

0 引言
目前, 关于雷达无人机检测性能分析的公开文献较少, 但关于雷达目标检测性能分析的公开文献较多。鉴于外场试验耗费高、代价大、试验难以重复等问题, 国内外通常采用理论分析与仿真实验或者实测数据处理相结合的方式分析雷达目标检测性能[8-15]。这方面的研究工作主要分为两类: 一是采用经验模型对雷达接收信号进行统计建模, 然后理论推导得到雷达目标检测性能[8-10]; 二是结合实测数据对雷达接收信号统计分布进行拟合, 然后根据拟合模型分析雷达目标检测性能[11-13]。对于这两类分析方法, 雷达目标检测性能分析结果均与雷达接收信号模型息息相关[16-18]。因此, 杂波分布模型和杂波+目标回波分布模型的精确度直接决定了雷达目标检测性能分析结果的精度。其中, 杂波分布模型的精确度决定了雷达检测门限的精度, 进而影响雷达目标检测性能分析结果的精度, 所以杂波分布建模至关重要。
本文结合雷达探测固定翼无人机外场实测数据, 对雷达杂波拖尾导致的虚警概率分布进行建模, 在此基础上插值获得雷达检测门限。然后, 再根据实测杂波+无人机回波幅度分布, 理论推导得到雷达无人机检测性能。本文结合实测数据将基于杂波拖尾的雷达无人机检测性能分析结果与传统性能分析结果(先根据杂波幅度全部取值的统计分布获取检测门限, 再根据实测杂波与无人机回波叠加信号的幅度分布, 推导雷达无人机检测性能)进行对比, 结果表明, 基于杂波拖尾的雷达无人机检测性能分析结果精度显著提高。
1 雷达回波幅度分布
雷达接收信号x可表示为
式中: H0、H1分别表示无人机不存在和存在; s和c分别表示无人机回波和杂波。
实际雷达系统通常采用接收信号的幅度或者功率作为检验统计量来判断目标是否存在。不失一般性, 本文采用雷达接收信号幅度作为检验统计量。令z=|x|, 则雷达虚警概率Pf和检测概率Pd[24]分别可表示为
式中: f(z|H0)和f(z|H1)分别表示H0和H1条件下雷达接收信号幅度的概率密度函数; η为检测门限。在虚警概率恒定的情况下, 为了计算检测门限, 需先获得f(z|H0)。在获得检测门限和f(z|H1)后, 即可计算雷达对无人机的检测概率。下面结合雷达探测无人机外场实测数据分析杂波、无人机回波+杂波的幅度分布特性。
1.1 杂波幅度分布
本文采用的杂波实测数据为某雷达开展无人机外场探测试验时录取的杂波数据, 试验场景详见文献[7]。雷达工作中心频率为9.4 GHz, 发射信号为线性调频信号, 带宽为5 MHz, 脉冲重复周期为1.25 ms, 采样率为10 MHz, 极化方式为HH极化。雷达实测回波数据经过脉冲压缩之后的回波幅度如图 1所示。该数据为一个1 200×400的数组, 其中1 200表示脉冲数, 400表示距离向采样点数, 每个采样点对应的距离为15 m,无人机目标位于第250~255个距离向采样点。本文选取第101~240、261~320列的数据来统计杂波幅度分布, 选取杂波数据组成一个1 200×200矩阵, 杂波样本数据共240 000个。
图1
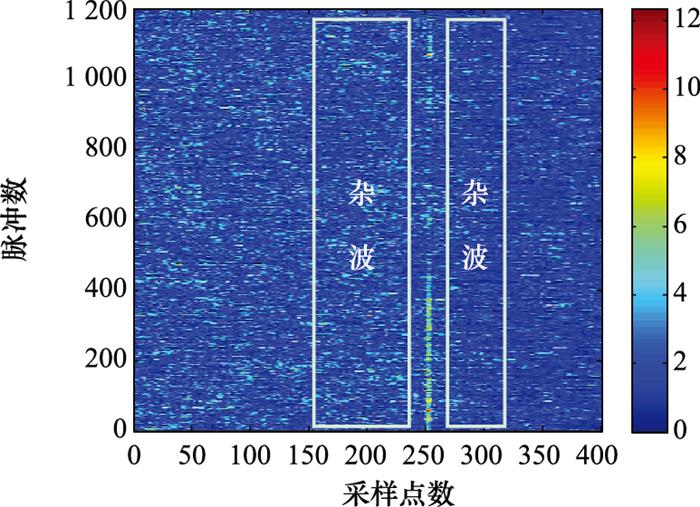
图1
雷达探测无人机脉压输出信号幅度
Fig.1
Radar detection of unmanned aerial vehicle pulse compression output signal amplitude
