Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (12): 3603-3613.doi: 10.12305/j.issn.1001-506X.2022.12.03
• Electronic Technology • Previous Articles Next Articles
Multiple model based generalized labeled multi-Bernoulli filter
Huaisheng XIN*, Penghan SONG, Chen CAO
- China Academy of Electronics and Information Technology, Beijing 100041, China
-
Received:2021-09-05Online:2022-11-14Published:2022-11-24 -
Contact:Huaisheng XIN
CLC Number:
Cite this article
Huaisheng XIN, Penghan SONG, Chen CAO. Multiple model based generalized labeled multi-Bernoulli filter[J]. Systems Engineering and Electronics, 2022, 44(12): 3603-3613.
share this article
Table 1
Initial states of all targets"
| 目标 | 初始状态/(m, m/s, m, m/s) | 出现时刻/s | 消失时刻/s |
| 1 | [50 000, 200, 50 000, 0] | 0 | 250 |
| 2 | [40 000, 100, 52 200, -100] | 0 | 300 |
| 3 | [45 000, 200, 55 000, -50] | 0 | 300 |
| 4 | [70 000, 200, 40 000, 0] | 80 | 300 |
| 5 | [80 000, 200, 41 000, 0] | 0 | 300 |

Fig.1
Target motion model jumping sequence"
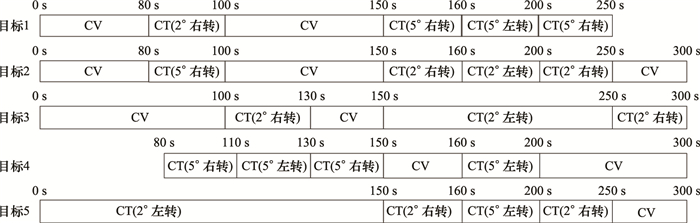
Fig.2
Targets' trajectories"
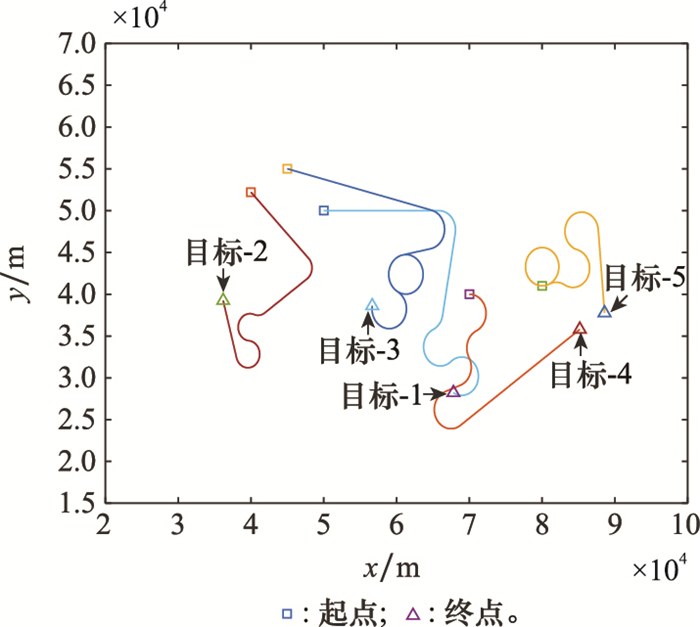
Table 2
Comparison of average computational time of four MM-GLMB filters (λ=5) s"
| JMS-GLMB | IMM-GLMB | GPB1-GLMB | GPB2-GLMB |
| 3.988 | 2.054 | 1.883 | 3.267 |
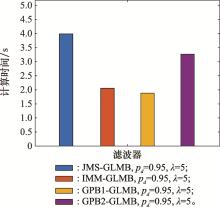
Fig.3
Comparison of computational cost of time of four MM-GLMB filters (λ=5)"
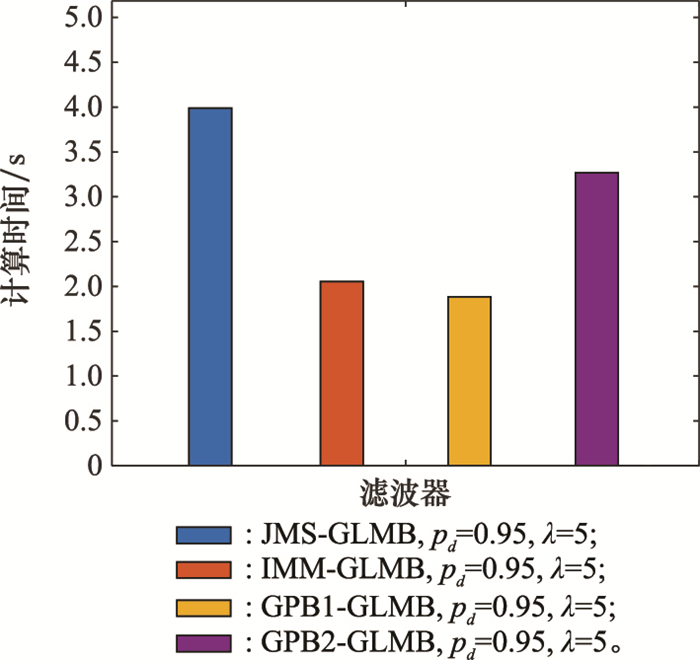
Fig.4
OSPA trajectory tracking error comparison of four MM-GLMB filters"
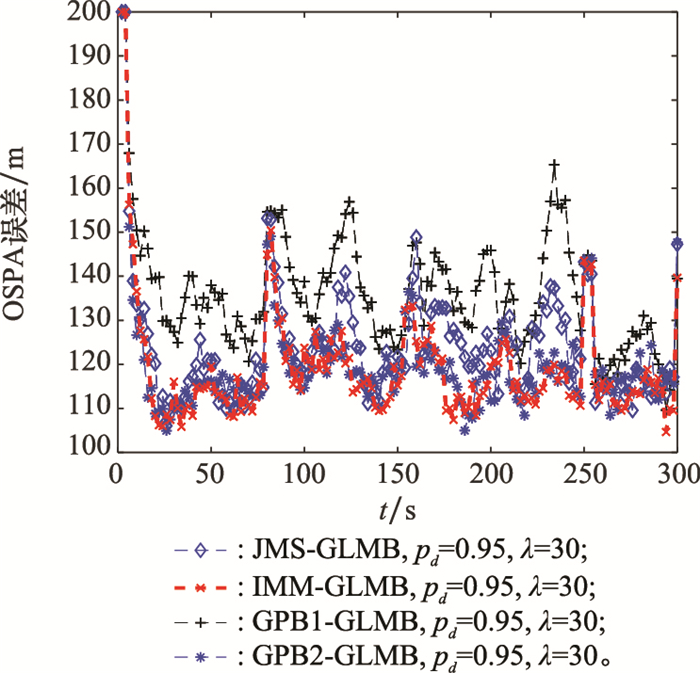
Table 3
Comparison of average computational time of four MM-GLMB filters (λ=30) s"
| JMS-GLMB | IMM-GLMB | GPB1-GLMB | GPB2-GLMB |
| 7.001 | 4.247 | 3.884 | 5.645 |
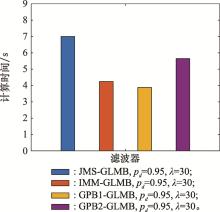
Fig.5
Comparison of computational cost of time of four MM-GLMB filters (λ=30)"
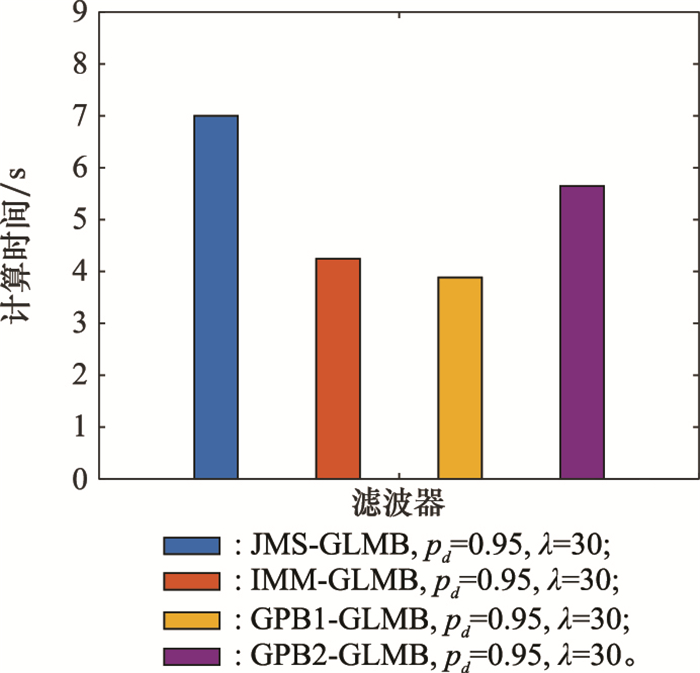

Fig.6
