Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (12): 4166-4173.doi: 10.12305/j.issn.1001-506X.2025.12.28
• Guidance, Navigation and Control • Previous Articles
Ultrasonic motor ADRC based on improved whale optimization algorithm
Jianxin FENG, Haoyang LI, Jianxiong GONG, Baichun GONG
- Academy of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
-
Received:2024-07-17Revised:2024-11-01Online:2025-01-02Published:2025-01-02 -
Contact:Jianxin FENG
CLC Number:
Cite this article
Jianxin FENG, Haoyang LI, Jianxiong GONG, Baichun GONG. Ultrasonic motor ADRC based on improved whale optimization algorithm[J]. Systems Engineering and Electronics, 2025, 47(12): 4166-4173.
share this article
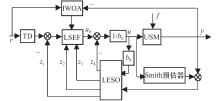
Fig.1
Overall structure of controller"
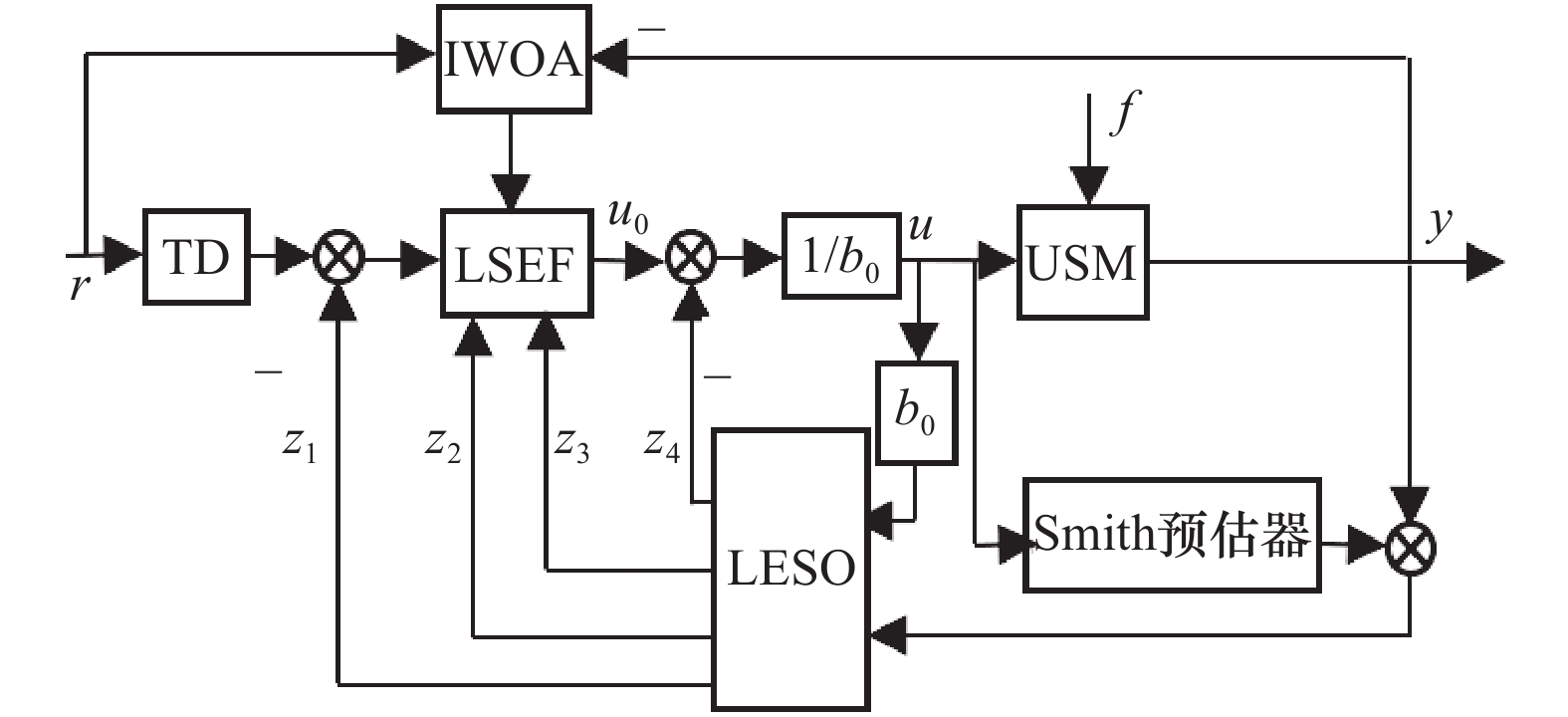
Table 1
Standard test function"
| 函数 | 维数 | 取值范围 | 理论极值 |
| 30 | [−100,100] | 0 | |
