Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (3): 1021-1030.doi: 10.12305/j.issn.1001-506X.2024.03.28
• Guidance, Navigation and Control • Previous Articles Next Articles
Distributed model predictive energy-saving control of UAVs formation with fuzzy constraints
Wenkang HAO, Qifeng CHEN
- School of Automation, Central South University, Changsha 410083, China
-
Received:2022-12-02Online:2024-02-29Published:2024-03-08 -
Contact:Qifeng CHEN
CLC Number:
Cite this article
Wenkang HAO, Qifeng CHEN. Distributed model predictive energy-saving control of UAVs formation with fuzzy constraints[J]. Systems Engineering and Electronics, 2024, 46(3): 1021-1030.
share this article

Fig.1
Schematic diagram of formation flight"


Fig.2
Membership function of variables"

Table 1
Fuzzy rule of yaw angle command error Ψec"
| eΨ | ey | ||||||
| NB | NM | NS | Z | PS | PM | PB | |
| NB | NB | NS | NS | PS | PM | PB | PB |
| NM | NB | NM | NS | PS | PS | PM | PB |
| NS | NB | NM | NS | Z | PS | PM | PB |
| Z | NB | NM | NS | Z | PS | PM | PB |
| PS | NB | NM | NS | Z | PS | PM | PB |
| PM | NB | NM | NS | NS | PS | PM | PB |
| PB | NB | NB | NM | NS | PS | PS | PB |
Table 2
Fuzzy rule of speed command error Vec"
| ev | ex | ||||||
| PB | NB | NM | NS | Z | PS | PM | |
| NB | NB | NM | NM | PS | PB | PB | PB |
| NM | NB | NM | NM | PS | PB | PB | PB |
| NS | NB | NM | NS | Z | PM | PM | PB |
| Z | NB | NM | NS | Z | PS | PM | PB |
| PS | NB | NM | NM | Z | PS | PM | PB |
| PM | NB | NB | NB | NS | PM | PM | PB |
| PB | NB | NB | NB | NS | PM | PM | PB |

Fig.3
Fuzzy constraints of yaw angle command"

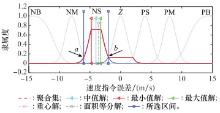
Fig.4
Fuzzy constraints of speed command"

Table 3
Initial conditions of unmanned aerial vehicles"
| 序号 | 位置/m | 速度/(m/s) | 航向角 | 期望位置/m |
| UAV0 | (0, 0) | 35 | π/2 | - |
| UAV1 | (0, 230) | 35 | π/2 | (0, 200) |
| UAV2 | (240, 10) | 35 | π/2 | (190, 61) |
| UAV3 | (-340, 150) | 35 | π/2 | (-190, 61) |
| UAV4 | (40, 180) | 35 | π/2 | (117, -161) |
| UAV5 | (-320, -260) | 35 | π/2 | (-117, -161) |

Fig.5
Flight trace generated by DMPC algorithm"


Fig.6
Flight trace generated by DMPC algorithm with fuzzy constraints"


Fig.7
Trajectory of unmanned aerial vehicles states"


Fig.8
Change trajectory of energy consumption"


Fig.9
Samples location for LHS"


Fig.10
Diagrams of difference between the results of two control methods"

