Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (12): 4153-4165.doi: 10.12305/j.issn.1001-506X.2025.12.27
• Guidance, Navigation and Control • Previous Articles
Integrated maneuvering penetration guidance and control design for hypersonic vehicle
Yuxin LIAO, Weiping XU, Qifeng CHEN, Zeyang YIN
- School of Automation,Central South University,Changsha 410083,China
-
Received:2024-10-28Revised:2025-04-14Online:2025-05-29Published:2025-05-29 -
Contact:Weiping XU
CLC Number:
Cite this article
Yuxin LIAO, Weiping XU, Qifeng CHEN, Zeyang YIN. Integrated maneuvering penetration guidance and control design for hypersonic vehicle[J]. Systems Engineering and Electronics, 2025, 47(12): 4153-4165.
share this article

Fig.1
Scenario of maneuvering penetration"
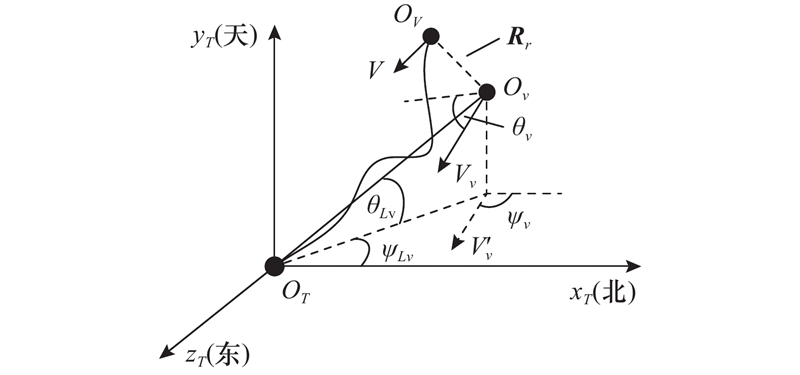

Fig.2
Illustration of conversion relationship between coordinate system"