| 30 | [−10,10] | 0 | |
| 30 | [−100,100] | 0 | |
| 30 | [−5.12,5.12] | 0 | |
| 30 | [−32,32] | 0 | |
| 30 | [−600,600] | 0 |
Table 2
Results of standard test function"
| 函数 | 算法 | 最优值 | 平均值 | 最差值 | 标准差 |
| PSO | 3.03e-08 | 2.24e-07 | 1.05e-06 | 2.30e-07 | |
| DA | 1.99e+03 | 6.67e+03 | 1.42e+04 | 2.82e+03 | |
| WOA | 4.43e-29 | 3.37e-22 | 8.59e-21 | 1.57e-21 | |
| IWOA | 1.48e-96 | 1.14e-90 | 2.04e-89 | 3.78e-90 | |
| PSO | 2.10e-06 | 3.45e-05 | 1.89e-04 | 3.82e-05 | |
| DA | 5.854 | 31.988 | 1.14e+02 | 21.883 | |
| WOA | 4.97e-22 | 4.22e-18 | 6.59e-17 | 1.27e-17 | |
| IWOA | 1.07e-54 | 8.95e-50 | 2.54e-48 | 4.63e-49 | |
| PSO | 0.378 | 1.109 | 2.894 | 0.555 | |
| DA | 27.766 | 45.619 | 63.310 | 10.540 | |
| WOA | 2.947 | 64.288 | 89.807 | 23.532 | |
| IWOA | 8.27e-34 | 4.40e-31 | 2.71e-30 | 6.36e-31 | |
| PSO | 16.141 | 35.717 | 1.42e+02 | 22.838 | |
| DA | 1.22e+02 | 2.08e+02 | 3.14e+02 | 49.175 | |
