
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (7): 2329-2338.doi: 10.12305/j.issn.1001-506X.2025.07.25
• 制导、导航与控制 • 上一篇
林思颖1,2, 郁丰1,2,*, 熊智3, 吴方4, 周紫君1,2
收稿日期:2024-03-06
出版日期:2025-07-16
发布日期:2025-07-22
通讯作者:
郁丰
作者简介:林思颖(2000—), 女, 硕士研究生, 主要研究方向为组合导航、集群导航基金资助:Siying LIN1,2, Feng YU1,2,*, Zhi XIONG3, Fang WU4, Zijun ZHOU1,2
Received:2024-03-06
Online:2025-07-16
Published:2025-07-22
Contact:
Feng YU
摘要:
为了提高低成本小型无人机在全球卫星导航系统(global navigation satellite system, GNSS)信号受到干扰时的导航性能, 提出一种基于航姿参考系统(attitude and heading reference system, AHRS)的导航方法。采用AHRS输出的误差有界的姿态信息构建航位推算模型, 在GNSS信号拒止时可有效延缓导航误差的发散; 在GNSS信号有效时, 通过对姿态角的修正进一步提高导航精度。仿真结果显示, 在组合阶段, 所提方法能够进一步提高姿态角精度, 且导航精度与传统惯性导航系统相当; 在拒止阶段, 所提方法的水平和高程的位置精度分别比惯导提高了83.3%和45.9%。最后, 通过半物理试验验证了仿真结果的可靠性。
中图分类号:
林思颖, 郁丰, 熊智, 吴方, 周紫君. 基于AHRS的GNSS间断拒止下低成本无人机导航方法[J]. 系统工程与电子技术, 2025, 47(7): 2329-2338.
Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial[J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338.
