Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (10): 3149-3156.doi: 10.12305/j.issn.1001-506X.2023.10.19
• Systems Engineering • Previous Articles
Demarcation method of safety separation for multi-rotor UAV in free airspace
Honghai ZHANG, Bowen LI, Hao LIU, Gang ZHONG, Yuhan FEI
- School of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
-
Received:2022-05-30Online:2023-09-25Published:2023-10-11 -
Contact:Honghai ZHANG
CLC Number:
Cite this article
Honghai ZHANG, Bowen LI, Hao LIU, Gang ZHONG, Yuhan FEI. Demarcation method of safety separation for multi-rotor UAV in free airspace[J]. Systems Engineering and Electronics, 2023, 45(10): 3149-3156.
share this article

Fig.1
Sphere collision box"


Fig.2
Collision box top and front views"


Fig.3
Schematic diagram of combined collision zone for unmanned aerial vehicle"


Fig.4
Schematic diagram of unmanned aerial vehicle collision probability"

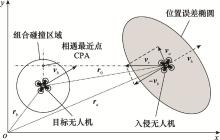
Fig.5
Velocity and position relationship when the target unmanned aerial vehicle and the invading unmanned aerial vehicle meets"


Fig.6
Schematic diagram of free airspace"


Fig.7
Schematic diagram of safety separation based on collision probability"


Fig.8
Schematic diagram of the discretization of heading and >vertical velocity"

Table 1
Technical parameters of Matrice 600 Pro unmanned aerial vehicle"
| 技术参数 | 数值 |
| 外形尺寸(长×宽×高) | 1 668 mm×1 518 mm×759 mm |
| 悬停精度(GPS精度) | 垂直: ±0.5 m, 水平: ±1.5 m |
| 最大俯仰角度/(°) | 25 |
| 最大上升速度/(m/s) | 5 |
| 最大下降速度/(m/s) | 3 |
| 最大水平飞行速度/(km/h) | 65(无风环境) |

Fig.9
Collision probability contours of unmanned aerial vehicle"


Fig.10
Collision probability isosurface of unmanned aerial vehicle"


Fig.11
5% collision probability isosurface section of unmanned aerial vehicle"


Fig.12
Demarcation result of safety separation at different cruising speeds"