| WOA | 0 | 16.167 | 2.51e+02 | 60.753 | |
| IWOA | 0 | 0 | 0 | 0 | |
| PSO | 6.41e-05 | 11.976 | 19.967 | 9.945 | |
| DA | 8.665 | 14.713 | 18.182 | 1.955 | |
| WOA | 1.47e-14 | 1.84e-12 | 3.66e-11 | 6.70e-12 | |
| IWOA | 4.44e-16 | 2.69e-15 | 4.00e-15 | 1.74e-15 | |
| PSO | 5.42e-08 | 0.012 | 0.042 | 0.013 | |
| DA | 18.519 | 60.228 | 1.23e+02 | 23.219 | |
| WOA | 0 | 1.48e-17 | 1.11e-16 | 3.84e-17 | |
| IWOA | 0 | 0 | 0 | 0 |
Table 3
LuGre model parameters"
| 2.444 | 0.599 | 0.010 | 0.477 | 0.270 | 0.005 |
Table 4
Step signal parameter optimization results"
| 参数 | WOA | DA | IWOA | PSO |
| 3 028.663 | 2 054.116 | 8 175.719 | 9 910.667 | |
| 1 262 280 | 1 200 767 | 922 164.9 | 663 146.6 | |
| 317.715 | 393.607 | 294.318 | 400 | |
| 100.837 | 144.513 | 300.293 | 171.269 | |
| 283.867 | 295.213 | 302.659 | 205.391 | |
| 1 419.399 | 671.389 | 401.082 | ||