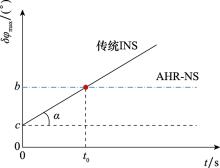
图1
拒止环境下姿态误差曲线"
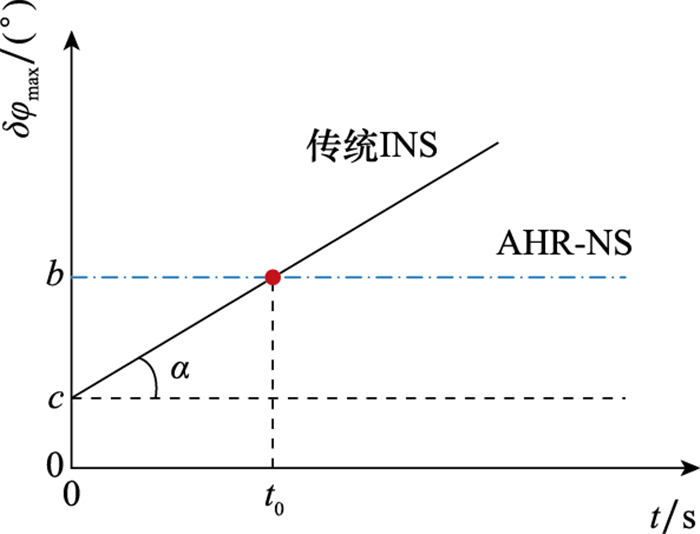
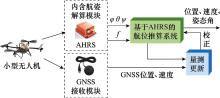
图2
AHR-NS/GNSS组合导航原理图"
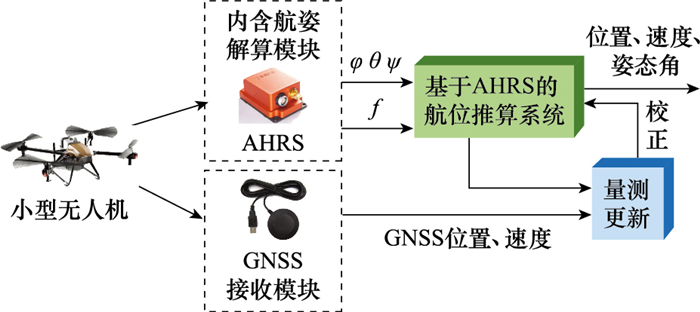
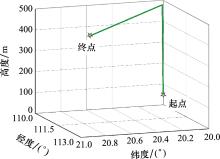
图3
无人机航迹"
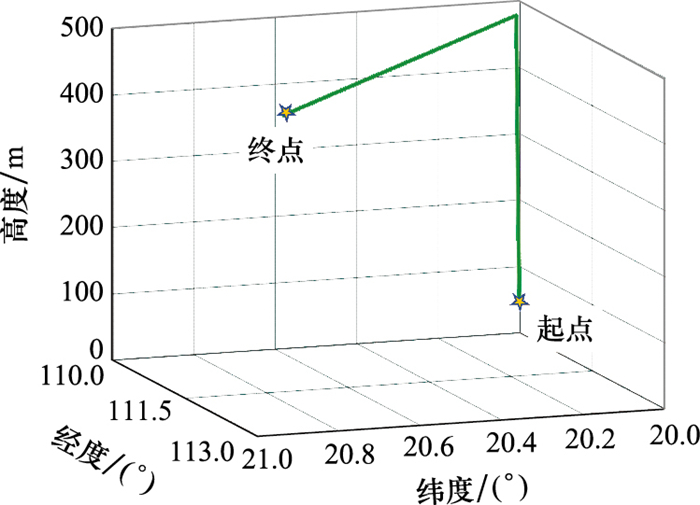
表1
传感器参数"
| 传感器类型 | 误差项 | 数值 |
| 陀螺仪 | 常值漂移/(°/h) | 3.0 |
| 一阶马尔可夫漂移/(°/h) | 6.0 | |
| 相关时间/s | 1 000 | |
| 噪声密度/(°/s/ | 0.007 | |
| 加速度计 | 一阶马尔可夫漂移/(°/h) | 3.8×10-4 |
| 相关时间/s | 800 | |
| AHRS | 俯仰/滚转均方根/(°) | 0.2 |
| 滚转均方根/(°) | 0.2 | |
| 偏航均方根/(°) | 1.0 |
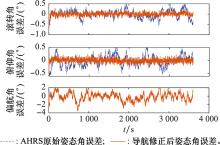
图4
修正前后姿态角误差"
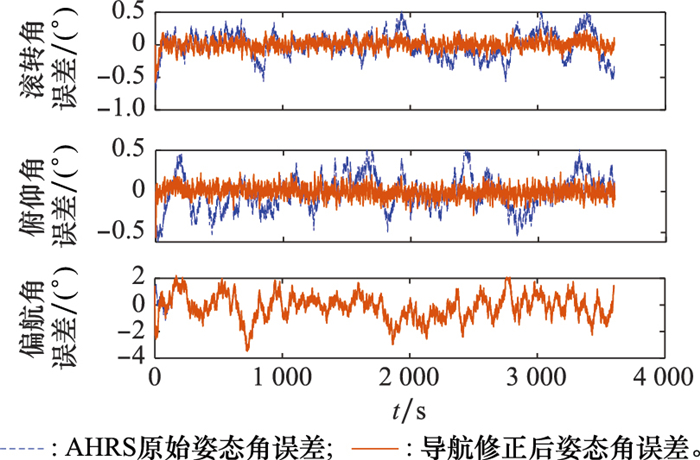
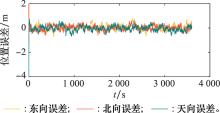
图5
AHR-NS/GNSS位置误差"
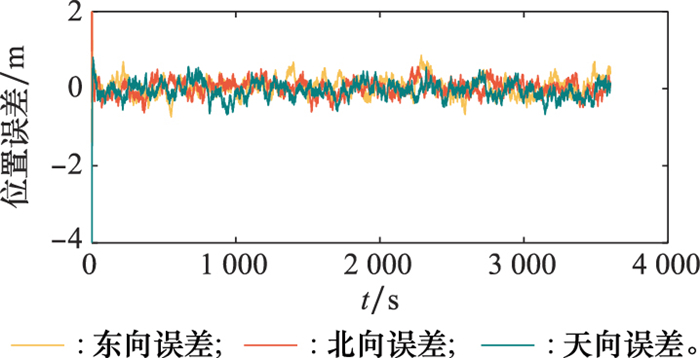
表2
姿态角估计对精度的影响"
| 误差项 | 数值 | ||
| X1(12维) | X2(9维) | ||
| 姿态角误差/(°) | 横滚角 | 0.078 2 | 0.201 2 |
