Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (7): 2456-2464.doi: 10.12305/j.issn.1001-506X.2024.07.27
• Guidance, Navigation and Control • Previous Articles
Motion stability analysis of fin-controlled small supercavitating vehicle
Ping YAN1, Chaochang LI1,2,*
- 1. College of Ordnance Engineering, Naval University of Engineering, Wuhan 430033, China
2. Technology Center, Wuhan Marine Machinery Plant Company Limited, Wuhan 430084, China
-
Received:2023-08-31Online:2024-06-28Published:2024-07-02 -
Contact:Chaochang LI
CLC Number:
Cite this article
Ping YAN, Chaochang LI. Motion stability analysis of fin-controlled small supercavitating vehicle[J]. Systems Engineering and Electronics, 2024, 46(7): 2456-2464.
share this article

Fig.1
Schematic diagram of geometric structure of supercavitating vehicle"


Fig.2
Schematic diagram of vehicle fin section"


Fig.3
Schematic diagram of longitudinal motion model of supercavitating vehicle"

Table 1
Parameter values of supercavitating vehicle model"
| 参数名称 | 取值 |
| 重力加速度g/(m/s2) | 9.8 |
| 质量M/g | 113.9 |
| 航行体半径R/m | 0.007 25 |
| 航行体长度L/m | 0.154 |
| 阻力系数cx0 | 0.065 |
| 转动惯量Izz/(g·mm3) | 4 766.412 |
| 空化数σ | [0.001 1, 0.010 0] |
| 密度比(航行体/水)m | 7.9 |

Fig.4
Dynamic characteristics of the system (kz=40, σ=0.001 1)"

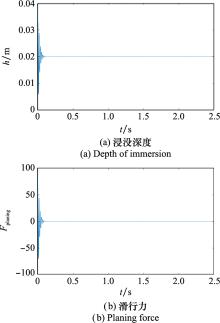
Fig.5
Hydrodynamic characteristics of vehicle fin (kz=40, σ=0.001 1)"


Fig.6
Time domain diagram of depth and pitch angle (kz=40, σ=0.001 1)"


Fig.7
Dynamic characteristics of the system (kθ=20, σ=0.01)"


Fig.8
Hydrodynamic characteristics of vehicle fin (kz=20, σ=0.01)"


Fig.9
Time domain diagram of depth and pitch angle (kz=20, σ=0.1)"


Fig.10
Lyapunov exponent spectrum (kz=80, σ=0.01)"


Fig.11
Phase trajectory diagram of system"

