Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (12): 4130-4142.doi: 10.12305/j.issn.1001-506X.2025.12.25
• Guidance, Navigation and Control • Previous Articles
Reinforcement learning based disturbance rejection compensation control method for morphing aircraft
Yang LIU, Fanyi MENG, Gang CHEN
- School of Aerospace Engineering,Xi’an Jiaotong University,Xi’an 710049,China
-
Received:2024-12-09Revised:2025-04-06Online:2025-05-29Published:2025-05-29 -
Contact:Gang CHEN
CLC Number:
Cite this article
Yang LIU, Fanyi MENG, Gang CHEN. Reinforcement learning based disturbance rejection compensation control method for morphing aircraft[J]. Systems Engineering and Electronics, 2025, 47(12): 4130-4142.
share this article
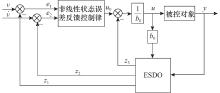
Fig.1
Basic disturbance rejection controller diagram"
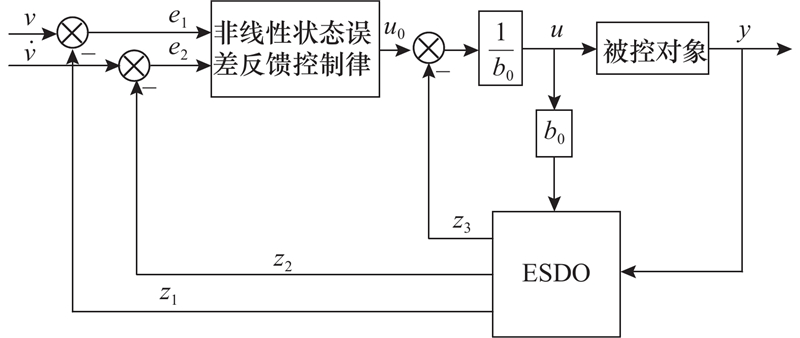

Fig.2
Schematic diagram of disturbance rejection compensation control principle based on TD3"
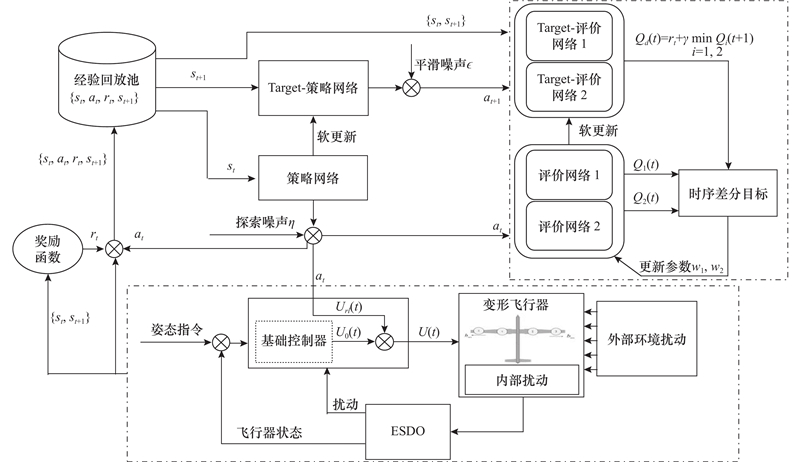

Fig.3
Schematic diagram of morphing aircraft"
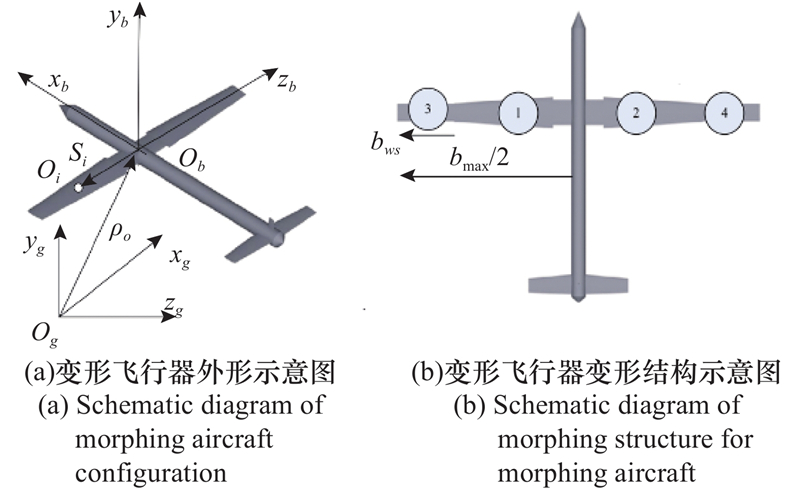

Fig.4
Variation of moment coefficient with different wingspans"
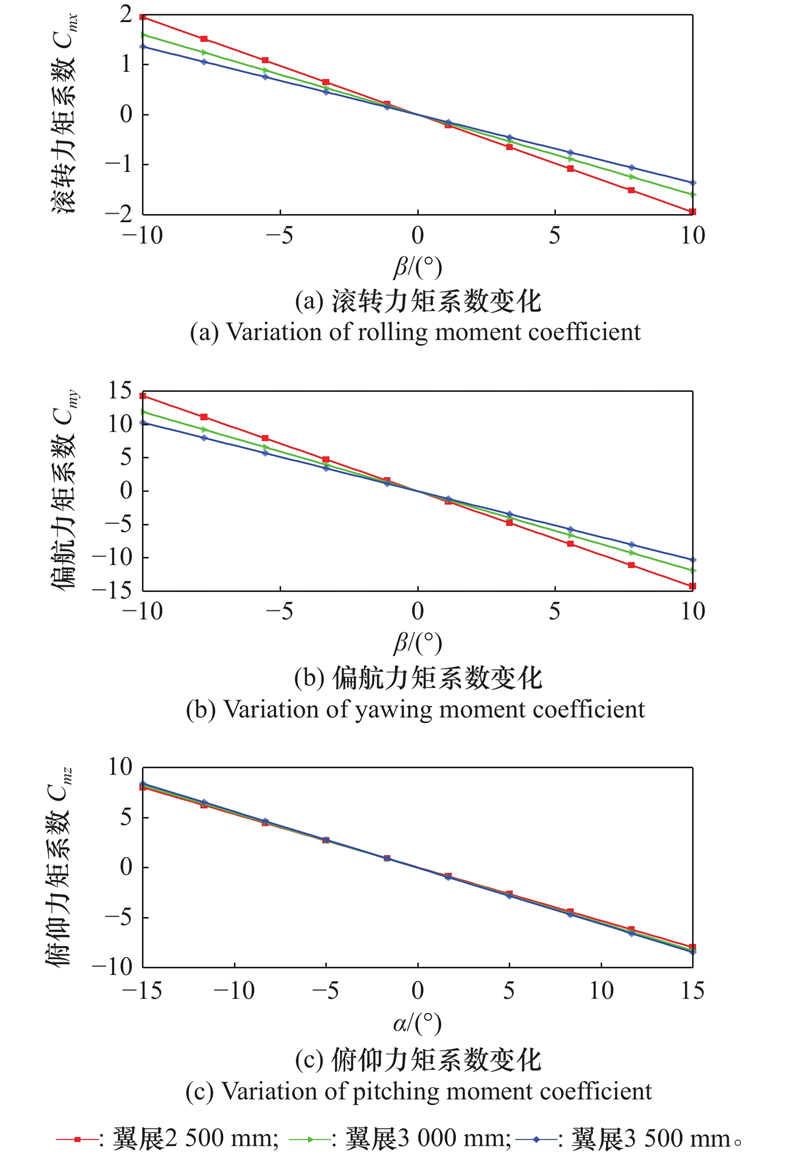

Fig.5
Attitude angle command"
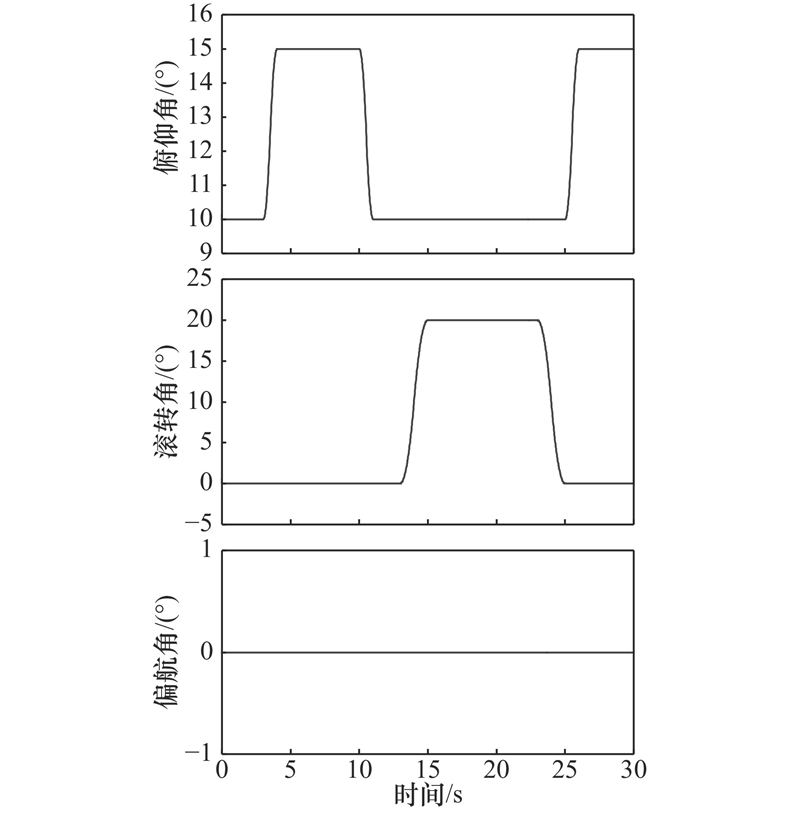
Fig.6
Morphing command"
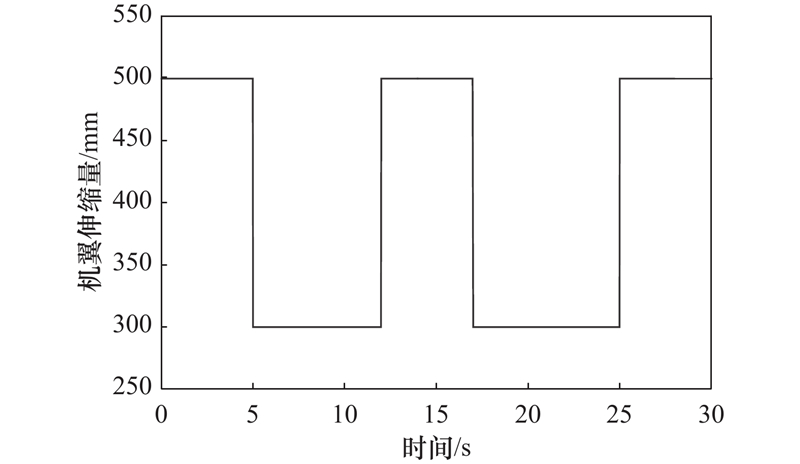
Table 1
Disturbance parameters and pull-off range"
| 扰动参数 | 拉偏范围 |
| 大气密度 | ±10% |
| 风向角 | 45°, 135°, 225°, 315° |
| 质心位置 | ±3% |
| 绕机体系各轴的转动惯量 | ±10% |
| 机体系各平面的惯性积 | ±20% |
| 滚转力矩系数 | ±20% |
| 偏航力矩系数 | ±20% |
| 俯仰力矩系数 | ±20% |
| 气动舵伺服稳态增益 | ±5% |
