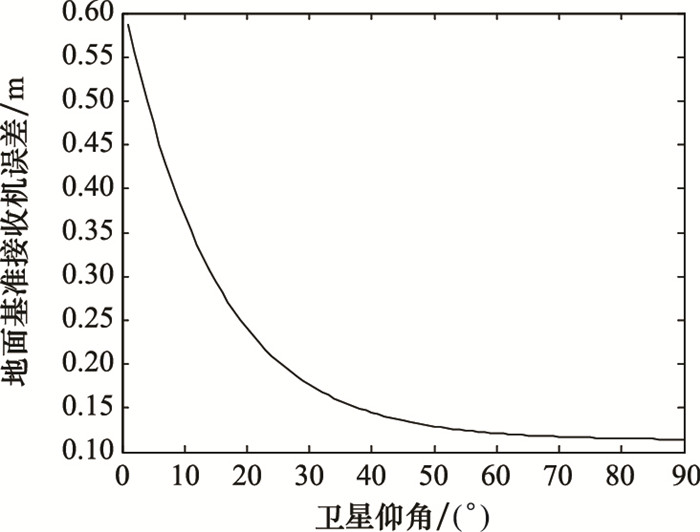
图10
运载器与基准接收机的斜距变化曲线"
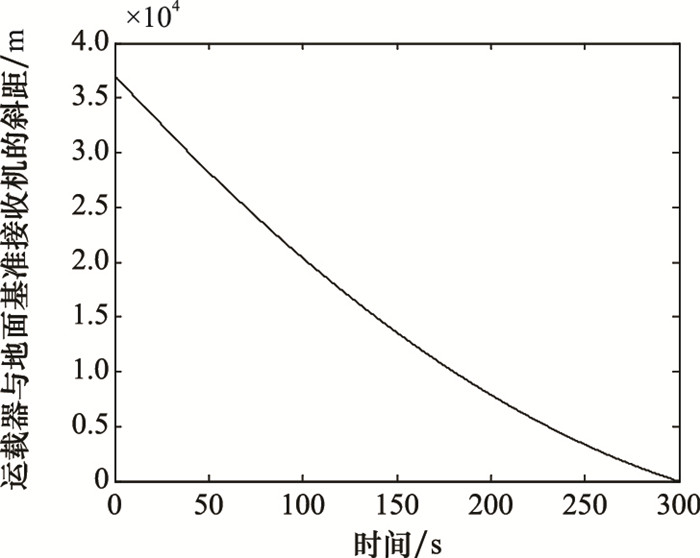

图11
运载器在水平方向上的速度变化曲线"

图12
不同卫星仰角下电离层误差随时间变化曲线"
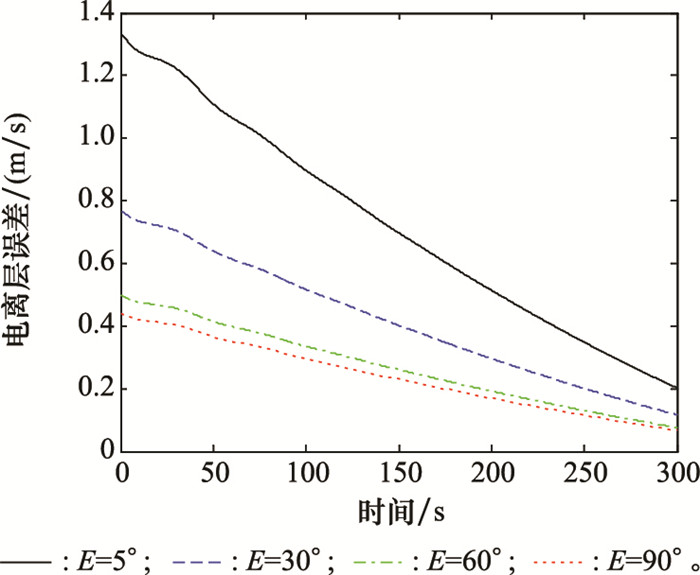
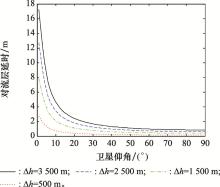
图13
对流层延时误差随卫星仰角变化曲线"

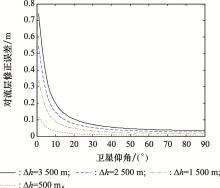
图14
修正误差随卫星仰角变化曲线"
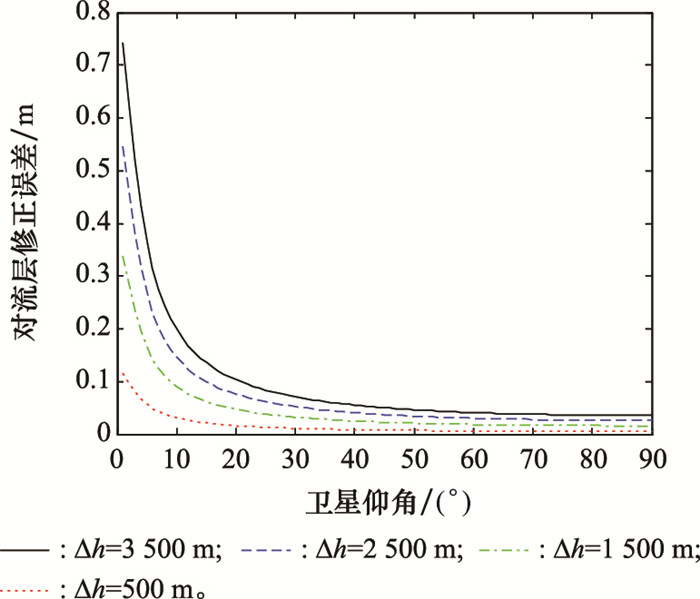
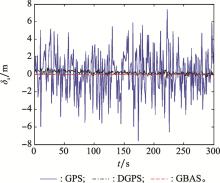
图15
GPS、DGPS和GBAS在X方向的误差曲线"

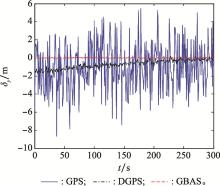
图16