| 俯仰角 | 0.076 4 | 0.214 9 | |
| 偏航角 | 0.929 5 | 0.941 2 | |
| 位置误差/m | 东向 | 0.271 1 | 0.287 2 |
| 北向 | 0.278 9 | 0.311 1 | |
| 天向 | 0.268 5 | 0.275 2 | |
| 速度误差/(m/s) | 东向 | 0.034 3 | 0.050 8 |
| 北向 | 0.035 3 | 0.052 0 | |
| 天向 | 0.012 6 | 0.013 8 | |
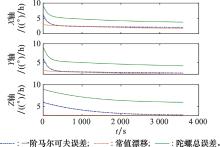
图6
滤波后的陀螺仪误差"
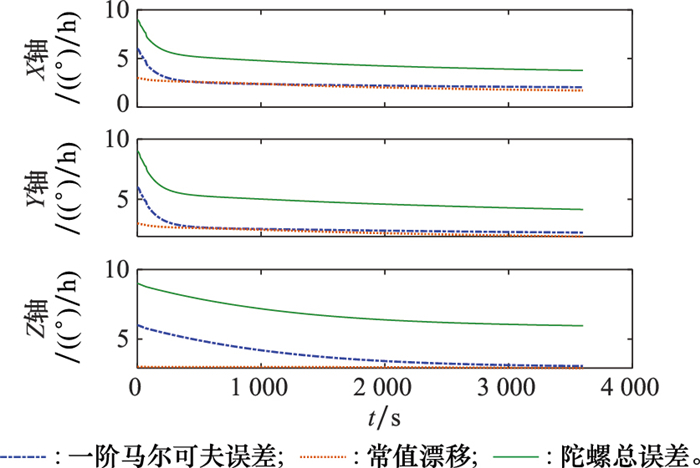
表3
INS/GNSS组合导航结果"
| 误差项 | 数值 | |
| 姿态角RMSE/(°) | 横滚 | 0.028 8 |
| 俯仰 | 0.031 6 | |
| 偏航 | 1.066 7 | |
| 位置RMSE/m | 东向 | 0.286 0 |
| 北向 | 0.287 7 | |
| 天向 | 0.280 1 | |
图7
位置误差对比"
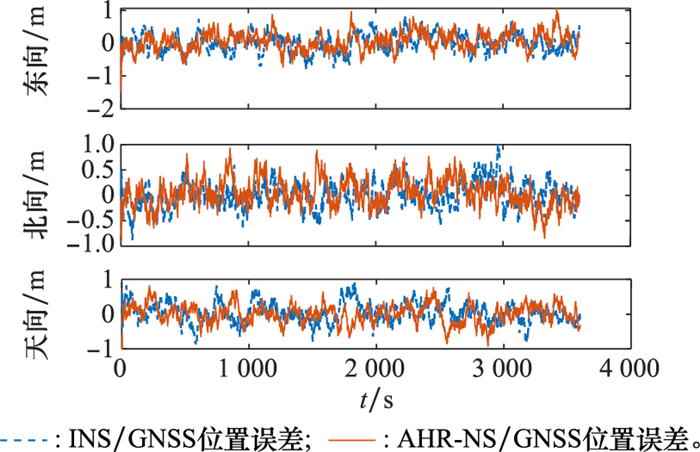
图8
姿态角误差对比"
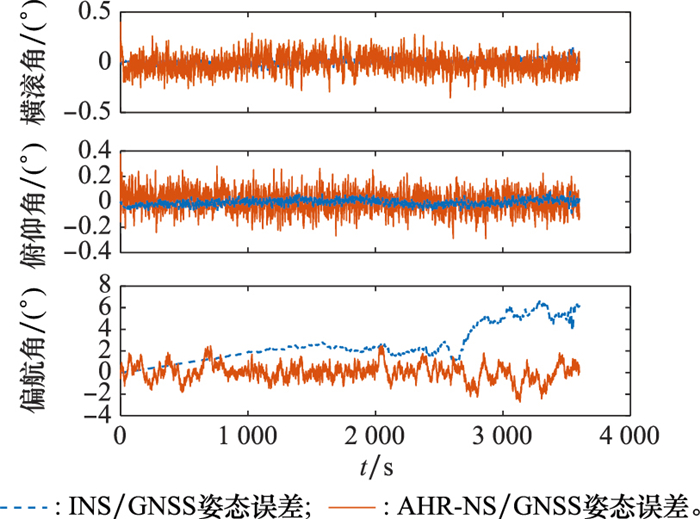
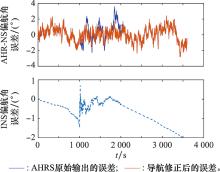
图9
AHR-NS与INS的偏航角误差"
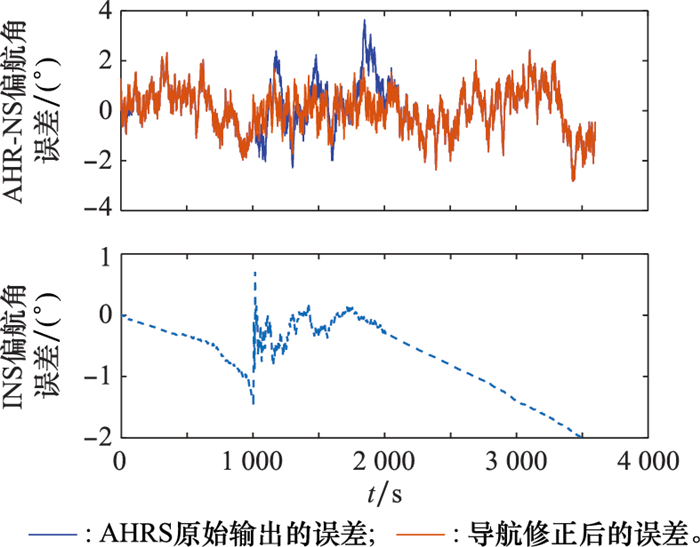
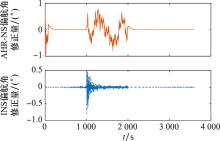
图10
AHR-NS与INS的偏航角修正量"
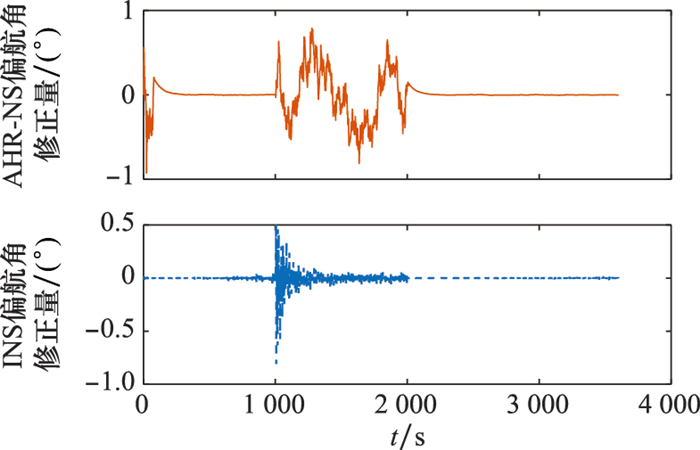
图11
50次仿真的姿态角RMSE"
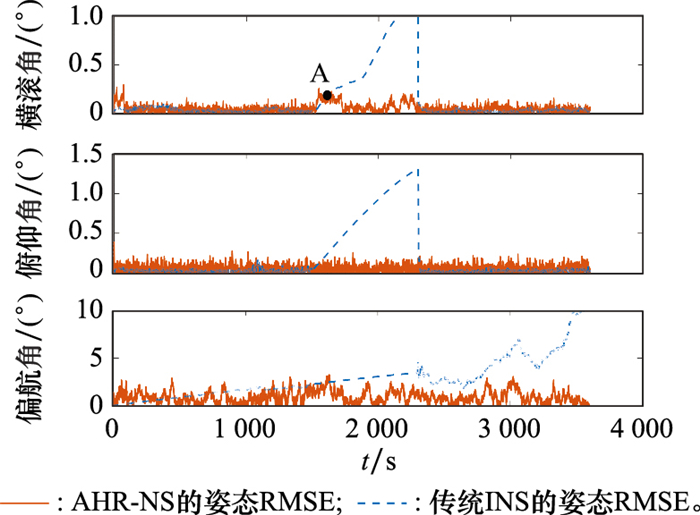
图12
50次仿真的位置RMSE"
