Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (2): 658-667.doi: 10.12305/j.issn.1001-506X.2024.02.29
• Guidance, Navigation and Control • Previous Articles
Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC
Shuxin HU, An ZHANG, Manyi SUN, Minghao LI
- College of Aeronautics, Northwestern Polytechnical University, Xi'an 710072, China
-
Received:2022-12-14Online:2024-01-25Published:2024-02-06 -
Contact:Shuxin HU
CLC Number:
Cite this article
Shuxin HU, An ZHANG, Manyi SUN, Minghao LI. Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC[J]. Systems Engineering and Electronics, 2024, 46(2): 658-667.
share this article

Fig.1
Structure diagram of quadrotor unmanned aerial vehicle"

Table 1
Definition of control inputs and status symbols"
| 符号 | 变量名称 | 符号 | 变量名称 | |
| x, y, z/m | 位置 | p, q/(rad/s) | 角速率 | |
| u, v, w/(m/s) | 速度 | m/kg | 质量 | |
| ϕ/rad | 滚转角 | g/(m/s2) | 重力加速度 | |
| θ/rad | 俯仰角 | τθ, τϕ/(N·m) | 力矩 | |
| Ixx, Iyy/(kg·m2) | 转动惯量 | ftotal/N | 推力 |

Fig.2
Description of formation control problem"


Fig.3
Formation control solution's framework"


Fig.4
Principle of MPC"


Fig.5
Formation communication network's structure"

Table 2
Obstacles information"
| xobs | yobs | robs |
| -1.5 | -2.0 | 1.0 |
| -4.0 | -3.0 | 1.5 |

Fig.6
S-MPC planning trajectory with different γ parameters"


Fig.7
Calculation time of each iteration of S-MPC with different γ parameters"


Fig.8
Average calculation time of S-MPC with different γ parameters"

Table 3
Impact of parameter γ"
| γ | 最小距离 | 控制输入代价 |
| 0.1 | 4.683 6 | 8.796 5 |
| 0.2 | 3.623 7 | 8.730 4 |
| 0.5 | 3.048 8 | 9.078 5 |
| 1.0 | 2.733 3 | 8.820 4 |

Fig.9
S-MPC planning trajectory with different Np parameters"


Fig.10
Calculation time of each iteration of S-MPC with different Np parameters"


Fig.11
Average calculation time of S-MPC with different Np parameters"


Fig.12
S-MPC planning trajectory"


Fig.13
S-MPC and APF planning trajectories"
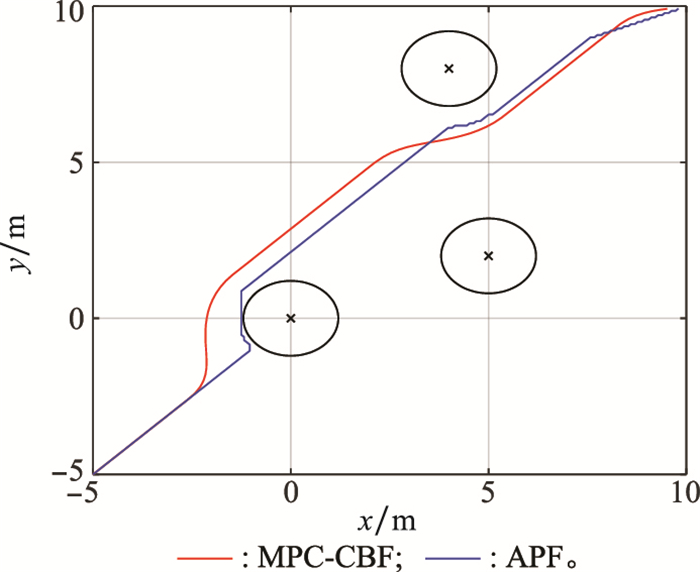

Fig.14
Structure of formation communication topology"