Table 2
Influence of kz on system state"
| σ | V/(m/s) | kz | 系统状态 |
| 0.001 1 | 600 | [30, 59] | 稳定 |
| [-26, -17];[12, 29] | 周期振荡 | ||
| [68, 86] | 混沌 | ||
| 其他 | 发散 | ||
| 0.002 5 | 400 | [28, 60] | 稳定 |
| [-29, -14];[9, 27] | 周期振荡 | ||
| [62, 85] | 混沌 | ||
| 其他 | 发散 | ||
| 0.01 | 200 | [26, 63] | 稳定 |
| [-30, -12];[10, 25] | 周期振荡 | ||
| [51, 86] | 混沌 | ||
| 其他 | 发散 |
Table 3
Influence of kθ on system state"
| σ | V/(m/s) | kθ | 系统状态 |
| 0.001 1 | 600 | [-9, -6] | 稳定 |
| [-15, -9] | 周期振荡 | ||
| 其他 | 发散 | ||
| 0.002 5 | 400 | [-4, -1] | 稳定 |
| [-18, -8] | 周期振荡 | ||
| 其他 | 发散 | ||
| 0.01 | 200 | [-6, -2] | 稳定 |
| [-14, -7];[5, 52] | 周期振荡 | ||
| 其他 | 发散 |
Table 4
Influence of kq on system state"
| σ | V/(m/s) | kq | 系统状态 |
| 0.001 1 | 600 | [12, 19] | 稳定 |
| [-16, -7];[20, 39] | 周期振荡 | ||
| 其他 | 发散 | ||
| 0.002 5 | 400 | [16, 23] | 稳定 |
| [-26, -17];[24, 38] | 周期振荡 | ||
| 其他 | 发散 | ||
| 0.01 | 200 | [16, 27] | 稳定 |
| [-18, -9];[28, 39] | 周期振荡 | ||
| 其他 | 发散 |
| 1 |
HUAN C , GUO K , QIN K X , et al. Hydrodynamic characteristics and supercavity shape of supercavitating projectiles launched with supersonic speed[J]. Journal of Marine Science and Application, 2022, 21 (2): 24- 33.
doi: 10.1007/s11804-022-00262-1 |
| 2 | LI X , YAN P , TAN B , et al. Numerical simulation of dynamic response of underwater supercavitating projectile structure based on after-effect enhancement of kinetic penetration[J]. Journal of Physics Conference Series, 2020, 15 (7): 32- 55. |
| 3 | 祁晓斌, 姚忠, 李瑞杰, 等. 超空泡技术在反潜作战中的应用设想[J]. 数字海洋与水下攻防, 2022, 5 (2): 109- 114. |
| QI X B , YAO Z , LI R J , et al. Application of supercavitation technology in anti-submarine warfare[J]. Digital Ocean and Underwater Attack and Defense, 2022, 5 (2): 109- 114. | |
| 4 | SAVCHENKO Y N . Control of supercavitation flow and stability of supercavitating motion of bodies[J]. VKI Special Course on Supercavitating Flows. Brussels: RTO2AVT and VKI, 2001, 19 (3): 313- 341. |
| 5 |
HUANG C , LIU Z , LIU Z X , et al. Motion characteristics of high-speed supercavitating projectiles including structural deformation[J]. Energies, 2022, 15 (5): 1933.
doi: 10.3390/en15051933 |
| 6 | MENG Q C , ZHANG Z H , GU J N , et al. Analysis and calculation for tail-slaps of supercavitating projectiles[J]. Explosion and Shock Waves, 2009, 29 (1): 25- 60. |
| 7 | MIRZAEI M , TANGHVAEI H . Heading control of a novel finless high-speed supercavitating vehicle with an internal oscillating pendulum[J]. Journal of Vibration and Control, 2021, 27 (15/16): 1765- 1777. |
| 8 | 陈伟善. 高速超空泡射弹尾拍运动特性数值研究[D]. 南京: 南京理工大学, 2020. |
| CHEN W S. Numerical study on the motion characteristics of the tail-slap of the high-speed supercavitating projectile[D]. Nanjing: Nanjing University of Science and Technology, 2020. | |
| 9 | ZOU W , LIU T X , SHI Y K , et al. Analysis of motion characteristics of a controllable ventilated supercavitating vehicle under accelerations[J]. Journal of Fluids Engineering: Transactions of the ASME, 2021, 143 (11): 143- 148. |
| 10 | MOKHTARZADEH H. Supercavitating vehicle modeling and dynamics for control[D]. Minneapolis: University of Minnesota, 2010. |
| 11 | NGUYEN V , BALACHANDRAN B . Supercavitating vehicle maneuvering with delay and non-steady planing[J]. Прикладна гiдромеханiка, 2013, 15 (1): 62- 74. |