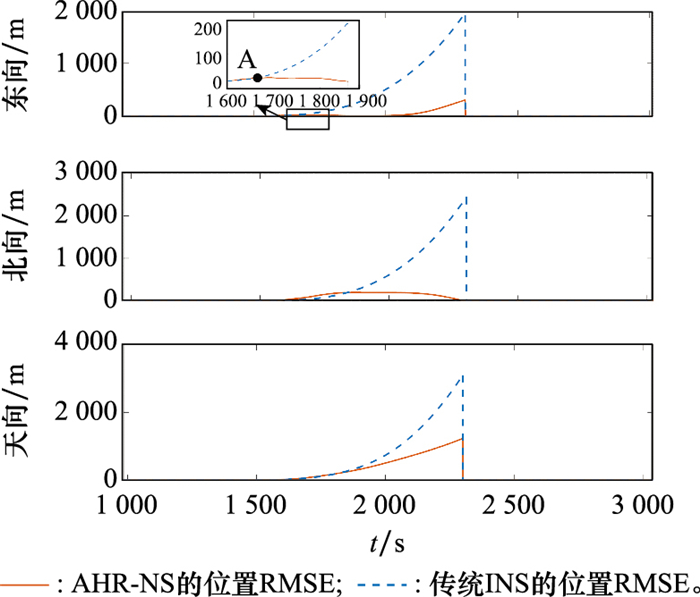
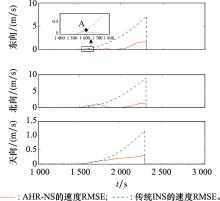
图13
50次仿真的速度RMSE"
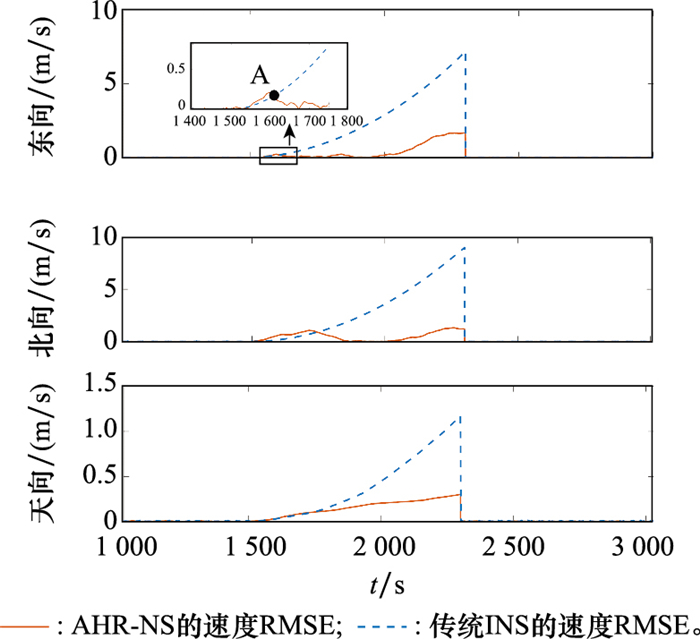

图14
试验设备"
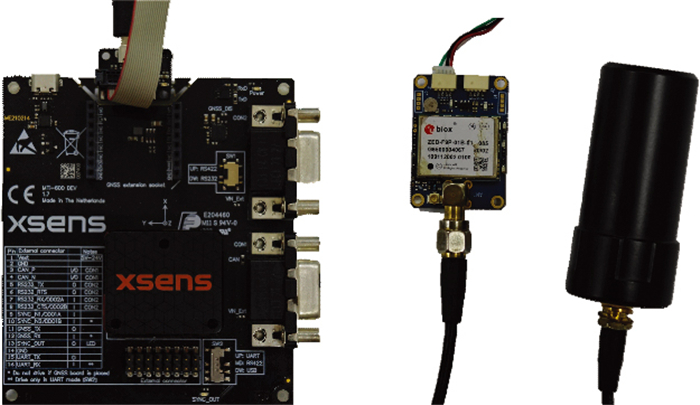

图15
试验轨迹"
图16
导航结果"
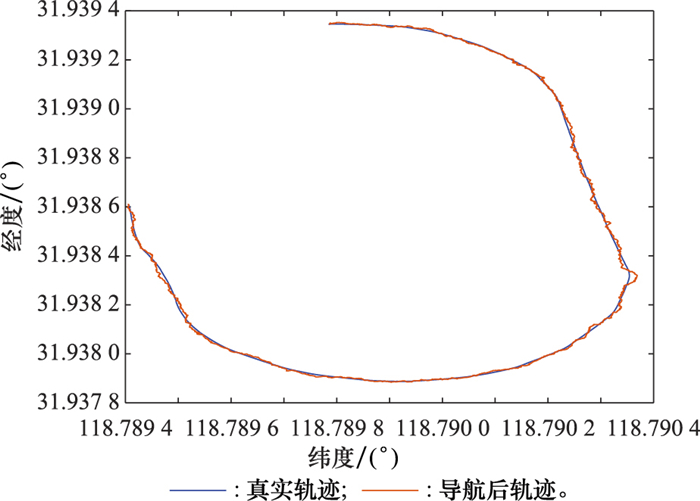
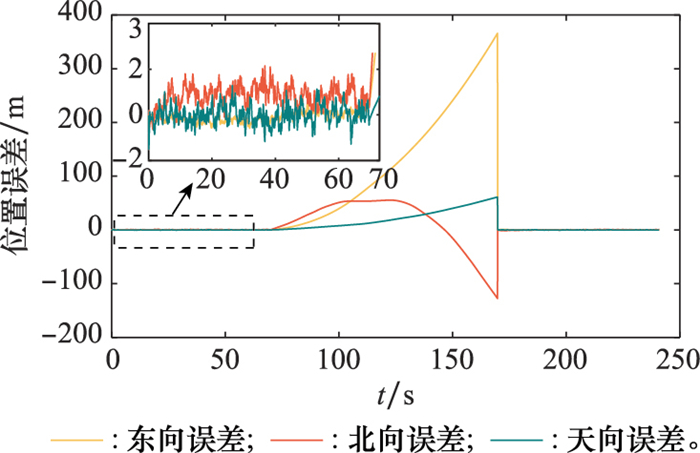
图17
AHR-NS的位置误差"
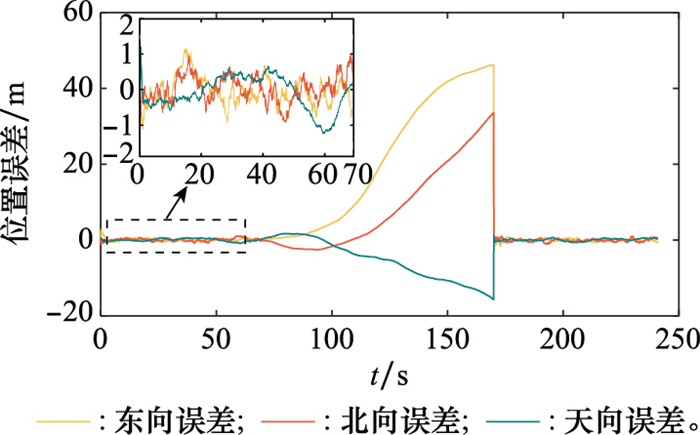
图18
INS的位置误差"
| 23 | 毛红瑛, 陈至坤. 基于MEMS AHRS/GNSS的全组合导航[J]. 网络安全技术与应用, 2021, 246 (6): 128- 130. |
| MAO H Y , CHEN Z K . Fully integrated navigation based on MEMS AHRS/GNSS[J]. Network Security Technology and Application, 2021, 246 (6): 128- 130. | |
| 24 |
常振军, 张志利, 周召发, 等. 捷联惯导行进间对准位置更新与误差分析[J]. 系统工程与电子技术, 2020, 42 (1): 172- 178.
doi: 10.3969/j.issn.1001-506X.2020.01.23 |
|
CHANG Z J , ZHANG Z L , ZHOU Z F , et al. Position updating and error analysis of SINS alignment for moving base[J]. Systems Engineering and Electronics, 2020, 42 (1): 172- 178.
