Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (8): 2643-2650.doi: 10.12305/j.issn.1001-506X.2023.08.40
• Reliability • Previous Articles
Reliability analysis of industrial robot driver combining MRGP and PSO
Ying ZENG1,2, Yanfeng LI1,2,*, Hongyi WANG1,2, Huaming QIAN2,3, Hongzhong HUANG1,2
- 1. School of Mechanical and Electrical Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China
2. Center for System Reliability and Safety, University of Electronic Science and Technology of China, Chengdu 611731, China
3. State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China
-
Received:2023-02-15Online:2023-07-25Published:2023-08-03 -
Contact:Yanfeng LI
CLC Number:
Cite this article
Ying ZENG, Yanfeng LI, Hongyi WANG, Huaming QIAN, Hongzhong HUANG. Reliability analysis of industrial robot driver combining MRGP and PSO[J]. Systems Engineering and Electronics, 2023, 45(8): 2643-2650.
share this article

Fig.1
HSS-LDE-RC6-008 servo driver"

Table 1
Failure modes of robot driver"
| 元器件失效 | 电路连接失效 | ||
| 失效部件 | 失效模式 | 失效部件 | 失效模式 |
| 电容 | 击穿(短路)、开路、漏液、电参数超差等 | 焊点 | 疲劳、断裂 |
| 电阻 | 开路、参数漂移等 | 引脚 | 断裂 |
| 电感 | 短路、开路 | 镀瞳孔 | 疲劳、断裂 |
| 二极管 | 短路、开路、阈值电阻老化 | PCB电路板 | 断裂 |
| IGBT | 键合线断裂脱落、疲劳、芯片破坏 | - | - |
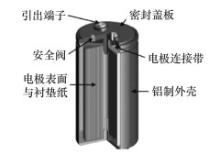
Fig.2
Structure diagram of electrolytic capacitor"

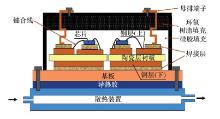
Fig.3
Internal packaging structure diagram of IGBT module"


Fig.4
Cross-sectional structure diagram of general multilayer PCB board"

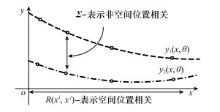
Fig.5
Schematic diagram of MRGP model dealing with multi-output variable correlation"


Fig.6
Implementation process of PSO algorithm"


Fig.7
The proposed reliability modeling and analysis process"


Fig.8
Iterative results of different algorithms under U-learning function"

Table 2
Calculation results of numerical examples under different algorithms"
| 可靠性算法 | 设计点数量(初始点+g1+g2+g3) | Pf (误差, 变异系数) | |
| 不同算法 | 学习函数 | ||
| MRGP-PSO | EFF | (8+24)×3 | 1.191×10-3 (0%, 2.90%) |
| U | (8+24)×3 | 1.191×10-3 (0%, 2.90%) | |
| H | (8+23)×3 | 1.193×10-3 (0.168%, 2.89%) | |
| AK-SYS | EFF | 8×3+15+17+0 | 1.190×10-3 (0.084%, 2.90%) |
| U | 8×3+10+20+0 | 1.200×10-3 (0.756%, 2.89%) | |
| H | 8×3+5+12+0 | 1.785×10-3 (49.87%, 2.36%) | |
| 原始MRGP | EFF | (8+32)×3 | 1.191×10-3 (0%, 2.90%) |
| U | (8+33)×3 | 1.191×10-3 (0%, 2.90%) | |
| H | (8+31)×3 | 1.192×10-3 (0.084%, 2.89%) | |
| AK-MCS | EFF | (8+371)×3 | 1.190×10-3 (0.084%, 2.90%) |
| U | (8+329)×3 | 1.186×10-3 (0.420%, 2.90%) | |
| H | (8+18)×3 | 8.26×10-4 (30.6%, 3.48%) | |
| MCS | - | 3×105 | 1.191×10-3 (‘truth’, 2.90%) |
Table 3
Random variables included in the driver reliability model"
| 随机变量 | 均值, 标准差 |
| 电容器容量/μF | 10, 0.1 |
| 电压/V | 24, 1 |
| 相对湿度 | 0.6, 0.1 |
| 纹波电流/mA | 55, 4 |
| 电容表面积/cm2 | 5.2, 0.16 |
| 键合点高度/m | 4.2×10-4, 1×10-8 |
| 键合点长度/m | 4.5×10-2, 1×10-3 |
| 温度/K | 100, 1 |
| PCB厚度/m | 2×10-3, 5×10-5 |
| PTH孔半径/m | 2.25×10-4, 1×10-6 |
| PTH厚度/m | 25×10-6, 7×10-8 |
| PCB作用半径/m | 1.025×10-3, 1×10-6 |

