Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (6): 1994-2001.doi: 10.12305/j.issn.1001-506X.2025.06.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Intelligent ship dynamic autonomous obstacle avoidance decision based on DQN and rule
Kangjie ZHENG1, Xinyu ZHANG1,*, Weisong WANG1, Zhensheng LIU2
- 1. Navigation College, Dalian Maritime University, Dalian 116026, China
2. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
-
Received:2024-06-11Online:2025-06-25Published:2025-07-09 -
Contact:Xinyu ZHANG
CLC Number:
Cite this article
Kangjie ZHENG, Xinyu ZHANG, Weisong WANG, Zhensheng LIU. Intelligent ship dynamic autonomous obstacle avoidance decision based on DQN and rule[J]. Systems Engineering and Electronics, 2025, 47(6): 1994-2001.
share this article
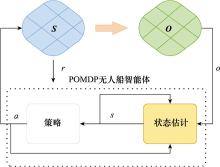
Fig.1
Schematic diagram of POMDP"
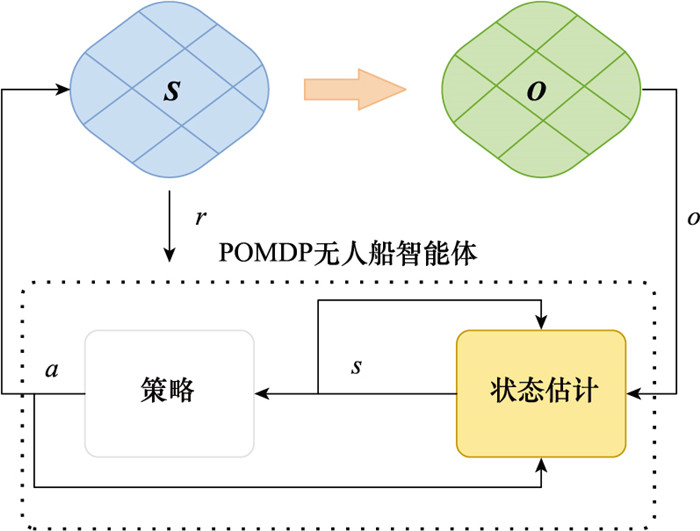
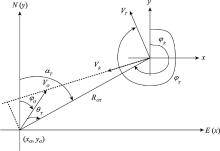
Fig.2
Model of ship motion"
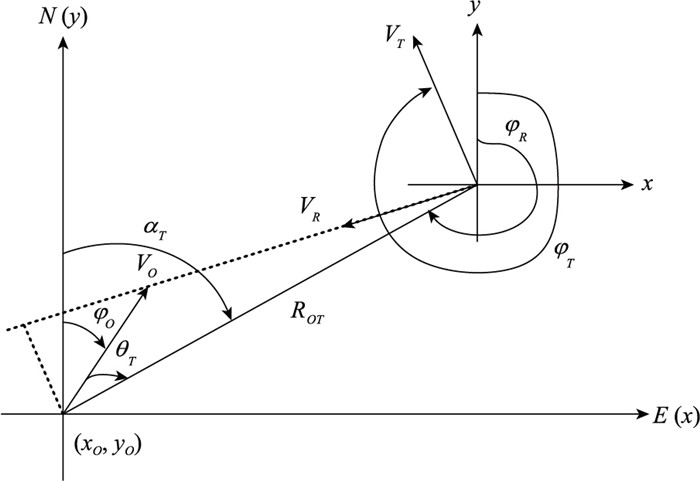

Fig.3
Classification of ship encounter situation based on COLREGs"
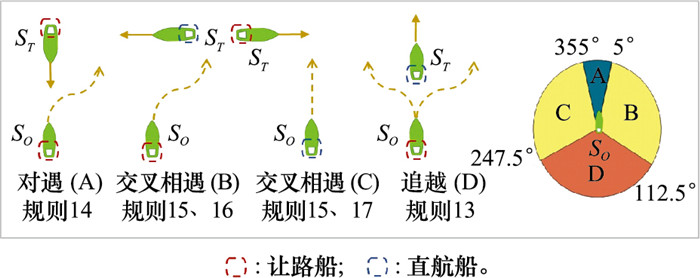
Fig.4
Training process of DQN"
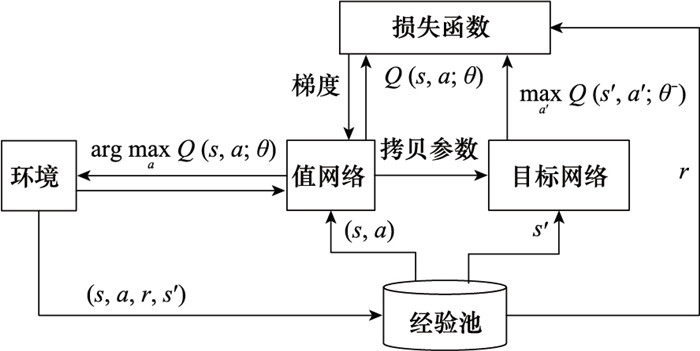
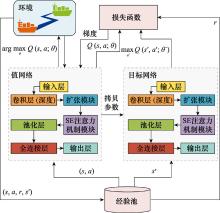
Fig.5
Algorithm training framework"
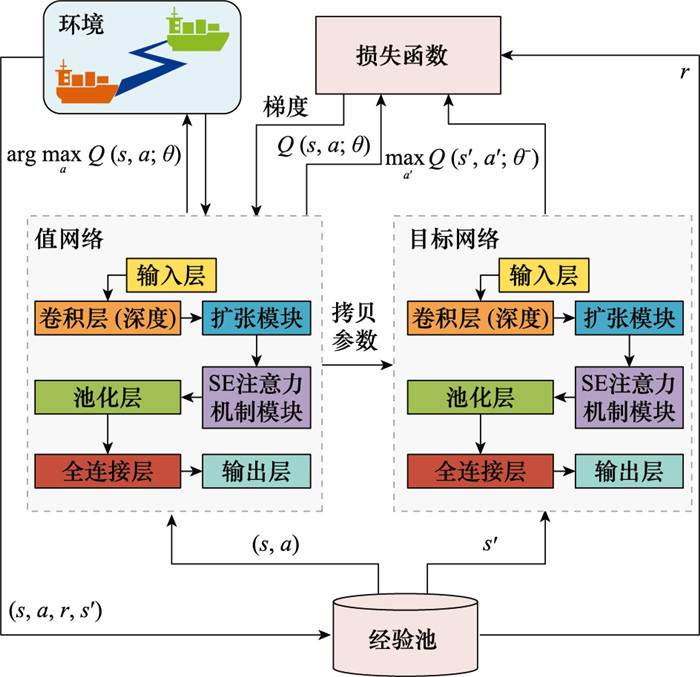
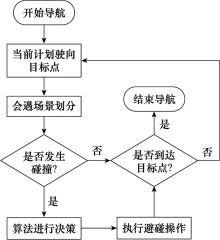
Fig.6
Overall process"
Table 1
Model parameter settings"
| 超参数 | 设置值 |
| 学习率 | 0.000 1 |
| 经验池大小 | 1 000 000 |
| 折扣因子 | 0.98 |
| 目标网络更新步数 | 10 000 |
| 网络优化器 | Adam |
| 激活函数 | ReLU |
| mini-batch大小 | 32 |
Table 2
MobileNetDQN's parameter settings"
| 输入大小 | 操作类型 | exp size | #out | SE | NL | s |
| 1502×3 | Conv2D | 3 | 16 | √ | RE | 2 |
| 752×16 | Conv2D | 3 | 16 | - | RE | 2 |
| 752×16 | Bottleneck | 3 | 72 | - | RE | 2 |