GPS、DGPS和GBAS在Y方向的误差曲线"
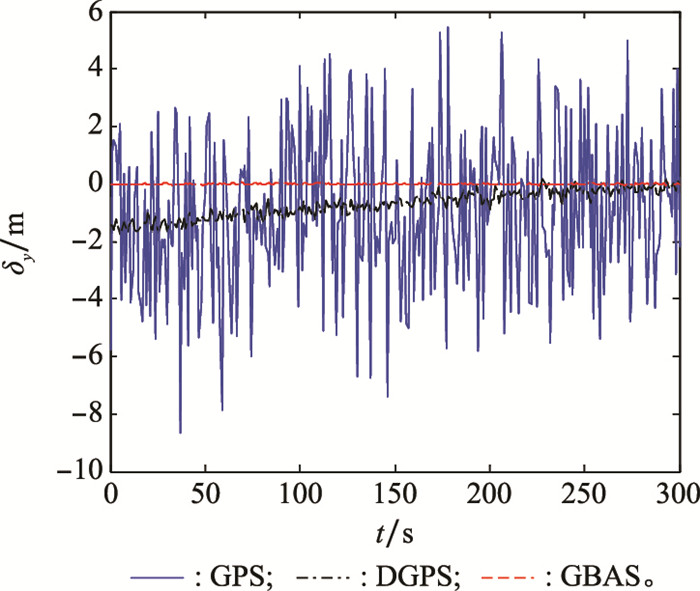

图17
GPS、DGPS和GBAS在Z方向的误差曲线"
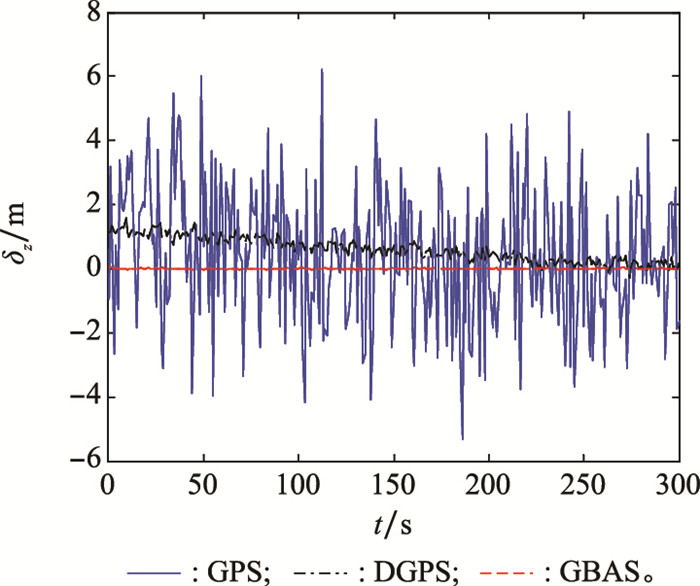
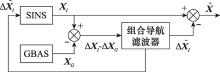
图18
“输出+反馈”复合校正组合导航结构图"
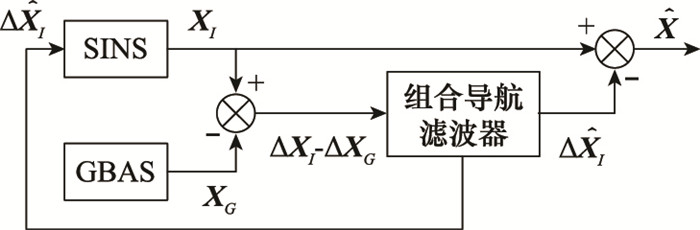
表2
SINS/GBAS组合导航仿真初始条件"
| GBAS精度指标 | 数值 |
| 定位精度(水平)/m | 0.03(1σ) |
| 定位精度(高程)/m | 0.05(1σ) |
| 数据更新/ms | 100 |
| 组合导航周期/ms | 100 |
表3
SINS/GPS组合导航仿真初始条件"
| GPS精度指标 | 数值 |
| 定位精度(水平)/m | 6.0(1σ) |
| 定位精度(高程)/m | 8.0(1σ) |