doi: 10.3969/j.issn.1001-506X.2020.01.23 |
|
| 25 | SABET M S , DANIALI H M , FATHI A , et al. A low-cost dead reckoning navigation system for an AUV using a robust AHRS: design and experimental analysis[J]. IEEE Journal of Oceanic Engineering, 2018, 43 (4): 927- 939. |
| 26 |
顾元鑫, 吴文启, 王茂松. 基于MEMS-IMU的动态大失准角STUKF算法[J]. 中国惯性技术学报, 2023, 31 (9): 861- 869.
doi: 10.13695/j.cnki.12-1222/o3.2023.09.002 |
|
GU Y X , WU W Q , WANG M S . STUKF algorithm for MEMS-IMU with large misalignment in dynamic[J]. Journal of Chinese Inertial Technology, 2023, 31 (9): 861- 869.
doi: 10.13695/j.cnki.12-1222/o3.2023.09.002 |
|
| 27 |
戴礼灿, 刘欣, 张海瀛, 等. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J]. 系统工程与电子技术, 2023, 45 (6): 1814- 1820.
doi: 10.12305/j.issn.1001-506X.2023.06.25 |
|
DAI L C , LIU X , ZHANG H Y , et al. Flight target track prediction based on Kalman filter algorithm unfolding[J]. Systems Engineering and Electronics, 2023, 45 (6): 1814- 1820.
doi: 10.12305/j.issn.1001-506X.2023.06.25 |
|
| 28 | 帅平, 陈定昌, 江涌. GPS/SINS组合导航系统状态的可观测度分析方法[J]. 宇航学报, 2004, 25 (2): 219- 224. |
| SHUAI P , CHEN D C , JIANG Y . Observability analysis method of GPS/SINS integrated navigation system state[J]. Journal of Astronautics, 2004, 25 (2): 219- 224. | |
| 1 | 王金龙. 基于MEMS与GPS的微小型航姿系统设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2018. |
| WANG J L. Design and realization of micro attitude heading reference system based on combination of MEMS and GPS[D]. Harbin: Harbin Engineering University, 2018. | |
| 2 | DEBEUNNE C , VIVET D . A review of visual-LiDAR fusion based simultaneous localization and mapping[J]. Sensors, 2020, 20 (7): 2068. |
| 3 |
FRAGOSO A T , LEE C T , MCCOY A S , et al. A seasonally invariant deep transform for visual terrain-relative navigation[J]. Science Robotics, 2021, 6 (55): eabf3320.