| 382×72 | Bottleneck | 3 | 88 | √ | RE | 1 |
| 382×88 | Bottleneck | 5 | 96 | √ | HS | 2 |
| 192×96 | Bottleneck | 5 | 240 | √ | HS | 1 |
| 192×240 | Bottleneck | 5 | 240 | √ | HS | 1 |
| 192×240 | Bottleneck | 5 | 120 | √ | HS | 1 |
| 192×120 | Bottleneck | 5 | 144 | √ | HS | 1 |
| 192×144 | Bottleneck | 5 | 288 | √ | HS | 2 |
| 102×288 | Bottleneck | 5 | 576 | √ | HS | 1 |
| 102×575 | Bottleneck | 5 | 576 | √ | HS | 1 |
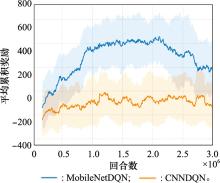
Fig.7
Average cumulative reward"
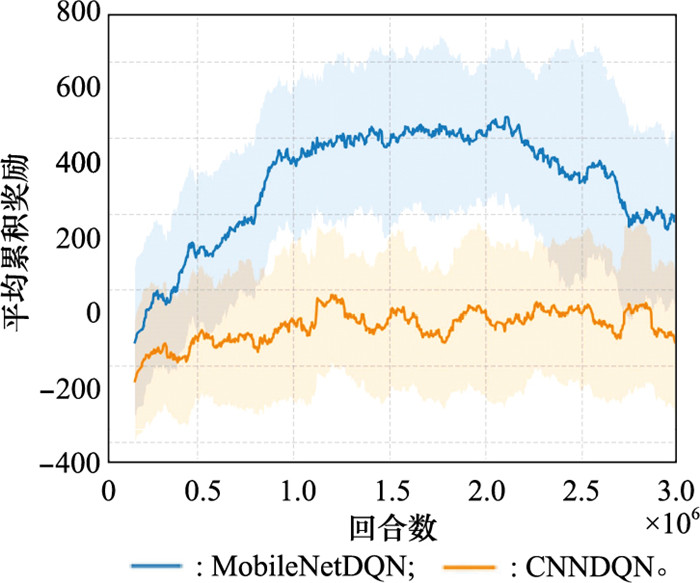
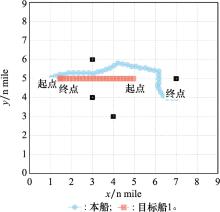
Fig.8
Result of encounter"
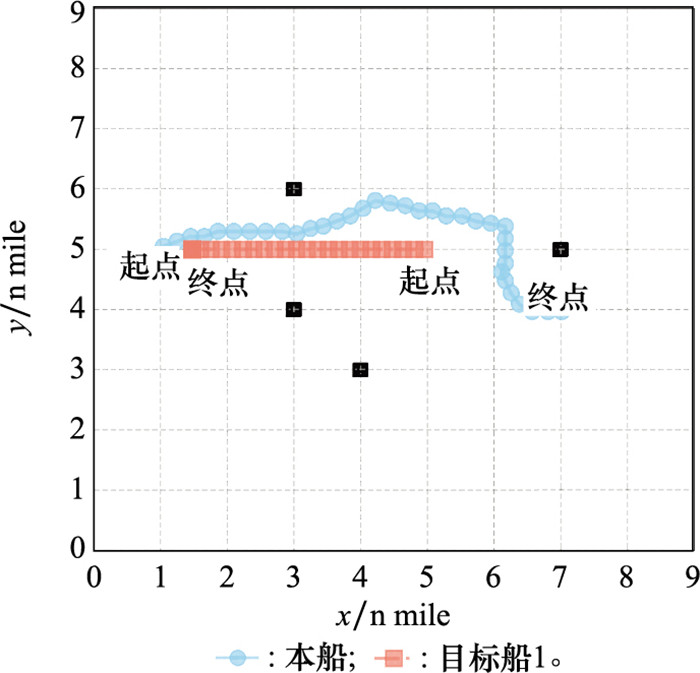
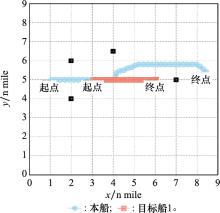
Fig.9
Result of overtaking"
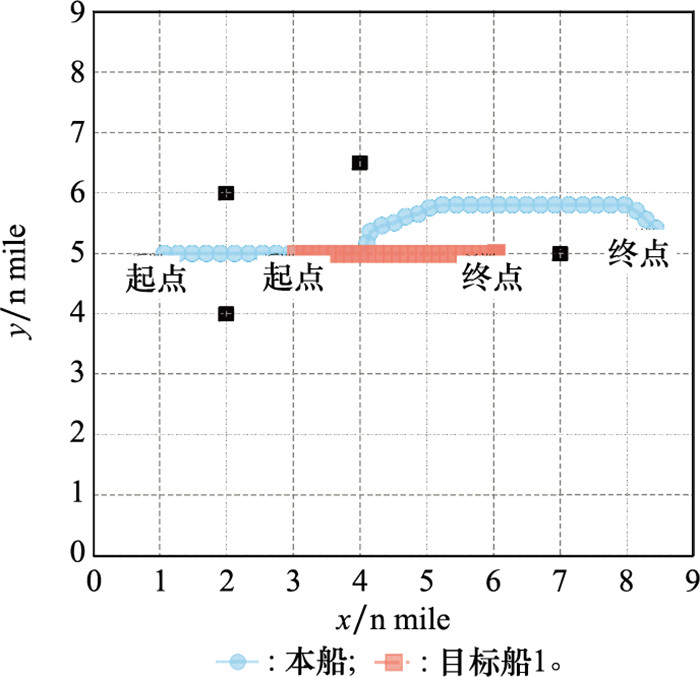
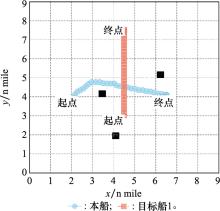
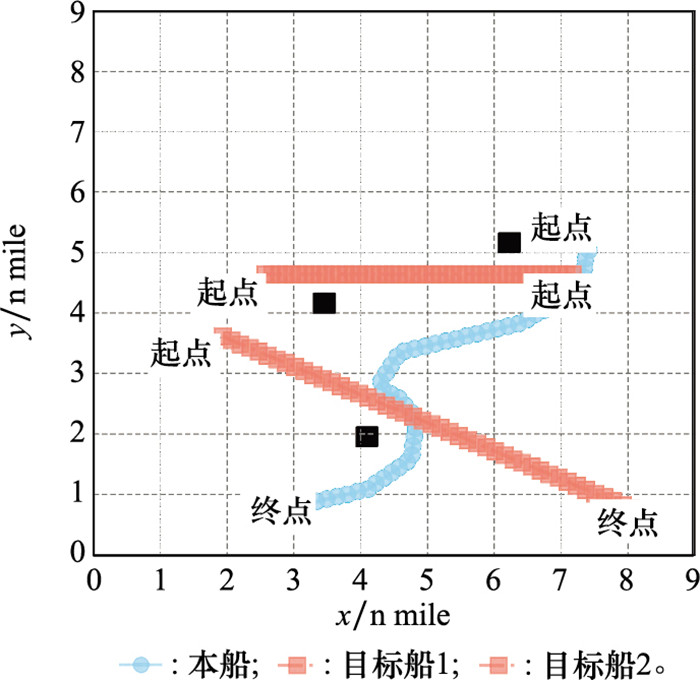
Fig.10
Result of crossing encounter"
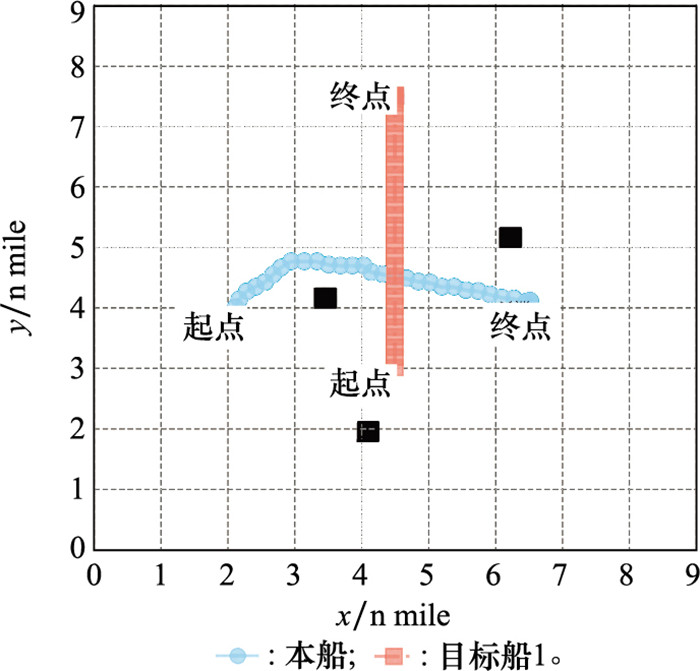
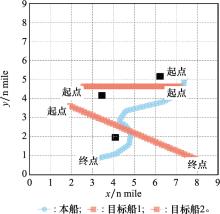
Fig.11
Result of three ships encounter"
| 1 | ROBLES A C. The COLREGS, mariners, and states[M]//ALFREDO C, ROBLES Jr. Vessel collisions in the law of the sea: the South China Sea arbitration. Singapore: Springer, 2022: 41-75. |
| 2 | 王耀南, 安果维, 王传成, 等. 智能无人系统技术应用与发展趋势[J]. 中国舰船研究, 2022, 17 (5): 9- 26. |
| WANG Y N , AN G W , WANG C C , et al. Technology application and development trend of intelligent unmanned system[J]. Chinese Journal of Ship Research, 2022, 17 (5): 9- 26. | |
| 3 | LIU B , SOARES C G . Recent developments in ship collision a nalysis and challenges to an accidental limit state design method[J]. Ocean Engineering, 2023, 270 (1): 113636- 113644. |