Table 4
Statistical of simulation results"
| 指标和对象 | 最小差值 | 最大差值 | 平均差值 | 差值大于0的比例/% | DMPC的标准差 | 模糊约束DMPC的标准差 |
| 飞行路程(编队) | 1.12 | 229.00 | 75.67 | 100 | - | - |
| 角度变化累计值(编队) | 0.07 | 4.20 | 1.38 | 100 | 1.29 | 0.75 |
| 速度变化累计值(编队) | 5.33 | 153.57 | 57.68 | 100 | 33.45 | 18.55 |
| 能量损耗(编队) | 3.7×105 | 2.75×106 | 1.28×106 | 100 | - | - |
| 飞行路程(单机) | -0.75 | 127.74 | 15.13 | 94.64 | - | - |
| 角度变化累计值(单机) | -0.14 | 1.41 | 0.28 | 93.06 | 0.59 | 0.34 |
| 速度变化累计值(单机) | -6.71 | 49.27 | 11.53 | 79.50 | 15.20 | 8.34 |
| 能量损耗(单机) | -42.23 | 9.59×105 | 2.57×105 | 99.80 | - | - |
| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41 (4): 20- 45. |
| WANG X K , LIU Z H , CONG Y R , et al. Miniature fixed wing UAV swarms: review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (4): 20- 45. | |
| 2 | 牛轶峰, 刘天晴, 李杰, 等. 密集环境中无人机协同机动飞行运动规划方法综述[J]. 国防科技大学学报, 2022, 44 (4): 1- 12. |
| NIU Y F , LIU T Q , LI J , et al. Review on motion planning methods for unmanned aerial vehicle cooperative maneuvering flight in cluttered environment[J]. Journal of National University of Defense Technology, 2022, 44 (4): 1- 12. | |
| 3 |
ZOU Y , PAGILLA P R , RATLIFF R T . Distributed formation flight control using constraint forces[J]. Journal of Guidance, Control, and Dynamics, 2009, 32 (1): 112- 120.
doi: 10.2514/1.36826 |
| 4 |
CAI Z H , WANG L H , ZHAO J , et al. Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs[J]. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056.
doi: 10.1016/j.cja.2019.07.016 |
| 5 | ZHANG J D, WANG W Y, ZHANG Z, et al. Cooperative control of UAV cluster formation based on distributed consensus[C]//Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 788-793. |
| 6 |
KADA B , KHALID M , SHAIKH M S . Distributed cooperative control of autonomous multi-agent UAV systems using smooth control[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307.
doi: 10.23919/JSEE.2020.000100 |
| 7 |
SATTIGERI R , CALISE A J , EVERS J H . An adaptive vision-based approach to decentralized formation control[J]. Journal of Aerospace Computing, Information, and Communication, 2004, 1 (12): 502- 525.
doi: 10.2514/1.12925 |
| 8 | GALZI D, SHTESSEL Y. UAV formations control using high order sliding modes[C]//Proc. of the IEEE American Control Conference, 2006: 1025-1032. |
| 9 | ROJO-RODRIGUEZ E G, OLLERVIDES E J, ZAMBRANO-ROBLEDO P, et al. A fuzzy gain scheduling control algorithm for formation flight of multi-UAVs[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2019: 712-720. |
| 10 | ZHOU C, LEI M, ZHOU S L, et al. Collision-free UAV formation flight control based on nonlinear MPC[C]//Proc. of the IEEE International Conference on Electronics, Communications and Control, 2011: 1951-1956. |
| 11 | 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37 (7): 1763- 1771. |
| ZHAO C L , DAI S W , ZHAO G R , et al. Formation control of multi-UAV based on distributed model predictive control algorithm[J]. Control and Decision, 2022, 37 (7): 1763- 1771. | |
| 12 |
DUNBAR W B , MURRAY R M . Distributed receding horizon control for multi-vehicle formation stabilization[J]. Automatica, 2006, 42 (4): 549- 558.
doi: 10.1016/j.automatica.2005.12.008 |
| 13 |
CAMPONOGARA E , JIA D , KROGH B H , et al. Distributed model predictive control[J]. IEEE Control Systems Magazine, 2002, 22 (1): 44- 52.
doi: 10.1109/37.980246 |
| 14 |
ZHANG B Y , SUN X X , LIU S G , et al. Adaptive differential evolution-based distributed model predictive control for multi-UAV formation flight[J]. International Journal of Aeronautical and Space Sciences, 2020, 21 (2): 538- 548.
doi: 10.1007/s42405-019-00228-8 |
| 15 |
WEI S B , CHAI Y , DING B C . Distributed model predictive control for multiagent systems with improved consistency[J]. Journal of Control Theory and Applications, 2010, 8 (1): 117- 122.
doi: 10.1007/s11768-010-9181-0 |
| 16 | ZHOU S L, KANG Y H, ZHOU C, et al. Research on MPC formation control algorithm based on centralized-distributed information interactive strategy[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 324-331. |
| 17 |
HU X X , LIU Y H , WANG G D . Optimal search for moving targets with sensing capabilities using multiple UAVs[J]. Journal of Systems Engineering and Electronics, 2017, 28 (3): 526- 535.
doi: 10.21629/JSEE.2017.03.12 |
| 18 |
GRAFE A , EICKHOFF J , TRIMPE S . Event-triggered and distributed model predictive control for guaranteed collision avoidance in UAV swarms[J]. IFAC-PapersOnLine, 2022, 55 (13): 79- 84.
doi: 10.1016/j.ifacol.2022.07.239 |
| 19 | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44 (9): 2840- 2848. |
| SUN T Y , SUN W , WU J J . UAV formation rapid assembly method based on improved Quatre algorithm[J]. Systems Engineering and Electronics, 2022, 44 (9): 2840- 2848. | |