OSPA trajectory tracking error comparison of for MM-GLMB filters(high clutter ratio)"
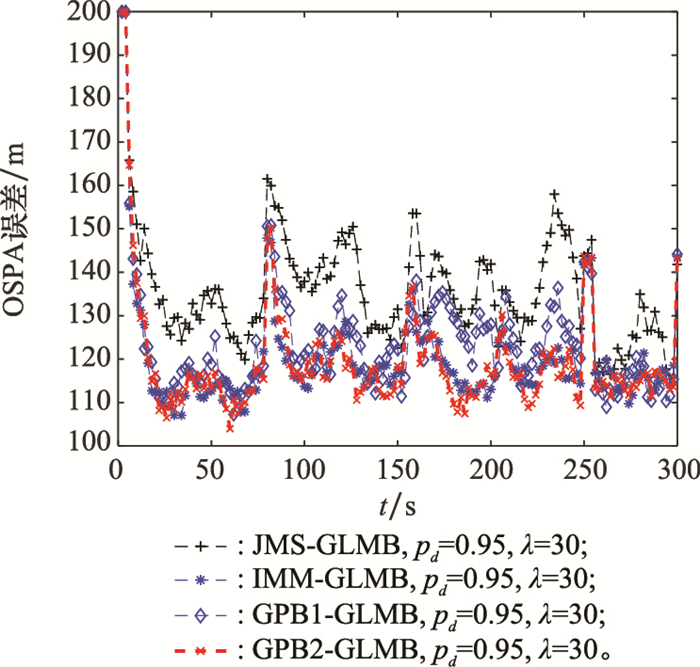
Table 4
Comparison of average computational time of four MM-GLMB filters (pd=0.75) s"
| JMS-GLMB | IMM-GLMB | GPB1-GLMB | GPB2-GLMB |
| 5.412 | 1.960 | 1.939 | 3.156 |
Fig.7
Comparison of computational cost of time of four MM-GLMB filters (pd=0.75)"
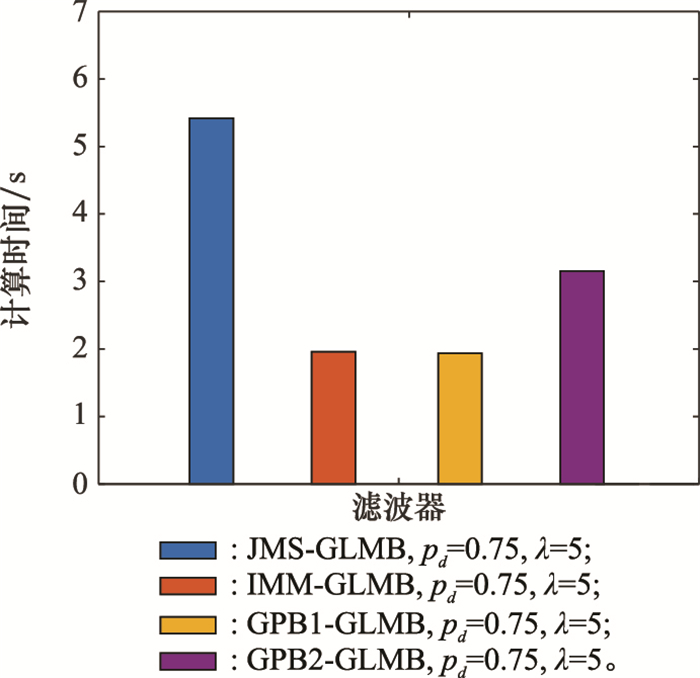
Fig.8
OSPA trajectory tracking error comparison of four MM-GLMB filters (low detection probability)"
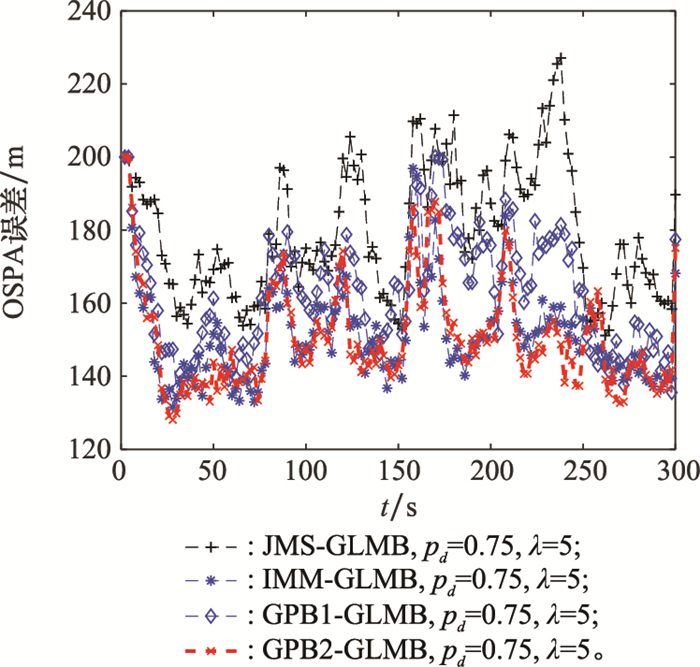
Table 5
Average TOSPA error of track tracking m"
| 参数 | JMS-GLMB | IMM-GLMB | GPB1-GLMB | GPB2-GLMB |
| λ=5, pd=0.95 | 124.30 | 107.21 | 113.2 | 106.29 |
| λ=30, pd=0.95 | 136.81 | 119.95 | 123.21 | 119.21 |
| λ=5, pd=0.75 | 178.43 | 152.77 | 161.70 | 151.81 |

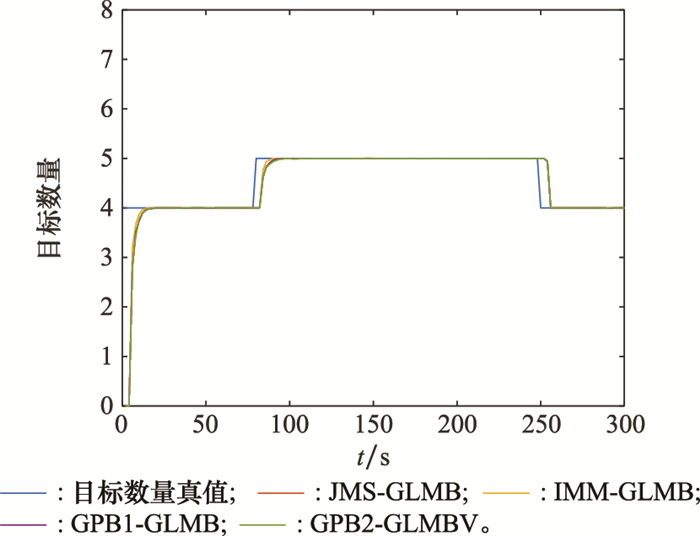
Fig.9
Average target number estimation comparison"
| 1 | MAHLER R . Statistical multisource-multitarget information fusion[M]. Norwood: Artech House, 2007. |
| 2 |
VO B T , VO B N . Labeled random finite sets and multi-object conjugate priors[J]. IEEE Trans.on Signal Processing, 2013, 61 (13): 3460- 3475.
doi: 10.1109/TSP.2013.2259822 |
| 3 |
VO B N , VO B T , PHUNG D . Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (24): 6554- 6567.
doi: 10.1109/TSP.2014.2364014 |
| 4 | HOANG H G, VO B T, VO B N. A fast implementation of the generalized labeled multi-Bernoulli filter with joint prediction and update[C]//Proc. of the 18th International Conference on Information Fusion, 2015: 999-1006. |
| 5 | MACAULAY R J , DENLINGER E . A decision-directed adaptive tracker[J]. IEEE Trans.on Aerospace and Electronic Systems, 1973, 9 (2): 229- 236. |
| 6 |
PUNITHAKUMAR K , KIRUBARAJAN T , SINHA A . Multiple-model probability hypothesis density filter for tracking maneuvering targets[J]. IEEE Trans.on Aerospace and Electronic Systems, 2008, 44 (1): 87- 98.