| 4 | LI B D , LU J , LU H , et al. Predicting maritime accident consequence scenarios for emergency response decisions using optimization-based decision tree approach[J]. Maritime Policy & Management, 2023, 50 (1): 19- 41. |
| 5 | GAN L X , YE B Y , HUANG Z Q , et al. Knowledge graph construction based on ship collision accident reports to improve maritime traffic safety[J]. Ocean & Coastal Management, 2023, 240 (2): 106660- 106674. |
| 6 | 赵燕, 苑茹滨, 刘帅, 等. 基于航行经验的智能船舶自主避碰算法研究[J]. 天津航海, 2023, 251 (2): 68- 74. |
| ZHAO Y , YUAN R B , LIU S , et al. Research on intelligent ship autonomous collision avoidance algorithm based on navigation experience[J]. Tianjin Navigation, 2023, 251 (2): 68- 74. | |
| 7 | YU Q , TEIXEIRA A P , LIU K , et al. Framework and application of multi-criteria ship collision risk assessment[J]. Ocean Engineering, 2022, 250 (4): 111006. |
| 8 |
HWANG T , YOUN I H . Development of a graph-based collision risk situation model for validation of autonomous ships' collision avoidance systems[J]. Journal of Marine Science and Engineering, 2023, 11 (11): 2037- 2046.
doi: 10.3390/jmse11112037 |
| 9 |
赵贵祥, 王晨旭, 王贺平, 等. 改进速度障碍法的无人艇局部路径规划[J]. 系统工程与电子技术, 2023, 45 (12): 3975- 3983.
doi: 10.12305/j.issn.1001-506X.2023.12.28 |
|
ZHAO G X , WANG C X , WANG H P , et al. Local path planning for unmanned surface vehicle using improved velocity obstacle method[J]. Systems Engineering and Electronics, 2023, 45 (12): 3975- 3983.
doi: 10.12305/j.issn.1001-506X.2023.12.28 |
|
| 10 |
陈天德, 黄炎焱, 张永亮. 基于碰撞危险度的无陷阱动态航路规划[J]. 系统工程与电子技术, 2019, 41 (11): 2496- 2506.
doi: 10.3969/j.issn.1001-506X.2019.11.13 |
|
CHEN T D , HUANG Y Y , ZHANG Y L . Non-trap dynamic path planning based on collision risk[J]. Systems Engineering and Electronics, 2019, 41 (11): 2496- 2506.
doi: 10.3969/j.issn.1001-506X.2019.11.13 |
|