| 测速精度/(m/s) | 0.2(1σ) |
| 数据更新/ms | 100 |
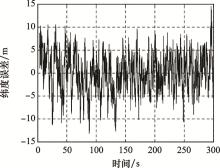
图19
SINS/GPS组合导航纬度误差曲线"
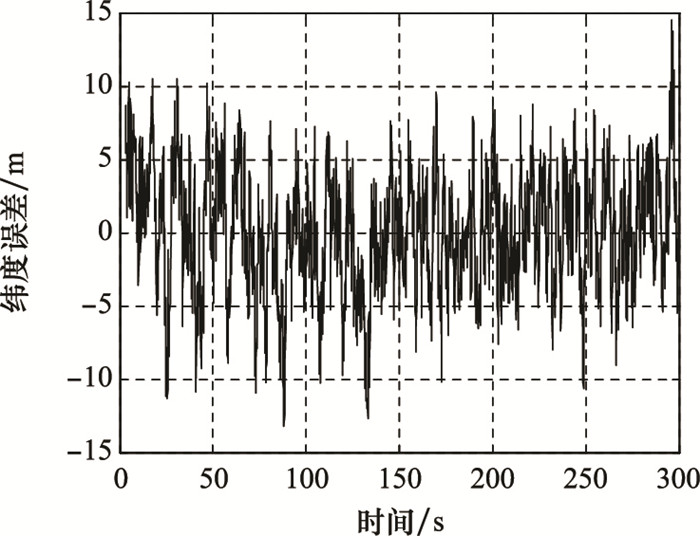
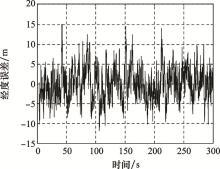
图20
SINS/GPS组合导航经度误差曲线"
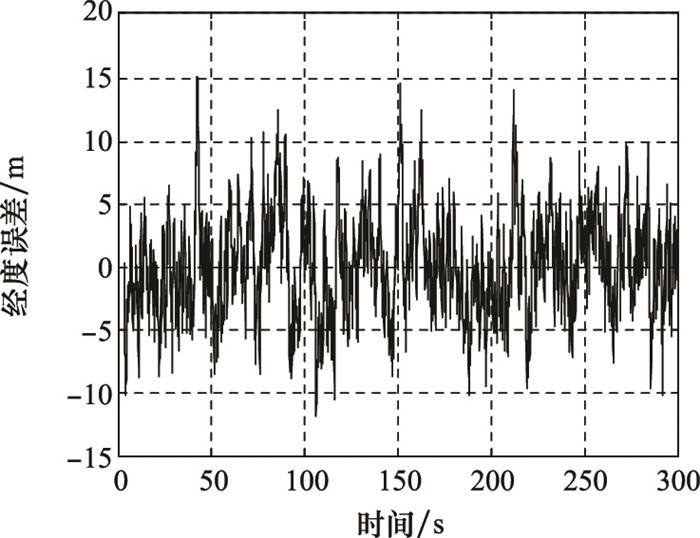
图21
SINS/GPS组合导航高度误差曲线"
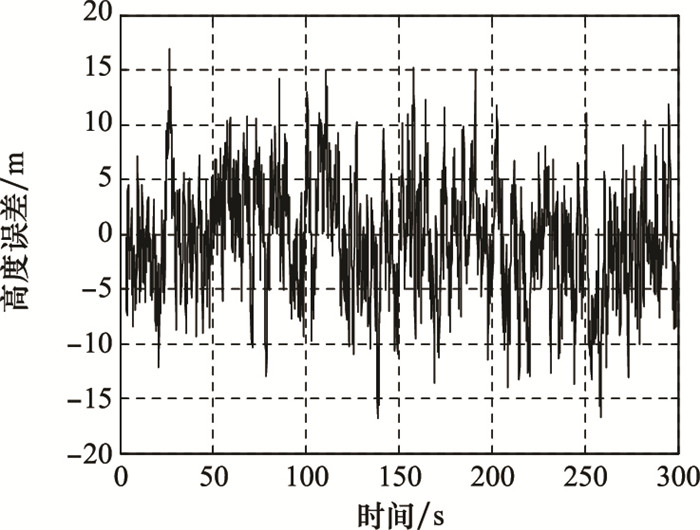
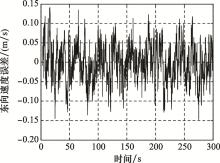
图22
SINS/GPS组合导航东向速度误差曲线"
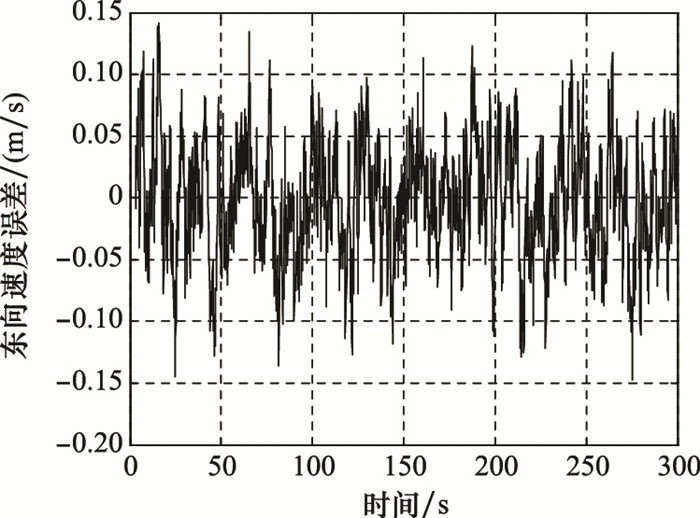
图23
SINS/GPS组合导航北向速度误差曲线"
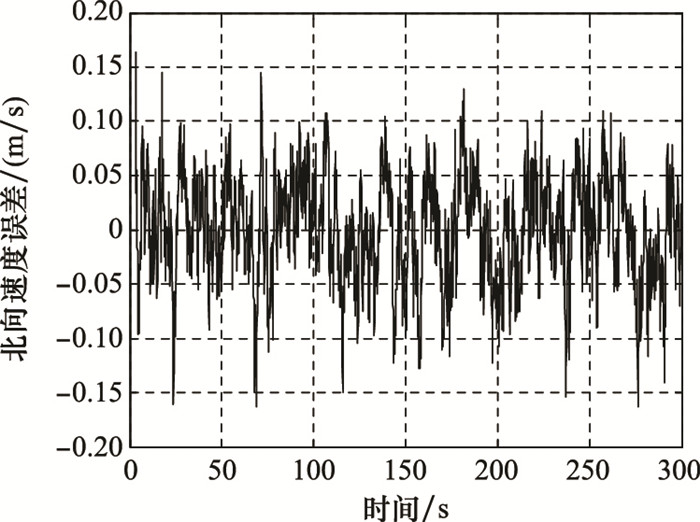