在用经典分布对杂波幅度分布进行拟合之前, 首先需根据实测数据估计各经典分布的关键参数, 各经典分布概率密度函数及其关键参数估计方法如表 1所示。其中, 关键参数估计主要采用矩估计方法[27], m(1)、m(2)分别表示一、二阶矩, interp表示插值运算, 其功能与仿真软件中的interp1函数功能一样, Γ(·)表示Gamma函数[28], 表达式为
表1 各种经典分布概率密度函数及其关键参数估计方法
Table 1
| 分布 | 概率密度函数 | 关键参数估计 |
| 瑞利分布 | ||
| 对数正态分布 | ||
| 韦布尔分布 | ||
| 伽马分布 | ||
| K分布 |
图2

表2 杂波幅度分布拟合效果
Table 2
| 分布 | N=50 | N=100 | N=500 | |||||
| 拟合度 | 最大拟合误差 | 拟合度 | 最大拟合误差 | 拟合度 | 最大拟合误差 | |||
| 瑞利分布 | 0.51 | 0.16 | 0.34 | 0.13 | 3e-7 | 0.18 | ||
| 对数正态分布 | 0.24 | 0.2 | 0.02 | 0.21 | 1e-10 | 0.22 | ||
| 韦布尔分布 | 0.99 | 0.06 | 0.79 | 0.09 | 3e-7 | 0.18 | ||
| 伽马分布 | 0.68 | 0.14 | 0.34 | 0.13 | 3e-7 | 0.18 | ||
| K分布 | 0.95 | 0.1 | 0.79 | 0.09 | 3e-7 | 0.18 | ||
式中: Fr(x)和Ff(x)分别表示实际数据和拟合分布的累积分布函数。
1.2 无人机回波+杂波幅度分布
图3

图3
无人机回波+杂波幅度分布拟合结果
Fig.3
Fitting results of unmanned aerial vehicle echo plus clutter amplitude distribution
同样, 采用KS检验对各种经典分布的拟合效果进行检验, 信号幅度取值区间分段数分别为50、100、500, KS检验结果如表 3所示。
表3 无人机回波+杂波幅度分布拟合结果
Table 3
| 分布 | N=50 | N=100 | N=500 | |||||
| 拟合度 | 最大拟合误差 | 拟合度 | 最大拟合误差 | 拟合度 | 最大拟合误差 | |||
| 瑞利分布 | 0.68 | 0.14 | 0.14 | 0.16 | 5.4e-14 | 0.25 | ||
| 对数正态分布 | 0.84 | 0.12 | 0.14 | 0.16 | 5.4e-14 | 0.25 | ||
| 韦布尔分布 | 0.99 | 0.08 | 0.68 | 0.1 | 5.4e-14 | 0.25 | ||
| 伽马分布 | 0.95 | 0.1 | 0.56 | 0.11 | 5.4e-14 | 0.25 | ||
| K分布 | 0.99 | 0.08 | 0.68 | 0.1 | 5.4e-14 | 0.25 | ||
2 虚警概率拖尾建模
根据第2节的实测杂波数据分析结果, 杂波幅度服从韦布尔分布, 此时雷达虚警概率可表示为
式中: b为尺度参数, 与杂波功率有关; c为形状参数, 与杂波起伏剧烈程度有关。雷达虚警概率随检测门限的变化曲线如图 4所示。虽然第2.1节分析表明,韦布尔分布对所选择的杂波数据统计分布拟合效果最好, 但从图 4中可以看出, 当虚警概率低于10-3时, 通过式(4)反推得到的检测门限与实际检测门限之间存在误差, 且随着虚警概率的降低, 误差逐渐增大。这是由于韦布尔分布对实测杂波拖尾拟合效果较差导致。在实际中, 雷达系统虚警概率往往要远低于10-3。这种情况下, 基于传统的杂波幅度全部取值分布建模得到检测门限存在较大误差, 这会导致雷达无人机检测性能分析结果产生较大误差。若要提高雷达检测性能分析精度, 需要提高检测门限估计精度, 即需要对杂波拖尾分布(或者图 4中的虚警概率拖尾)进行高精度拟合建模。
