Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 184-192.doi: 10.12305/j.issn.1001-506X.2023.01.22
• Guidance, Navigation and Control • Previous Articles
Design of ultra-tightly integrated GNSS/SINS simulation platform in signal level
Wei GAO1, Yafeng LI2, Kedong WANG1,*
- 1. School of Astronautics, Beihang University, Beijing 102206, China
2. School of Automation, Beijing Information Science and Technology University, Beijing 100192, China
-
Received:2021-11-17Online:2023-01-01Published:2023-01-03 -
Contact:Kedong WANG
CLC Number:
Cite this article
Wei GAO, Yafeng LI, Kedong WANG. Design of ultra-tightly integrated GNSS/SINS simulation platform in signal level[J]. Systems Engineering and Electronics, 2023, 45(1): 184-192.
share this article
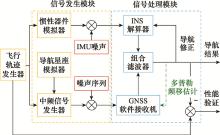
Fig.1
Diagram of functional structure of the ultra-tightly integrated GNSS/SINS simulation platform"
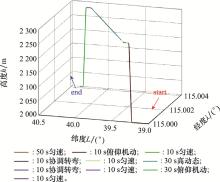
Fig.2
Designed vehicle trajectory"

Fig.3
Ideal IMU output datas"
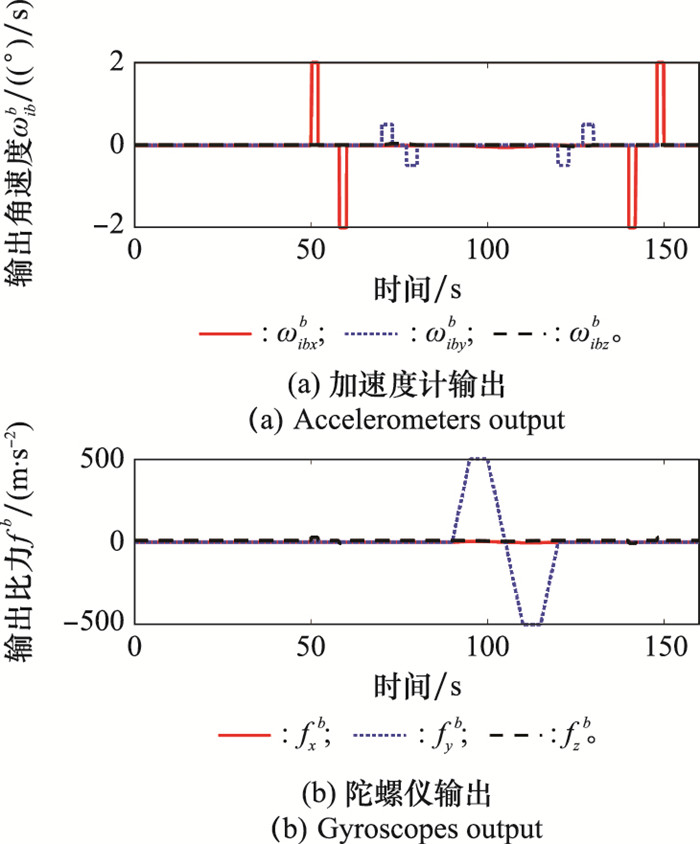
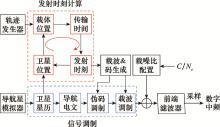
Fig.4
Scheme of the GPS intermediate frequency signal simulation"
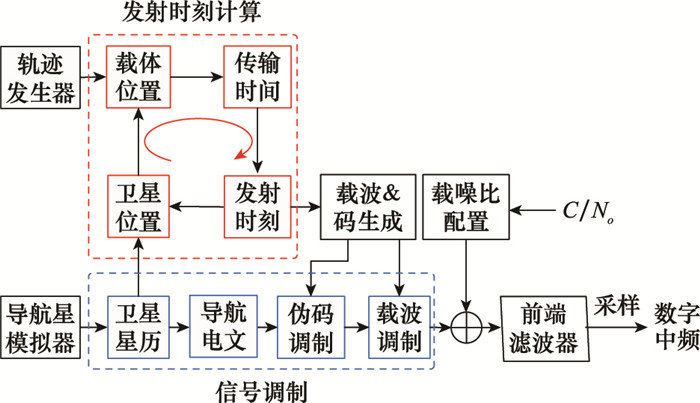

Fig.5