Table 4
Initial state of unmanned aerial vehicle m"
| 无人机 | x | y |
| UAV1 | -4 | -1.5 |
| UAV2 | -7 | -2.0 |
| UAV3 | -3 | -6.0 |
| UAV4 | -6 | -5.5 |
| UAV5 | -5 | -5.0 |

Fig.15
Unmanned aerial vehicle formation flying trajectory"


Fig.16
Position tracking consistency for unmanned aerial vehicle formation system"


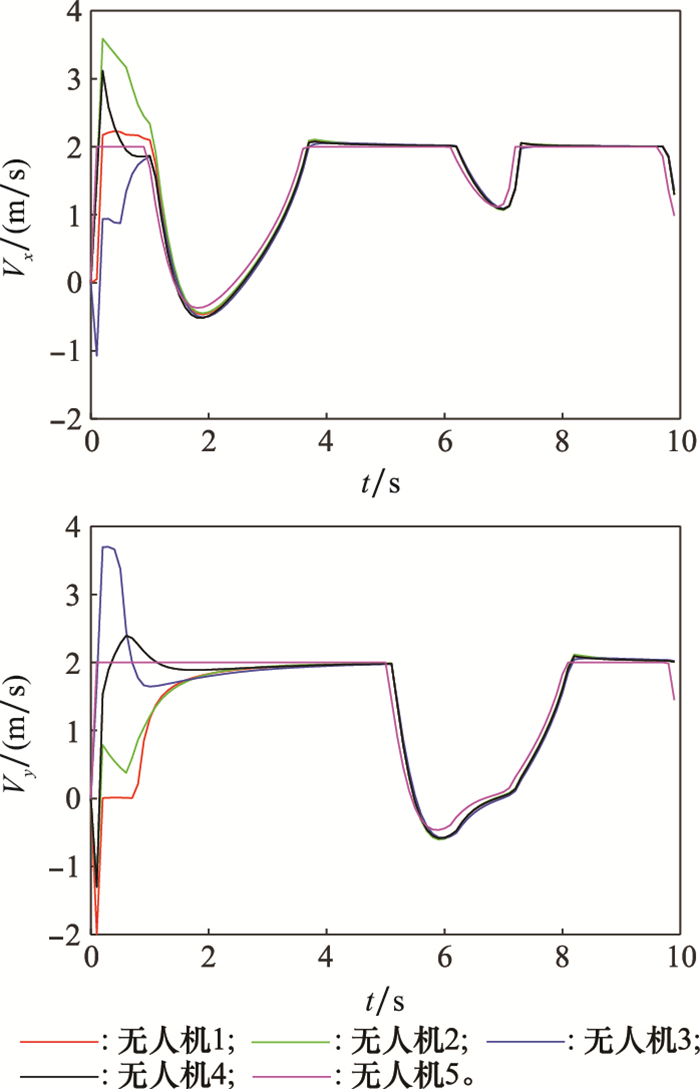
Fig.17
Velocity tracking consistency for unmanned aerial vehicle formation system"
| 1 |
REZAEE H , ABDOLLAHI F . A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots[J]. IEEE Trans.on Industrial Electronics, 2014, 61 (1): 347- 354.
doi: 10.1109/TIE.2013.2245612 |
| 2 | RANJBAR-SAHRAEI B , SHABANINIA F , NEMATI A , et al. A novel robust decentralized adaptive fuzzy control for swarm formation of multiagent systems[J]. IEEE Trans.on Industrial Electronics, 2016, 59 (8): 3124- 3134. |
| 3 |
OH K K , PARK M C , AHN H S . A survey of multi-agent formation control[J]. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 4 | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44 (9): 2840- 2848. |
| SUN T Y , SUN W , WU J J . UAV formation rapid assembly method based on improved Quatre algorithm[J]. Systems Engineering and Electronics, 2022, 44 (9): 2840- 2848. | |
| 5 | 韦涛. 基于局部行为规则的四旋翼无人机群集编队研究[D]. 上海: 上海交通大学, 2018. |
| WEI T. Local behavioralL rults of quadrotors based on research on swarm formation[D]. Shanghai: Shanghai Jiao Tong University, 2018. | |
| 6 |
李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37 (11): 2423- 2431.
doi: 10.7641/CTA.2020.00080 |
|
LI Z P , XIAN B . Robust distributed formation control of multiple unmanned aerial vehicles based on virtual structure[J]. Control Theory & Applications, 2020, 37 (11): 2423- 2431.
doi: 10.7641/CTA.2020.00080 |
|
| 7 | 刘昕彤. 动态环境下多无人机协同控制技术研究[D]. 成都: 电子科技大学, 2017. |
| LIU X T. Research of multiple UAVs'cooperative control under dynamic environment[D]. Chengdu: University of Electronic Science and Technology of China, 2017. | |
| 8 |
ZHANG J L , YAN J G , ZHANG P . Multi-UAV formation control based on a novel back-stepping approach[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (3): 2437- 2448.
doi: 10.1109/TVT.2020.2964847 |
| 9 |
YAN W S , FANG X P , LI J B . Formation optimization for UAV localization with range-dependent measurements noise[J]. IEEE Communications Letters, 2014, 18 (9): 1579- 1582.
doi: 10.1109/LCOMM.2014.2344033 |
| 10 |
NIGAM N , BIENIAWSKI S , KROO I , et al. Control of multiple UAVs for persistent surveillance: algorithm and flight test results[J]. IEEE Trans.on Control Systems Technology, 2012, 20 (5): 1236- 1251.
doi: 10.1109/TCST.2011.2167331 |
| 11 |
ZHENG R H , LIU Y H , SUN D . Enclosing a target by nonholonomic mobile robots with bearing-only measurements[J]. Automatica, 2015, 53, 400- 407.
doi: 10.1016/j.automatica.2015.01.014 |