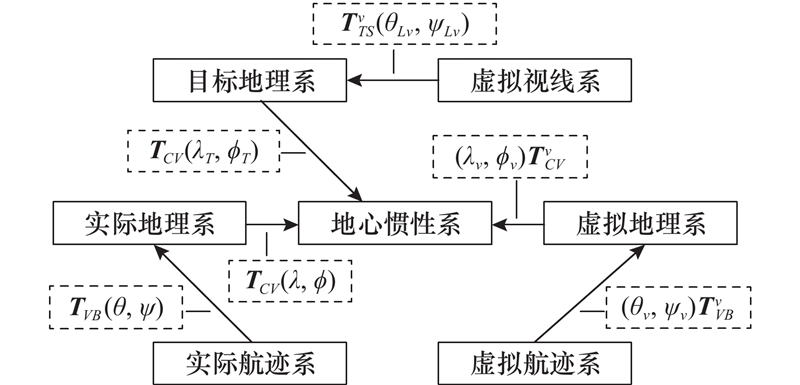

Fig.3
Flowchart of integrated maneuvering penetration guidance and control design method"
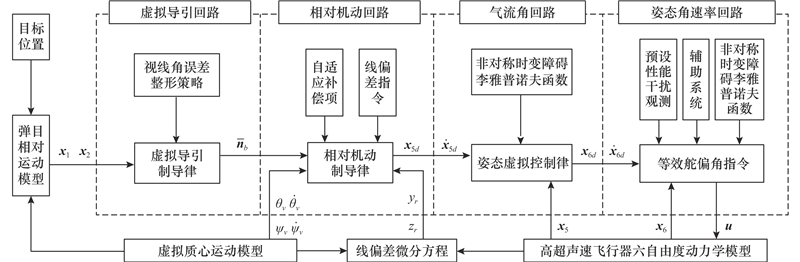
Table 1
Initial condition setting of the simulation"
| 仿真参数 | 数值 | 仿真参数 | 数值 | 仿真参数 | 数值 | 仿真参数 | 数值 | |||
| 19.5 | 0 | |||||||||
| 2 | −1 | 0 | 0 | |||||||
| 2 | 140 | −17 | 0 | |||||||
| 0 | 1.01 | 1.01 | 30 | |||||||
| 25 | −50 | — | — | — | — |
Table 2
Parameters setting of the hypersonic vehicle"
| 飞行器参数 | 数值 | 飞行器参数 | 数值 | 飞行器参数 | 数值 | 飞行器参数 | 数值 | |||
| 5.4 | 6.202 | 784.14 | ||||||||
| 448.99 | 0 | |||||||||
| 0 | 2 | 45 | 45 | |||||||
| 45 | 15 | 15 | 15 |
Table 3
Parameters setting of the proposed method"
| 回路 | 参数设置 |
| 虚拟导引回路 | |
| 相对机动回路 | |
| 姿控回路 | |
Fig.4
Three-dimensional missile trajectory and curves of line deviations"