| 0.003 | 0.002 85 | 0.002 317 | 0.001 554 | |
| 最小适应度值 | 0.000 228 | 0.000 256 | 0.000 146 | 0.000 178 |
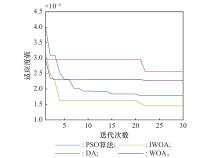
Fig.2
Adaptation value convergence curve when tracking step signal"
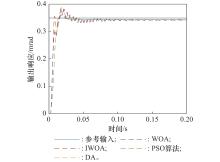
Fig.3
Step response comparison"
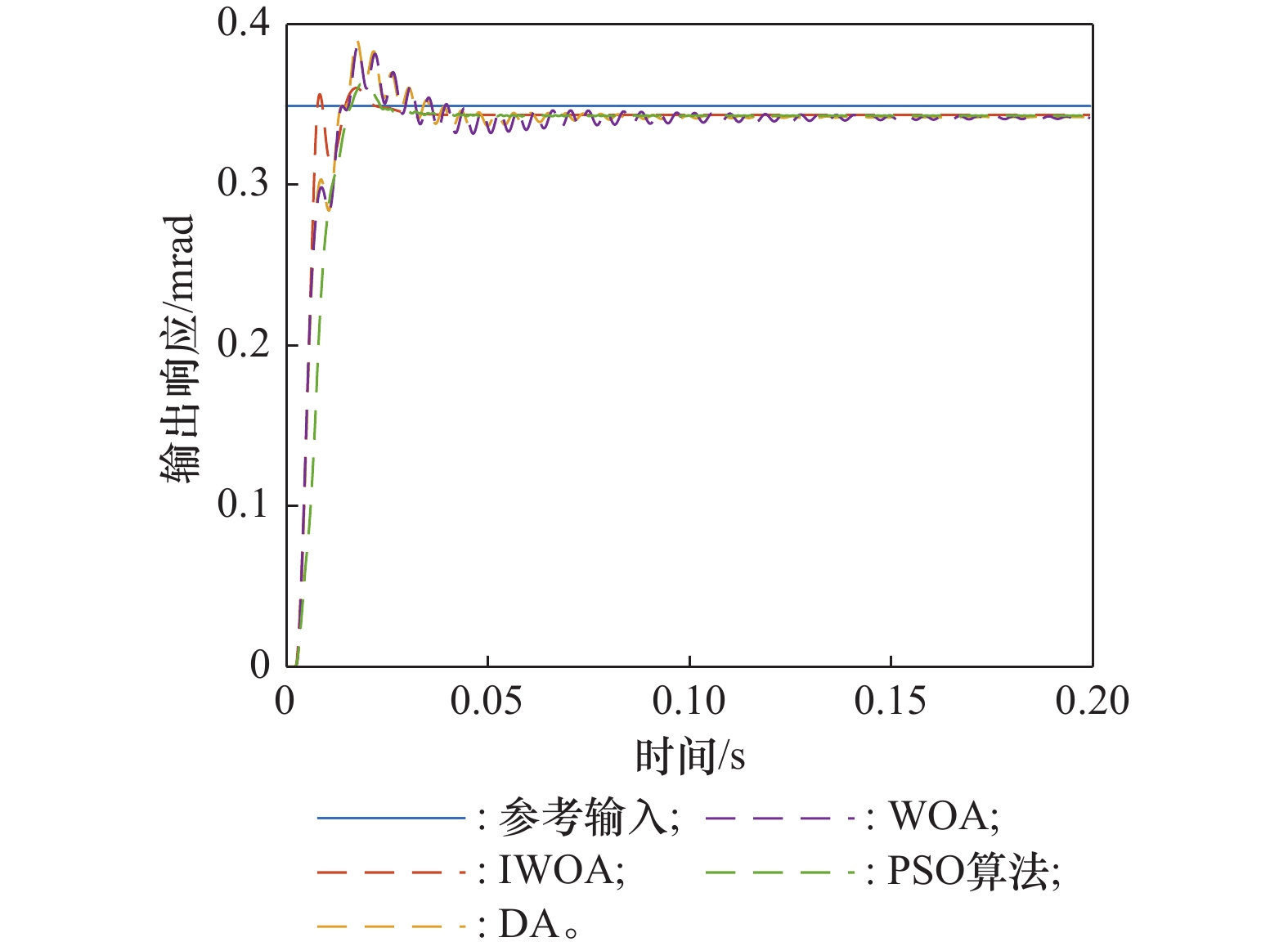
Table 5
Sine signal parameter optimization results"
| 参数 | WOA | DA | IWOA | PSO |
| 5 440.736 | 17 365.56 | 18 637.47 | 18 907.12 | |
| 1 186 601 | 2 000 000 | 1 923 256 | 1 361 394 | |
| 124.408 | 122.927 | 146.170 | 71.383 | |
| 272.092 | 57.556 | 50 | 71.383 | |
| 247.850 | 256.410 | 50 | 72.712 | |
| 5 647.49 | 8 136.524 | 10 000 | 8 934.579 | |
| 0.000 778 | 0.000 541 | 0.000 11 | 0.000 18 | |
| 最小适应度值 | 1.488 | 0.934 | 0.196 | 0.349 |
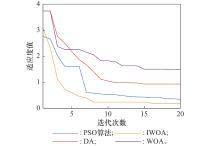
Fig.4
Adaptation value convergence curve when tracking sine signal"
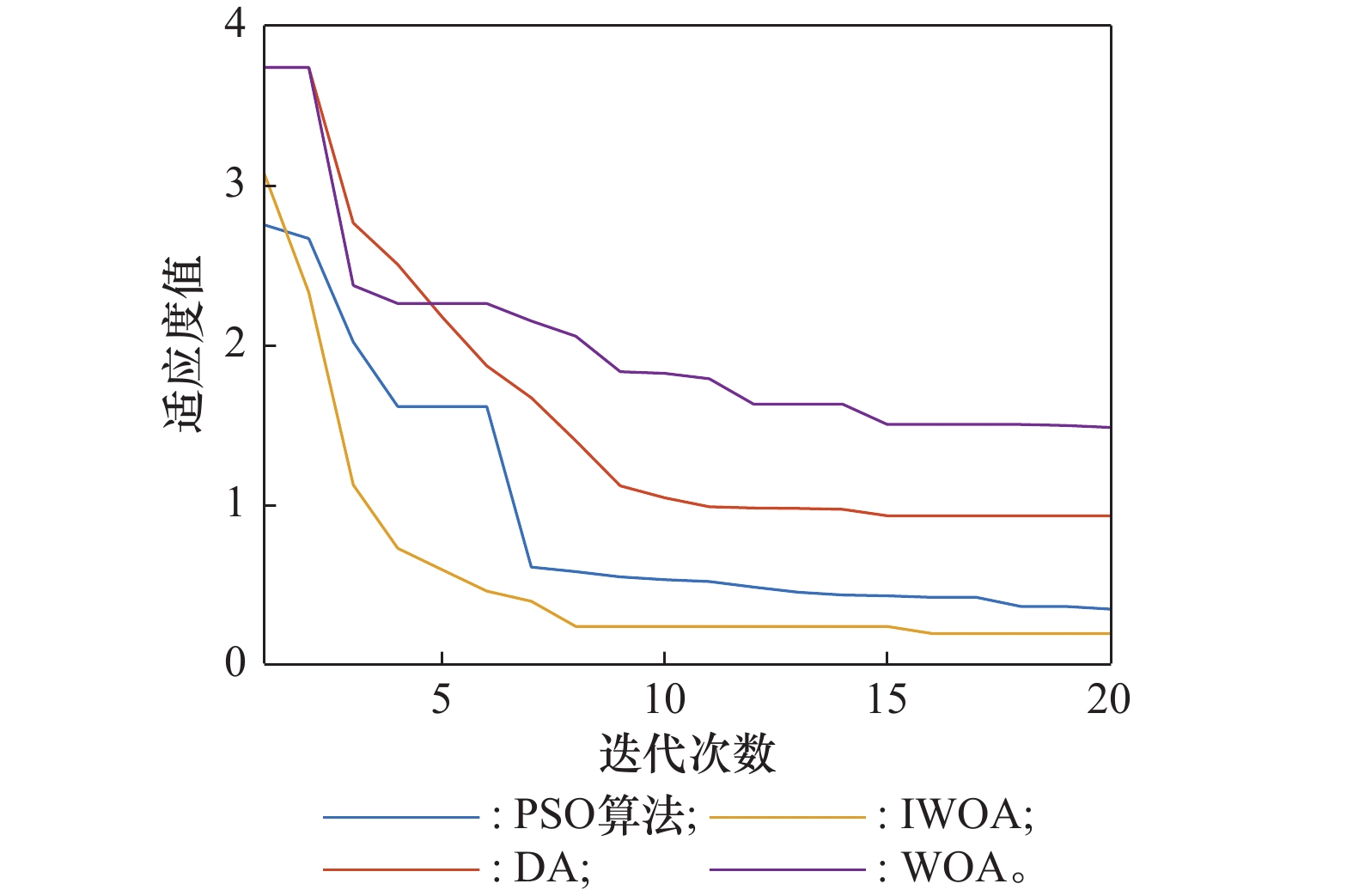