| 20 |
CHEN J X , LI J M , YUAN X X . Global fuzzy adaptive consensus control of unknown nonlinear multiagent systems[J]. IEEE Trans.on Fuzzy Systems, 2020, 28 (3): 510- 522.
doi: 10.1109/TFUZZ.2019.2908771 |
| 21 | ROJO-RODRIGUEZ E G, OLLERVIDES E J, ZAMBRANO-ROBLEDO P, et al. A fuzzy gain scheduling control algorithm for formation flight of multi-UAVs[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2019: 712-720. |
| 22 | REZAEE H, ABDOLLAHI F, MENHAJ M B. Model-free fuzzy leader-follower formation control of fixed wing UAVs[C]//Proc. of the IEEE 13th Iranian Conference on Fuzzy Systems, 2013. |
| 23 | XU B, JIAO M Y, ZHANG D L. Design of close formation controller for UAVs based on fuzzy PID rule[C]//Proc. of the IEEE Chinese Automation Congress, 2020: 444-449. |
| 24 |
TRAN V P , SANTOSO F , GARRATT M A , et al. Distributed formation control using fuzzy self-tuning of strictly negative imaginary consensus controllers in aerial robotics[J]. IEEE-ASME Trans.on Mechatronics, 2021, 26 (5): 2306- 2315.
doi: 10.1109/TMECH.2020.3036829 |
| 25 | 魏英杰, 毕凤阳, 张嘉钟, 等. 时滞时变AUV的模糊变结构控制[J]. 系统工程与电子技术, 2009, 31 (8): 1949-1952, 2023. |
| WEI Y J , BI F Y , ZHANG J Z , et al. Fuzzy sliding mode controller for time-delay and time-varying autonomous underwater vehicles[J]. Journal of Systems Engineering and Electronics, 2009, 31 (8): 1949-1952, 2023. | |
| 26 | 吴正平, 邓聪, 文海. 模糊线性/非线性自抗扰切换控制及其应用[J]. 航空学报, 2021, 42 (9): 473- 480. |
| WU Z P , DENG C , WEN H . Fuzzy linear/nonlinear active disturbance rejection switching control and its application[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (9): 473- 480. | |
| 27 | MACIEJONSKI J . Predictive control with constraints[M]. New Jersey: Prentice Hall, 1999. |
| 28 | RAWLINGS J B , MAYNE D Q , DIEHL M . Model predictive control: theory, computation, and design[M]. 2nd ed. San Francisco: Nob Hill Publishing, 2020. |
| 29 | BEARD R W , MCLAIN T W . Small unmanned aircraft: theory and practice[M]. Princeton and Oxford: Princeton University Press, 2012: 164- 165. |
| 30 |
YAN H , CHEN Y , YANG S H . New energy consumption model for rotary-wing UAV propulsion[J]. IEEE Wireless Communications Letters, 2021, 10 (9): 2009- 2012.
doi: 10.1109/LWC.2021.3090772 |
| [1] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [2] | Runnan QIN, Xiaodong PENG, Wenming XIE, Jianjiang HUI, Weichun FENG, Jiahong JIANG. Design of publish/subscribe system for big-data security transmission of spacecraft [J]. Systems Engineering and Electronics, 2024, 46(3): 963-971. |
| [3] | Shuxin HU, An ZHANG, Manyi SUN, Minghao LI. Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC [J]. Systems Engineering and Electronics, 2024, 46(2): 658-667. |
| [4] | Yuang ZHU, Yali ZHAO, Jialuan HE, Chenguang ZHANG, Chaojun WU, Xiaoxiao JIA. Topology discovery method for mobile communication systems based on distributed SDN [J]. Systems Engineering and Electronics, 2024, 46(1): 357-365. |
| [5] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [6] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [7] | Zengmao CHEN, Kailin WANG, Zhiguo SUN, Rongchen SUN, Sileng AER. Eigenvalue difference spectrum sensing algorithm under Alpha stable distributed noise [J]. Systems Engineering and Electronics, 2023, 45(9): 2949-2955. |
| [8] | Wenbo LIU, Yirong YAO, Gong ZHANG, Wen HU. Concept, application, and research progress of hyperdimensional computing [J]. Systems Engineering and Electronics, 2023, 45(7): 1938-1956. |
| [9] | Yuhang HAO, Wei JIANG, Zengfu WANG, Hua LAN, Ting YONG, Quan PAN. Distributed MIMO sky-wave over-the-horizon-radar simulation system [J]. Systems Engineering and Electronics, 2023, 45(7): 1981-1989. |
| [10] | Hanyu QIAN, Xiaoman TIAN, Bing XIAO, Lu CAO, Rui WANG, Xiwei WU. Balanced task allocation method for distributed satellite swarm game [J]. Systems Engineering and Electronics, 2023, 45(6): 1797-1804. |
| [11] | Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm [J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004. |
| [12] | Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot [J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605. |
| [13] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [14] | Taiyang HU, Jinyu ZHANG, Hailiang LU, Pengfei LI, Yinan LI, Rongchuan LYU. Distributed synthetic aperture microwave radiometric high-resolution imaging algorithm based on data fusion [J]. Systems Engineering and Electronics, 2022, 44(8): 2403-2409. |
| [15] | Lin SUN, Zhongyang MAO, Jiafang KANG, Lei ZHANG. Energy efficiency maximization-based spectrum allocation algorithm for maritime relay communication system [J]. Systems Engineering and Electronics, 2022, 44(8): 2661-2667. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||