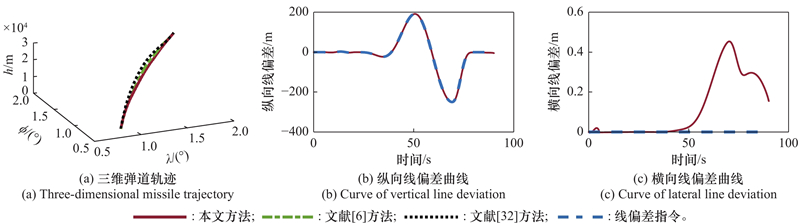

Fig.5
Curves of airflow angles of the hypersonic vehicle"
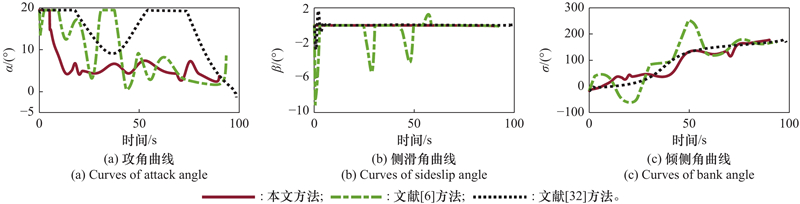

Fig.6
Curves of attitude angular rates of the hypersonic vehicle"
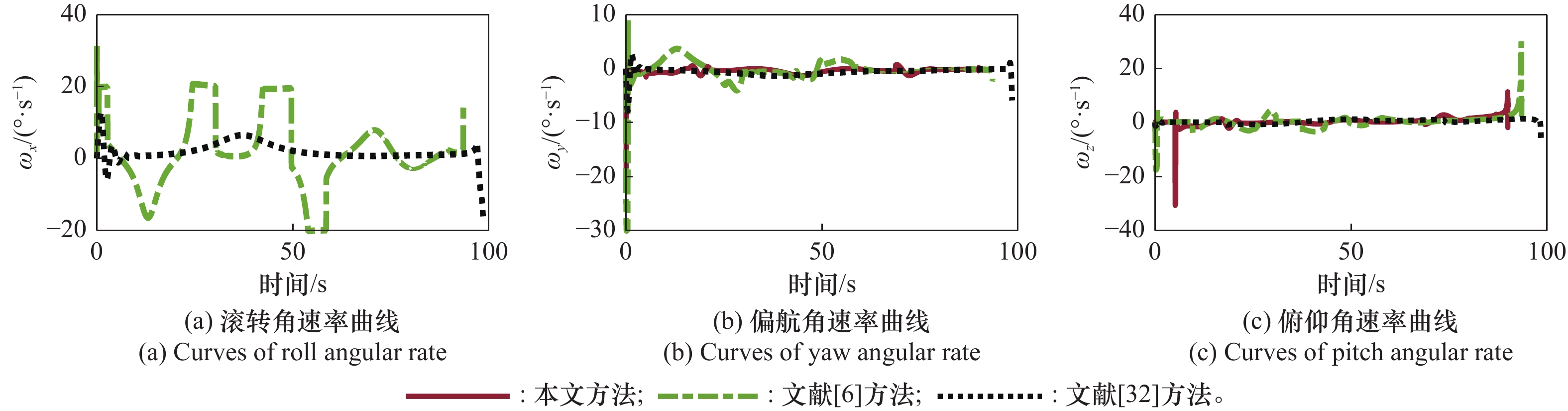

Fig.7
Curves of fin deflection angles of the hypersonic vehicle"
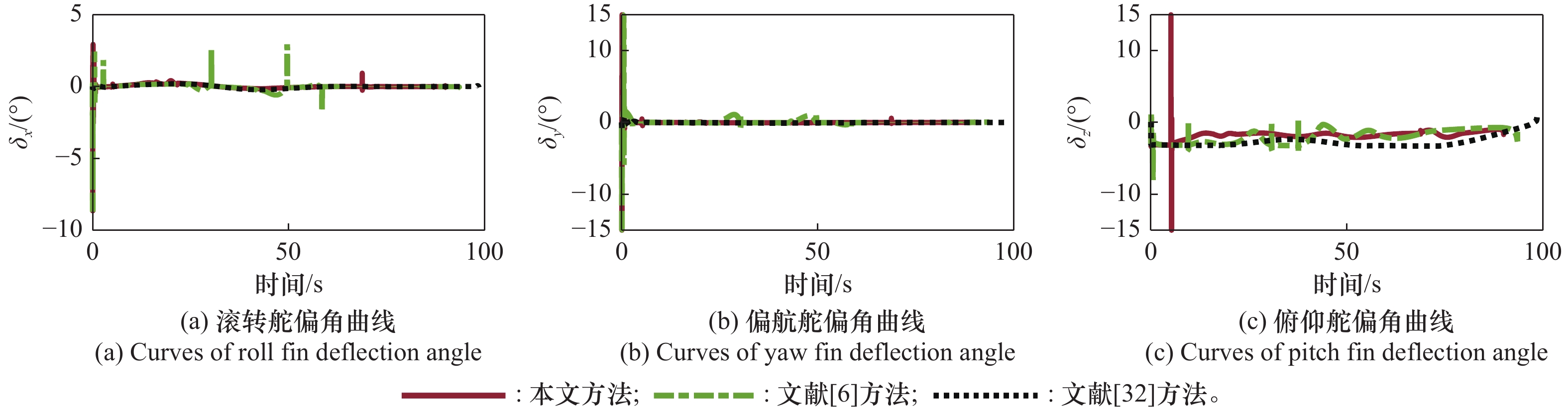
Table 4
Statistic results of typical offensive and defensive scenarios simulation"
| 方法 | |||||
| 本文方法 | − | ||||
| 文献[ | |||||
| 文献[ | − | − |
Fig.8
Distribution of terminal settling velocity and angles"

Fig.9
Distribution of terminal miss distance"
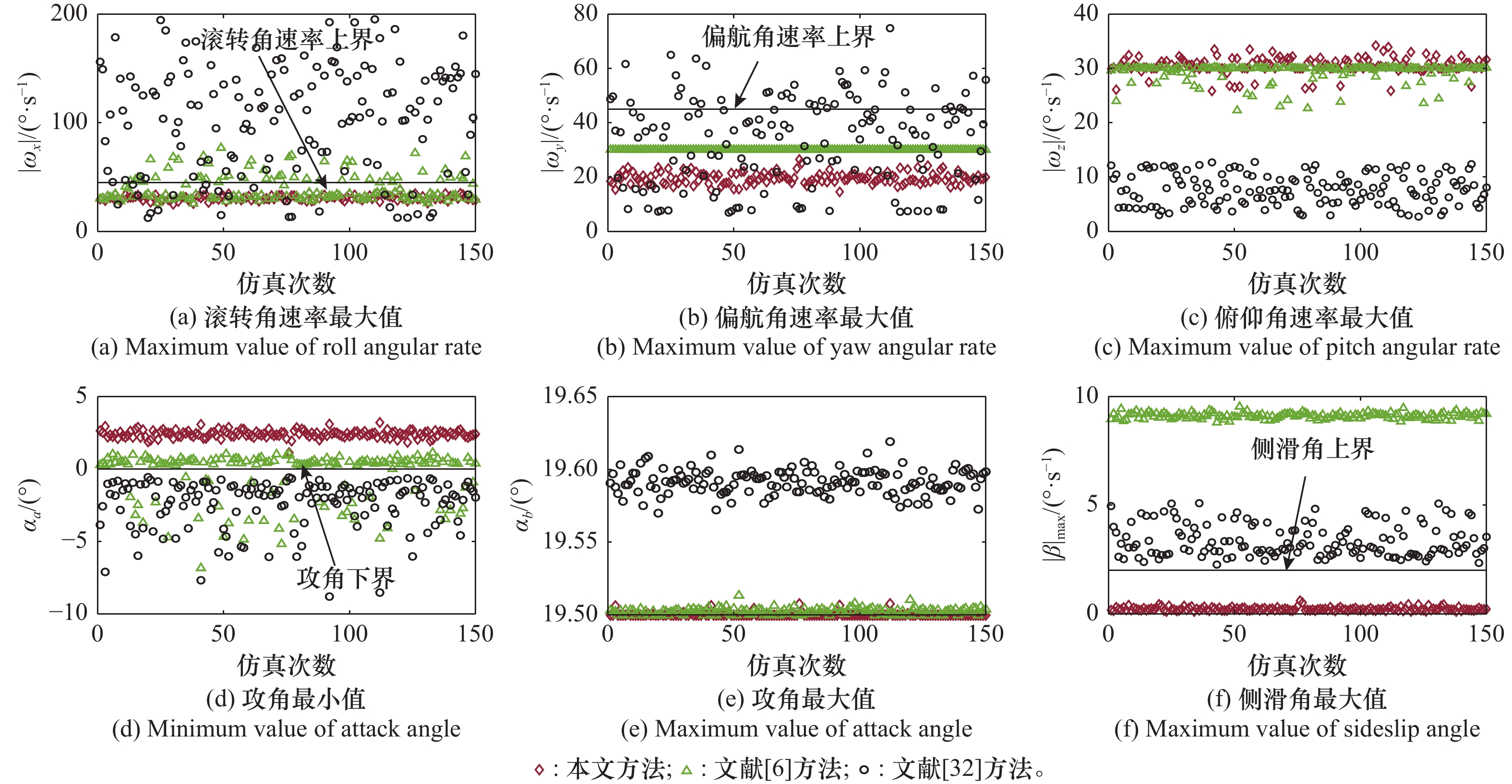
Fig.10
Distribution of maximum and minimum value of flight states"
| 1 |
安通, 王鹏, 王建华, 等. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
AN T, WANG P, WANG J H, et al. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles[J]. Systems Engineering and Electronics, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
| 2 | HE L, YAN X D. Adaptive terminal guidance law for spiral diving maneuver based on virtual sliding targets[J]. Journal of Guidance, Control, and Dynamics, 2018, 41 (7): 1589- 1599. |
| 3 |
黄鲁豫, 曲鑫, 凡永华, 等. 多约束下的导弹螺旋机动制导控制一体化设计[J]. 宇航学报, 2021, 42 (9): 1108- 1118.
doi: 10.3873/j.issn.1000-1328.2021.09.006 |
|
HUANG L Y, QU X, FAN Y H, et al. Integrated guidance and control design for spiral maneuvering missile with multiple constraints[J]. Journal of Astronautics, 2021, 42 (9): 1108- 1118.
doi: 10.3873/j.issn.1000-1328.2021.09.006 |
|
| 4 |
CHEN J Q, SUN R S, LU Y, et al. Adaptive cooperative game penetration guidance for multiple hypersonic vehicles with performance constraints[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (4): 5538- 5555.
