Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (11): 3765-3778.doi: 10.12305/j.issn.1001-506X.2025.11.24
• Guidance, Navigation and Control • Previous Articles
Technology for countering dynamic multi-target motion control using distributed drone swarm systems
Chen WANG1,2, Cheng ZHU1,2,*, Xiangke WANG3, Zhaoyun DING1,2, Qianzhen ZHANG1,2, Sheng ZHANG1,2, Xianqiang ZHU1,2
- 1. College of Systems Engineering,National University of Defense Technology,Changsha 410073,China
2. National Key Laboratory of Information System Engineering,National University of Defense Technology,Changsha 410073,China
3. College of Intelligence Science and Technology,National University of Defense Technology,Changsha 410073,China
-
Received:2024-12-05Online:2025-11-25Published:2025-12-08 -
Contact:Cheng ZHU
CLC Number:
Cite this article
Chen WANG, Cheng ZHU, Xiangke WANG, Zhaoyun DING, Qianzhen ZHANG, Sheng ZHANG, Xianqiang ZHU. Technology for countering dynamic multi-target motion control using distributed drone swarm systems[J]. Systems Engineering and Electronics, 2025, 47(11): 3765-3778.
share this article
Fig.1
Technical framework for distributed swarm motion control"

Fig.2
Concentration mapping curves of GRN"

Fig.3
Environmental information concentration map of GRN mapping"