Fig.5
Comparison of position error when tracking sine signals"
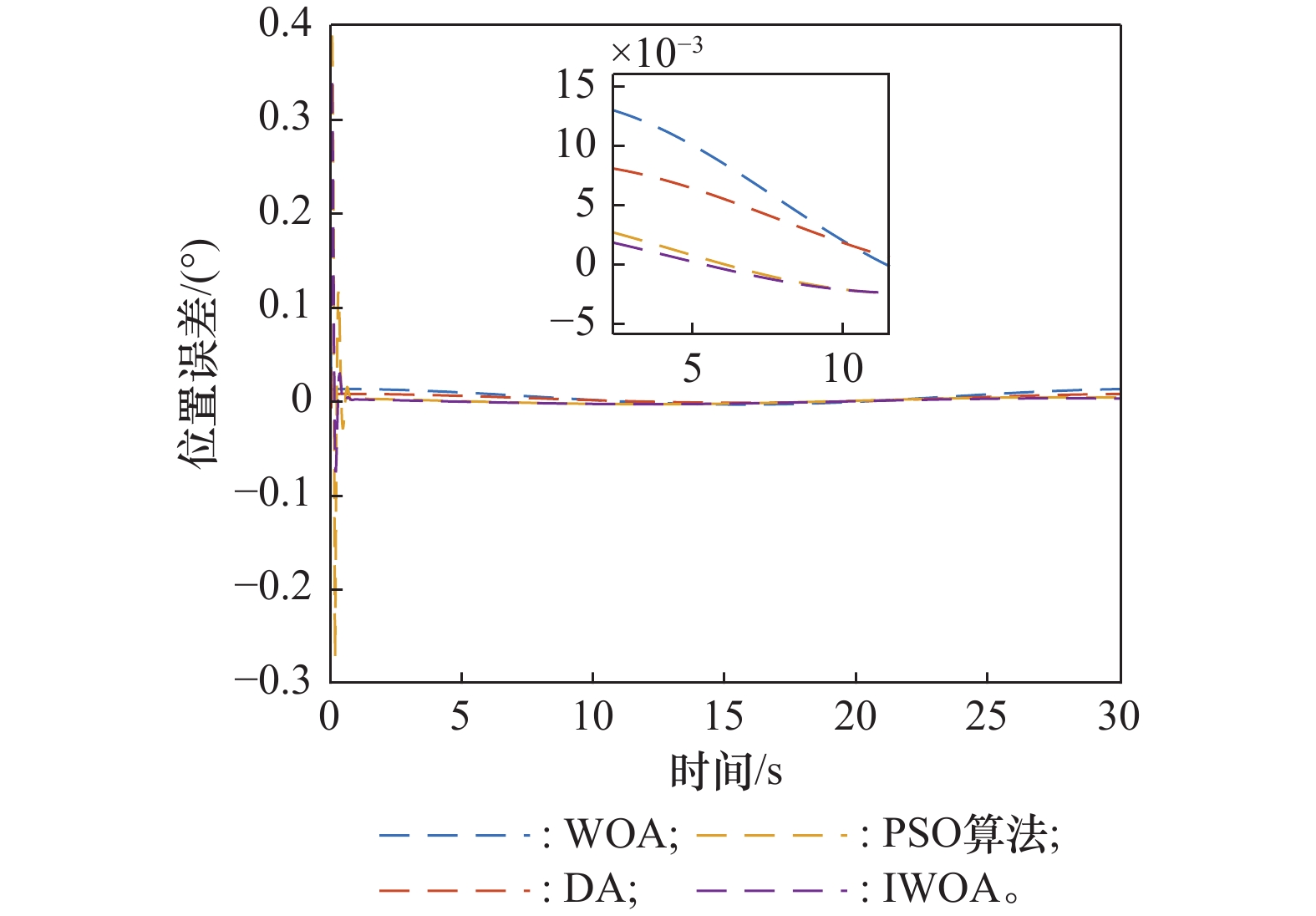
Table 6
Ramp signal parameter optimization results"
| 参数 | WOA | DA | IWOA | PSO |
| 4 326.858 | 1 915.435 | 3 962.961 | 1 968.237 | |
| 1 887 034 | 2 000 000 | 1 958 052 | 1 904 391 | |
| 356.406 | 245.044 | 279.786 | 394.016 | |
| 112.821 | 370.728 | 127.205 | 50 | |
| 301.659 | 147.956 | 223.953 | 378.960 | |
| 737.748 | 2 978.886 | 2 967.428 | 2 116.098 | |
| 0.000 186 | 0.000 02 | 0.000 016 | 0.000 089 | |
| 最小适应度值 | 0.000 128 | 0.000 044 | 0.000 037 | 0.000 062 |
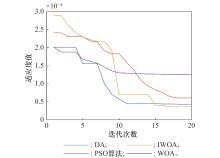
Fig.6
Adaptation value convergence curve when tracking ramp signal"
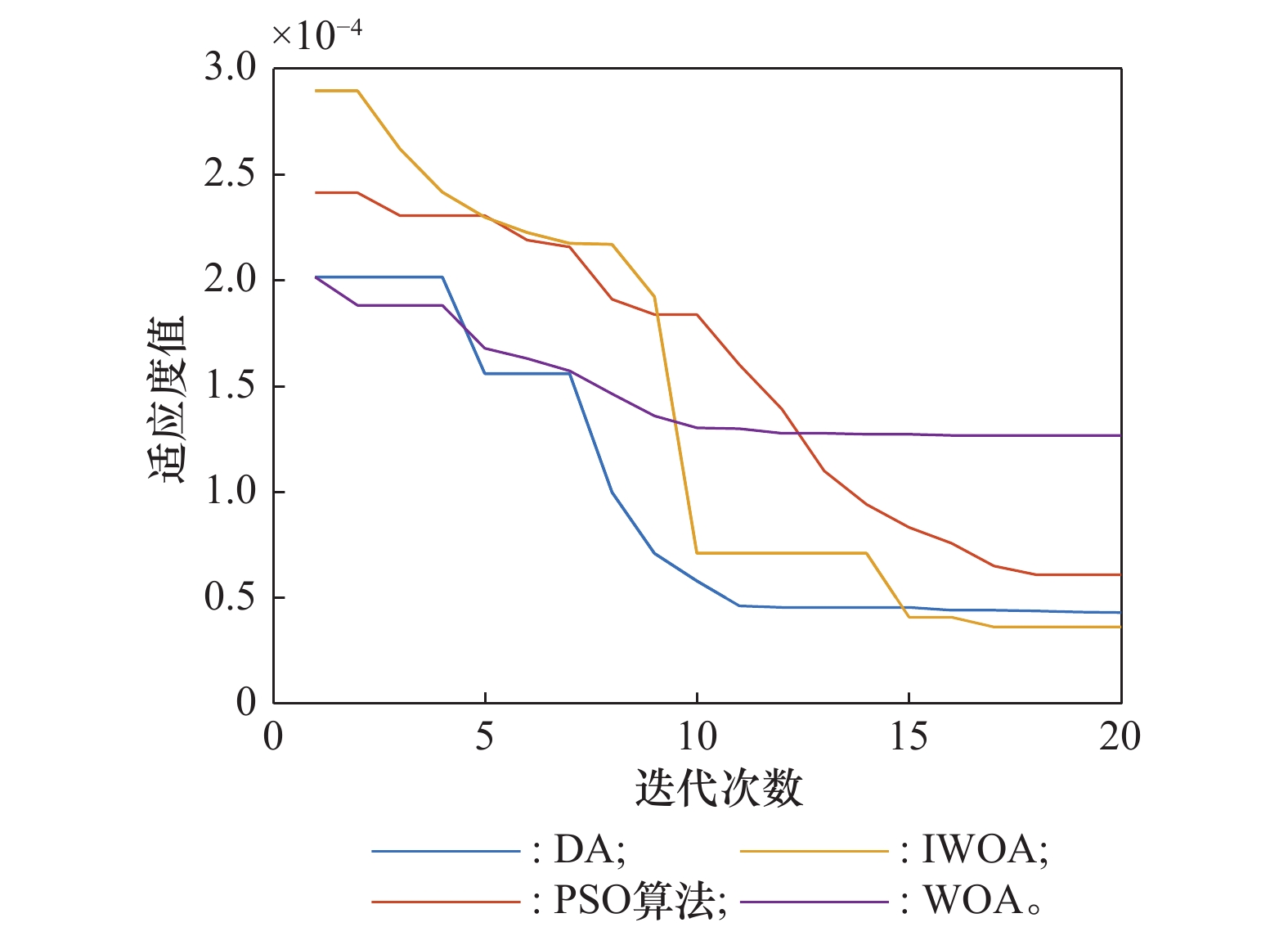

Fig.7
Comparison of position error when tracking ramp signal"
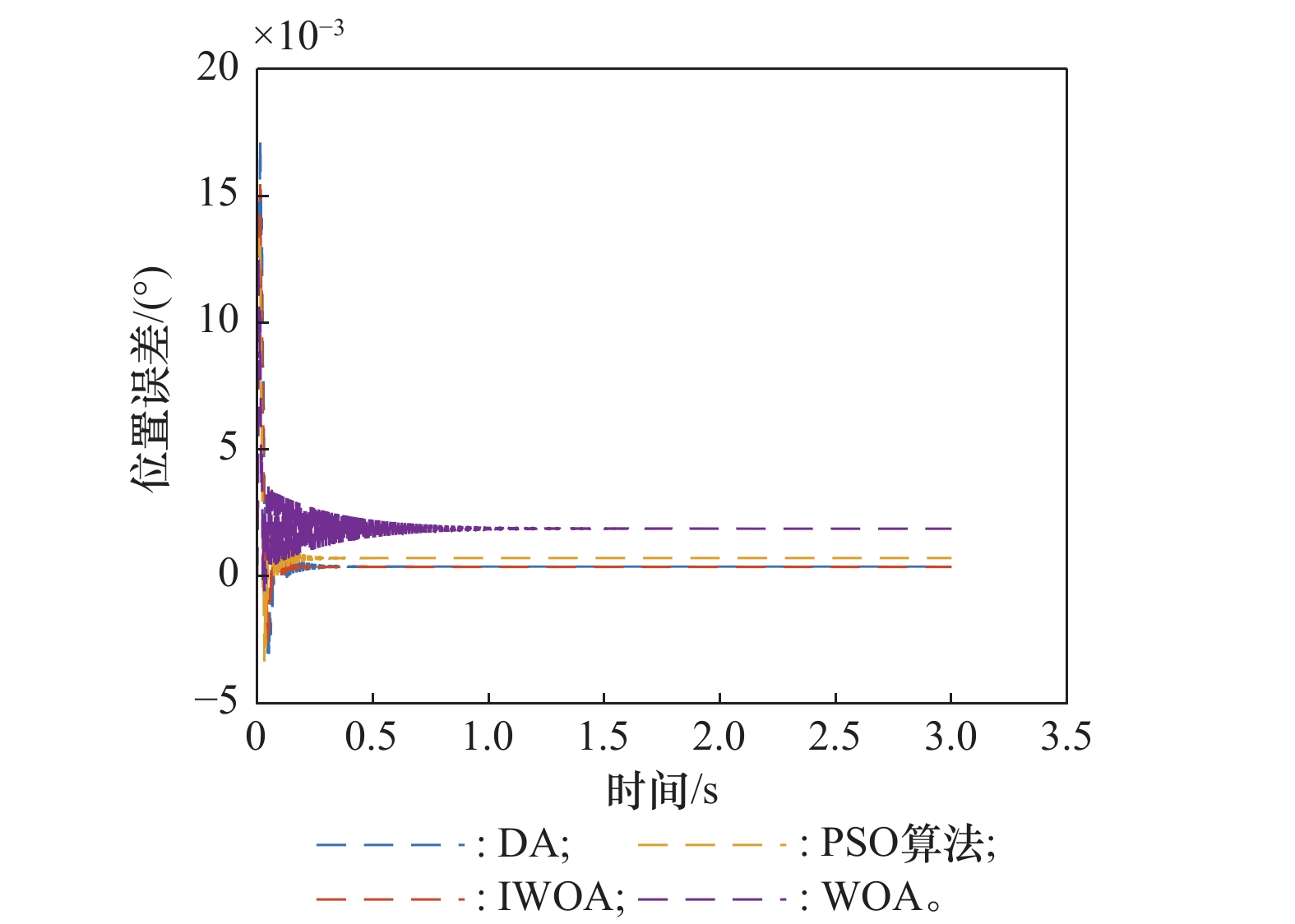
Fig.8
Fourier curve of steady-state errors when tracking ramp signal"
| 1 | STORCK H, LITTMANN W, WALLASCHEK J, et al. The effect of friction reduction in presence of ultrasonic vibrations and its relevance to travelling wave ultrasonic motors[J]. Ultrasonics, 2002, 40 (1/8): 379- 383. |
| 2 | OLOFSSON J, LINDBERG F, JOHANSSON S, et al. On the role of tribofilm formation on the alumina drive components of an ultrasonic motor[J]. Wear, 2009, 267 (5/8): 1295- 1300. |
| 3 | ZHANG Y H, FU Y H, HUA X J, et al. Wear debris of friction materials for linear standing-wave ultrasonic motors: theory and experiments[J]. Wear, 2020, 448-449: 203216. |
| 4 | LI X N, WEN Z Y, JIA B T, et al. A review of application and development trends in ultrasonic motors[J]. ES Materials & Manufacturing, 2020, 12, 3- 16. |
| 5 |
XU D M, ZHANG B J, YU S M, et al. Review on single-phase driven ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures, 2023, 34 (5): 525- 535.
