Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (9): 2573-2580.doi: 10.12305/j.issn.1001-506X.2021.09.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Processing technology of discontinuous satellite navigation signal under rotating condition
Heliang YUAN1,*, Tian JIN1, Jiaqing QU2, Hongli LYU3
- 1. School of Electronics and Information Engineering, Beihang University, Beijing 100083, China
2. Shanghai Radio Equipment Research Institute, Shanghai 201109, China
3. Xi'an Research Institute of Navigation Technology, Xi'an 710068, China
-
Received:2021-01-28Online:2021-08-20Published:2021-08-26 -
Contact:Heliang YUAN
CLC Number:
Cite this article
Heliang YUAN, Tian JIN, Jiaqing QU, Hongli LYU. Processing technology of discontinuous satellite navigation signal under rotating condition[J]. Systems Engineering and Electronics, 2021, 43(9): 2573-2580.
share this article
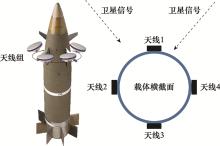
Fig.1
Diagram of antenna installation"
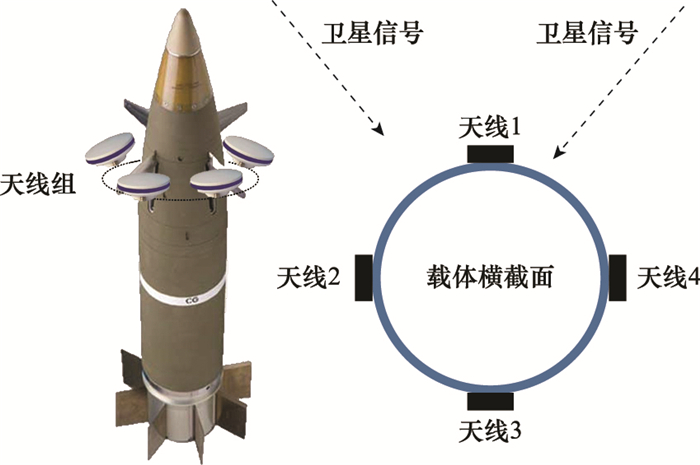
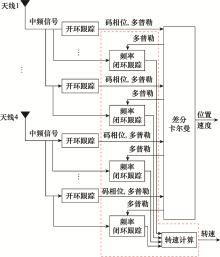