doi: 10.1109/TAES.2008.4516991 |
| 7 |
PASHA S , VO B N , TUAN H D , et al. A Gaussian mixture PHD filter for jump Markov system models[J]. IEEE Trans.on Aerospace and Electronic Systems, 2009, 45 (3): 919- 936.
doi: 10.1109/TAES.2009.5259174 |
| 8 |
WOOD T M . Interacting methods for manoeuvre handling in the GM-PHD filter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2011, 47 (4): 3021- 3025.
doi: 10.1109/TAES.2011.6034685 |
| 9 |
SITHIRAVEL R , MACDONALD M , BALAJI B , et al. Multiple model spline probability hypothesis density filter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2016, 52 (3): 1210- 1226.
doi: 10.1109/TAES.2016.140750 |
| 10 |
GEORGESCU R , WILLETT P . The multiple model CPHD tracker[J]. IEEE Trans.on Signal Processing, 2012, 60 (4): 1741- 1751.
doi: 10.1109/TSP.2012.2183128 |
| 11 |
DUNNE D , KIRUBARAJAN T . Multiple model multi-Bernoulli filters for manoeuvering targets[J]. IEEE Trans.on Ae-rospace and Electronic Systems, 2013, 49 (4): 2679- 2692.
doi: 10.1109/TAES.2013.6621845 |
| 12 | YANG J L , JI H B , GE H W . Multi-model particle cardinality-balanced multi-target multi-Bernoulli algorithm for multiple manoeuvring target tracking[J]. IET Radar, Sonar & Navigation, 2013, 7 (2): 101- 112. |
| 13 | REUTER S, SCHEEL A, DIETMAYER K. The multiple model labeled multi-Bernoulli filter[C]//Proc. of the 18th International Conference on Information Fusion, 2015: 1574-1580. |
| 14 |
邱昊, 黄高明, 左炜, 等. 多模型标签多伯努利机动目标跟踪算法[J]. 系统工程与电子技术, 2015, 37 (12): 2683- 2688.
doi: 10.3969/j.issn.1001-506X.2015.12.03 |
|
QIU H , HUANG G M , ZUO W , et al. Multiple model labeled multi-Bernoulli filter for maneuvering target tracking[J]. Systems Engineering and Electronics, 2015, 37 (12): 2683- 2688.
doi: 10.3969/j.issn.1001-506X.2015.12.03 |
|
| 15 |
LIU Z X , HUANG B J . The labeled multi-Bernoulli filter for jump Markov systems under glint noise[J]. IEEE Access, 2019, 7, 92322- 92328.
doi: 10.1109/ACCESS.2019.2928334 |
| 16 | PUNCHIHEWA Y, VO B N, VO B T. A generalized labeled multi-Bernoulli filter for maneuvering targets[C]//Proc. of the 19th International Conference on Information Fusion, 2016: 980-986. |
| 17 |
YI W , JIANG M , HOSEINNERZHAD R . The multiple model Vo-Vo filter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (2): 1045- 1054.
doi: 10.1109/TAES.2017.2667300 |
| 18 |
WU W H , SUN H M , CAI Y C , et al. Tracking multiple maneuvering targets gidden in the DBZ based on the MM-GLMB filter[J]. IEEE Trans.on Signal Processing, 2020, 68, 2912- 2924.
doi: 10.1109/TSP.2020.2988635 |
| 19 | BAR-SHALOM Y , LI X , KIRUBARAJAN T . Estimation with applications to tracking and navigation[M]. New York: Wiley, 2001. |
| 20 |
GENDEREN J V . Tracking and data fusion: a handbook of algorithms[J]. International Journal of Image and Data Fusion, 2013, 4 (1): 102- 104.