| 12 | 张毅, 方国伟, 杨秀霞. 具有性能预设的多机编队目标跟踪控制[J]. 系统工程与电子技术, 2021, 43 (4): 1069- 1079. |
| ZHANG Y , FANG G W , YANG X X . Target tracking control of multi-UAV formation with prescribed performance guarantees[J]. Systems Engineering and Electronics, 2021, 43 (4): 1069- 1079. | |
| 13 | GAO K , ZHANG Y L , WANG Y L . Development status of typical UAV systems in emerging countries[J]. Aerospace Technology, 2014, 18 (8): 21- 24. |
| 14 | 吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41 (9): 172- 190. |
| WU Y , LIANG T J . Improved consensus-based algorithm for unmanned aerial vehicle formation control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (9): 172- 190. | |
| 15 | 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39 (1): 1- 11. |
| FEI S Y , XIAN B , WANG L . Distributed formation control for multiple unmanned aerial vehicles with dynamic obstacle avoidance based on the flocking behavior[J]. Control Theory & Applications, 2022, 39 (1): 1- 11. | |
| 16 | WANG J N, XIN M. Multi-agent consensus algorithm with obstacle avoidance via optimal control approach[C]//Proc. of the IEEE American Control Conference, 2011, 6: 2783-2788. |
| 17 |
YU J L , DONG X W , LI Q D , et al. Practical time-varying output formation tracking for high-order multi-agent systems with collision avoidance obstacle dodging and connectivity maintenance[J]. Journal of the Franklin Institute, 2019, 356 (12): 5898- 5926.
doi: 10.1016/j.jfranklin.2019.05.014 |
| 18 |
ALONSO-MORA J , NAEGELI T , SIEGWART R , et al. Co-llision avoidance for aerial vehicles in multi-agent scenarios[J]. Autonomous Robots, 2015, 39 (1): 101- 121.
doi: 10.1007/s10514-015-9429-0 |
| 19 | KURIKI Y, NAMERIKAWA T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system[C]//Proc. of the American Control Conference, 2014: 2077-2082. |
| 20 | WU Y , GOU J Z , HU X T , et al. A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J]. Aerospace Science and Technology, 2020, 107 (1): 1- 18. |
| 21 | ZENG J, ZHANG B K, SREENATH K. Safety-critical model predictive control with discrete-time control barrier function[C]//Proc. of the American Control Conference, 2021: 3882-3889. |
| 22 | 邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31 (6): 1065- 1072. |
| SHAO Z , ZHU X P , ZHOU Z , et al. Distributed formation keeping control of UAVs in 3D dynamic environment[J]. Control and Decision, 2016, 31 (6): 1065- 1072. | |
| 23 |
ONG C J , WANG Z , DEHGHAN M . Model predictive control for switching systems with dwell-time restriction[J]. IEEE Trans.on Automatic Control, 2016, 61 (12): 4189- 4195.
doi: 10.1109/TAC.2016.2552062 |
| 24 |
DAI L , CAO Q , XIA Y Q . Distributed MPC for formation of multi-agent systems with collision avoidance and obstacle avoidance[J]. Journal of the Franklin Institute, 2017, 354 (4): 2068- 2085.
doi: 10.1016/j.jfranklin.2016.12.021 |