Fig.2
Overall framework of algorithm"
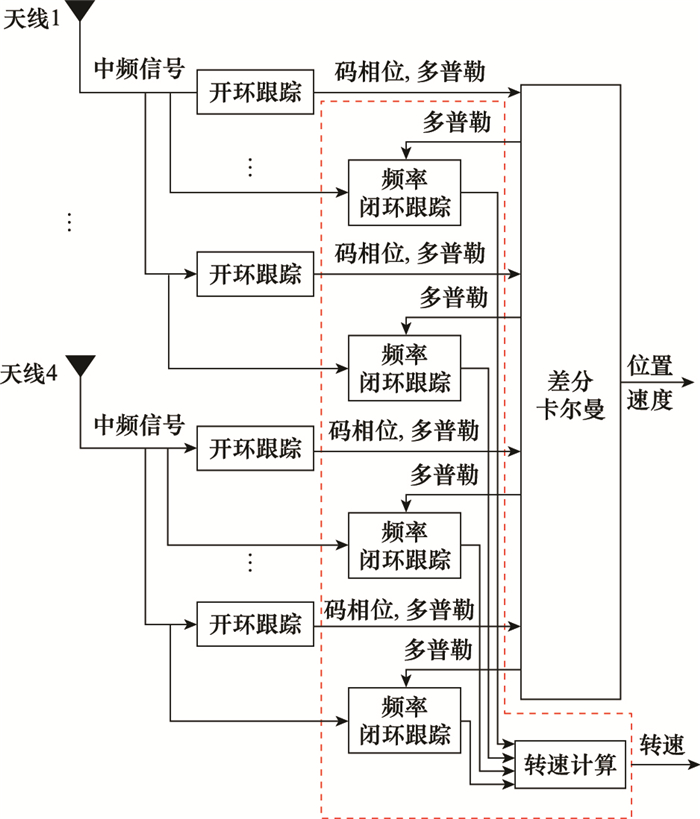
Fig.3
Doppler simulation results of satellite No.11 with four antennas"
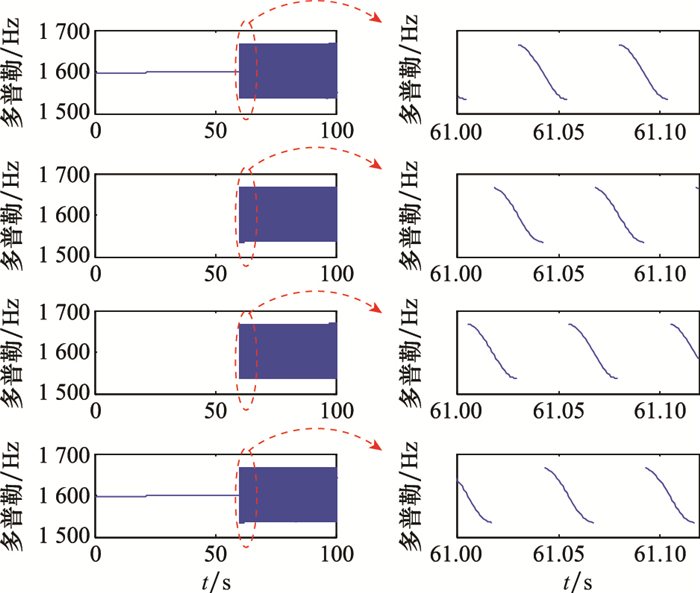
Fig.4
Comparison of the number of tracking satellites in simulation signal experiment"
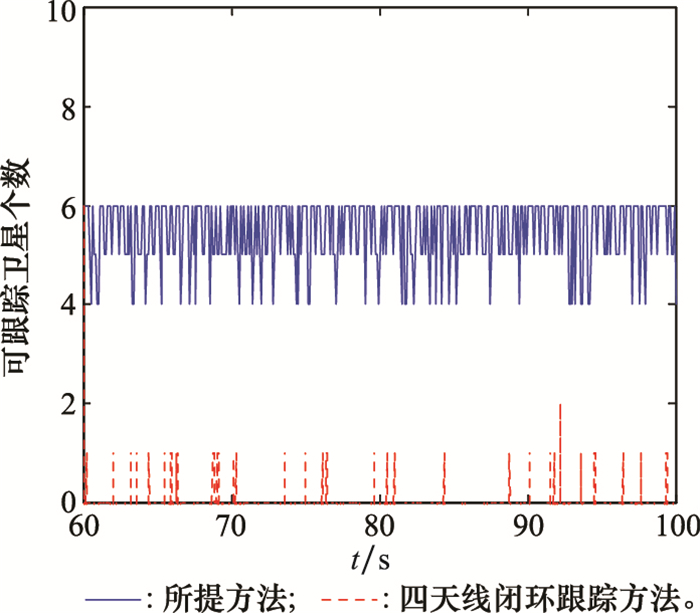
Fig.5
Three-dimensional position error in simulation signal experiment"
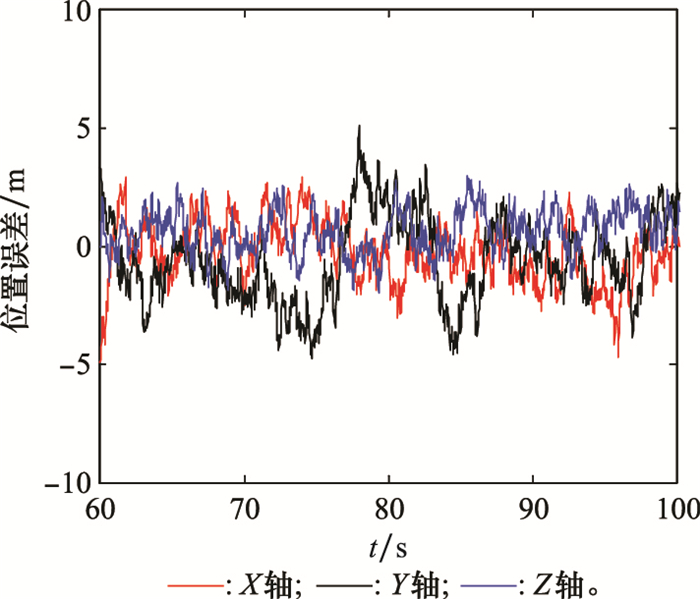
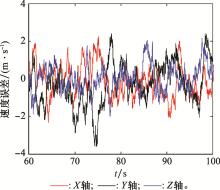
Fig.6
Three-dimensional speed error in simulation signal experiment"

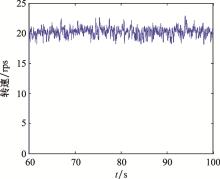
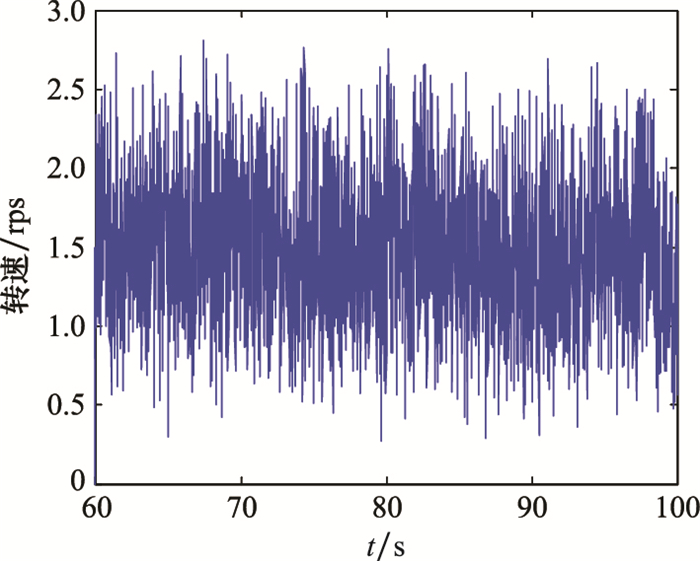
Fig.7
Roll rate estimation in simulation signal experiment"
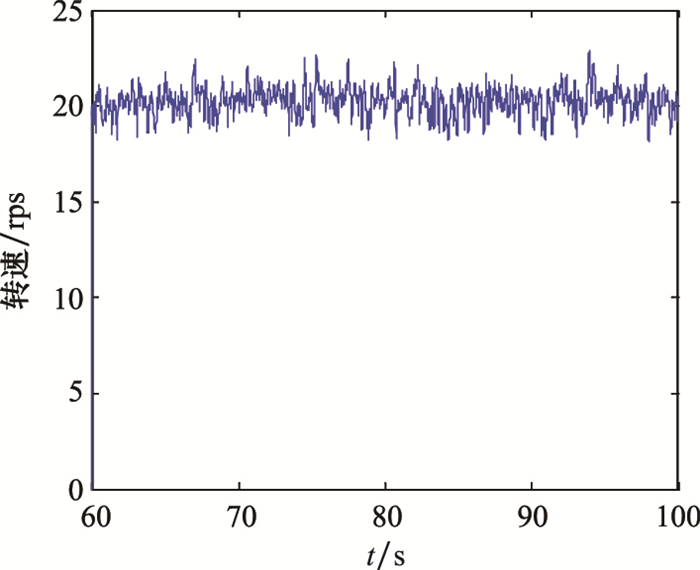
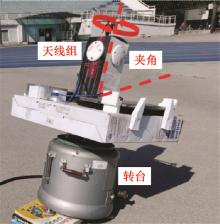
Fig.8
Schematic diagram of single axle table"

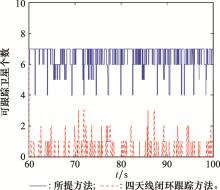
Fig.9
Comparison of the number of tracking satellites in real environment"

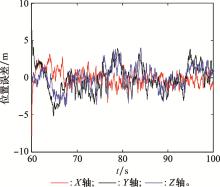
Fig.10
Three-dimensional position error in real environment"