| 12 | NGUYEN V, HASSOUNEH M A, BALACHANDRAN B, et al. Non-steady planing and advection delay effects on the dynamics and control of supercavitating vehicles[C]//Proc. of the ASME International Mechanical Engineering Congress and Exposition, 2011: 775-781. |
| 13 | DZIELSKI J , KURDILA A . A benchmark control problem for supercavitating vehicles and an initial investigation of solutions[J]. Vibration & Control, 2003, 9 (7): 791- 804. |
| 14 | BAI X , LI Q L , XU M . Nonlinear dynamics and control of time-delay supercavitating vehicle[J]. International Journal of Bifurcation and Chaos in Applied Sciences and Engineering, 2022, 32 (2): 14- 25. |
| 15 | ZHEN H , PANG A P , WANG J H , et al. Modeling and analy- sis for underwater high-speed supercavitaing torpedo[J]. Journal of System Simulation, 2018, 30 (8): 3092- 3097. |
| 16 |
PHUC B D H , YOU S S , DOAN P T , et al. Adaptive controller design for dynamic maneuvers of high-speed under-water vehicles[J]. China Ocean Engineering, 2022, 36 (2): 311- 321.
doi: 10.1007/s13344-022-0027-6 |
| 17 | DUC B , PHUC B D H , YOU S S , et al. Dynamical analysis and robust control for dive plane of supercavitating vehicles[J]. Applied Ocean Research, 2019, 84 (1): 259- 267. |
| 18 | HUNG B M , YOU S S , PHUC B D H , et al. Motion control with robust string stability of mobile-rack vehicles in autonomous logistics[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 13 (3): 2347- 2359. |
| 19 | HAN Y T , XU Z , GUO H . Robust predictive control of a supercavitating vehicle based on time-delay characteristics and parameter uncertainty[J]. Ocean Engineering, 2021, 36 (2): 311- 321. |
| 20 | LI Y, LIU M Y, ZHANG X J, et al. Adaptive backstepping variable structure control for incomplete-encapsulated supercavi- tating vehicles[C]//Proc. of the IEEE Oceans, 2016. |
| 21 | SHI S M , MENG F Y , BAI M H , et al. The stability analysis using Lyapunov exponents for high-DOF nonlinear vehicle plane motion[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236 (7): 1390- 1400. |
| 22 | ZHAO X H , ZHANG X Y , YE X F , et al. Sliding mode controller design for supercavitating vehicles[J]. Ocean Engineering, 2019, 7 (15): 173- 183. |
| 23 | ZHAO X H , SUN Y , ZHAO G L , et al. μ-synthesis robust controller design for the supercavitating vehicle based on the BTT strategy[J]. Ocean Engineering, 2014, 88 (15): 280- 288. |
| 24 | LYU Y P , XIONG T H , et al. Research on the numerical simulation of the nonlinear dynamics of a supercavitating vehicle[J]. Shock & Vibration, 2016, 8 (26): 71- 80. |
| 25 | 吕一品, 吴锦涛, 李向林, 等. 水下超空泡航行体的多稳态运动[J]. 舰船科学技术, 2022, 44 (3): 25- 30. |
| LYU Y P , WU J T , LI X L , et al. Multistable motion of underwater supercavitating vehicle[J]. Ship Science and Techno-logy, 2022, 44 (3): 25- 30. | |
| 26 | 吕一品. 超空泡航行体非线性动力学特性与运动稳定性研究[D]. 南京: 南京理工大学, 2019. |
| LYU Y P. Study on nonlinear dynamic characteristics and motion stability of supercavitating vehicle[D]. Nanjing: Nanjing University of Science and Technology, 2019. | |
| 27 | 王京华, 魏英杰, 于开平, 等. 基于空泡记忆效应的水下超空泡航行体建模与控制[J]. 振动与冲击, 2010, 29 (8): 160- 163. |
| WANG J H , WEI Y J , YU K P , et al. Modeling and control of underwater supercavitating vehicle based on cavitation memory effect[J]. Vibration and Shock, 2010, 29 (8): 160- 163. | |
| 28 | MOKHTARZADEH H , BALAS G , ARNDT R . Effect of cavi- tator on supercavitating vehicle dynamics[J]. IEEE Journal of Oceanic Engineering, 2012, 37 (2): 156- 165. |