doi: 10.1126/scirobotics.abf3320 |
| 4 | SHETTY A , GAO G X . Adaptive covariance estimation of LiDAR-based positioning errors for UAVs[J]. Navigation, 2019, 66 (2): 463- 476. |
| 5 |
付希禹, 孙永荣, 吴玲, 等. 基于BDS/INS紧组合的动对动相对导航算法[J]. 中国惯性技术学报, 2022, 30 (2): 224- 228.
doi: 10.13695/j.cnki.12-1222/o3.2022.02.013 |
|
FU X Y , SUN Y R , WU L , et al. Kinematic-to-kinematic relative navigation algorithm based on BDS/INS tightly coupled[J]. Journal of Chinese Inertial Technology, 2022, 30 (2): 224- 228.
doi: 10.13695/j.cnki.12-1222/o3.2022.02.013 |
|
| 6 | LI Z K , ZAN L , LONG Z . Improved robust Kalman filter for state model errors in GNSS-PPP/MEMS-IMU double state integrated navigation[J]. Advances in Space Research, 2021, 67 (10): 3156- 3168. |
| 7 | RYAN G B , BENJIAMIN E W , ADAM R B . Investigating practical impacts of using single-antenna and dual-antenna GNSS/INS sensors in UAS-LiDAR applications[J]. Sensors, 2021, 21 (16): 5382. |
| 8 | LIU X H , LIU X X , YANG Y , et al. Variational Bayesian-based robust cubature Kalman filter with application on SINS/GPS integrated navigation system[J]. IEEE Sensors Journal, 2022, 22 (1): 489- 500. |
| 9 | FU H P , CHENG Y M . Switching Gaussian-heavy-tailed distribution based robust Gaussian approximate filter for INS/GNSS integration[J]. Journal of the Franklin Institute, 2022, 359 (16): 870- 894. |
| 29 | KAFASH S H , RUTHS J . Relaxation of the greatest common divisor condition for the controllability of bilinear systems[J]. Automatica, 2023, 153, 111048. |
| 30 | 赵耀, 熊智, 田世伟, 等. 基于SAR图像匹配结果可信度评价的INS/SAR自适应Kalman滤波算法[J]. 航空学报, 2019, 40 (8): 216- 227. |
| ZHAO Y , XIONG Z , TIAN S W , et al. INS/SAR adaptive Kalman filtering algorithm based on credibility evaluation of SAR image matching results[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (8): 216- 227. | |
| 10 | KINNARI J , VERDOJA F , KYRKI V . Season-invariant GNSS-denied visual localization for UAVs[J]. IEEE Robotics and Automation Letters, 2022, 7 (4): 10232- 10239. |
| 11 | TANENHAUS M, CARHOUN D, GEIS T, et al. Miniature IMU/INS with optimally fused low drift MEMS gyro and accelero-meters for applications in GPS-denied environments[C]//Proc. of the IEEE/ION Position, Location and Navigation Symposium, 2012. |
| 12 | LUTZ P , MULLER M G , MAIER M , et al. ARDEA—an MAV with skills for future planetary missions[J]. Field Robo-tics, 2020, 37 (4): 515- 551. |
| 13 | GRYTE K, BRYNE T H, ALBRESTEN S M, et al. Field test results of GNSS-denied inertial navigation aided by phased-array radio systems for UAVs[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2019: 1398-1406. |
| 14 |
HIGASHI Y , YAMAZAKI K . Autonomous flight using UWB-based positioning system with optical flow sensors in a GPS-denied environment[J]. Journal of Robotics and Mechatronics, 2023, 35 (2): 328- 337.
doi: 10.20965/jrm.2023.p0328 |
| 15 | SHEN H , ZONG Q , LU H C , et al. A distributed approach for lidar-based relative state estimation of multi-UAV in GPS-denied environments[J]. Chinese Journal of Aeronautics, 2022, 35 (1): 59- 69. |
| 16 | YUAN X , SHMAILY Y S , AHN C K , et al. Tightly-coupled integration of INS and UWB using fixed-lag extended UFIR smoothing for quadrotor localization[J]. IEEE Internet of Things Journal, 2021, 8 (3): 1716- 1727. |
| 17 |
盛汉霖, 张天宏, 刘冬冬. 基于扩展卡尔曼滤波器的低成本航姿系统设计[J]. 系统工程与电子技术, 2013, 35 (10): 2158- 2164.
doi: 10.3969/j.issn.1001-506X.2013.10.23 |
|
SHENG H L , ZHANG T H , LIU D D . Low-cost AHRS design based on extended Kalman filter[J]. Systems Engineering and Electronics, 2013, 35 (10): 2158- 2164.