| 气动舵伺服时间常数 | ±12.5% |
| 气动舵伺服自然频率1 | ±8 rad/s |
| 气动舵伺服阻尼比1 | ±2% |
| 气动舵伺服自然频率2 | ±10 rad/s |
| 气动舵伺服阻尼比2 | ±15% |
Table 2
Algorithm training hyperparameters"
| 训练超参数 | 数值 | 训练超参数 | 数值 | |
| 训练回合数 | 500 | 策略网络延迟更新步数 | 4 | |
| 单回合最大步长 | 软更新速率 | 0.001 | ||
| 评价网络学习率 | 0.003 | 探索噪声标准差 | 0.5 | |
| 策略网络学习率 | 噪声衰减率 | |||
| 折扣因子 | 0.99 | 平滑噪声标准差 | 0.2 | |
| 经验池大小 | 批次样本大小 | 128 |
Table 3
Reward function weights"
| 权重参数 | 数值 |
| −1, −2, −3 | |
| −10, −10, 5, 2, 10 | |
| 1.5°, 5°, 0.05°, 0.05°, 0.05° | |
| −0.1, −0.1, −0.2 | |
| 0, −0.5, 0 |
Fig.7
Reward curve"
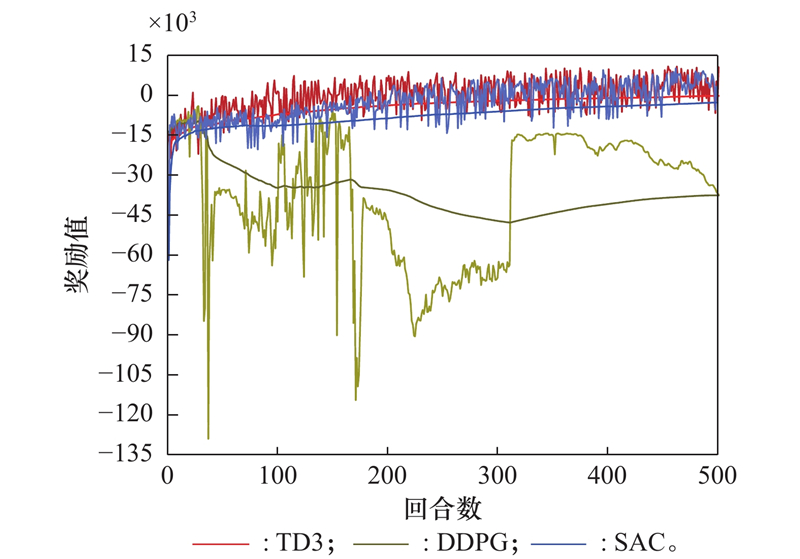
Table 4
Basic controller parameters"
| 参数项 | 取值 |
| 100, 300, 500 | |
| 100, 300, 500 | |
| 100, 300, 500 | |
| 1, 1, 1 | |
| 0.1, 0.1, 0.1 |

Fig.8