图4
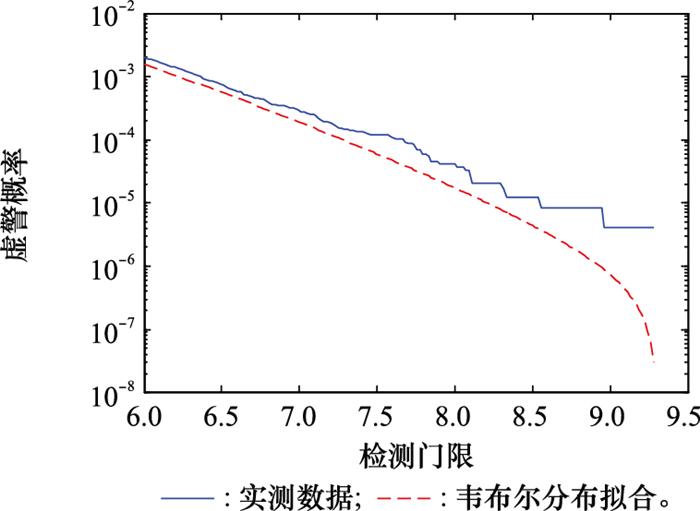
图5
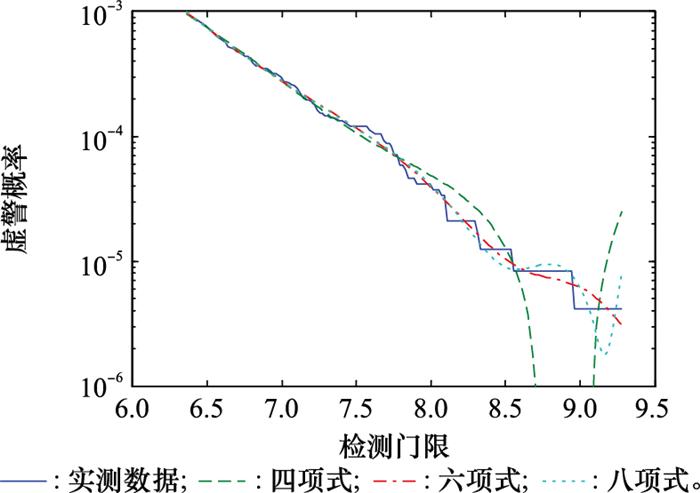
图5
雷达虚警概率多项式拟合结果
Fig.5
Polynomial fitting results for radar false alarm probability
拟合时, 采用线性最小均方估计准则对虚警概率拖尾进行多项式拟合, 拟合模型为
式中: N为多项式阶数。在拟合过程中, 依次增加多项式阶数。当拟合出的虚警概率为负时, 直接舍去该阶多项式。随着多项式阶数的增加, 计算量逐渐增大, 而拟合改善效果越来越小。为此, 在拟合时, 需权衡计算量和拟合效果, 综合选定多项式阶数。对于所选实测杂波数据, 三项式、四项式、五项式拟合的虚警概率均存在负值情况, 因此不采用; 六项式和八项式拟合效果较好, 二者拟合效果差异甚微, 如图 5所示。采用KS检验对图 5中的四、六、八项式的拟合效果进行检验, 四、六、八项式的拟合度分别为0.02、0.3、0.15, 最大拟合误差分布为0.16、0.1、0.13。可见, 六项式拟合度最高, 且最大拟合误差最小。为此, 选取六项式对虚警概率拖尾进行建模。
3 检测性能分析对比
基于传统的杂波全部幅度取值分布建模方法分析雷达检测性能时, 根据式(4)可得检测门限
式中: b1和c1分别为H1假设下韦布尔分布的尺度参数和形状参数。
基于虚警概率多项式拟合方法分析得到的雷达理论检测概率为
式中: ηp=interp(Pf′, z, Pf), interp表示插值运算, Pf′=
设ηr为根据实测数据和给定虚警概率得到的实际检测门限, 则雷达实际检测概率为
图6
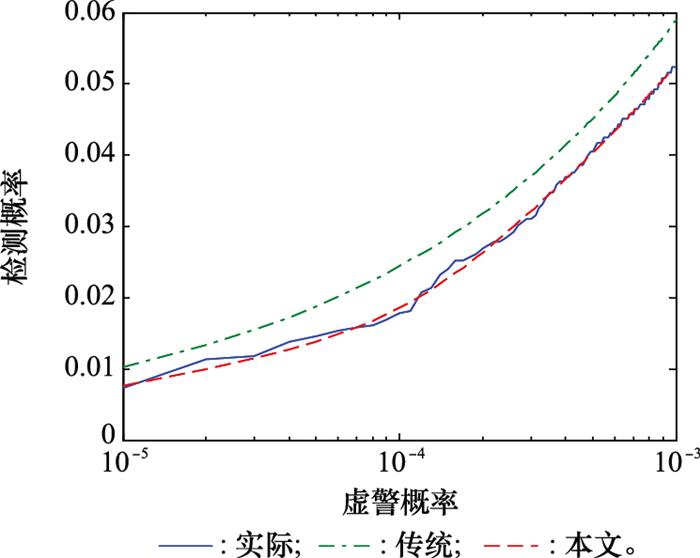
图6
基于实测数据的雷达检测性能对比图
Fig.6
Comparison of radar detection performance with experimental data
由式(6)~式(8)可见, 雷达检测概率计算精度不仅与门限估计精度有关, 还与b1、c1等参数有关。实际中, 随着无人机与雷达之间距离的变化, SCR会发生改变, b1、c1也会随之改变。为此, 不同c1取值条件下采用3种方法计算得到的雷达检测概率随虚警概率、SCR的变化关系如图 7所示。其中, c1描述了无人机回波+杂波幅度起伏剧烈程度, 在计算检测概率时, c1确定后, b1=
图7
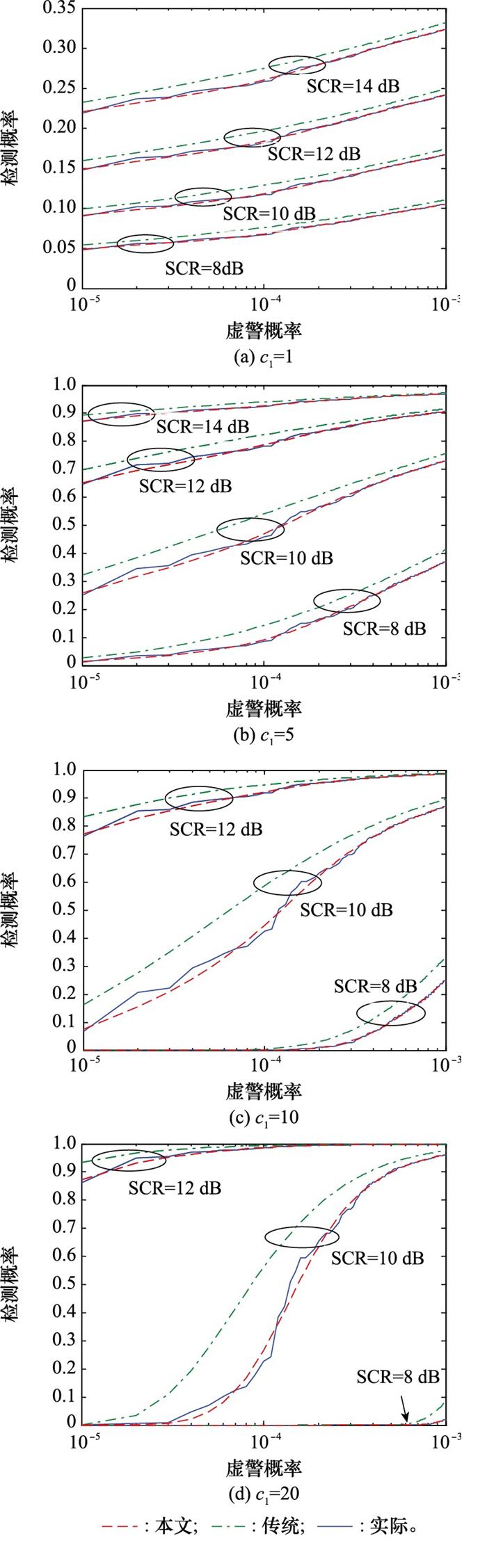
图 7表明, 采用多项式拟合杂波拖尾导致的虚警概率时, 分析得到的检测概率误差明显小于传统的杂波幅度分布全段拟合对应的检测概率误差。随着SCR、信号起伏程度的变化, 多项式拟合方法对应的检测概率误差均较小。对于SCR高于12 dB或者低于8 dB的目标, 采用多项式拟合虚警概率拖尾对应的预估误差可忽略。虽然多项式拟合方法对应的雷达检测概率误差在SCR为10 dB左右时有所增大, 但此误差绝对值仍明显小于传统分析方法对应的检测概率误差绝对值。可见, 采用多项式对杂波幅度拖尾导致的虚警概率进行单独建模, 并据此获得雷达检测门限, 可保证雷达检测性能分析结果具有较高的精度。