Power spectrum of the filtered ideal intermediate frequency signal"
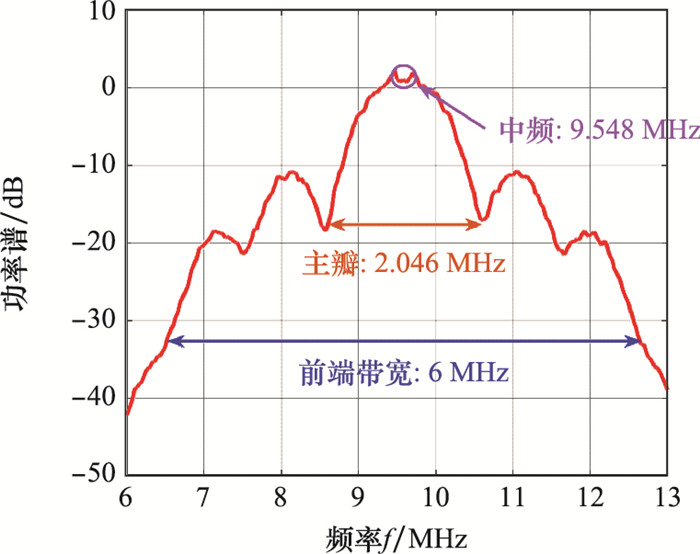
Fig.6
Acquisition results of frequency and code phase of a satellite channel"
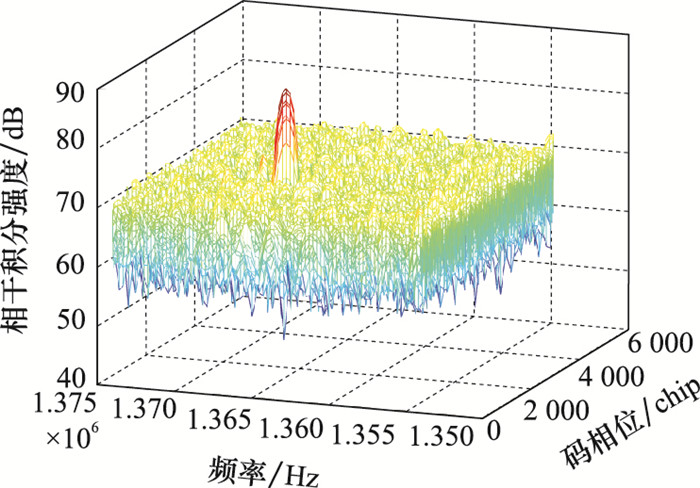
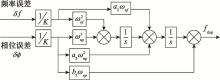
Fig.7
2nd-order FLL aided 3rd-order PLL"
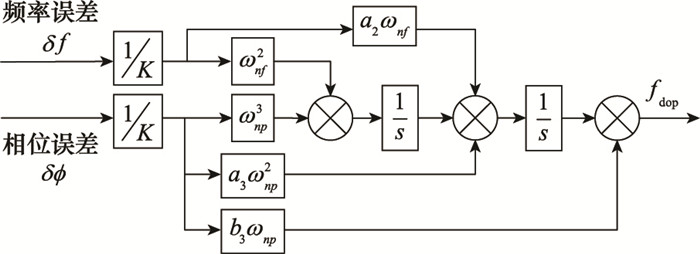

Fig.8
Tracking results of carrier Doppler frequency shift of all satellite channels"
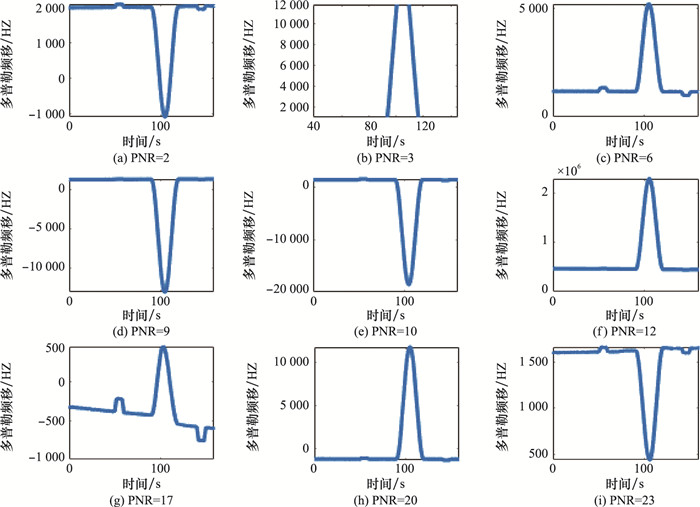

Fig.9
Packaged message of No.1~No.3 subframes of a satellite channel"
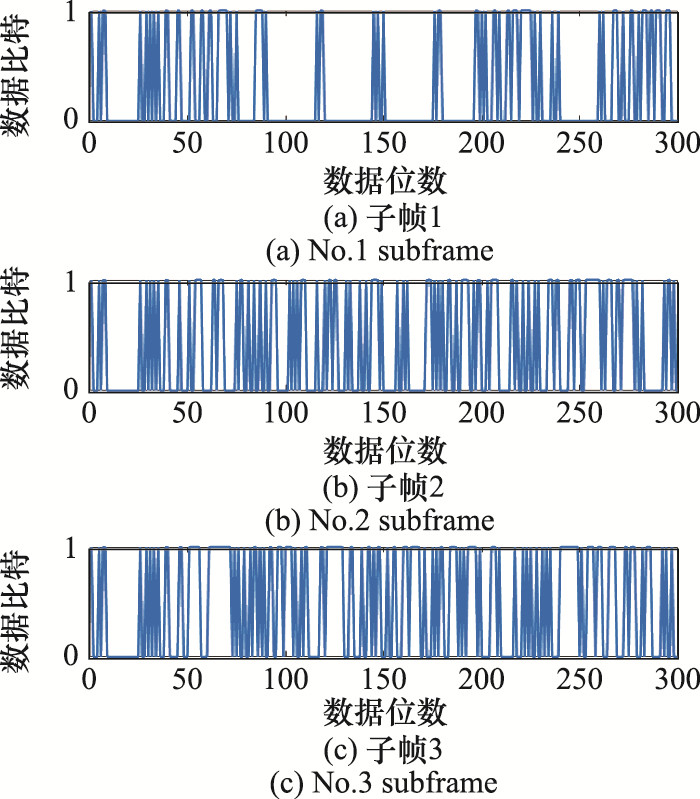

Fig.10
Solving results of the GPS software receiver"