| 11 | 丁振国, 张树奎, 胡甚平. 长江水道事故风险预测模型优化[J]. 上海海事大学学报, 2022, 43 (1): 66- 70. |
| DING Z G , ZHANG S K , HU S P . Optimization of accident risk prediction model for Yangtze river waterway[J]. Journal of Shanghai Maritime University, 2022, 43 (1): 66- 70. | |
| 12 | ZHONG S B , WEN Y Q , HUANG Y M , et al. Ontological ship behavior modeling based on COLREGs for knowledge reasoning[J]. Journal of Marine Science and Engineering, 2022, 10 (2): 203- 223. |
| 13 | VOLKOVA T A , BALYKINA Y E , BESPALOV A . Predicting ship trajectory based on neural networks using AIS data[J]. Journal of Marine Science and Engineering, 2021, 9 (3): 254- 265. |
| 14 | 丁志国, 张新宇, 王程博, 等. 基于驾驶实践的无人船智能避碰决策方法[J]. 中国舰船研究, 2021, 16 (1): 96- 104. |
| DING Z G , ZHANG X Y , WANG C B , et al. Intelligent collision avoidance decision-making method for unmanned ships based on driving practice[J]. Chinese Journal of Ship Research, 2021, 16 (1): 96- 104. | |
| 15 | XIE S , GAROFANO V , CHU X M , et al. Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks[J]. Ocean Engineering, 2019, 193 (5): 106609- 106633. |
| 16 | HU J Y , YAN D W , ZHENG J . Embed behavior decision making into ship collision avoidance path planning based on ant colony and Q-learning algorithm[J]. Industrial Engineering and Innovation Management, 2022, 5 (1): 20- 28. |
| 17 | WANG C B , ZHANG X Y , YANG Z L , et al. Collision avoidance for autonomous ship using deep reinforcement learning and prior-knowledge-based approximate representation[J]. Frontiers in Marine Science, 2023, 9 (3): 1084763- 1084777. |
| 18 | WANG C B , ZHANG X Y , GAO H B , et al. Optimizing anti-collision strategy for MASS: a safe reinforcement learning approach to improve maritime traffic safety[J]. Ocean & Coastal Management, 2024, 253 (54): 107161- 107186. |