Comparison of attitude angle tracking performance of each channel without disturbance"
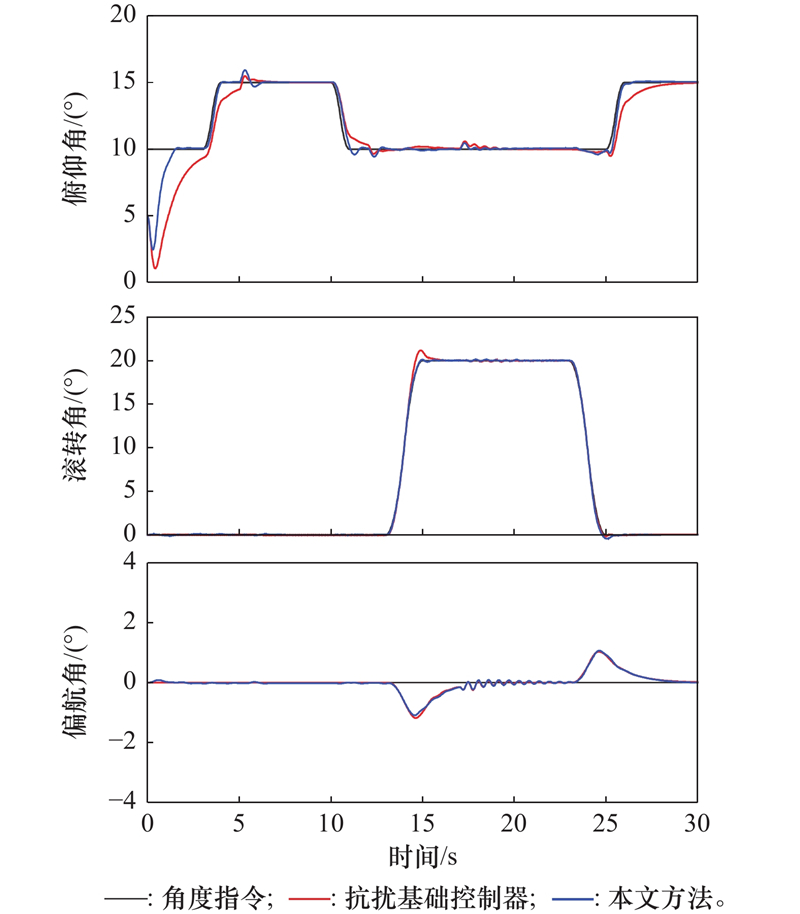
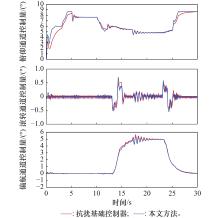
Fig.9
Comparison of control output of each channel without disturbance"
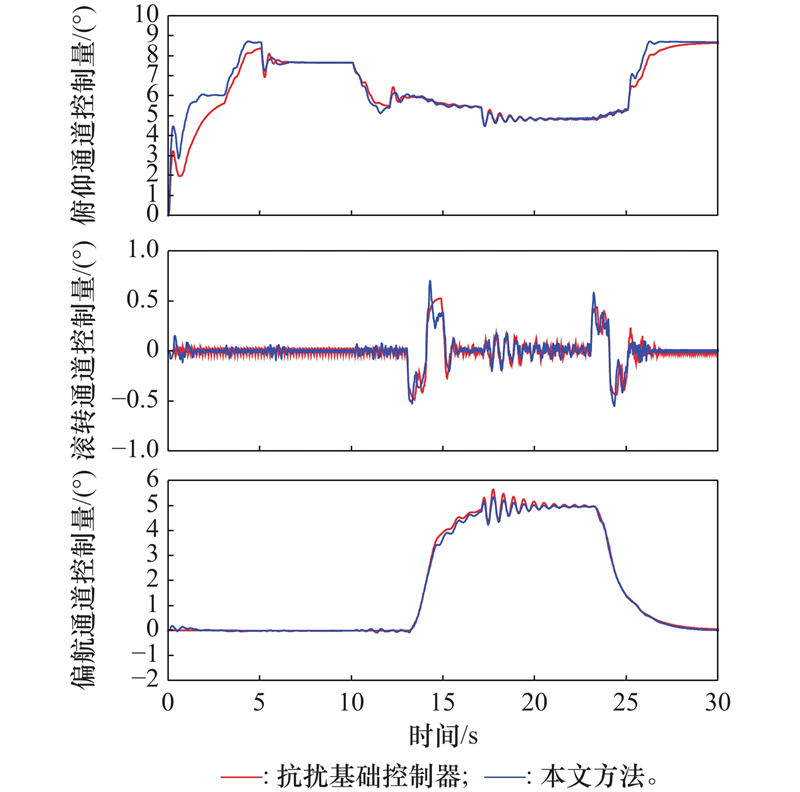
Table 5
Optimised basic controller parameters"
| 参数项 | 取值 |
| 100,500, | |
| 100,800, | |
| 100, | |
| 8,1,1 | |
| 0.1,0.2,0.3 |
Fig.10
Comparison of attitude angle tracking performance of each method after adding disturbance"
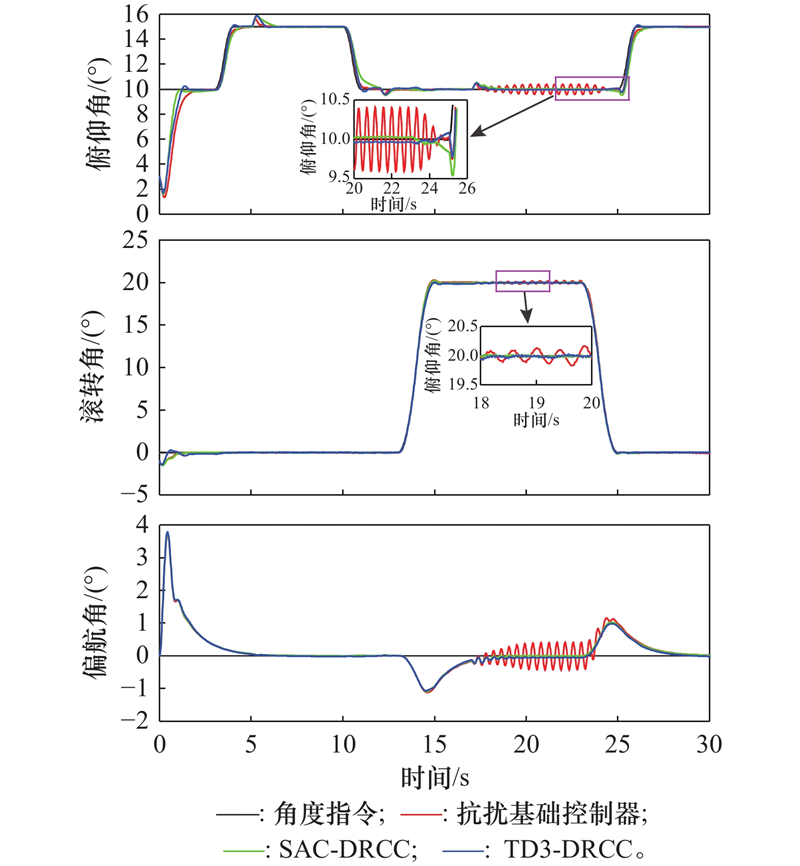
Fig.11
Comparison of control output of each method after adding disturbance"
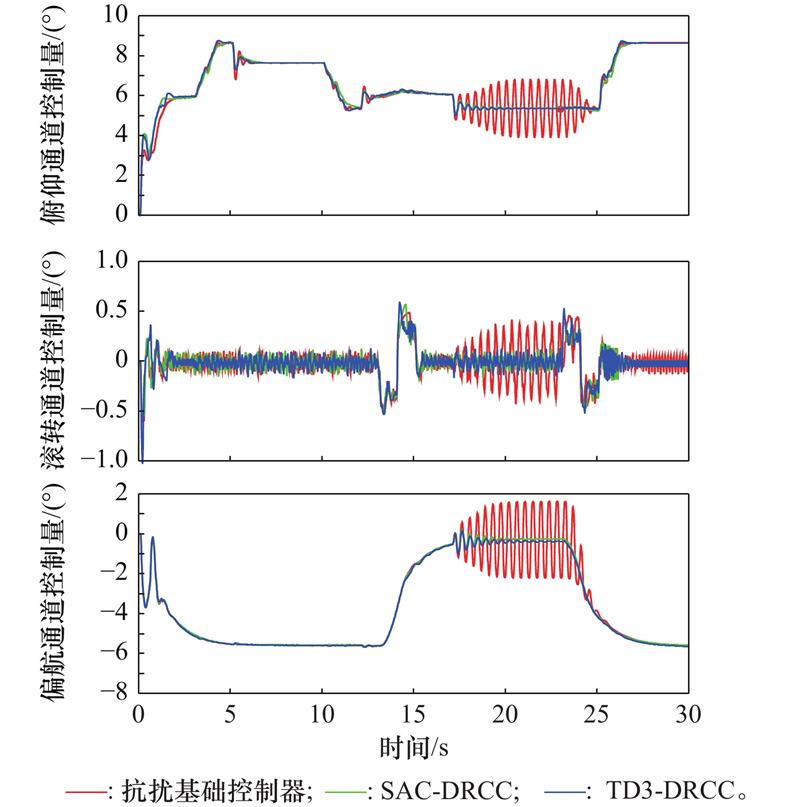

Fig.12
A new morphing command"
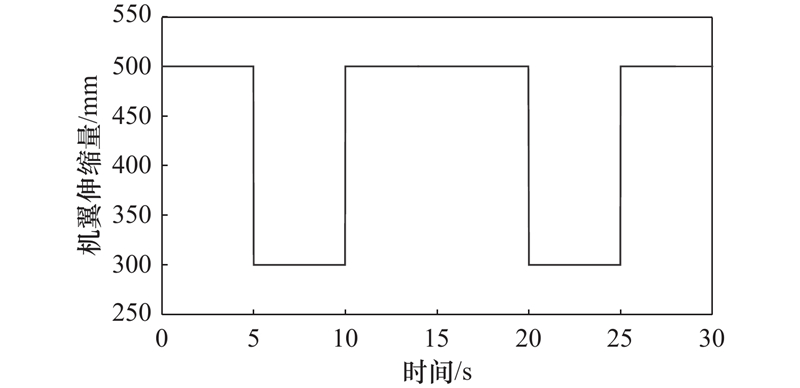
Table 6
Disturbance condition 1"
| 参数 | TD3-DRCC | SAC-DRCC | 抗扰基础控制器 | |
Table 7