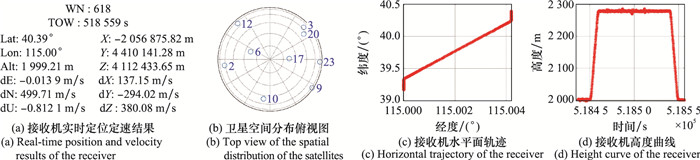
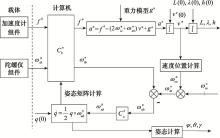
Fig.11
SINS solving diagram"
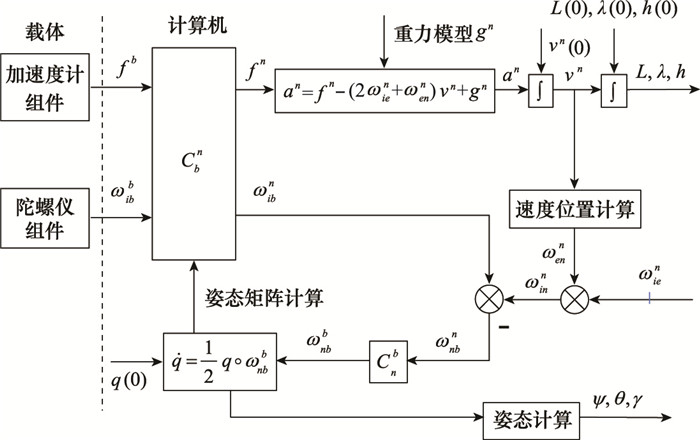

Fig.12
Diagram of the SINS-velocity-aided tracking loop"
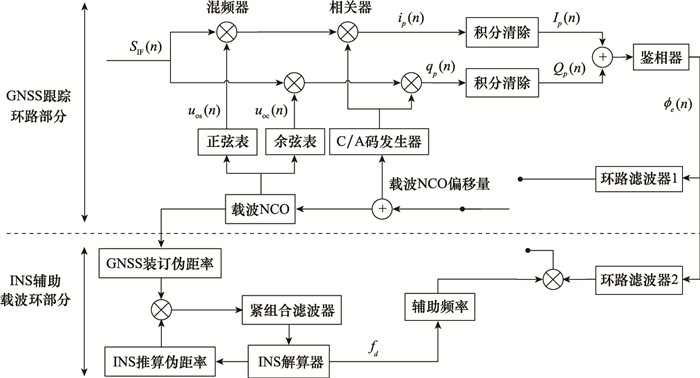
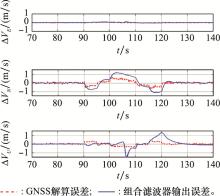
Fig.13
Velocity errors of the tight integration (design 1)"
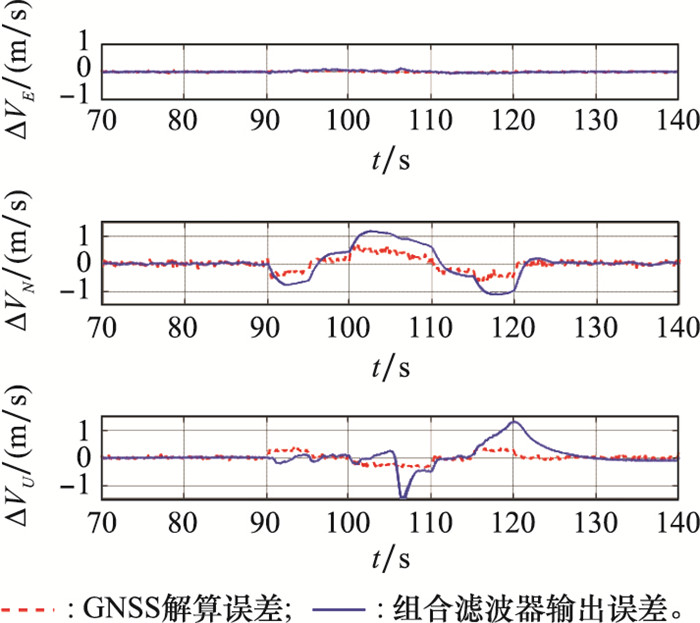
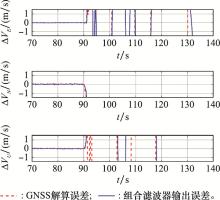
Fig.14
Velocity errors of the tight integration (design 2)"
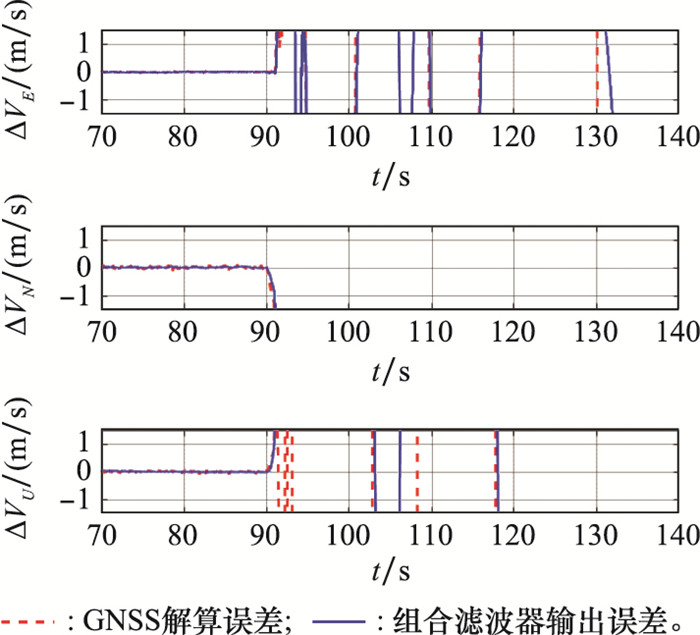
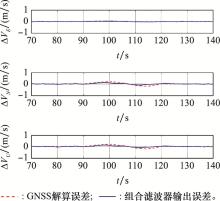
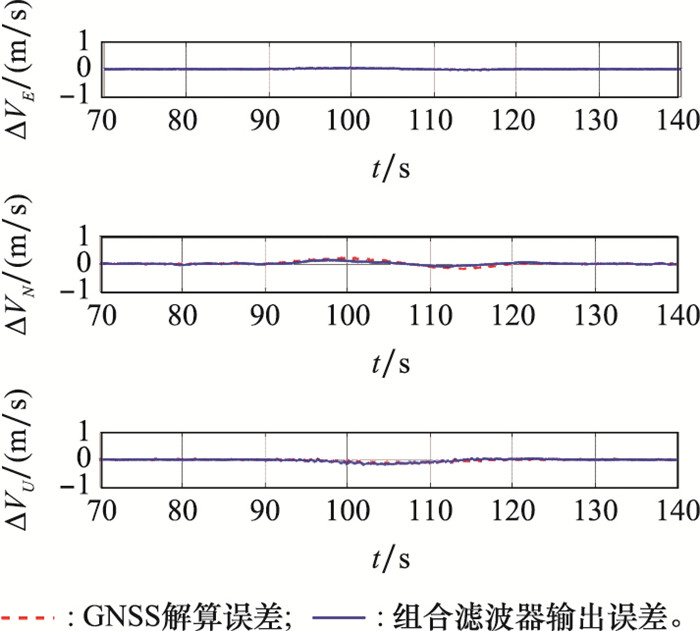