doi: 10.1177/1045389X221121911 |
| 6 |
LIU Z, FU Q W, YANG P, et al. Design and performance evaluation of a miniature I-shaped linear ultrasonic motor with two vibrators[J]. Ultraso-nics, 2023, 131, 106965.
doi: 10.1016/j.ultras.2023.106965 |
| 7 |
WANG G Q, SONG J F, ZHAO G, et al. Improving output performance of ultrasonic motor by coating MoS2 on the stator[J]. Tribology International, 2023, 186, 108608.
doi: 10.1016/j.triboint.2023.108608 |
| 8 |
MUSTAFA A, SASAMURA T, MORITA T. Robust speed control of ultrasonic motors based on deep reinforcement learning of a Lyapunov function[J]. IEEE Access, 2022, 10, 46895- 46910.
doi: 10.1109/ACCESS.2022.3170995 |
| 9 |
GARRIDO R, LUNA L. Robust ultra-precision motion control of linear ultrasonic motors: a combined ADRC-Luenberger observer approach[J]. Control Engineering Practice, 2021, 111, 104812.
doi: 10.1016/j.conengprac.2021.104812 |
| 10 | MING M, LIANG W Y, FENG Z, et al. PID-type sliding mode-based adaptive motion control of a 2-DOF piezoelectric ultrasonicmotor driven stage[J]. Mechatronics, 2021, 76: 102543. |
| 11 |
SONG L, SHI J Z. Adaptive PI control of ultrasonic motor using iterative learning methods[J]. ISA Transactions, 2023, 139, 499- 509.
doi: 10.1016/j.isatra.2023.03.032 |
| 12 | KEBBAB F Z, JABRI D, BELKHIAT D E C, et al. Frequency speed control of rotary travelling wave ultrasonic motor using fuzzy controller[J]. Engineering, Technology & Applied Science Research, 2018, 8(4): 3276−3281. |
| 13 | SHI J Z, HUANG W W, ZHOU Y. T–S fuzzy control of travelling-wave ultrasonic motor[J]. Journal of Control, Automation and Electrical Systems, 2020, 31 (2): 319- 328. |
| 14 | MUSTAFA A, SASAMURA T, MORITA T. Sensorless speed control of ultrasonic motors using deep reinforcement learning[J]. IEEE Sensors Journal, 2023, 24(3): 4023−4035. |
| 15 |
JIANG Y, WANG F, SASAMURA T, et al. Dynamic characteristics and deep reinforcement learning of proportional-integral-differential controller for quadruped stator-based ultrasonic linear motor[J]. Japanese Journal of Applied Physics, 2024, 63 (4): 04SP38.
doi: 10.35848/1347-4065/ad2f18 |
| 16 |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13 (1): 19- 23.
doi: 10.3321/j.issn:1001-0920.1998.01.005 |
|
HAN J Q. Active disturbance rejection controller and its applications[J]. Control and Decision, 1998, 13 (1): 19- 23.
doi: 10.3321/j.issn:1001-0920.1998.01.005 |
|
| 17 |
HAN J Q. From PID to active disturbancerejection control[J]. IEEE Trans. On Dustrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 18 |
ZHANG D Y, YAO X L, WU Q H, et al. ADR-C based control for a class of input time delay systems[J]. Journal of Systems Engineering and Electronics, 2017, 28 (6): 1210- 1220.
doi: 10.21629/JSEE.2017.06.19 |
| 19 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proc. of the American Control Conference, 2003: 4989−4996. |
| 20 | GAO Z Q. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//Proc. of the American Control Confe-rence, 2006: 2399−2405. |
| 21 | 王鑫. 线性自抗扰控制器参数整定及其应用研究[D]. 合肥: 安徽大学, 2022. |
| WANG X. Parameter tuning and application of linear active disturbance rejection controller[D]. Hefei: Anhui University, 2022. | |
| 22 | 李广强, 董文超, 朱大庆, 等. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45 (7): 2170- 2182. |
| LI G Q, DONG W C, ZHU D Q, et al. 3D path planning for AUV based on improved whale optimization algorithm[J]. Systems Engineering and Electronics, 2023, 45 (7): 2170- 2182. | |
| 23 |
NADIMI-SHAHRAKI M, ZAMANI H, ASGHARI V Z, et al. A systematic review of the whale optimization algorithm: theoretical foundation, improvements, and hybridizations[J]. Archives of Computational Methods in Engineering, 2023, 30 (7): 4113- 4159.