| 29 | LI Z W . Numerical study of the pitching motions of supercavitating vehicles[J]. Journal of Hydrodynamics, 2012, 24 (6): 951- 958. |
| 30 | LI C H , WANG C , WANG W , et al. The shape and pressure characteristics of ventilated supercavity in longitudinal plane rotation motion[J]. Journal of Harbin Institute of Technology, 2019, 51 (10): 22- 29. |
| 31 | ZHEN H , PANG A P , WANG J H , et al. Modeling and ana-lysis for underwater high-speed supercavitaing torpedo[J]. Journal of System Simulation, 2019, 30 (8): 3092- 3097. |
| [1] | Ningyun LU, Yang LI, Bin JIANG, Shoujin HUANG, Kun MA. Overview of design of testability and dot based fault diagnosis strategy for complex systems [J]. Systems Engineering and Electronics, 2024, 46(7): 2359-2373. |
| [2] | Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU. Design of trajectory tracking model predictive control scheme in terrain following [J]. Systems Engineering and Electronics, 2024, 46(4): 1383-1392. |
| [3] | Liang ZHANG, Si LIU, Kangwei ZHAO, Cunming HU. Parameters design and stability margin analysis of adaptive augmenting control for launch vehicle [J]. Systems Engineering and Electronics, 2024, 46(1): 271-279. |
| [4] | Xu CHEN, Yao XIAO, Lingyu YANG, Jing ZHANG. Stability analysis of radome parasitic loop based on simplified model [J]. Systems Engineering and Electronics, 2023, 45(6): 1784-1796. |
| [5] | Zehong DONG, Yinghui LI, Maolong LYU, Zhe LI, Binbin PEI. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints [J]. Systems Engineering and Electronics, 2023, 45(5): 1476-1488. |
| [6] | Jinlin ZHANG, Jiong LI, Humin LEI, Wanli LI, Xiao TANG. Capture region of 3D realistic true proportional navigation with finite overload [J]. Systems Engineering and Electronics, 2022, 44(3): 986-997. |
| [7] | Zhiming ZHOU, Zhen LIU, Jianqiang YI, Xiaoxian YAO. Stability of missile damping loop under actuator dynamic response [J]. Systems Engineering and Electronics, 2022, 44(10): 3200-3206. |
| [8] | Mingjie SUN, Lin ZHOU, Yunlong YU, Jinling GU. Ant colony optimization based polymorphism-aware routing algorithm for AdHoc UAV network [J]. Systems Engineering and Electronics, 2021, 43(9): 2562-2572. |
| [9] | Yuyao ZHAI, Xianjun SHI, Jiapeng LYU, Lu HAN. Modeling and index evaluation of multi-level testability of missiles based on GSPN [J]. Systems Engineering and Electronics, 2021, 43(4): 970-979. |
| [10] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [11] | Shuai LIU, Guorong ZHAO, Bin ZENG, Chao GAO. Moving horizon estimation for uncertain systems with packet dropouts and quantization [J]. Systems Engineering and Electronics, 2020, 42(4): 912-918. |
| [12] | Yaqi CUI, Wei XIONG, Xiangqi GU. Anti-bias association algorithm for marine target track based on triangular stability [J]. Systems Engineering and Electronics, 2020, 42(10): 2223-2230. |
| [13] | YE Wen, LV Xinyi, LV Xiaofeng, MA Ling. Optimized test selection method considering critical faults [J]. Systems Engineering and Electronics, 2019, 41(7): 1583-1589. |
| [14] | ZHOU Kui, SUN Shiyan, YAN Ping. Bayes method for determining fault sample size based on posterior risk [J]. Systems Engineering and Electronics, 2019, 41(7): 1672-1676. |
| [15] | YANG Xinyan, LIAO Yurong, NI Shuyan. Rapid piecewise power reaching law of sliding mode control design and analysis [J]. Systems Engineering and Electronics, 2019, 41(5): 1127-1132. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||