Fig.15
Velocity errors of the ultra-tight integration (design 1)"
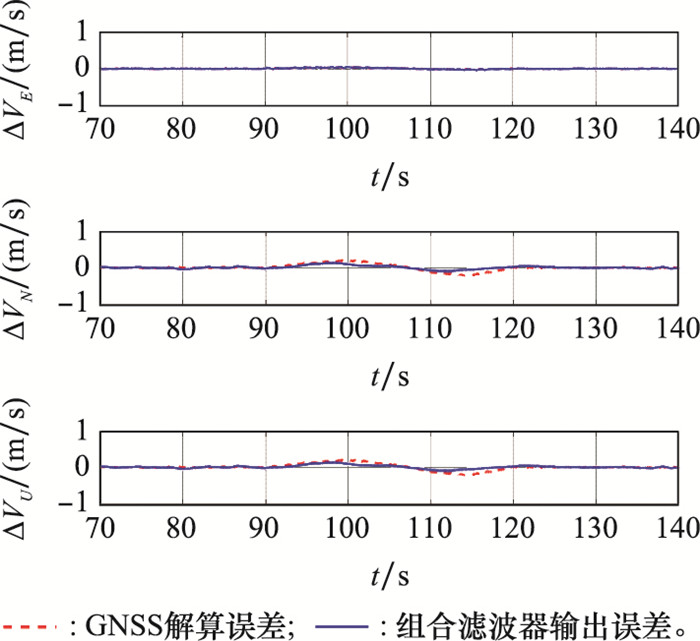
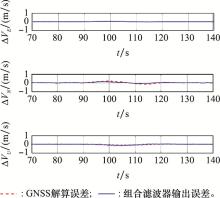
Fig.16
Velocity errors of the ultra-tight integration (design 2)"
| 1 | 张鑫, 冯双记. 机载INS/GNSS深组合导航系统发展现状[J]. 光学与光电技术, 2021, 19 (6): 88- 96. |
| ZHANG X , FENG S J . Development status of airborne INS/GNSS deep integrated navigation system[J]. Optics & Optoelectronic Technology, 2021, 19 (6): 88- 96. | |
| 2 |
BABU R , WANG J L . Ultra-tight GPS/INS/PL integration: a system concept and performance analysis[J]. GPS Solutions, 2009, 13 (1): 75- 82.