Disturbance condition 2"
| 参数 | TD3-DRCC | SAC-DRCC | 抗扰基础控制器 | |
Fig.13
Comparison of attitude angle tracking performance of each method under large disturbance condition 1"
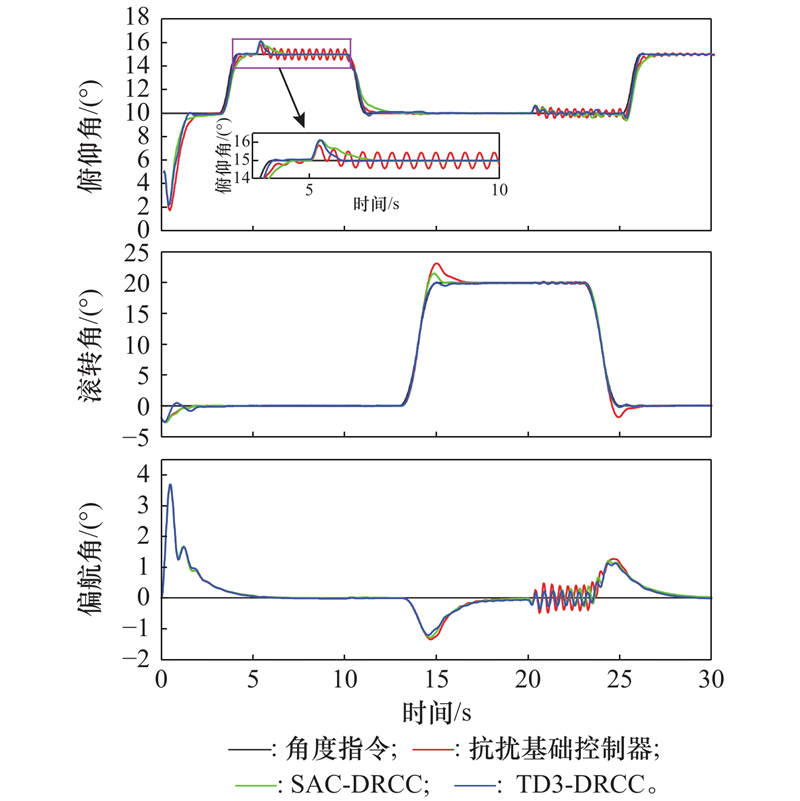
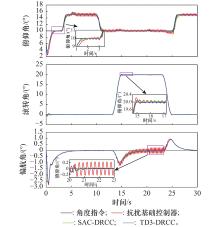
Fig.14
Comparison of attitude angle tracking performance of each method under large disturbance condition 2"
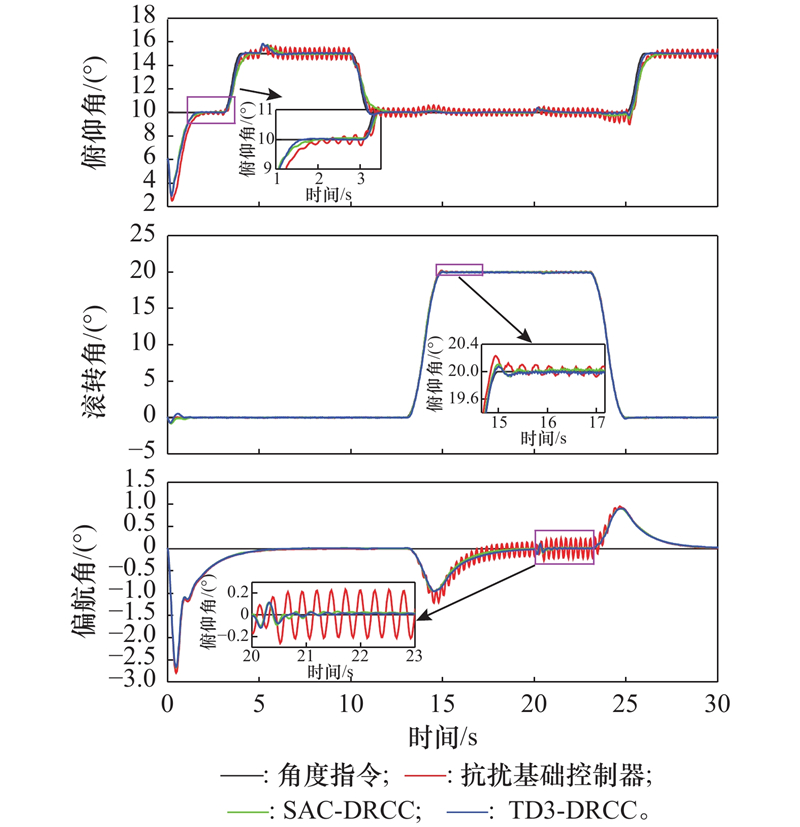
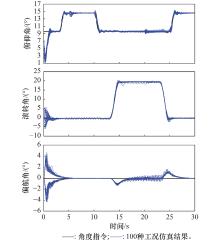
Fig.15
Simulation results of 100 random complex conditions"
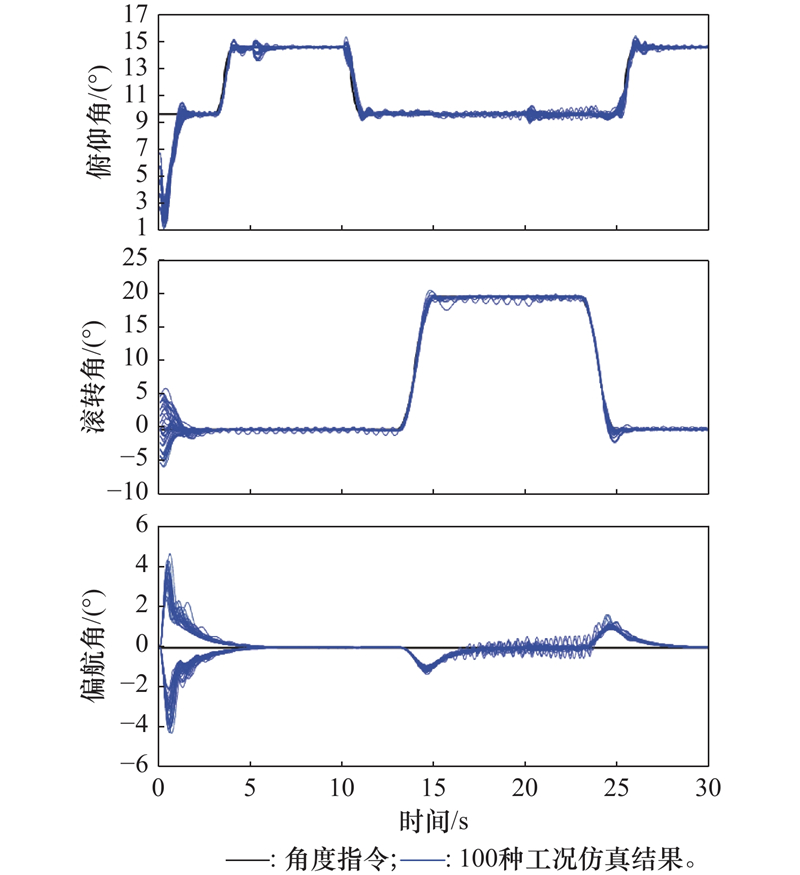
Table 8
Average performance indicators"
| 参数 | TD3-DRCC | |
| 1 |
WEISSHAAR T A. Morphing aircraft systems: historical perspectives and future challenges[J]. Journal of Aircraft, 2013, 50 (2): 337- 353.
doi: 10.2514/1.C031456 |
| 2 |
AFONSO F, VALE J, LAU F, et al. Performance based multidisciplinary design optimization of morphing aircraft[J]. Aerospace Science and Technology, 2017, 67, 1- 12.
doi: 10.1016/j.ast.2017.03.029 |
| 3 |
AJAJ R M, FRISWELL M I, BOURCHAK M, et al. Span morphing using the GNATSpar wing[J]. Aerospace Science and Technology, 2016, 53, 38- 46.
doi: 10.1016/j.ast.2016.03.009 |
| 4 | 周雨欣, 王鹏, 汤国建, 等. 基于干扰观测器的变形飞行器预设性能控制[J]. 战术导弹技术, 2024 (4): 72- 82. |
| ZHOU Y X, WANG P, TANG G J, et al. Disturbance observer-based prescribed performance control for morphing aircraft[J]. Tactical Missile Technology, 2024 (4): 72- 82. | |
| 5 |
WU Q, LIU Z H, LIU F N, et al. LPV-based self-adaption integral sliding mode controller with L2 gain performance for a morphing aircraft[J]. IEEE Access, 2019, 7, 81515- 81531.