Fig.9
Finite element simulation and analysis of driver IGBT module bonding line"


Fig.10
Iterative process change curve of driver failure probability"

| 16 | SHI Y , LU Z Z , ZHOU Y C , et al. A novel learning function based on Kriging for reliability analysis[J]. Reliability Engineering and System Safety, 2020, 198 (2): 106857. |
| 17 | ZHANG X B , LU Z Z , CHENG K . Reliability index function approximation based on adaptive double-loop Kriging for reliability-based design optimization[J]. Reliability Engineering and System Safety, 2021, 216 (2): 108020. |
| 18 |
WANG J S , XU G J , LI Y L , et al. AKSE: a novel adaptive Kriging method combining sampling region scheme and error-based stopping criterion for structural reliability analysis[J]. Reliability Engineering and System Safety, 2022, 219, 108214.
doi: 10.1016/j.ress.2021.108214 |
| 19 | ZUHAL L R , FAZA G A , PALAR P S , et al. On dimensionality reduction via partial least squares for Kriging-based reliability analysis with active learning[J]. Reliability Engineering and System Safety, 2021, 215 (4): 107848. |
| 20 |
KASTHA D , BOSE B K . Investigation of fault modes of voltage-fed inverter system for induction motor drive[J]. IEEE Trans.on Industry Applications, 1994, 30 (4): 1028- 1038.
doi: 10.1109/28.297920 |
| 21 | 王弘毅. 多失效模式下工业机器人驱动器可靠性分析与优化[D]. 成都: 电子科技大学, 2020. |
| WANG H Y. Reliability analysis and optimization of industrial robot drivers with multiple failure modes[D]. Chengdu: University of Electronic Science and Technology of China, 2020. | |
| 22 | 罗皓泽. 基于动态热敏电参数法的大容量IGBT模块结温在线提取原理和方法研究[D]. 杭州: 浙江大学, 2015. |
| LUO H Z. On-line junction temperature extraction for high power IGBT modules with dynamical temperture sensitive elecrical paramaters (DTSEPs)[D]. Hangzhou: Zhejiang University, 2015. | |
| 23 | 俞珊, 徐志望, 董纪清. 开关电源中电解电容寿命预测分析[J]. 电源学报, 2016, 14 (6): 7: 87- 92. |
| YU S , XU Z W , DONG J Q . Analysis of electrolytic capacitor life prediction in switching power supply[J]. Journal of Power Supply, 2016, 14 (6): 87- 92. | |
| 24 | ABUELNAGA A , NARIMANI M , BAHMAN A S . A review on IGBT module failure modes and lifetime testing[J]. IEEE Access, 2021, 9, 9643- 9663. |
| 25 | XIE D, GEIGER D, SHANGGUAN D, et al. Failure mechanism and mitigation of PCB pad cratering[C]//Proc. of the Electronic Components & Technology Conference, 2010. |
| 26 | ROGGEMAN B, BORGESEN P, JING L, et al. Assessment of PCB pad cratering resistance by joint level testing[C]//Proc. of the Electronic Components & Technology Conference, 2008. |
| 27 | ARNALDO I, KRAWIEC K, O"REILLY U M. Multiple regression genetic programming[C]//Proc. of the Conference on Genetic & Evolutionary Computation, 2014: 879-886. |
| 28 | ARENDT P D , APLEY D W , CHEN W , et al. Improving identifiability in model calibration using multiple responses[J]. Journal of Mechanical Design, 2012, 134 (10): 100909. |
| 29 | KENNEDY J, EBERHART R. Particle swarm optimization[C]// Proc. of the International Conference on Swarm Intelligence, 1995: 33-57. |
| 30 | 郭来小. IGBT基于故障物理的失效分析及电子器件加速寿命模型的研究[D]. 成都: 电子科技大学, 2018. |
| GUO L X. Failure analysis of IGBT based on physics of failure and study on accelerated life models of electronic devices[D]. Chengdu: University of Electronic Science and Technology of China, 2018. | |