doi: 10.1007/s11831-023-09928-7 |
| 24 |
AKRAAM M, RASHID T, ZAFAR S. An image encryption scheme proposed by modifying chaotic tent map using fuzzy numbers[J]. Multimedia Tools and Applications, 2023, 82 (11): 16861- 16879.
doi: 10.1007/s11042-022-13941-6 |
| 25 |
KOPETS E, VYACHESLAV R, OLEG V, et al. Fractal tent map with application to surrogate testing[J]. Fractal and Fractional, 2024, 8 (6): 344.
doi: 10.3390/fractalfract8060344 |
| 26 |
LI H Z, WANG J. Collaborative annealing power k-means++ clustering[J]. Knowledge- Based Systems, 2022, 255, 109593.
doi: 10.1016/j.knosys.2022.109593 |
| 27 | 高程, 都延丽, 步雨浓, 等. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46 (3): 972- 981. |
| GAO C, DU Y L, BU Y N, et al. Heterogeneous UAV swarm grouping deployment for complex multiple tasks[J]. Systems Engineering and Electronics, 2024, 46 (3): 972- 981. | |
| 28 | CHATTERJEE A, SIARRY P. Nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization[J]. Computers & Operations Research, 2006, 33 (3): 859- 871. |
| 29 |
YU H, GAO Y, WANG L, et al. A hybrid particle swarm optimization algorithm enhanced with nonlinear inertial weight and gaussian mutation for job shop scheduling problems[J]. Mathematics, 2020, 8, 1355.
doi: 10.3390/math8081355 |
| 30 | 冯建鑫, 王强, 王雅雷, 等. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51 (6): 1990- 1996. |
| FENG J X, WANG Q, WANG Y L, et al. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51 (6): 1990- 1996. |
| [1] | Caiyun WANG, Yifan JIA, Xiaofei LI, Jianing WANG, Yida WU. Ballistic target HRRP recognition method based on improved whale algorithm and BiGRU [J]. Systems Engineering and Electronics, 2025, 47(6): 1824-1832. |
| [2] | Bo GUO, Ming TIE, Wenhui FAN, Chuanxu LI. Cooperative guidance method of high lift-to-drag ratio aircraft based on sliding mode control [J]. Systems Engineering and Electronics, 2025, 47(2): 580-590. |
| [3] | Zhihao CAI, Shiqi XING, Xinyuan SU, Junpeng WANG, Weize MENG, Hao WANG. Multi-point source spatial arraying method based on triplet antenna [J]. Systems Engineering and Electronics, 2025, 47(11): 3574-3585. |
| [4] | Xuehao LIU, Wenxue LIU, Chaosan YANG, Wenjing ZHU, Yu SONG, Jinhai LI. Optimization method of user quantity prediction based on GPR model [J]. Systems Engineering and Electronics, 2024, 46(8): 2721-2729. |
| [5] | Caiyun WANG, Yun CHANG, Xiaofei LI, Jianing WANG, Yida WU, Huiwen ZHANG. Infrared spatial cone-shaped target recognition based on improved MKELM [J]. Systems Engineering and Electronics, 2024, 46(10): 3257-3264. |
| [6] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [7] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [8] | Chi HAN, Wei XIONG. Operational effectiveness evaluation of space reconnaissance equipment based on SVR optimized by improved grey wolf optimizer [J]. Systems Engineering and Electronics, 2021, 43(10): 2902-2910. |
| [9] | Zilong WU, Hong CHEN, Yingke LEI, Xin LI, Hao XIONG. Communication emitter individual identification based on stacked LSTM network [J]. Systems Engineering and Electronics, 2020, 42(12): 2915-2923. |
| [10] | Weiguo SHI, Ming GUO. Variable sampling period scheduling of networked control system based on whale optimization algorithm relevance vector machine [J]. Systems Engineering and Electronics, 2020, 42(10): 2348-2355. |
| [11] | HUANG Wei, XU Jiancheng, WU Huaxing, LI Junbing. Missile formation consensus control algorithm based on parameter optimization [J]. Systems Engineering and Electronics, 2018, 40(11): 2528-. |
| [12] | YANG Yingjie1, YU Yongli1, ZHANG Liu1, ZHANG Wei2. Sensitivity analysis and parameters optimization for equipment maintenance support simulation system [J]. Systems Engineering and Electronics, 2016, 38(3): 575-581. |
| [13] | WANG Jing-cheng1, CAO Hui2, ZHANG Yan-bin2, REN Zhi-wen1. Parameter optimization algorithm of SVDD based on minimizing the density outside [J]. Systems Engineering and Electronics, 2015, 37(6): 1446-1451. |
| [14] | LIU Zhong, ZHAO Yan hui. Fractional order missile controller design with optimum structure [J]. Systems Engineering and Electronics, 2014, 36(12): 2490-2495. |
| [15] | CHANG Zhi-peng,CHENG Long-sheng. Automatic optimization algorithm of multiple parameters for kernel Fisher discriminant analysis [J]. Journal of Systems Engineering and Electronics, 2013, 35(1): 212-217. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||