图24
SINS/GPS组合导航天向速度误差曲线"
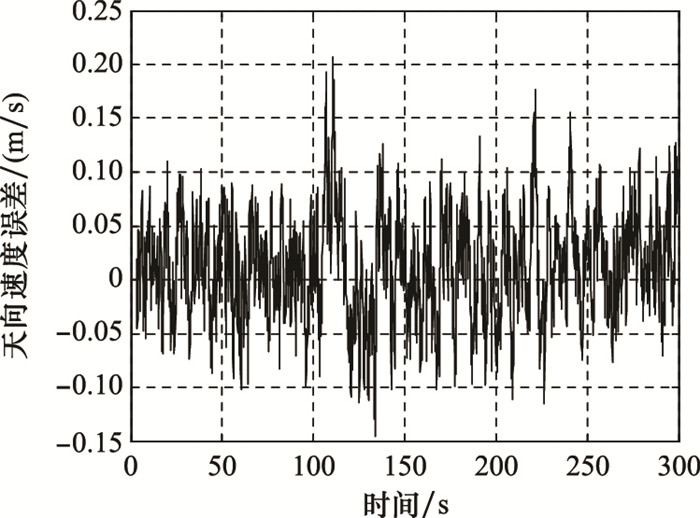
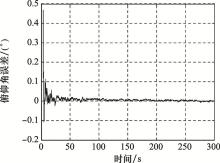
图25
SINS/GPS组合导航俯仰角误差曲线"
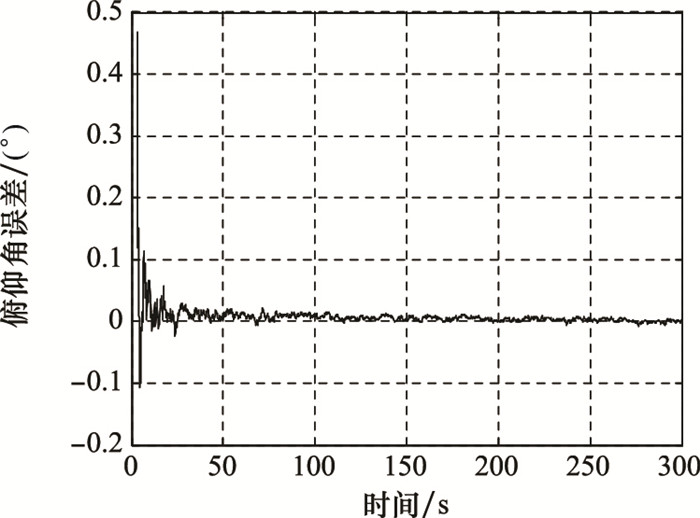
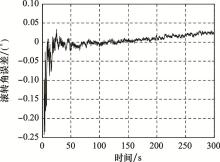
图26
SINS/GPS组合导航滚转角误差曲线"
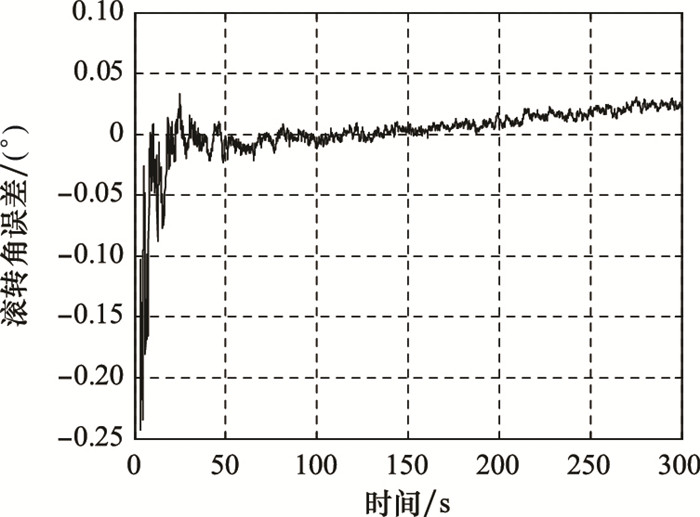
表4
SINS/GPS组合导航精度指标"
| 速度误差/(m/s) | 位置误差/m | 姿态误差/(′) |
| 水平: 0.159(1σ) | 水平: 5.59(1σ) | 滚转: 0.67(1σ) |
| 高程: 0.147(1σ) | 高程: 5.35(1σ) | 俯仰: 0.42(1σ) |
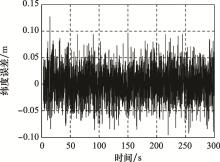