doi: 10.1109/ACCESS.2019.2923313 |
| 6 |
YUE T, ZHANG X Y, WANG L X, et al. Flight dynamic modeling and control for a telescopic wing morphing aircraft via asymmetric wing morphing[J]. Aerospace Science and Technology, 2017, 70, 328- 338.
doi: 10.1016/j.ast.2017.08.013 |
| 7 |
李珂澄, 刘小雄, 李煜, 等. 基于自抗扰控制的变体飞机机动控制研究[J]. 西北工业大学学报, 2024, 42 (4): 662- 672.
doi: 10.1051/jnwpu/20244240662 |
|
LI K C, LIU X X, LI Y, et al. Research on morphing aircraft maneuver control based on active disturbance rejection control[J]. Journal of Northwestern Polytechnical University, 2024, 42 (4): 662- 672.
doi: 10.1051/jnwpu/20244240662 |
|
| 8 | 孟志鹏, 杨柳庆, 王波, 等. 基于改进平衡优化算法的折叠翼飞行器自抗扰控制器设计[J]. 北京航空航天大学学报, 2024, 50 (8): 2449- 2460. |
| MENG Z P, YANG L Q, WANG B, et al. ADRC design for folding wing vehicles based on improved equilibrium optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50 (8): 2449- 2460. | |
| 9 | 宋慧心, 金磊. 折叠翼飞行器的动力学建模与稳定控制[J]. 力学学报, 2020, 52 (6): 1548- 1559. |
| SONG H X, JIN L. Dynamic modeling and stability control of folding wing aircraft[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52 (6): 1548- 1559. | |
| 10 |
MENG F Y, WANG T J, CHEN G. Prescribed performance-based active anti-disturbance backstepping control for morphing aircraft[J]. Aerospace Science and Technology, 2024, 152, 109386.
doi: 10.1016/j.ast.2024.109386 |
| 11 |
PU J L, ZHANG Y H, GUAN Y Z, et al. Recurrent neural network-based predefined time control for morphing aircraft with asymmetric time-varying constraints[J]. Applied Mathematical Modelling, 2024, 135, 578- 600.
doi: 10.1016/j.apm.2024.06.024 |
| 12 | 浦甲伦, 詹韬, 李博皓, 等. 助推-滑翔飞行器再入过程强化学习自抗扰控制[J]. 战术导弹技术, 2024 (2): 117- 125. |
| PU J L, ZHAN T, LI B H, et al. Reinforcement learning-based active disturbance rejection control for boost-glide vehicle in re-entry phase[J]. Tactical Missile Technology, 2024 (2): 117- 125. | |
| 13 | 何海洋, 赵振根, 孔飞. 基于深度强化学习的固定翼无人机纵向控制[EB/OL]. [2024-11-09]. https://doi.org/10.13700/j.bh.1001-5965.2024.0075 |
| HE H Y, ZHAO Z G, KONG F, Longitudinal control of fixed-wing UAV based on deep reinforcement learning[EB/OL]. [2024-11-09]. https://doi.org/10.13700/j.bh.1001-5965.2024.0075. | |
| 14 | 黄旭, 柳嘉润, 贾晨辉, 等. 强化学习控制方法及在类火箭飞行器上的应用[J]. 宇航学报, 2023, 44 (5): 708- 718. |
| HUANG X, LIU J R, JIA C H, et al. Reinforcement learning control and its application on rocket-like vehicle[J]. Journal of Astronautics, 2023, 44 (5): 708- 718. | |
| 15 | LIU Y C, HUANG C Y. DDPG-based adaptive robust tracking control for aerial manipulators with decoupling approach[J]. IEEE Trans. on Cybernetics, 2021, 52 (8): 8258- 8271. |
| 16 |
WU Z H, LU J C, ZHOU Q, et al. Modified adaptive neural dynamic surface control for morphing aircraft with input and output constraints[J]. Nonlinear Dynamics, 2017, 87 (4): 2367- 2383.
doi: 10.1007/s11071-016-3196-0 |
| 17 | WU Z H, LU J C, SHI J P, et al. Robust adaptive neural control of morphing aircraft with prescribed performance[EB/OL]. [2024-11-09]. https://doi.org/10.1155/2017/1401427. |
| 18 | 路坤锋, 贾晨辉, 黄旭, 等. 面向变构型飞行器的强化学习位置姿态一体化控制方法[J]. 宇航学报, 2024, 45 (7): 1100- 1110. |
| LU K F, JIA C H, HUANG X, et al. Reinforcement learning-based integrated position and attitude control method towards morphing flight vehicles[J]. Journal of Astronautics, 2024, 45 (7): 1100- 1110. | |
| 19 | 丁溶, 曹承钰, 李繁飙, 等. 基于深度强化学习的变外形飞行器姿态控制[J]. 航天控制, 2024, 42 (2): 55- 61. |
| DING R, CAO C Y, LI F B, et al. Attitude control of morphing vehicle based on reinforcement learning[J]. Aerospace Control, 2024, 42 (2): 55- 61. | |
| 20 |
PI C H, YE W Y, CHENG S. Robust quadrotor control through reinforcement learning with disturbance compensation[J]. Applied Sciences, 2021, 11 (7): 3257.
doi: 10.3390/app11073257 |
| 21 | 马少捷, 惠俊鹏, 王宇航, 等. 变形飞行器深度强化学习姿态控制方法研究[J]. 航天控制, 2022, 40 (6): 3- 10. |
| MA S J, HUI J P, WANG Y H, et al. Research on attitude method of morphing aircraft based on deep reinforcement learning[J]. Aerospace Control, 2022, 40 (6): 3- 10. | |
| 22 |
ZHENG Y M, TAO J, SUN Q L, et al. Soft actor-critic based active disturbance rejection path following control for unmanned surface vessel under wind and wave disturbances[J]. Ocean Engineering, 2022, 247, 110631.