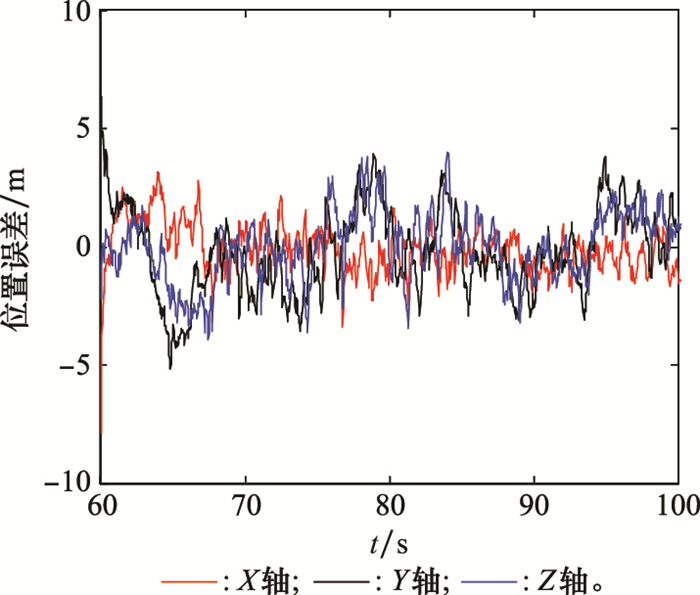
Fig.11
Three-dimensional speed error in real environment"
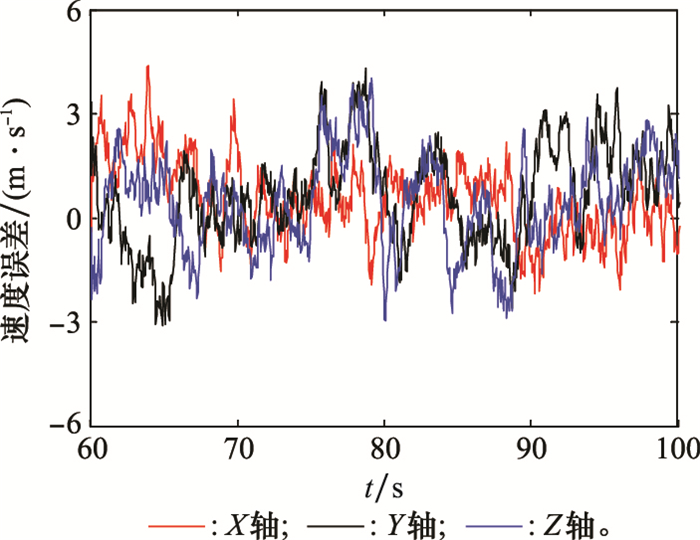
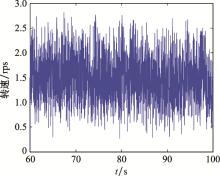
Fig.12
Roll rate estimation results in real environment"
| 1 | PARKINSON B W , ENGE P , AXELRAD P , et al. The global positioning system theory and applications[M]. America: American Institute of Aeronautics and Astronautics, 1996: 3- 27. |
| 2 | 李雪. 弹载GPS空间信息获取的关键技术[D]. 南京: 南京理工大学, 2011. |
| LI X. Key technologies of space information acquisition of missile borne GPS[D]. Nanjing: Nanjing University of Science & Technology, 2011. | |
| 3 | 彭博, 高欣宝, 张俊坤, 等. 卫星制导迫击炮弹修正执行机构综述[J]. 飞航导弹, 2015, 44 (4): 73- 77. |
| PENG B , GAO X B , ZHANG J S , et al. Review of satellite guided mortar shell correction actuator[J]. Aerodynamic Missile Journal, 2015, 44 (4): 73- 77. | |
| 4 | 郭庆伟, 王毅, 张磊, 等. 弹道修正引信技术发展综述[J]. 飞航导弹, 2016, 45 (10): 47- 51. |
| GUO Q W , WANG Y , ZHAGNG L , et al. Development of trajectory correction fuse technology[J]. Aerodynamic Missile Journal, 2016, 45 (10): 47- 51. | |
| 5 |
LEE S , JIN M , CHOI H H , et al. Design of roll rate estimator using GPS signal for spinning vehicle[J]. Journal of Positioning, Navigation, and Timing, 2016, 5 (3): 109- 118.
doi: 10.11003/JPNT.2016.5.3.109 |
| 6 | ZHAO H , SU Z . Real-time estimation of roll angle for trajectory correction projectile using radial magnetometers[J]. IET Radar, Sonar & Navigation, 2020, 14 (10): 1559- 1570. |
| 7 | AYKENAR M B, BOZ I C, SOYSAL G, et al. A multiple model approach for estimating roll rate of a very fast spinning artillery rocket[C]//Proc. of the IEEE 23rd International Conference on Information Fusion, 2020. |
| 8 | COMBETTES C, CHANGEY S, ADAM R, et al. Attitude and velocity estimation of a projectile using low cost magnetometers and accelerometers[C]//Proc. of the IEEE/ION Position, Location and Navigation Symposium, 2018: 650-657. |
| 9 |
ZHANG J Y , LI J , CHE X R , et al. The optimal design of modulation angular rate for MEMS-based rotary semi-SINS[J]. Micromachines, 2019, 10 (2): 111- 123.