图27
SINS/GBAS组合导航纬度误差曲线"
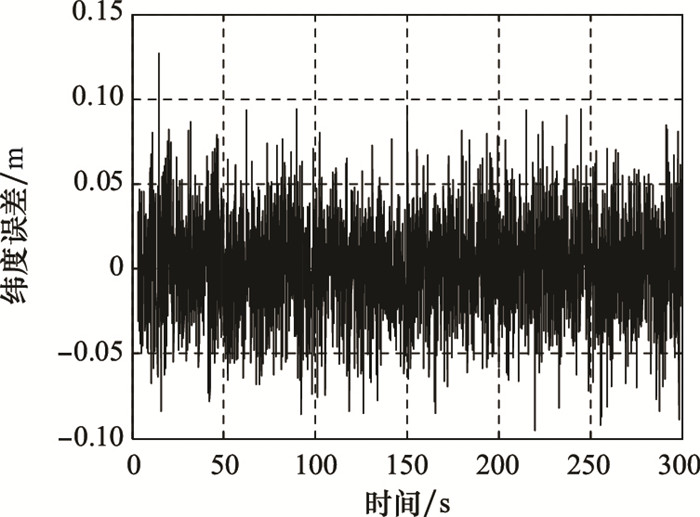
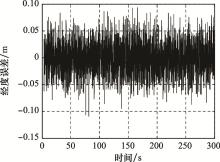
图28
SINS/GBAS组合导航经度误差曲线"
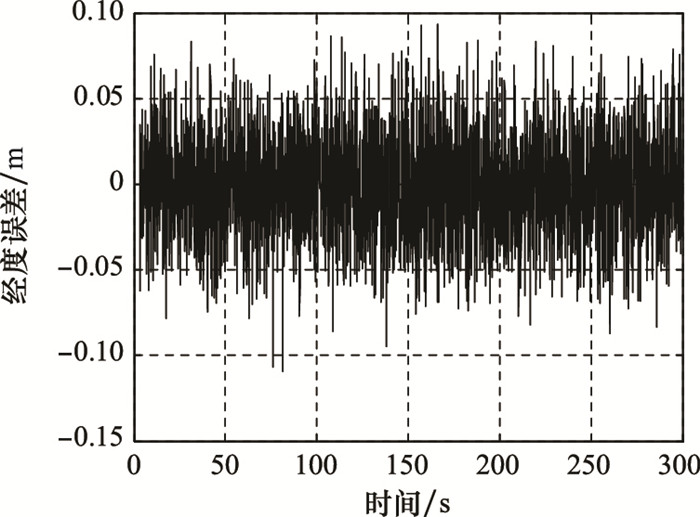
图29
SINS/GBAS组合导航高度误差曲线"
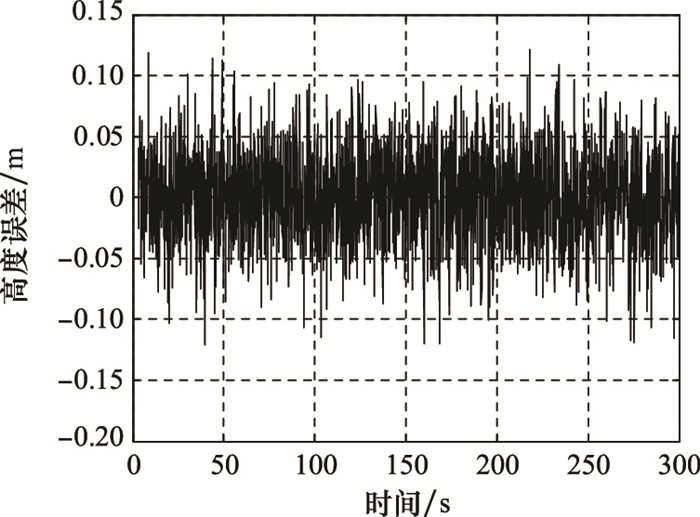
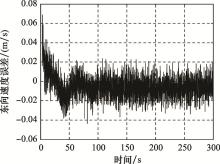
图30
SINS/GBAS组合导航东向速度误差曲线"

图31
SINS/GBAS组合导航北向速度误差曲线"
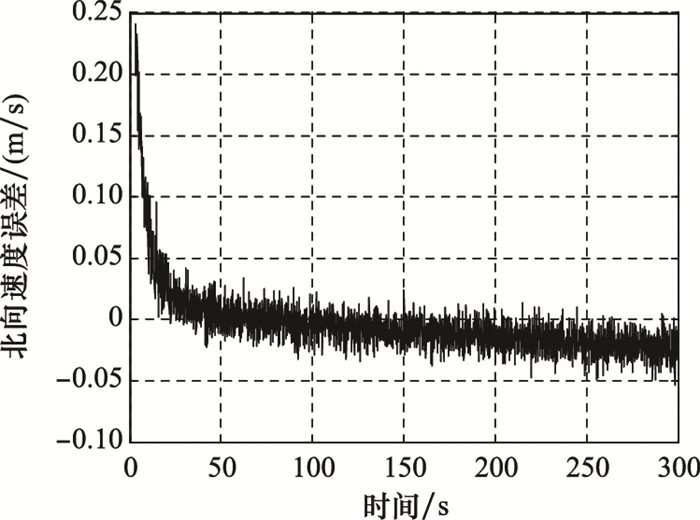

图32
SINS/GBAS组合导航天向速度误差曲线"
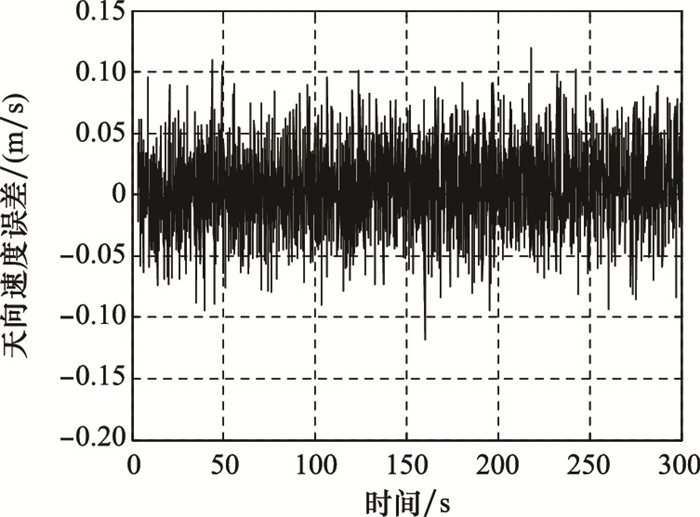
图33