doi: 10.1080/19479832.2012.749304 |
| 21 | LI X R . Engineer's guide to variable-structure multiple-model estimation for tracking[J]. Multitarget-Multisensor Tracking: Applications and Advances, 2000, 3, 449- 567. |
| 22 |
MAZOR E , AVERBUCH A , BAR-SHALOM Y , et al. Inte-racting multiple model methods in target tracking: a survey[J]. IEEE Trans.on Aerospace and Electronic Systems, 1998, 34 (1): 103- 123.
doi: 10.1109/7.640267 |
| 23 |
LI X R , JILKOV V P . A survey of maneuvering target tracking, part V: multiple-model methods[J]. IEEE Trans.on Aero-space and Electronic Systems, 2005, 41 (4): 1255- 1321.
doi: 10.1109/TAES.2005.1561886 |
| 24 |
ACKERSON G , FU K . On state estimation in switching environments[J]. IEEE Trans.on Automatic Control, 1970, 15 (1): 10- 17.
doi: 10.1109/TAC.1970.1099359 |
| 25 | RISTIC B, VO B, CLARK D. Performance evaluation of multi-target tracking using the OSPA metric[C]//Proc. of the 13th International Conference on Information Fusion, 2010. |
| [1] | Zhuling QIU, Yufei ZHA, Zhenyu LI, Yuming LI, Peng ZHANG, Chuan ZHU. Temporal regularized correlation filter tracking algorithm based on multi-model distillation [J]. Systems Engineering and Electronics, 2022, 44(8): 2448-2456. |
| [2] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [3] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [4] | Shuai WANG, Jianjun XIANG, Fang PENG, Shujuan TANG. Target tracking algorithm based on a new steepest descent method [J]. Systems Engineering and Electronics, 2022, 44(5): 1512-1519. |
| [5] | Huaisheng XIN, Chen CAO. Interacting multiple model based grouping δ-generalized labeledmulti-Bernoulli algorithm [J]. Systems Engineering and Electronics, 2022, 44(4): 1128-1138. |
| [6] | Jiahao XIE, Shucai HUANG, Daozhi WEI, Zhaoyu ZHANG, Wenhao WANG. Solution for uncertain hybrid multi-sensor alliance based on PEV principle [J]. Systems Engineering and Electronics, 2022, 44(3): 819-826. |
| [7] | Zizhuang SONG, Jiawei YANG, Dongfang ZHANG, Shiqiang WANG, Shuo ZHANG. Real-time infrared multi-class multi-target anchor-free tracking network [J]. Systems Engineering and Electronics, 2022, 44(2): 401-409. |
| [8] | Haonan LIU, Liping SONG. Group structure update model and group target tracking algorithm based on kernel Fisher discriminant [J]. Systems Engineering and Electronics, 2022, 44(10): 3012-3019. |
| [9] | Cheng FANG, Wen LU, Jingying JI, Yumeng SONG, Feifei LIANG, Zhiwei LUO. Correlation filter-tracking algorithm based on appearance similarity update [J]. Systems Engineering and Electronics, 2022, 44(1): 117-126. |
| [10] | Yuexin ZHAO, Wangdong QI, Peng LIU, En YUAN, Bing XU. Quadratic constraint Kalman filter algorithm for three dimensional AoA target tracking [J]. Systems Engineering and Electronics, 2021, 43(8): 2263-2272. |
| [11] | Mingjie SUN, Lin ZHOU, Jinling GU, Peigeng LI. Infrared target tracking algorithm based on multi-domain network [J]. Systems Engineering and Electronics, 2021, 43(5): 1176-1183. |
| [12] | Yu LU, Haibin WANG. Maneuvering target tracking algorithm for airborne passive coherent localization system [J]. Systems Engineering and Electronics, 2021, 43(4): 875-882. |
| [13] | Weishi CHEN, Yifeng HUANG, Xiaolong CHEN, Xianfeng LU, Jie ZHANG. Low-altitude target classification based on model conversion frequency estimation [J]. Systems Engineering and Electronics, 2021, 43(4): 927-936. |
| [14] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking control of multi-UAV formation with prescribed performance guarantees [J]. Systems Engineering and Electronics, 2021, 43(4): 1069-1079. |
| [15] | Jisan LI, Wenbin CAI, Lixiang GENG, Rong LIU, Yuan REN. Variable date rate target tracking algorithm for rotating phased array radar [J]. Systems Engineering and Electronics, 2021, 43(3): 676-683. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||