doi: 10.1109/TAES.2024.3392874 |
| 5 | 乔毅涛, 耿飞龙, 张新, 等. 基于最优控制的高超螺旋俯冲轨迹设计[J]. 飞控与探测, 2021, 4 (4): 49- 58. |
| QIAO Y T, GENG F L, ZHANG X, et al. Supersonic vehicle spiral dive trajectory design based on optimal control[J]. Flight Control & Detection, 2021, 4 (4): 49- 58. | |
| 6 |
YU X J, LUO S B, LIU H Q. Integrated design of multi-constrained snake maneuver surge guidance control for hypersonic vehicles in the dive segment[J]. Aerospace, 2023, 10 (9): 765.
doi: 10.3390/aerospace10090765 |
| 7 |
ZHAO S B, ZHU J W, BAO W M, et al. High-dynamic intelligent maneuvering guidance strategy via deep reinforcement learning[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237 (11): 2617- 2631.
doi: 10.1177/09544100231155695 |
| 8 |
ZHAO B, LIU T Z, XIANG T Y, et al. Cooperative guidance for maneuvering penetration with attack time consensus and bounded input[J]. International Journal of Aeronautical and Space Sciences, 2024, 25 (4): 1395- 1411.
doi: 10.1007/s42405-024-00727-3 |
| 9 |
赵斌, 刘天泽. 线偏差控制的螺旋机动突防与导引一体化设计[J]. 宇航学报, 2022, 43 (10): 1333- 1344.
doi: 10.3873/j.issn.1000-1328.2022.10.006 |
|
ZHAO B, LIU T Z. Integrated design of maneuvering penetration and guidance based on line deviation control[J]. Journal of Astronautics, 2022, 43 (10): 1333- 1344.
doi: 10.3873/j.issn.1000-1328.2022.10.006 |
|
| 10 | 卫长竖, 赵斌, 赵瑞, 等. 线偏差控制的协同机动突防、导引与控制一体化[J]. 宇航学报, 2024, 45 (6): 924- 934. |
| WEI C S, ZHAO B, ZHAO R, et al. Line deviation control of cooperative maneuvering penetration, guidance and control integration[J]. Journal of Astronautics, 2024, 45 (6): 924- 934. | |
| 11 |
LI G J, LIU L, LIU J G, et al. Three-dimensional low-order fixed-time integrated guidance and control for STT missile with strap-down seeker[J]. Journal of The Franklin Institute-Engineering and Applied Mathematics, 2023, 360 (13): 9788- 9811.
doi: 10.1016/j.jfranklin.2023.07.028 |
| 12 |
CHAO T, QUAN S M, MA P, et al. Three-dimensional low-order finite-time integrated guidance and control design with side-window constraint[J]. Aerospace Science and Technology, 2022, 121, 107355.
doi: 10.1016/j.ast.2022.107355 |
| 13 |
LIANG L C, ZHAO B, ZHOU J, et al. Impact angle controlled integrated guidance and control with input and state constraints[J]. International Journal of Control, 2024, 97 (4): 796- 810.
doi: 10.1080/00207179.2023.2175408 |
| 14 |
LI J F, SONG S M, SHI X P. Full state-constrained integrated guidance and control for aerial interceptors with tunnel prescribed performance using integral barrier Lyapunov function[J]. International Journal of Robust and Nonlinear Control, 2024, 34 (12): 8090- 8126.
doi: 10.1002/rnc.7384 |
| 15 |
LI G J, WU Y M, LIU J G, et al. Nonlinear transformed function-based adaptive finite-time integrated guidance and control design with full state constraints[J]. Aerospace Science and Technology, 2023, 143, 108723.
doi: 10.1016/j.ast.2023.108723 |
| 16 |
LI Z B, DONG Q L, ZHANG X Y, et al. Impact angle-constrained integrated guidance and control for supersonic skid-to-turn missiles using backstepping with global fast terminal sliding mode control[J]. Aerospace Science and Technology, 2022, 122, 107386.