| 25 | HE D F , QIU T X , LU L Y . Input-to-state stability of contractive EMPC of non-linear systems with bounded disturbances[J]. IET Control Theory & Applications, 2019, 13 (5): 651- 658. |
| 26 | 马鸣宇, 董朝阳, 马思迁, 等. 基于SO(3)的多四旋翼无人机编队协同控制[J]. 控制理论与应用, 2018, 35 (9): 1229- 1238. |
| MA M Y , DONG C Y , MA S Q , et al. Coordinated control of multiple quadrotors formation on SO(3)[J]. Control Theory & Applications, 2018, 35 (9): 1229- 1238. | |
| 27 | ZHOU K M , MAO J Q , ZHONG Y S , et al. Robust optimal control[M]. Beijing: National Defense Industry Press, 2002. |
| 28 | PRACH A , KAYACAN E . An MPC-based position controller for a tilt-rotor tricopter VTOL UAV[J]. Optimal Control Application & Methods, 2018, 39 (1): 343- 356. |
| 29 | ZOU T , DING B C , ZHANG R . Introduction to model predictive control engineering applications[M]. Beijing: Chemical Industry Press, 2010. |
| 30 | ILLE M, NAMERIKAWA T. Collision avoidance between multiUAV systems considering formation control using MPC[C]//Proc. of the IEEE International Conference on Advanced Intelligent Mechatronics, 2017: 651-656. |
| [1] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [2] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [3] | Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm [J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004. |
| [4] | Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot [J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605. |
| [5] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [6] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [7] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [8] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [9] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [10] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [11] | HUANG Wei, XU Jiancheng, WU Huaxing, LI Junbing. Missile formation consensus control algorithm based on parameter optimization [J]. Systems Engineering and Electronics, 2018, 40(11): 2528-. |
| [12] | GAI Jun-feng, ZHAO Guo-rong, SONG Chao. Model predictive control based on linearization and neural network approach [J]. Systems Engineering and Electronics, 2015, 37(2): 394-399. |
| [13] | TANG Xian-lun,LI Yang,LI Peng,ZHANG Yi. Multi-step model predictive control based on SVR multi-Agent particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2014, 36(5): 958-964. |
| [14] | GAO Xiao-guang, LI Qing-yuan, DI Ruo-hai. MPC three dimensional dynamic path planning for UAV based on DBN threat assessment [J]. Systems Engineering and Electronics, 2014, 36(11): 2199-2205. |
| [15] | CHEN Jin-dong,PAN Feng. Online support vector machine and genetic algorithm based predictive control [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1275-1280. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||