doi: 10.1016/j.oceaneng.2022.110631 |
| 23 | 王思鹏, 杜昌平, 郑耀. 基于强化学习的扑翼飞行器路径规划算法[J]. 控制与决策, 2022, 37 (4): 851- 860. |
| WANG S P, DU C P, ZHENG Y. Path planning algorithm for flapping-wing aircraft based on reinforcement learning[J]. Control and Decision, 2022, 37 (4): 851- 860. | |
| 24 |
JIN H Y, GAO Z Q. On the notions of normality, locality, and operational stability in ADRC[J]. Control Theory and Technology, 2023, 21, 97- 109.
doi: 10.1007/s11768-023-00131-4 |
| 25 | 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008. |
| HAN J Q. Active disturbance rejection control technique—the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008. | |
| 26 | 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998 (1): 19- 23. |
| HAN J Q. Active disturbance rejection controller and its application[J]. Control and Decision, 1998 (1): 19- 23. | |
| 27 | LILLICRAP T P. Continuous control with deep reinforcement learning[EB/OL]. [2024-11-09]. https://arxiv.org/abs/1509.02971. |
| 28 | FUJIMOTO S, HOOF H, MEGER D. Addressing function approximation error in actor-critic methods[C]//Proc. of the 35th International Conference on Machine Learning, 2018: 1587−1596. |
| 29 |
LIU J H, SHAN J Y, WANG J N, et al. Incremental sliding-mode control and allocation for morphing-wing aircraft fast manoeuvring[J]. Aerospace Science and Technology, 2022, 131, 107959.
doi: 10.1016/j.ast.2022.107959 |
| 30 | HAARNOJA T, ZHOU A, HARTIKAINEN K, et al. Soft actor-critic algorithms and applications[EB/OL]. [2024-11-14]. http://arxiv.org/abs/1812.05905. |
| 31 | HAARNOJA T, ZHOU A, ABBEEL P, et al. Soft actor-critic: off-policy maximum entropy deep reinforcement learning with a stochastic actor[C]//Proc. of the 35th International Conference on Machine Learning, 2018: 1861−1870. |
| [1] | Xiaolong WEI, Yarong WU, Dengkai YAO, Guhao ZHAO. Hierarchical decision-making algorithm for UAV air combat maneuvering based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(9): 2993-3003. |
| [2] | Yundou ZHU, Haiquan SUN, Xiaoxuan HU. Multi-satellite cooperative imaging task planning method based on pointer network architecture [J]. Systems Engineering and Electronics, 2025, 47(7): 2246-2255. |
| [3] | Linzhi MENG, Xiaojuan SUN, Yuxin HU, Bin GAO, Guoqing SUN, Wenhao MU. Reinforcement learning task scheduling algorithm for satellite on-orbit processing [J]. Systems Engineering and Electronics, 2025, 47(6): 1917-1929. |
| [4] | Kangjie ZHENG, Xinyu ZHANG, Weisong WANG, Zhensheng LIU. Intelligent ship dynamic autonomous obstacle avoidance decision based on DQN and rule [J]. Systems Engineering and Electronics, 2025, 47(6): 1994-2001. |
| [5] | Shuhan LIU, Tong LI, Fuqiang LI, Chungang YANG. Intent and situation-dual driven anti-jamming communication mechanism for data link [J]. Systems Engineering and Electronics, 2025, 47(6): 2055-2064. |
| [6] | Wei XIONG, Dong ZHANG, Zhi REN, Shuheng YANG. Research on intelligent decision-making methods for coordinated attack by manned aerial vehicles and unmanned aerial vehicles [J]. Systems Engineering and Electronics, 2025, 47(4): 1285-1299. |
| [7] | Peng MA, Rui JIANG, Bin WANG, Mengfei XU, Changbo HOU. Strategy reconstruction for resilience against intelligence jamming based on implicit opponent modeling [J]. Systems Engineering and Electronics, 2025, 47(4): 1355-1363. |
| [8] | Kaiqiang TANG, Huiqiao FU, Jiasheng LIU, Guizhou DENG, Chunlin CHEN. Hierarchical optimization research of constrained vehicle routing based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(3): 827-841. |
| [9] | Xiarong CHEN, Jichao LI, Gang CHEN, Peng LIU, Jiang JIANG. Portfolio of weapon system-of-systems based on heterogeneous information networks [J]. Systems Engineering and Electronics, 2025, 47(3): 855-861. |
| [10] | Yaozhong ZHANG, Zhuoran WU, Jiandong ZHANG, Qiming YANG, Guoqing SHI, Zixiang XU. UAV many-to-one pursuit-evasion game based on ME-DDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(10): 3288-3299. |
| [11] | Dong SUI, Xiangrong CAI. Continual learning mechanism for intelligent flight conflict resolution algorithm [J]. Systems Engineering and Electronics, 2025, 47(10): 3300-3312. |
| [12] | Tingyu ZHANG, Ying ZENG, Nan LI, Hongzhong HUANG. Spacecraft power-signal composite network optimization algorithm based on DRL [J]. Systems Engineering and Electronics, 2024, 46(9): 3060-3069. |
| [13] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [14] | Zhipeng YANG, Zihao CHEN, Chang ZENG, Song LIN, Jindi MAO, Kai ZHANG. Online route planning decision-making method of aircraft in complex environment [J]. Systems Engineering and Electronics, 2024, 46(9): 3166-3175. |
| [15] | Hongda GUO, Jingtao LOU, Youchun XU, Peng YE, Yongle LI, Jinsheng CHEN. Event-triggered communication of multiple unmanned ground vehicles collaborative based on MADDPG [J]. Systems Engineering and Electronics, 2024, 46(7): 2525-2533. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||