doi: 10.3969/j.issn.1001-506X.2013.10.23 |
|
| 18 | WANG L , LIU M Y , WANG M F , et al. Attitude calculation of AHRS based on geomagnetic field adaptive correction[J]. Journal of Northwestern Polytechnical University, 2019, 37 (2): 225- 231. |
| 19 | LEE J K , JENO T H . Constrained AHRS Kalman filter to reduce magnetic distortion-induced uncertainty in heading estimation[J]. Journal of Institute of Control, 2018, 24 (5): 431- 437. |
| 20 | YOUN W . Magnetic fault-tolerant navigation filter for a UAV[J]. IEEE Sensors Journal, 2020, 20 (22): 13480- 13490. |
| 21 | ZHANG H M , ZHANG H Q , XU G Y , et al. Attitude anti-interference federal filtering algorithm for MEMS-SINS/GPS/magnetometer/SV integrated navigation system[J]. Measurement and Control, 2020, 53 (2): 46- 60. |
| 22 | KULAKOVA V I, MMARKOV A O, SOKHAREV A Y. SINS/ GNSS aided by autonomous AHRS for a small UAV[C]//Proc. of the European Navigation Conference, 2020. |
| [1] | 张冬, 邢福逸, 徐允鹤, 钱鹏. 基于双模式切换的机载惯性/雷达组合导航方法[J]. 系统工程与电子技术, 2024, 46(8): 2770-2778. |
| [2] | 靳凯迪, 柴洪洲, 宿楚涵. DVL/SINS松紧组合的等价性分析及改进的虚拟波束辅助紧组合算法[J]. 系统工程与电子技术, 2024, 46(6): 2107-2116. |
| [3] | 冷悦, 钟胜. 天文/惯性组合系统中重力扰动补偿方法[J]. 系统工程与电子技术, 2024, 46(4): 1357-1363. |
| [4] | 李新宇, 周召发, 张志利, 郝诗文, 梁哲. 基于SINS/OD失准角观测的垂线偏差测量方法[J]. 系统工程与电子技术, 2024, 46(3): 1067-1074. |
| [5] | 张寿健, 桂明臻. 基于GPR-UKF的天文测角/测速组合导航方法[J]. 系统工程与电子技术, 2024, 46(12): 4183-4191. |
| [6] | 张法桐, 付耀文, 杨威, 张文鹏, 颜上取. 微小型无人机载FMCW SAR宽波束运动补偿算法[J]. 系统工程与电子技术, 2024, 46(10): 3303-3311. |
| [7] | 靳凯迪, 柴洪洲, 宿楚涵, 向民志, 李明. 基于状态变换卡尔曼滤波的DVL/SINS组合导航算法[J]. 系统工程与电子技术, 2023, 45(11): 3624-3631. |
| [8] | 唐洪琼, 许江宁, 史文策, 何泓洋, 李方能. 基于位置观测信息的Davenport四元数DVL标定方法[J]. 系统工程与电子技术, 2023, 45(11): 3640-3648. |
| [9] | 朱天高, 刘勇, 李开龙, 赵仁杰. 基于欧拉角的李群捷联惯导误差模型分析与比较研究[J]. 系统工程与电子技术, 2023, 45(10): 3265-3273. |
| [10] | 高利春, 高铭阳, 陈晓芳, 饶建兵, 费泽松, 倪少杰. 基于SINS/GBAS组合导航的高精度进近着陆导航技术[J]. 系统工程与电子技术, 2023, 45(1): 210-220. |
| [11] | 姜颖颖, 潘树国, 叶飞, 高旺, 马春, 王浩. 基于抗差估计和改进AIME的缓变故障检测方法[J]. 系统工程与电子技术, 2022, 44(9): 2894-2902. |
| [12] | 董一平, 刘宁, 苏中, 王靖骁, 白宏阳. 基于AEKF的高速自旋飞行体组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1977-1983. |
| [13] | 李文华, 汪立新, 沈强, 李灿, 吴宗收. 基于鲁棒EKF的MEMS-INS/GNSS/VO组合导航方法[J]. 系统工程与电子技术, 2022, 44(6): 1994-2000. |
| [14] | 吴志鹏, 张平, 李震, 黄磊, 刘畅, 高硕. 基于轻小型无人机雷达的植被高度反演方法[J]. 系统工程与电子技术, 2022, 44(12): 3667-3675. |
| [15] | 孙淑光, 温启新. 基于高程异常补偿的飞机终端区组合导航高度优化算法[J]. 系统工程与电子技术, 2021, 43(9): 2612-2619. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||