doi: 10.1007/s10291-008-0097-9 |
| 3 | 傅金琳, 张崇猛, 阎磊, 等. 一种低复杂度的惯性/GNSS矢量深组合方法[J]. 中国惯性技术学报, 2019, 27 (6): 753- 758. |
| FU J L , ZHANG C M , YAN L , et al. A low-complexity inertial/GNSS vector deep integration method[J]. Journal of Chinese Inertial Technology, 2019, 27 (6): 753- 758. | |
| 4 |
YAN Z , CHEN X Y , TANG X H . A novel linear model based on code approximation for GNSS/INS ultra-tight integration system[J]. Sensors, 2020, 20 (11): 3192.
doi: 10.3390/s20113192 |
| 5 |
SHEN C , XIONG Y F , ZHAO D H , et al. Multi-rate strong tracking square-root cubature Kalman filter for MEMS-INS/GPS/polarization compass integrated navigation system[J]. Mechanical Systems and Signal Processing, 2022, 163, 108146.
doi: 10.1016/j.ymssp.2021.108146 |
| 6 |
YAN F , LI S , ZHANG E Z , et al. An adaptive nonlinear filter for integrated navigation systems using deep neural networks[J]. Neurocomputing, 2021, 446, 130- 144.
doi: 10.1016/j.neucom.2021.03.046 |
| 7 |
ZHI Z , LIU D T , LIU L S . A performance compensation method for GPS/INS integrated navigation system based on CNN-LSTM during GPS outages[J]. Measurement, 2022, 188, 110516.
doi: 10.1016/j.measurement.2021.110516 |
| 8 |
WEI X K , LI J , ZHANG D B , et al. An improved integrated navigation method with enhanced robustness based on factor graph[J]. Mechanical Systems and Signal Processing, 2021, 155, 107565.
doi: 10.1016/j.ymssp.2020.107565 |
| 9 | ZHAO S H, AKOS D. An open source GPS/GNSS vector tracking loop-implementation, filter tuning, and results[C]//Proc. of the International Technical Meeting of The Institute of Navigation, 2011: 1293-1305. |
| 10 | BORRE K, AKOS D. A software-defined GPS and Galileo receiver: single-frequency approach[C]//Proc. of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2005: 1632-1637. |
| 11 |
XU B , HSU L T . Open-source MATLAB code for GPS vector tracking on a software-defined receiver[J]. GPS Solutions, 2019, 23, 46.
doi: 10.1007/s10291-019-0839-x |
| 12 | LIU G , GUO M F , ZHANG R , et al. Hardware-implementable vector tracking loop for GNSS/INS deep integration[J]. Journal of Chinese Inertial Technology, 2015, 23 (2): 189- 195. |
| 13 |
YANG H T , ZHOU B , WANG L X , et al. Design and implementation of an open-source MATLAB code for GNSS/MEMS-INS deep integrated navigation[J]. Optik, 2021, 242, 166987.