SINS/GBAS组合导航俯仰角误差曲线"

图34
SINS/GBAS组合导航滚转角误差曲线"
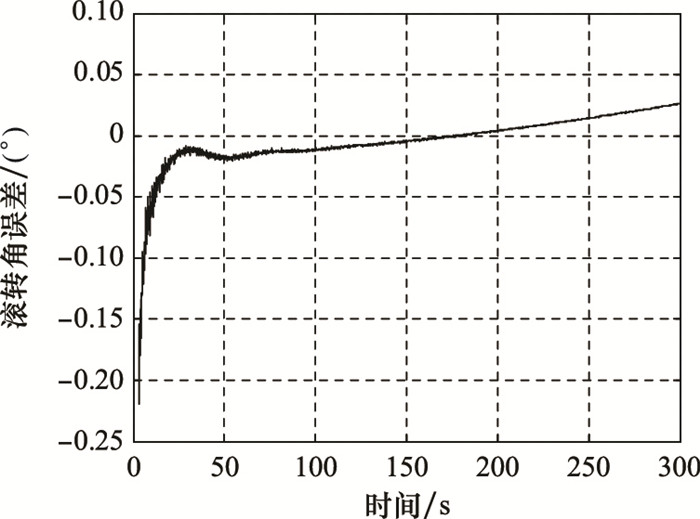
表5
SINS/GBAS组合导航精度指标"
| 速度误差/(m/s) | 位置误差/m | 姿态误差/(′) |
| 水平: 0.016(1σ) | 水平: 0.043(1σ) | 滚转: 1.97(1σ) |
| 高程: 0.031(1σ) | 高程: 0.036(1σ) | 俯仰: 2.52(1σ) |
| 1 | TEUNISSEN P , MONTENBRUCK O . Springer handbook of global navigation satellite systems[M]. Berlin: Springer, 2017. |
| 2 |
HEIN G W . Status, perspectives and trends of satellite navigation[J]. Satellite Navigation, 2020, 1, 22.