| 1 | 钱华明. 工业机器人关键部件的时变可靠性分析及优化方法研究[D]. 成都: 电子科技大学, 2021. |
| QIAN H M. Research on time-variant reliability analysis and optimization method for key components of industrial robot[D]. Chengdu: University of Electronic Science and Technology of China, 2021. | |
| 2 |
CHIEN M C , HUANG A C . Adaptive control for flexible-joint electrically driven robot with time-varying uncertainties[J]. IEEE Trans.on Industrial Electronic, 2007, 54 (2): 1032- 1038.
doi: 10.1109/TIE.2007.893054 |
| 3 |
HOSODA K , SAKAGUCHI Y , TAKAYAMA H , et al. Pneumatic-driven jumping robot with anthropomorphic muscular skeleton structure[J]. Autonomous Robots, 2010, 28 (3): 307- 316.
doi: 10.1007/s10514-009-9171-6 |
| 4 |
PEIRCE A P , SIEBRITS E . A dual mesh multigrid preconditioner for the efficient solution of hydraulically driven fracture problems[J]. International Journal for Numerical Methods in Engineering, 2005, 63 (13): 1797- 1823.
doi: 10.1002/nme.1330 |
| 5 | QIAN H M , LI Y F , HUANG H Z . Time-variant reliability analysis for industrial robot RV reducer under multiple failure modes using Kriging model[J]. Reliability Engineering and System Safety, 2020, 199 (4): 106936. |
| 6 |
BAI B , XIE C X , LIU X D , et al. Application of integrated factor evaluation-analytic hierarchy process-T-S fuzzy fault tree analysis in reliability allocation of industrial robot systems[J]. Applied Soft Computing, 2022, 115, 108248.
doi: 10.1016/j.asoc.2021.108248 |
| 7 |
BICHON B J , ELDRED M S , SWILER L P , et al. Efficient global reliability analysis for nonlinear implicit performance functions[J]. AIAA Journal, 2008, 46 (10): 2459- 2468.
doi: 10.2514/1.34321 |
| 8 |
ECHARD B , GAYTON N , LEMAIRE M . AK-MCS: an active learning reliability method combining Kriging and Monte Carlo simulation[J]. Structural Safety, 2011, 33 (2): 145- 154.
doi: 10.1016/j.strusafe.2011.01.002 |
| 9 | ECHARD B , GAYTON N , LEMAIRE M , et al. A combined importance sampling and Kriging reliability method for small failure probabilities with time-demanding numerical models[J]. Reliability Engineering & System Safety, 2013, 111, 232- 240. |
| 10 |
HUANG X X , CHEN J Q , ZHU H P . Assessing small failure probabilities by AK-SS: an active learning method combining Kriging and subset simulation[J]. Structural Safety, 2016, 59, 86- 95.
doi: 10.1016/j.strusafe.2015.12.003 |
| 11 | FAURIAT W , GAYTON N . AK-SYS: an adaptation of the AK-MCS method for system reliability[J]. Reliability Engineering & System Safety, 2014, 123, 137- 144. |
| 12 |
XIAO N C , ZHAN H Y , YUAN K . A new reliability method for small failure probability problems by combining the adaptive importance sampling and surrogate models[J]. Computer Methods in Applied Mechanics and Engineering, 2020, 372, 113336.
doi: 10.1016/j.cma.2020.113336 |
| 13 | YUAN K , XIAO N C , WANG Z , et al. System reliability analysis by combining structure function and active learning Kriging model[J]. Reliability Engineering & System Safety, 2020, 195, 106734. |
| 14 | WANG Z , SHAFIEEZADEH A . REAK: reliability analysis through error rate-based adaptive Kriging[J]. Reliability Engineering & System Safety, 2019, 182, 33- 45. |