doi: 10.1016/j.ast.2022.107386 |
| 17 |
CUI L, ZHEN Z, ZHANG K, et al. Prescribed-time integrated guidance and control for bank to turn reentry vehicle[J]. Aerospace Science and Technology, 2024, 150, 109218.
doi: 10.1016/j.ast.2024.109218 |
| 18 |
WANG Z, HAO Y T. Reinforcement learning adaptive risk-sensitive fault-tolerant IGC method for a class of STT missile[J]. Nonlinear Dynamics, 2024, 112 (20): 18195- 18218.
doi: 10.1007/s11071-024-09776-5 |
| 19 |
XU W P, LIAO Y X, WANG X, et al. Range-varying sliding mode-based integrated guidance and control for hypersonic vehicle with multi-constraints[J]. International Journal of Robust and Nonlinear Control, 2025, 35 (6): 2383- 2398.
doi: 10.1002/rnc.7804 |
| 20 |
XU W P, LIAO Y X, SU J X, et al. Error shaping strategy-based multi-constrained integrated guidance and control for hypersonic vehicle in dive phase[J]. Nonlinear Dynamics, 2025, 113, 14997- 15017.
doi: 10.1007/s11071-025-10900-2 |
| 21 |
LUO Y X, SONG J, ZHAO M F, et al. Integrated guidance and control for a hypersonic vehicle with disturbance and measurement noise suppression[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (5): 7172- 7184.
doi: 10.1109/TAES.2024.3412070 |
| 22 |
HU C F, TANG Y F, MI H P, et al. Tube-based composite fault-tolerant control method for flexible hypersonic vehicle[J]. International Journal of Aeronautical and Space Sciences, 2025, 26 (1): 196- 219.
doi: 10.1007/s42405-024-00776-8 |
| 23 |
LIANG X H, WANG Q, HU C H, et al. Fixed-time observer based fault tolerant attitude control for reusable launch vehicle with actuator faults[J]. Aerospace Science and Technology, 2020, 107, 106314.
doi: 10.1016/j.ast.2020.106314 |
| 24 | 王忠森, 廖宇新, 魏才盛, 等. 高超声速飞行器快速终端滑模保性能容错控制[J]. 航空学报, 2023, 44 (24): 328476. |
| WANG Z S, LIAO Y X, WEI C S, et al. Fast terminal sliding mode fault-tolerant control of hypersonic vehicle with guaranteed performance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (24): 328476. | |
| 25 |
WANG J, ZHANG C, ZHENG C M, et al. Adaptive neural network fault-tolerant control of hypersonic vehicle with immeasurable state and multiple actuator faults[J]. Aerospace Science and Technology, 2024, 152, 109378.
doi: 10.1016/j.ast.2024.109378 |
| 26 |
XU S H, WEI C Z, ZHANG L T, et al. Neural network based adaptive nonsingular practical predefined-time fault-tolerant control for hypersonic morphing aircraft[J]. Chinese Journal of Aeronautics, 2024, 37 (4): 421- 435.
doi: 10.1016/j.cja.2023.12.020 |
| 27 | 王建华. 高超声速飞行器制导控制一体化设计方法研究[D]. 长沙: 国防科学技术大学, 2017. |
| WANG J H. Study on integrated guidance and control design approach for hypersonic vehicles[D]. Changsha: National University of Defense Technology, 2017. | |
| 28 |
WANG X Y, FANG H, DOU L H, et al. Integrated 3-D flight trajectory tracking control with aerodynamic constraints on attitude and control surfaces[J]. Asian Journal of Control, 2018, 20 (5): 1891- 1906.
doi: 10.1002/asjc.1696 |
| 29 | LIAO Y X, LI H F, BAO W M. Three-dimensional diving guidance for hypersonic gliding vehicle via integrated design of FTNDO and AMSTSMC[J]. IEEE Trans. on Industrial Electronics, 2017, 65 (3): 2704- 2715. |
| 30 |
BU X W, WU X Y, HUANG J Q, et al. A guaranteed transient performance-based adaptive neural control scheme with low-complexity computation for flexible air-breathing hypersonic vehicles[J]. Nonlinear Dynamics, 2016, 84, 2175- 2194.