doi: 10.1186/s43020-020-00023-x |
| 3 | HOFFMANN H O , WALTON R O . Integration of the ground-based augmentation system in continuous descent operations[J]. Navigation, 2019, 65 (4): 571- 580. |
| 4 |
LEE J S , LEE J Y . Correlation between ionospheric spatial decorrelation and space weather intensity for safety-critical differential GNSS systems[J]. Sensors, 2019, 19 (9): 2127- 2133.
doi: 10.3390/s19092127 |
| 5 | 陈奕宇, 吴苗, 梁益丰. 陆基长波导航定位模式优劣分析[J]. 舰船电子工程, 2019, 39 (12): 58- 60. |
| CHEN Y Y , WU M , LIANG Y F . Analysis and discussion on the advantages and disadvantages of long wave navigation and positioning modes on Land[J]. Ship Electronic Engineering, 2019, 39 (12): 58- 60. | |
| 6 |
KOROGLU M , ARIKAN F . Spatio-temporal analysis of ionospheric disturbances for ground based augmentation systems over a midlatitude region[J]. Advances in Space Research, 2020, 65 (9): 2099- 2118.
doi: 10.1016/j.asr.2019.10.024 |
| 7 |
CHOY S , KUCKARTZ J , DEMPSTER A G , et al. GNSS satellite-based augmentation systems for Australia[J]. GPS Solutions, 2017, 21 (3): 835- 848.
doi: 10.1007/s10291-016-0569-2 |
| 8 |
LI R , ZHENG S Y , WANG E S , et al. Advances in BeiDou navigation satellite system (BDS) and satellite navigation augmentation technologies[J]. Satellite Navigation, 2020, 1, 13.
doi: 10.1186/s43020-020-00015-x |
| 9 | 张羽成, 孙蕊, 马勇, 等. 陆基增强系统在无人机进近着陆中的性能分析[J]. 测绘科学, 2017, 42 (7): 103- 107. |
| ZHANG Y C , SUN R , MA Y , et al. Performance analysis of UAV approach landing based on GBAS[J]. Science of Surveying and Mapping, 2017, 42 (7): 103- 107. | |
| 10 |
GUILBERT A , MILNER C , MACABIAU C . Characterization of tropospheric gradients for the ground-based augmentation system through the use of numerical weather models[J]. Navigation: Journal of the Institute of Navigation, 2017, 64 (4): 475- 493.
doi: 10.1002/navi.205 |
| 11 | SUPRAJA R A , ACHANTA S D . Estimation of overbound on ionospheric spatial decorrelation over low-latitude region for ground-based augmentation systems[J]. IET Radar, Sonar & Navigation, 2016, 10 (3): 637- 645. |
| 12 |
SAITO S , YOSHIHARA T . Evaluation of extreme ionospheric total electron content gradient associated with plasma bubbles for GNSS ground-based augmentation system[J]. Radio Science, 2017, 52 (8): 951- 962.
doi: 10.1002/2017RS006291 |
| 13 |
WANG Z P , WANG S J , ZHU Y B , et al. Assessment of ionospheric gradient impacts on ground-based augmentation system (GBAS) data in Guangdong province, China[J]. Sensors, 2017, 17 (10): 2313.
doi: 10.3390/s17102313 |
| 14 | CROW R P. Combined ground and satellite system for global aircraft surveillance guidance and navigation[P]. U.S. : No. 5, 627, 546. 6, 1997. |
| 15 | PRUM S, HENRY B, MONTALVO A, et al. Combined navigation and mobile communication satellite architecture[P] U.S. : No. 6, 311, 128. 30, 2001. |
| 16 |
RUNGRAENGWAJIAKE S , SUPNITHI P , SAITO S , et al. Ionospheric delay gradient monitoring for GBAS by GPS stations near Suvarnabhumi airport, Thailand[J]. Radio Science, 2015, 50 (10): 1076- 1085.
doi: 10.1002/2015RS005738 |
| 17 | CHEN X, OUYANG C, SHI J. Virtual reference station (VRS) coordinate's pattern of QianXun ground-based augmentation system[C]//Proc. of the China Satellite Navigation Conference, 2018: 285-295. |
| 18 | KRASUSKI K , WIKLAK J . Aircraft positioning using DGNSS technique for GPS and GLONASS data[J]. Sensor Review, 2020, 40 (3): 559- 575. |
| 19 |
CIRCIU M S , FELUX M , PULLEN S . Evaluation of GPS L5 and Galileo E1 and E5a performance for future multi frequency and multi constellation GBAS[J]. Navigation: Journal of the Institute of Navigation, 2017, 64 (1): 149- 163.