doi: 10.3390/mi10020111 |
| 10 |
LIU F C , SU Z , ZHAO H , et al. Attitude measurement for high-spinning projectile with a hollow MEMS IMU consisting of multiple accelerometers and gyros[J]. Sensors, 2019, 19 (8): 1799- 1824.
doi: 10.3390/s19081799 |
| 11 |
MI J , LI J , ZHANG X , et al. Roll angular rate measurement for high spinning projectiles based on redundant gyroscope system[J]. Micromachines, 2020, 11 (10): 940- 959.
doi: 10.3390/mi11100940 |
| 12 | DOTY J H. Advanced spinning-vehicle navigation-a new technique in navigation of munitions[C]//Proc. of the 57th Annual Meeting of the Institute of Navigation, 2001: 745-754. |
| 13 | DOTY J H, MCGRAW G A. Spinning-vehicle navigation using apparent modulation of navigational signals[P]. U.S. : Patent 6, 520, 448, 2003-02-18. |
| 14 |
KIM J W , KANG H W , HWANG D H , et al. Signal tracking method of GNSS receivers for spinning vehicles[J]. International Journal of Control, Automation and Systems, 2012, 10 (3): 529- 535.
doi: 10.1007/s12555-012-0309-5 |
| 15 | LUO J, VANDER V W E, TSENG H W, et al. Single antenna GPS measurement of roll rate and roll angle of spinning platform[P]. U.S. : US9429660(B2), 2016-08-30. |
| 16 | OTHIENO N, GLEASON S. Combined doppler and time-free positioning technique for low dynamics receivers[C]//Proc. of IEEE/ION PLANS, 2012: 60-65. |
| 17 | VAN D F. Method and apparatus for time-free processing of GPS signals[P]. U.S. : Patent 6, 417, 801, 2002-07-09. |
| 18 |
SHEN Q , LI M , GONG R . GPS positioning algorithm for a spinning vehicle with discontinuous signals received by a single-patch antenna[J]. GPS Solutions, 2017, 21 (4): 1491- 1502.
doi: 10.1007/s10291-017-0623-8 |
| 19 | 龚如. 单天线旋转非连续接收条件卫星导航定位方法研究[D]. 北京: 北京理工大学, 2016. |
| GONG R. Research on GNSS positioning method for spinning single patch antenna and discontinuous signal received[D]. Beijing: Beijing Institute of Technology, 2016. | |
| 20 | ALEXANDER S B, RICHAR R. Systems and methods for determining a rotational position of an object[P]. U.S. : US8199052, 2012-06-12. |
| 21 |
DENG Z , SHEN Q , DENG Z . Roll angle measurement for a spinning vehicle based on GPS signals received by a single-patch antenna[J]. Sensors, 2018, 18 (10): 3479- 3501.
doi: 10.3390/s18103479 |
| 22 | HONG J H , KIM Y J , RYOO C K . Roll angle estimation for smart projectiles using a single patch antenna[J]. Journal of Guidance, Control, and Dynamics, 2020, 43 (6): 1- 9. |
| 23 | IM H C, CHOI Y S, LEE S J. Spin effects of GPS signals on a multi-antenna mounted vehicle[C]//Proc. of the IEEE Position, Location & Navigation Symposium, 2016: 55-60. |
| 24 | IM H C , LEE S J . GPS signal tracking on a multi-antenna mounted spinning vehicle by compensating for the spin effects[J]. In-ternational Journal of Control Automation & Systems, 2018, 16 (2): 867- 874. |
| 25 |
刘旭东, 赵军祥. 旋转载体多天线对GPS卫星可见性分析[J]. 全球定位系统, 2009, 34 (5): 11- 14.
doi: 10.3969/j.issn.1008-9268.2009.05.003 |
|
LIU X D , ZHAO J X . GPS satellites visibility analysis for multi-antenna rotating carrier[J]. GNSS World of China, 2009, 34 (5): 11- 14.