| 19 | WANG C B , ZHANG X Y , GAO H B , et al. COLERGs-constrained safe reinforcement learning for realising MASS's risk-informed collision avoidance decision making[J]. Knowledge-Based Systems, 2024, 300 (8): 112205- 112225. |
| 20 | WANG C B , WANG N , GAO H B , et al. Knowledge transfer enabled reinforcement learning for efficient and safe autonomous ship collision avoidance[J]. International Journal of Machine Learning and Cybernetics, 2024, 15, 3714- 3731. |
| 21 | CUI Z W , GUAN W , ZHANG X K . Collision avoidance decision-making strategy for multiple USVs based on deep reinforcement learning algorithm[J]. Ocean Engineering, 2024, 308 (2): 118323- 118343. |
| 22 |
ZHANG X Y , ZHENG K J , WANG C B , et al. A novel deep reinforcement learning for POMDP-based autonomous ship collision decision-making[J]. Neural Computing and Applications,
doi: 10.1007/s00521-023-08908-z |
| 23 | JIANG L L , AN L X , ZHANG X Y , et al. A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning[J]. Ocean Engineering, 2022, 264 (3): 112378- 112390. |
| 24 | ZHENG K J , ZHANG X Y , WANG C B , et al. A partially observable multi-ship collision avoidance decision-making model based on deep reinforcement learning[J]. Ocean & Coastal Management, 2023, 242 (3): 106689- 106704. |
| 25 | SPAAN M T J. Partially observable Markov decision processes[M]// Reinforcement learning: state-of-the-art. WIERING M, OTTERLO M V. Heidelberg: Springer, 2012: 387-414. |
| 26 | RVOLODYMY M , KORAY K , DAVID S , et al. Human-level control through deep reinforcement learning[J]. Nature, 2018, 518 (7540): 529- 533. |
| 27 | TESAURO G . A self-teaching backgammon program, achieves master-level play[J]. Neural Computation, 1994, 6 (2): 215- 219. |