| 15 | ZHANG X , WANG L , SØRENSEN J D . REIF: a novel active-learning function toward adaptive Kriging surrogate models for structural reliability analysis[J]. Reliability Engineering & System Safety, 2019, 185, 440- 454. |
| [1] | Leilei ZHANG, Xi LIU, Xulin LIU, Hongjun YANG, Feng ZHANG. Accelerated storage life assessment method under zero-failure data for electromechanical products of missile [J]. Systems Engineering and Electronics, 2023, 45(7): 2287-2294. |
| [2] | Junliang LI, Huayuan ZHU, Zheng WANG, Liming WANG, Xinlei ZHANG. Reliability modeling of airborne products based on mixed Gamma distribution [J]. Systems Engineering and Electronics, 2023, 45(2): 614-620. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Siyu DU, Yinghui QUAN, Minghui SHA, Wen FANG, Mengdao XING. Waveform optimization for SFA radar based on evolutionary particle swarm optimization [J]. Systems Engineering and Electronics, 2022, 44(3): 834-840. |
| [5] | Yifan LI, Huaming QIAN, Hongzhong HUANG, Tingyu ZHANG, Tudi HUANG. Reliability analysis of command and control network system based on generalized continuous time Bayesian network [J]. Systems Engineering and Electronics, 2022, 44(12): 3880-3886. |
| [6] | Peng WANG, Zijing SUN, Fan ZHANG, Guosong XIAO. Reliability analysis model for phased-mission system considering probabilistic common cause failures [J]. Systems Engineering and Electronics, 2022, 44(12): 3887-3898. |
| [7] | Kun WANG, Shuxian HOU, Li WANG. APU performance parameter prediction model based on adaptive variation PSO-SVM [J]. Systems Engineering and Electronics, 2021, 43(2): 526-536. |
| [8] | Shuai ZHAO, Songtao LIU, Huiyang WANG. LPI radar waveform recognition algorithm based on PSO-CNN [J]. Systems Engineering and Electronics, 2021, 43(12): 3552-3563. |
| [9] | Zelong MAO, Zhihua WANG, Qiong WU, Chengrui LIU. Bivariate and two-stage degradation modeling and reliability analysis [J]. Systems Engineering and Electronics, 2021, 43(12): 3725-3731. |
| [10] | Zhigang SU, Xinran CHEN, Jingtang HAO. Circular array beamforming method based on particle swarm optimization [J]. Systems Engineering and Electronics, 2020, 42(7): 1449-1454. |
| [11] | Yuqi CHEN, Tingxue XU, Zhiqiang LI, Haijun LI. Dynamic reliability analysis of complex multi-state system based on evidence GO method [J]. Systems Engineering and Electronics, 2020, 42(1): 230-237. |
| [12] | LI Xiaopeng, HUANG Hongzhong, LI Fuqiu. PRA based reliability analysis of complex space phased-mission system [J]. Systems Engineering and Electronics, 2019, 41(9): 2141-2147. |
| [13] | YANG Lechang, GUO Yanling. Bayesian melding approach of probability distribution fusion for system reliability analysis and prediction [J]. Systems Engineering and Electronics, 2018, 40(7): 1660-1668. |
| [14] | DING Song, DANG Yaoguo, XU Ning, WANG Junjie, GENG Shuaishuai. Construction and optimization of a multi-variables discrete grey power model [J]. Systems Engineering and Electronics, 2018, 40(6): 1302-1309. |
| [15] | LAN Jie, YUAN Hongjie, XIA Jing. Improved method for dynamic fault tree analysis based on discrete time Bayesian network [J]. Systems Engineering and Electronics, 2018, 40(4): 948-953. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||