4 结论
杂波幅度分布全段拟合建模在杂波拖尾部分往往存在较大误差, 这会使实际雷达系统检测门限计算存在较大误差, 最终导致雷达目标检测性能分析精度不高。对此, 本文提出了采用多项式对杂波拖尾导致的虚警率拖尾进行单独拟合建模的方法。在此基础上, 计算检测门限, 分析雷达检测性能。雷达外场探测无人机试验数据分析结果表明,对杂波拖尾导致的虚警概率采用多项式拟合建模, 由此获得的雷达检测门限较精确, 雷达无人机检测性能分析结果精度明显高于传统方法。
值得一提的是, 实际雷达系统的虚警率通常很低, 雷达检测门限的设置与杂波幅度拖尾分布直接相关, 因此在杂波幅度分布建模时可重点对杂波拖尾部分进行建模。本文采用多项式对虚警概率进行拟合建模的思路同样适用于杂波幅度拖尾建模。
参考文献
Coherent track-before-detect with micro-Doppler signature estimation in array radars
[J].
Extraction of global and local micro-Doppler signature features from FMCW radar returns for UAV detection
[J].DOI:10.1109/TAES.2020.3034020 [本文引用: 1]
Experimental analysis of fully polarimetric radar returns of a fixed-wing UAV
[J].DOI:10.1049/iet-rsn.2019.0312 [本文引用: 1]
The extraction of micro-Doppler signal with EMD algorithm for radar-based small UAVs' detection
[J].
UAV detection and localization based on multi-dimensional signal features
[J].
基于时频检测与极化匹配的雷达无人机检测方法
[J].
Radar detection of unmanned aerial vehicles based on time-frequency detection and polarization matching
[J].
Performance prediction of the incoherent detector for a Weibull fluctuating target
[J].DOI:10.1109/TAES.2014.130040 [本文引用: 2]
Highly accurate closed-form approximation for the probability of detection of Weibull fluctuating targets in noncoherent detectors
[J].
Performance analysis of radar detection for correlated gamma fluctuating targets in K distributed sea clutter
[J].
Experimental performance analysis of distributed target coherent radar detectors