doi: 10.1007/s11071-016-2637-0 |
| 31 |
ZHANG D H, MA P, WANG S Y, et al. Multi-constraints adaptive finite-time integrated guidance and control design[J]. Aerospace Science and Technology, 2020, 107, 106334.
doi: 10.1016/j.ast.2020.106334 |
| 32 | 刘达, 赵暾, 张占月. 高超声速飞行器三通道耦合制导律与鲁棒控制律设计[J]. 战术导弹技术, 2023 (5): 97- 103,123. |
| LIU D, ZHAO T, ZHANG Z Y. A design of three-channel coupling guidance and robust control system for hypersonic vehicle[J]. Tactical Missile Technology, 2023 (5): 97- 103,123. |
| [1] | Xun HUANG, Boyi CHEN, Shouyong PENG, Yanbin LIU, Ben YANG, Haoran PANG. Trajectory optimization strategy for hypersonic vehicle under control constraints [J]. Systems Engineering and Electronics, 2025, 47(5): 1646-1654. |
| [2] | Shaowei HUANG, Yanli DU, Yanbin LIU, Yueping WANG, Wu LIU. Adaptive sliding cooperative terminal guidance with finite-time convergence [J]. Systems Engineering and Electronics, 2025, 47(3): 961-969. |
| [3] | Jinzhao ZHU, Di ZHOU, Xiaobo CHEN, Mingchun CAI. Fast time-varying maneuver model and trajectory prediction of near space hypersonic vehicle [J]. Systems Engineering and Electronics, 2025, 47(1): 244-253. |
| [4] | Yuyu ZHAO, Chao SUO, Yuxiao WANG. Differential flatness-based tracking control method for hypersonic vehicle [J]. Systems Engineering and Electronics, 2024, 46(3): 1084-1092. |
| [5] | Lecheng LIANG, Bin ZHAO, Jun ZHOU, Wanli ZHAO. Integrated guidance and control method against aerial target with partial constraints [J]. Systems Engineering and Electronics, 2023, 45(4): 1134-1143. |
| [6] | Qian PENG, Jianguo GUO, Zongyi GUO, Guoqing WANG. Multi-constraint multi-input interceptor integrated attitude and trajectory compound control [J]. Systems Engineering and Electronics, 2023, 45(3): 806-813. |
| [7] | Junlong LI, Songzhou LI, Di ZHOU. Optimization method for three-impulse rendezvous under multi-constraints [J]. Systems Engineering and Electronics, 2022, 44(8): 2612-2620. |
| [8] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [9] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [10] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [11] | Shang JIANG, Bo WEI, Weige LIANG, Dongyan SUN, Jinjun LI, Ye MA. Integrated guidance and control design method with multiple constraints and backlash [J]. Systems Engineering and Electronics, 2022, 44(4): 1318-1328. |
| [12] | Tong AN, Peng WANG, Jianhua WANG, Guojian TANG, Yulong PAN, Haishan CHEN. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles [J]. Systems Engineering and Electronics, 2022, 44(3): 956-966. |
| [13] | Junbiao ZHANG, Jiajun XIONG, Xuhui LAN, Fan LI, Wenjian LIU, Qiushi XI. 3D tracking algorithm of hypersonic gliding target based on adaptive filtering [J]. Systems Engineering and Electronics, 2022, 44(2): 628-636. |
| [14] | Caihong YUE, Shengjing TANG, Jie GUO, Xiao WANG, Haoqiang ZHANG. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle [J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243. |
| [15] | Jianguo GUO, Yalu SU. Control system design of adaptive dynamic programming for hypersonic vehicle [J]. Systems Engineering and Electronics, 2021, 43(6): 1628-1635. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||