doi: 10.1016/j.ijleo.2021.166987 |
| 14 | 谢钢. GPS原理和接收机设计[M]. 北京: 电子工业出版社, 2009: 266- 303. |
| XIE G . Principles of GPS and receiver design[M]. Beijing: Publishing House of Electronics Industry, 2009: 266- 303. | |
| 15 | 刘科, 吴文启, 唐康华, 等. 利用实际飞行数据插值的INS/GNSS组合导航仿真轨迹发生器[J]. 国防科技大学学报, 2018, 40 (1): 132- 137. |
| LIU K , WU W Q , TANG K H , et al. Trajectory generator for INS/GNSS integration simulation through real flight data interpolation[J]. Journal of National University of Defense Technology, 2018, 40 (1): 132- 137. | |
| 16 | MA C, LACHAPELLE G, CANNON M E. Implementation of a software GPS receiver[C]//Proc. of the International Technical Meeting of the Institute of Navigation, 2004. |
| 17 | 王可东. Kalman滤波基础及MATLAB仿真[M]. 北京: 北京航空航天大学出版社, 2019: 256- 281. |
| WANG K D . Foundation of Kalman filter and MATLAB simulation[M]. Beijing: Beihang University Press, 2019: 256- 281. |
| [1] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [2] | Zhe LIANG, Zhaofa ZHOU, Zhihao XU, Wenting LYU, Hui DUAN. Angular rate attitude algorithm based on multi-interval information correction [J]. Systems Engineering and Electronics, 2022, 44(5): 1636-1643. |
| [3] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [4] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [5] | Heliang YUAN, Tian JIN, Jiaqing QU, Hongli LYU. Processing technology of discontinuous satellite navigation signal under rotating condition [J]. Systems Engineering and Electronics, 2021, 43(9): 2573-2580. |
| [6] | Qinglong ZHANG, Yuming WANG, Erwei CHENG, Yazhou CHEN, Liyun MA. Investigation on the effect law and prediction method of out-of-band electromagnetic interference in navigation receiver [J]. Systems Engineering and Electronics, 2021, 43(9): 2588-2593. |
| [7] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [8] | Wenyi WANG, Jing GONG, Jinming WANG. GNSS spoofing interference detection based on variance of SCB [J]. Systems Engineering and Electronics, 2021, 43(8): 2254-2262. |
| [9] | Yu SU, Wenfang JING, Xiaochun LU, Yang ZHANG. Carrier frequency accuracy improvement algorithm based on BP-PID control [J]. Systems Engineering and Electronics, 2021, 43(7): 1894-1903. |
| [10] | Zhihao XU, Zhaofa ZHOU, Zhenjun CHANG, Qi GUO. Initial alignment method based on information reuse and algorithm fusion [J]. Systems Engineering and Electronics, 2021, 43(5): 1310-1315. |
| [11] | Hao SUN, Xiaozhu SHI, Haiying LIU, He LI. Calculation of GBAS vertical protection level based on multi-parameterstable distribution [J]. Systems Engineering and Electronics, 2021, 43(4): 1030-1035. |
| [12] | Renjie ZHAO, Kailong LI, Baiqing HU, Jiayu TIAN. SINS initial alignment algorithm based on improved quaternion damping error model [J]. Systems Engineering and Electronics, 2021, 43(11): 3330-3337. |
| [13] | Zhicheng LYU, Pengpeng LI, Lixun LI. Optimization design of satellite navigation system spot beam power enhancement signal parameters [J]. Systems Engineering and Electronics, 2021, 43(10): 2954-2960. |
| [14] | Zhihao XU, Zhaofa ZHOU, Zhenjun CHANG, Zihao XU. Carrier kinematics aided two-axis rotary modulation inertial navigation algorithm [J]. Systems Engineering and Electronics, 2020, 42(9): 2066-2070. |
| [15] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||