| 1 | 付其喜, 梁晓龙, 张佳强,等.无人机低空交通管理系统综述[J].飞行力学,2019,37(2):1-6. |
| FUQ X , LIANGX L , ZHANGJ Q ,et al.Overview of low altitude air traffic management system for UAS[J].Flight Dynamics,2019,37(2):1-6. | |
| 2 |
REICHP G .Analysis of long-range air traffic systems: separation standards-Ⅰ[J].Journal of Navigation,1966,19(1):88-98.
doi: 10.1017/S037346330004056X |
| 3 |
REICHP G .Analysis of long-range air traffic systems: separation standards—Ⅲ[J].Journal of Navigation,1966,19(3):331-347.
doi: 10.1017/S0373463300047445 |
| 4 |
REICHP G .Analysis of long-range air traffic systems: separation standards—Ⅱ[J].Journal of Navigation,1966,19(2):169-186.
doi: 10.1017/S0373463300047196 |
| 5 |
BROOKERP .Aircraft collision risk in the North Atlantic region[J].Journal of the Operation Research Society,1984,35(8):695-703.
doi: 10.1057/jors.1984.145 |
| 6 |
TENH J M , COXM E , FORRESTERD A .European studies to investigate the feasibility of using 1 000 ft vertical separation minima above FL 290 Part Ⅰ[J].Journal of Navigation,1991,44(2):171-183.
doi: 10.1017/S0373463300009917 |
| 7 |
HARRISOND , MOEKG .European studies to investigate the feasibility of using 1 000 ft vertical separation minima above FL 290. Part Ⅱ: precision radar data analysis and collision risk assessment[J].Journal of Navigation,1992,45(1):91-106.
doi: 10.1017/S037346330001050X |
| 8 |
MOEKG , HAVEJ , HARRISOND ,et al.European studies to investigate the feasibility of using 1 000 ft vertical separation minima above FL 290. Part Ⅲ: further results and overall conclusions[J].Journal of Navigation,1993,46(2):245-261.
doi: 10.1017/S0373463300011589 |
| 9 |
ANDERSOND , LINX G .A collision risk model for a crossin track separation methodology[J].The Journal of Navigation,1996,49(3):337-349.
doi: 10.1017/S0373463300013576 |
| 10 | 张兆宁, 佐江丽.基于布朗运动的自由飞行下碰撞风险研究[J].中国安全科学学报,2012,22(8):43-47. |
| ZHANGZ N , ZUOJ L .Study on free flight collision risk based on Brownian motion[J].China Safety Science Journal,2012,22(8):43-47. | |
| 11 | 张兆宁, 梁玉文.自由飞行下基于贝叶斯网络的碰撞风险研究[J].中国安全科学学报,2014,24(9):40-45. |
| ZHANGZ N , LIANGY W .Bayesian network-based study on collision risk in free flight[J].China Safety Science Journal,2014,24(9):40-45. | |
| 12 | 张兆宁, 时瑞军.自由飞行下基于冲突解脱的碰撞风险模型研究[J].安全与环境工程,2016,23(2):157-161. |
| ZHANGZ N , SHIR J .Study on free flight collision risk model based on conflict resolution[J].Safety and Environmental Engineering,2016,23(2):157-161. | |
| 13 | 张兆宁, 余晟.自由飞行下基于航空器定位误差修正的碰撞风险研究[J].安全与环境学报,2017,17(5):1633-1636. |
| ZHANGZ N , YUS .On the collision risk in rectification of the aircraft positioning error under the free flight condition[J].Safety and Environmental Engineering,2017,17(5):1633-1636. | |
| 14 | ZOUY Y , ZHANGH H , FENGD K ,et al.Fast collision detection for small unmanned aircraft systems in urban airspace[J].IEEE Access,2021,9,16630-16641. |
| 15 | LEEH T , MEYNL A , KIMS Y .Probabilistic safety assessment of unmanned aerial system operations[J].Journal of Guidance, Control, and Dynamics,2013,36(2):610-617. |
| 16 | OLIVARES G, LACY T, GOMEZ L, et al. Volume Ⅰ-UAS airborne collision severity evaluation-quadcopter[R]. Springfield: Federal Aviation Administration, 2017: 1-27. |
| 17 | OLIVARES G, GOMEZ L, ESPINOSA D l M J, et al. Volume Ⅱ-UAS airborne collision severity evaluation-quadcopter[R]. Springfield: Federal Aviation Administration, 2017: 1-23. |
| 18 | OLIVARES G, LACY T, KOTA K, et al. Volume Ⅲ-UAS airborne collision severity evaluation-fixed wing[R]. Springfield: Federal Aviation Administration, 2017: 1-25. |
| 19 | SOUZA D, LYONS T, LACY T, et al. Volume Ⅳ-UAS airborne collision severity evaluation-fixed wing[R]. Springfield: Federal Aviation Administration, 2017: 1-19. |
| 20 | MCFADYEN A, MARTIN T, PEREZ T. Low-level collision risk modelling for unmanned aircraft integration and management[C]//Proc. of the IEEE Aerospace Conference, 2018. |
| 21 | 邓力.无人机与民航客机碰撞概率研究[J].南京理工大学学报,2019,43(1):122-128. |
| DENGL .Research of collision probability of unmanned aerial vehicals and civil airplane[J].Journal of Nanjing University of Science and Technology,2019,43(1):122-128. | |
| 22 | WEINERTA , CAMPBELLS , VELAA ,et al.Well-clear re-commendation for small unmanned aircraft systems based on unmitigated collision risk[J].Journal of Air Transportation,2018,26(3):113-122. |
| 23 | CHEN C, EDWARDS M W, GILL B, et al. Defining well clear separation for unmanned aircraft systems operating with noncooperative aircraft[C]//Proc. of the AIAA Aviation Forum, 2019: 3512. |
| 24 | DA Y T W C, SALLEH M F B M, LOWB K. Study on impact of separation distance to traffic management for small UAS operations in urban environment[M]//Transdisciplinary Engineering: a Paradigm Shift. Amsterdam: IOS Press, 2017: 39-61. |
| 25 | WEIBEL R, EDWARDS M, FERNANDES C. Establishing a risk-based separation standard for unmanned aircraft self separation[C]//Proc. of the 11th AIAA Aviation Technology, Integration, and Operations Conference, 2011: 6921-6945. |
| 26 | COOK S P, BROOKS D, COLE R, et al. Defining well clear for unmanned aircraft systems[C]//Proc. of the AIAA Infotech Aerospace, 2015: 327-346. |
| 27 | WEIBEL R E, HANSMAN R J. Safety considerations for ope-ration of unmanned aerial vehicles in the national airspace system: ICAT-2005-1[R]. Cambridge: MIT International Center for Air Transportation, 2005. |
| 28 | LUMC , WAGGONERB .A risk based paradigm and model for unmanned aerial systems in the national airspace[M].Reston:American Institute of Aeronautics and Astronautics,2011:1424. |
| 29 | MCFADYEN A, MARTIN T, PEREZ T. Low-level collision risk modelling for unmanned aircraft integration and management[C]//Proc. of the IEEE Aerospace Conference, 2018. |
| 30 | 王莉莉, 阳杰.基于位置误差概率模型的物流无人机安全间隔评估方法研究[J].中国安全生产科学技术,2022,18(3):184-192. |
| WANGL L , YANGJ .Research on assessment method of safety separation for logistics UAVs based on position error probability model[J].Journal of Safety Science and Technology,2022,18(3):184-192. |
| [1] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [2] | Zhiwei XING, Hong'en LIU, Biao LI, Qian LUO, Tao WEN, Zhaoxin CHEN. Modelling for airport gate operation process based on relational spatio-temporal network [J]. Systems Engineering and Electronics, 2021, 43(3): 722-730. |
| [3] | Tao XU, Zhishuai WU, Min LU, Zonglei LYU, Zhonghu LI. Optimization model of hub-and-spoke network for congestion problem [J]. Systems Engineering and Electronics, 2020, 42(11): 2553-2559. |
| [4] | XING Zhiwei, LI Biao, LUO Qian. Operational effectiveness evaluation of ground service for transit flight [J]. Systems Engineering and Electronics, 2019, 41(5): 1071-1078. |
| [5] | SU Fei, LIU Jing, ZHANG Yao, YANG Xu, CHENG Haowen. Analysis of optimal impulse for in plane collision avoidance maneuver [J]. Systems Engineering and Electronics, 2018, 40(12): 2782-2789. |
| [6] | ZHANG Tian-ci, DING Meng, ZUO Hong-fu, WANG Bang-feng, ZENG Li-na, SUN Ze-jun. Zone control based aircraft ground movement trajectory optimization model [J]. Systems Engineering and Electronics, 2016, 38(1): 136-141. |
| [7] | ZHU Xiao-hui, ZHANG Jun. Air traffic complexity evaluation method based on probabilistic trajectory prediction [J]. Systems Engineering and Electronics, 2014, 36(2): 300-305. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||