doi: 10.1002/navi.181 |
| 20 | 王勋, 王新龙, 车欢, 等. SINS/陆基单站组合导航系统建模与性能仿真验证[J]. 航空兵器, 2016, (6): 55- 60. |
| WANG X , WANG X L , CHE H , et al. Simulation and validation of SINS/land-based single station integrated navigation system[J]. Aero Weaponry, 2016, (6): 55- 60. | |
| 21 | HU G G , GAO B B , ZHONG Y M , et al. Unscented Kalman filter with process noise covariance estimation for vehicular INS/GPS integration system[J]. Information Fusion, 2020, 64 (1): 194- 204. |
| 22 | YAN W, WANG L J, JIN Y F, et al. High accuracy navigation system using GPS and INS system integration strategy[C]//Proc. of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, 2016: 365-369. |
| 23 | BEAUDOIN Y , DESBIENS A , GAGNON E , et al. Observability of satellite launcher navigation with INS, GPS, attitude sensors and reference trajectory[J]. Acta Astronautica, 2018, 142 (1): 277- 288. |
| 24 | RTCA DO-245A. Minimum aviation system performance standards local area augmentation system (LAAS)[S]. Washmgton DC: Radio Technical Commission for Aeronautics, 2004. |
| 25 | 赵铁钢. 基于GNSS信号的对流层建模与延迟误差分析[D]. 哈尔滨: 哈尔滨工业大学, 2011. |
| ZHAO T G. Troposyeric moderling and delay error analysis based on the GNSS signals[D]. Harbin: Harbin Institute of Technology, 2011. | |
| 26 | SHAKER M E , GHAFFARI A , MAGHSOODPOUR A , et al. GPS/INS integration for vehicle navigation based on INS error analysis in Kalman filtering[J]. Automotive Science and Engineering, 2017, 7 (4): 2562- 2570. |
| 27 | GUO Y , WU M P , TANG K H , et al. Covert spoofing algorithm of UAV based on GPS/INS-integrated navigation[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (7): 6557- 6564. |
| 28 | WANG B N, XIANG M S, ZHOU L J, et al. The location model of platform in InSAR/INS integrated navigation system[C]//Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2019. |
| 29 | 黄兵超. GPS/INS组合导航系统研究[D]. 武汉: 国防科学技术大学, 2010. |
| HUANG B C. Research on GPS/INS integrated navigation system[D]. Wuhan: National University of Defense Technology, 2010. | |
| 30 | 王韬. INS/GPS复合制导技术及其在火箭弹中的应用研究[D]. 哈尔滨: 哈尔滨工业大学, 2014. |
| WANG T. Applied research on combined guidance technology in rocket bomb system[D]. Harbin: Harbin Institute of Technology, 2014. |
| [1] | 高威, 李亚峰, 王可东. 信号级GNSS/SINS超紧组合导航仿真平台设计[J]. 系统工程与电子技术, 2023, 45(1): 184-192. |
| [2] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [3] | 王鹏博, 贺成艳, 杨倩倩, 佟文华. 窄带干扰信号对北斗三号B2信号质量的影响[J]. 系统工程与电子技术, 2022, 44(7): 2286-2292. |
| [4] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [5] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| [6] | 付栋, 彭竞, 马明, 陈飞强, 欧钢. 基于钟差检验的GNSS授时欺骗检测与识别[J]. 系统工程与电子技术, 2022, 44(3): 948-955. |
| [7] | 袁赫良, 金天, 曲家庆, 吕红丽. 旋转条件下非连续卫星导航信号处理技术[J]. 系统工程与电子技术, 2021, 43(9): 2573-2580. |
| [8] | 张庆龙, 王玉明, 程二威, 陈亚洲, 马立云. 导航接收机带外电磁干扰的效应规律及预测方法研究[J]. 系统工程与电子技术, 2021, 43(9): 2588-2593. |
| [9] | 孙淑光, 温启新. 基于高程异常补偿的飞机终端区组合导航高度优化算法[J]. 系统工程与电子技术, 2021, 43(9): 2612-2619. |
| [10] | 文者, 卞鸿巍, 马恒, 臧涛. 中低纬度下惯导极区性能模拟测试方法[J]. 系统工程与电子技术, 2021, 43(9): 2620-2627. |
| [11] | 刘睿, 杨志伟, 陈奇东, 廖桂生, 甄卫民. 基于信号传播修正的GNSS干扰源质心定位方法[J]. 系统工程与电子技术, 2021, 43(8): 2083-2089. |
| [12] | 王文益, 龚婧, 王金铭. 基于SCB方差的GNSS欺骗式干扰检测算法[J]. 系统工程与电子技术, 2021, 43(8): 2254-2262. |
| [13] | 苏瑜, 荆文芳, 卢晓春, 张阳. 基于BP-PID控制的载波频率准确度提高算法[J]. 系统工程与电子技术, 2021, 43(7): 1894-1903. |
| [14] | 赵仁杰, 胡柏青, 吕旭, 田佳玉. 基于双欧拉角的UKF组合导航滤波算法[J]. 系统工程与电子技术, 2021, 43(7): 1912-1920. |
| [15] | 蔡保杰, 邵雷. 三段判别域与最小二乘拟合的抗差滤波算法[J]. 系统工程与电子技术, 2021, 43(5): 1346-1353. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||