| 28 | WATTER M , SPRINGENBERG J , BOEDECKER J , et al. Embed to control: a locally linear latent dynamics model for control from raw images[J]. Advances in Neural Information Processing Systems, 2015, 28 (2): 165- 168. |
| 29 | HOWARD A G, ZHU M, CHEN B, et al. Mobilenets: efficient convolutional neural networks for mobile vision applications[EB/OL]. [2024-05-11]. https://arxiv.org/abs/1704.04861. |
| 30 | HOWARD A, SANDLER M, CHU G, et al. Searching for mobilenetv3[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 1314-1324. |
| [1] | Kaiqiang TANG, Huiqiao FU, Jiasheng LIU, Guizhou DENG, Chunlin CHEN. Hierarchical optimization research of constrained vehicle routing based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(3): 827-841. |
| [2] | Tingyu ZHANG, Ying ZENG, Nan LI, Hongzhong HUANG. Spacecraft power-signal composite network optimization algorithm based on DRL [J]. Systems Engineering and Electronics, 2024, 46(9): 3060-3069. |
| [3] | Zhipeng YANG, Zihao CHEN, Chang ZENG, Song LIN, Jindi MAO, Kai ZHANG. Online route planning decision-making method of aircraft in complex environment [J]. Systems Engineering and Electronics, 2024, 46(9): 3166-3175. |
| [4] | Mengyu ZHANG, Yajie DOU, Ziyi CHEN, Jiang JIANG, Kewei YANG, Bingfeng GE. Review of deep reinforcement learning and its applications in military field [J]. Systems Engineering and Electronics, 2024, 46(4): 1297-1308. |
| [5] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [6] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [7] | XIE Hao, GUO Aihuang, SONG Chunlin, JIAO Runze. eNB selection for LTE-V using deep reinforcement learning [J]. Systems Engineering and Electronics, 2019, 41(7): 1652-1657. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||