doi: 10.3969/j.issn.1008-9268.2009.05.003 |
|
| 26 | FENTON P C, KUNYSZ W. Method and apparatus using GPS to determine position and attitude of a rotating vehicle[P]. Europe: EP1114330, 2001-07-11. |
| 27 | 蔡乃小. 基于卫星导航的转动物体运动速度测量方法以及系统[P]. 中国: |
| CN107479083A, 2017-12-15. CAI N X. Measurement and system of speed of rotating vehicle based on satellite navigation[P]. China: CN107479083A, 2017-12-15. | |
| 28 | WALLACE V V, JOHN C, HUAN W T, et al. GPS-based measurement of roll rate and roll angle of spinning platforms[P]. U.S. : US7994971, 2001-07-11. |
| 29 |
JIN T , YUAN H , LING K V , et al. Differential Kalman filter design for GNSS open loop tracking[J]. Remote Sensing, 2020, 12 (5): 812- 834.
doi: 10.3390/rs12050812 |
| 30 | 王猛. 旋转载体单天线GPS接收信号分析与模拟[D]. 北京: 北京理工大学, 2008. |
| WANG M. Analysis and simulation of single antenna GPS receiving signal on rotating carrier[D]. Beijing: Beijing Institute of Technology, 2008. |
| [1] | Qinglong ZHANG, Yuming WANG, Erwei CHENG, Yazhou CHEN, Liyun MA. Investigation on the effect law and prediction method of out-of-band electromagnetic interference in navigation receiver [J]. Systems Engineering and Electronics, 2021, 43(9): 2588-2593. |
| [2] | Wenyi WANG, Jing GONG, Jinming WANG. GNSS spoofing interference detection based on variance of SCB [J]. Systems Engineering and Electronics, 2021, 43(8): 2254-2262. |
| [3] | Yu SU, Wenfang JING, Xiaochun LU, Yang ZHANG. Carrier frequency accuracy improvement algorithm based on BP-PID control [J]. Systems Engineering and Electronics, 2021, 43(7): 1894-1903. |
| [4] | Hao SUN, Xiaozhu SHI, Haiying LIU, He LI. Calculation of GBAS vertical protection level based on multi-parameterstable distribution [J]. Systems Engineering and Electronics, 2021, 43(4): 1030-1035. |
| [5] | Zhicheng LYU, Pengpeng LI, Lixun LI. Optimization design of satellite navigation system spot beam power enhancement signal parameters [J]. Systems Engineering and Electronics, 2021, 43(10): 2954-2960. |
| [6] | Qinglong ZHANG, Erwei CHENG, Yuming WANG, Yazhou CHEN, Liyun MA. Research on the electromagnetic interference effect of UAV satellite navigation system [J]. Systems Engineering and Electronics, 2020, 42(12): 2684-2691. |
| [7] | WANG Linyu, GUO Hao, XIANG Jianhong, QI Liangang. Anti-jamming technology based on genetic matrix adjoint inversion algorithm [J]. Systems Engineering and Electronics, 2017, 39(8): 1677-1683. |
| [8] | TANG Chengkai, ZHANG Lingling, LIAN Baowang. Cooperation factor map of co-location aided single -satellite navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(5): 1085-1090. |
| [9] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| [10] | LIU Ke, WU Wenqi, TANG Kanghua, WU Zhijia, ZHANG Shihao. GNSS dual-receiver against repeater deception jamming detection algorithm based on pseudo-range information [J]. Systems Engineering and Electronics, 2017, 39(11): 2393-2398. |
| [11] | HU Yan-feng, CAO Ke-jin, BIAN Shao-feng, LI Bao, YE Xin. GNSS spoofing detection algorithm based on clock frequency drift monitoring [J]. Systems Engineering and Electronics, 2015, 37(7): 1629-1632. |
| [12] | FAN Guang-wei, YU Bao-guo, CHAO Lei, DENG Zhi-xin. Design of interference recognition and classification filter of satellite navigation electromagnetic environment [J]. Systems Engineering and Electronics, 2014, 36(2): 234-238. |
| [13] | HOU Hong-tao,WANG Wei-ping,ZHOU Hong-wei,LI Qun. Architecture of portability for performance simulation of satellite navigation systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(1): 217-0221. |
| [14] | HU Xiu-lin, RAN Yi-hang, LIU Yu-qi, KE Ting. New option for modulation in GNSS signal design [J]. Journal of Systems Engineering and Electronics, 2010, 32(9): 1962-1967. |
| [15] | FENG Qi, ZHU Chang, YUAN Nai-chang. Design of anti-jamming adaptive antennas for GPS receivers [J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1556-1559. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||