[J].DOI:10.1109/TAES.2012.6237589 [本文引用: 1]
Non-coherent radar detection performance in medium grazing angle X-band sea clutter
[J].
Practical approach to radar detection performance for NCI system
[J].
Performance prediction for coherent noise radars using the correlation coefficient
[J].DOI:10.1109/ACCESS.2021.3135292
Model for non-Gaussian sea clutter amplitudes using generalized inverse Gaussian texture
[J].DOI:10.1109/LGRS.2018.2886782 [本文引用: 1]
Optimum and near-optimum coherent CFAR detection of radar targets in compound-Gaussian clutter with generalized inverse Gaussian texture
[J].DOI:10.1109/TAES.2021.3120045 [本文引用: 1]
A statistical model based on modified generalized-K distribution for sea clutter
[J].
Performance analysis of radar detection for correlated gamma fluctuating targets in K distributed sea clutter
[J].DOI:10.1016/j.dsp.2018.05.001 [本文引用: 1]
海杂波特性认知研究进展与展望
[J].
Overview and prospects of research on sea clutter property cognition
[J].
基于数值仿真的X波段极化SAR海杂波统计建模与特性分析
[J].
Statistical modeling and characteristic analysis of polarimetric SAR sea clutter at X-band based on numerical simulations
[J].
Modeling the statistics of microwave radar sea clutter
[J].
Statistical analysis of measured polarimetric clutter data at different range resolutions
[J].
Statistical distribution of polarization ratio for radar sea clutter
[J].DOI:10.1002/2017RS006371 [本文引用: 1]
High resolution radar clutter statistics
[J].DOI:10.1109/7.745679 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}