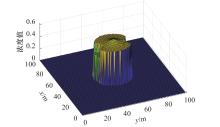
Fig.4
Local environmental information concentration map of GRN"
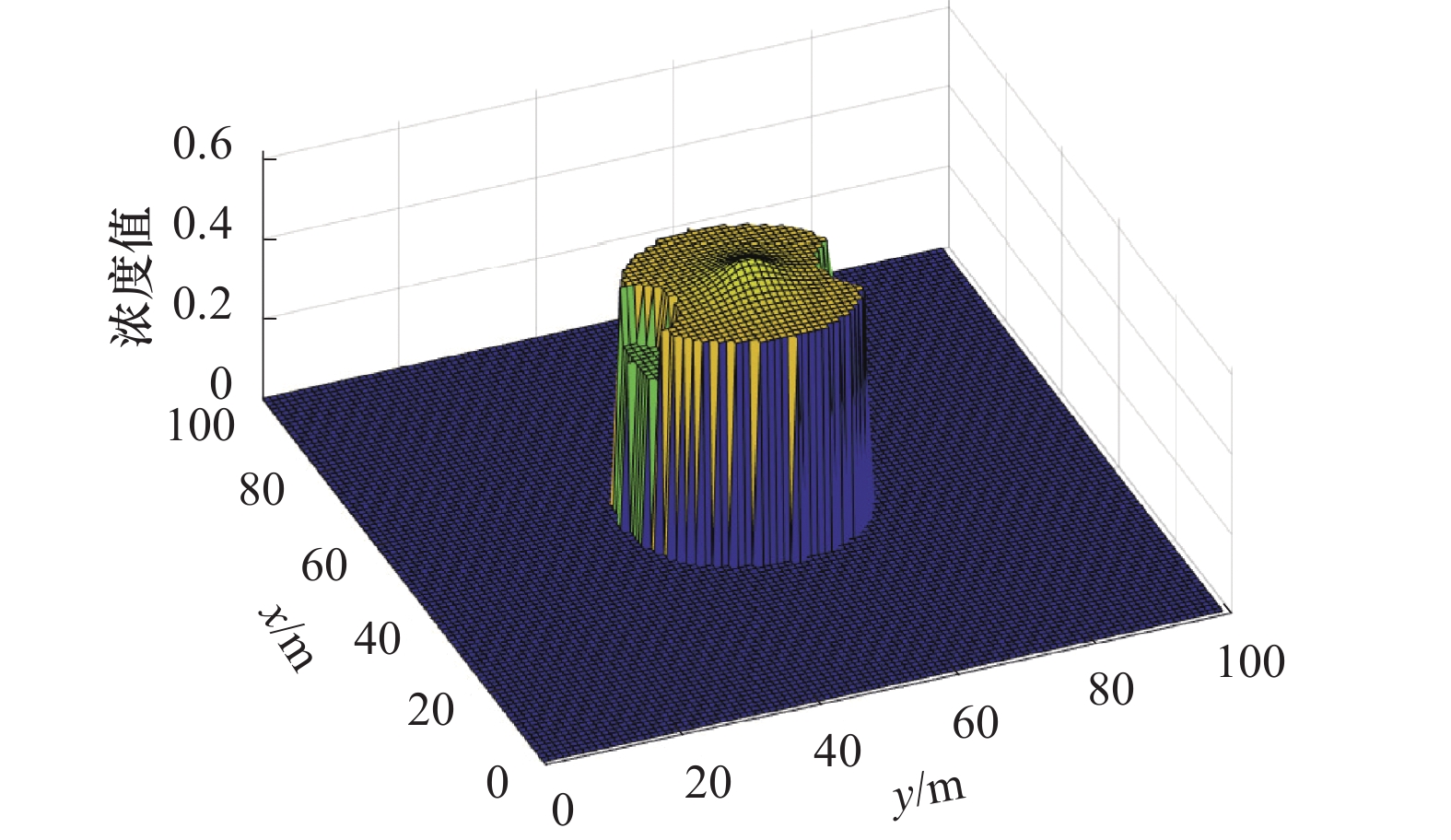
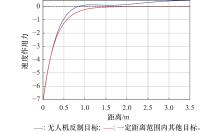
Fig.5
Curve of the velocity effect of the drone on the countered target and non-countered targets as it varies with distance"
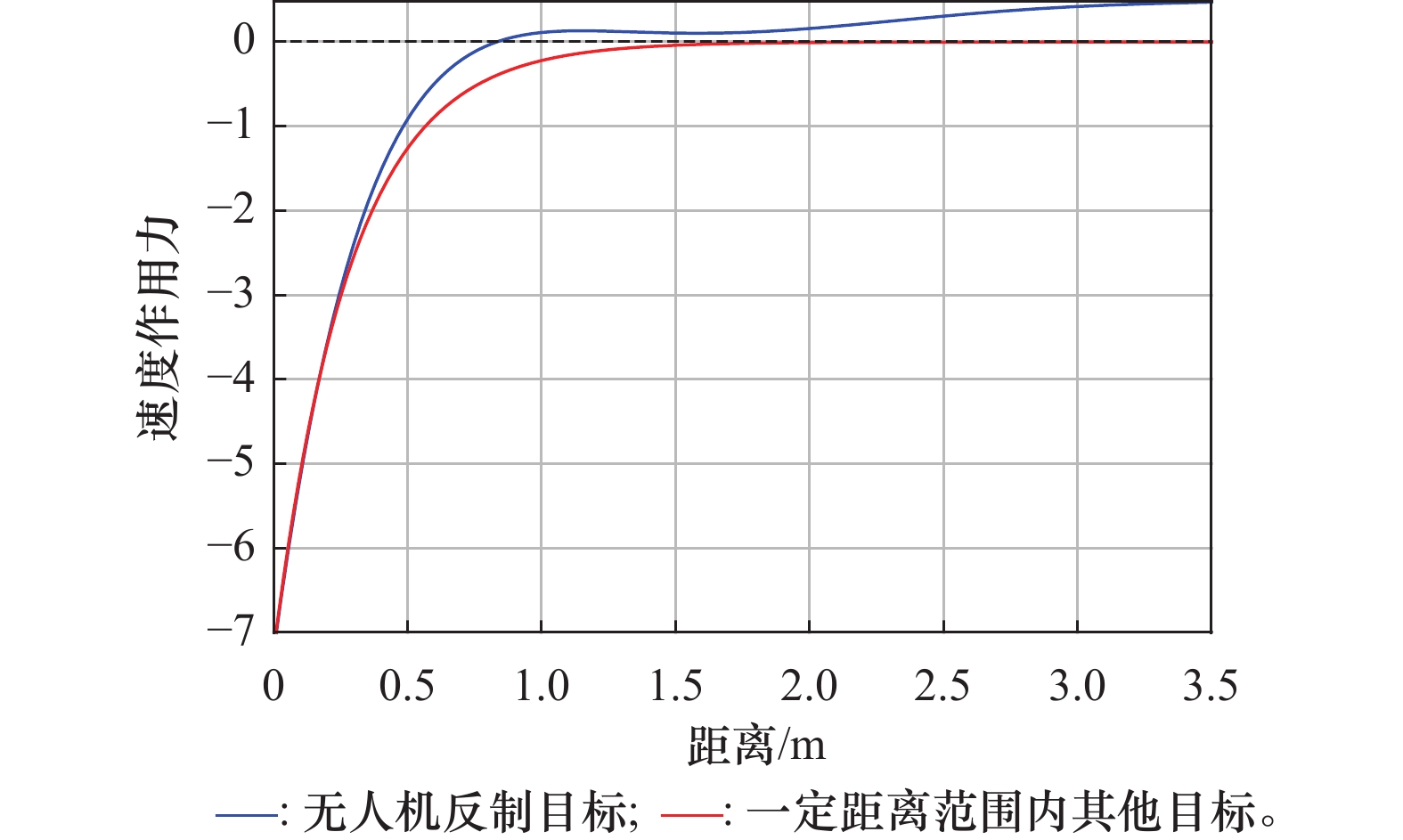

Fig.6
Schematic diagram of 12 drones conducting distributed swarm movements in a static threat area to counter a single target"
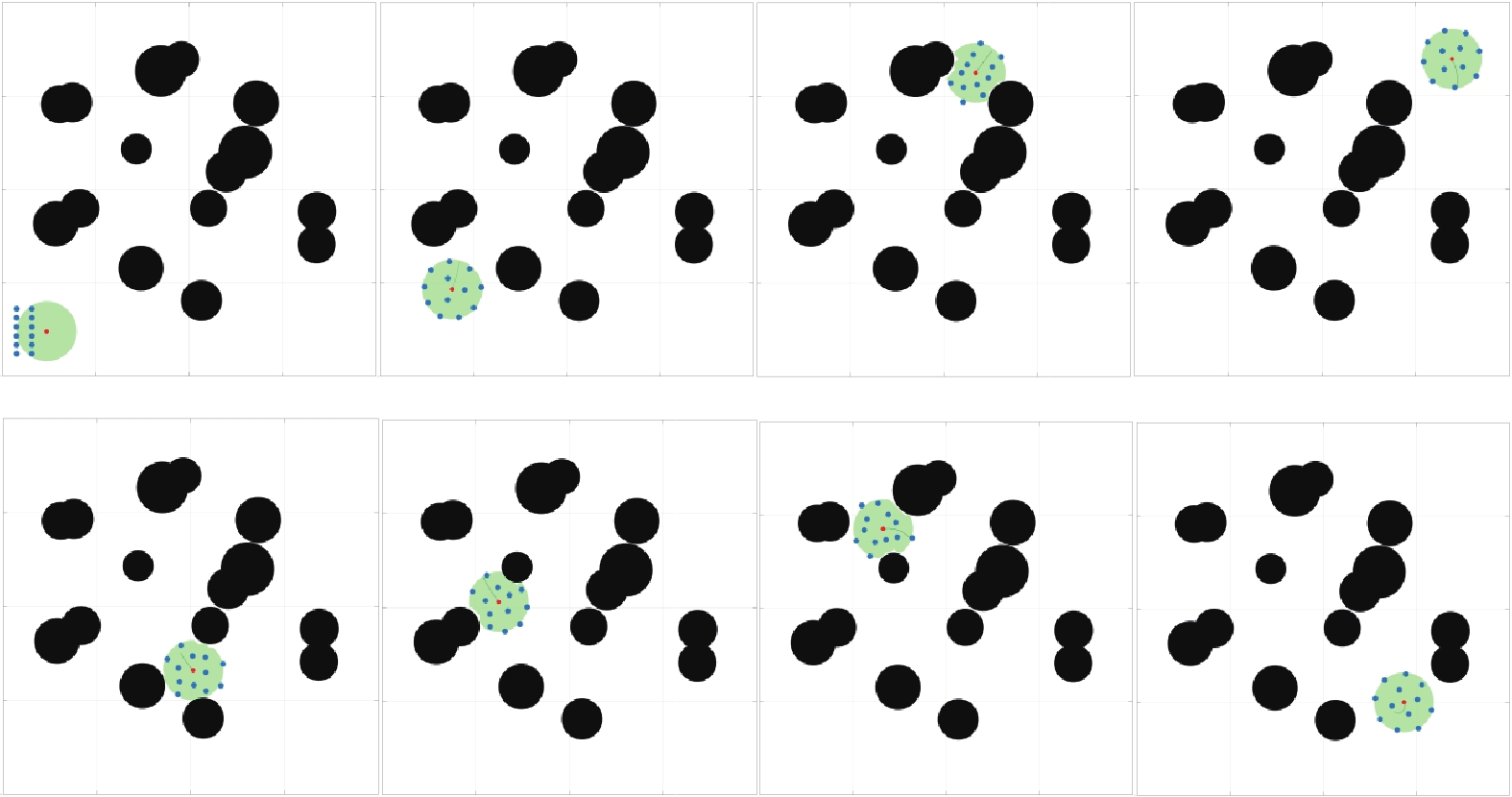

Fig.7
Schematic diagram of 16 drones conducting distributed swarm movements in a static threat area to counter a single target"
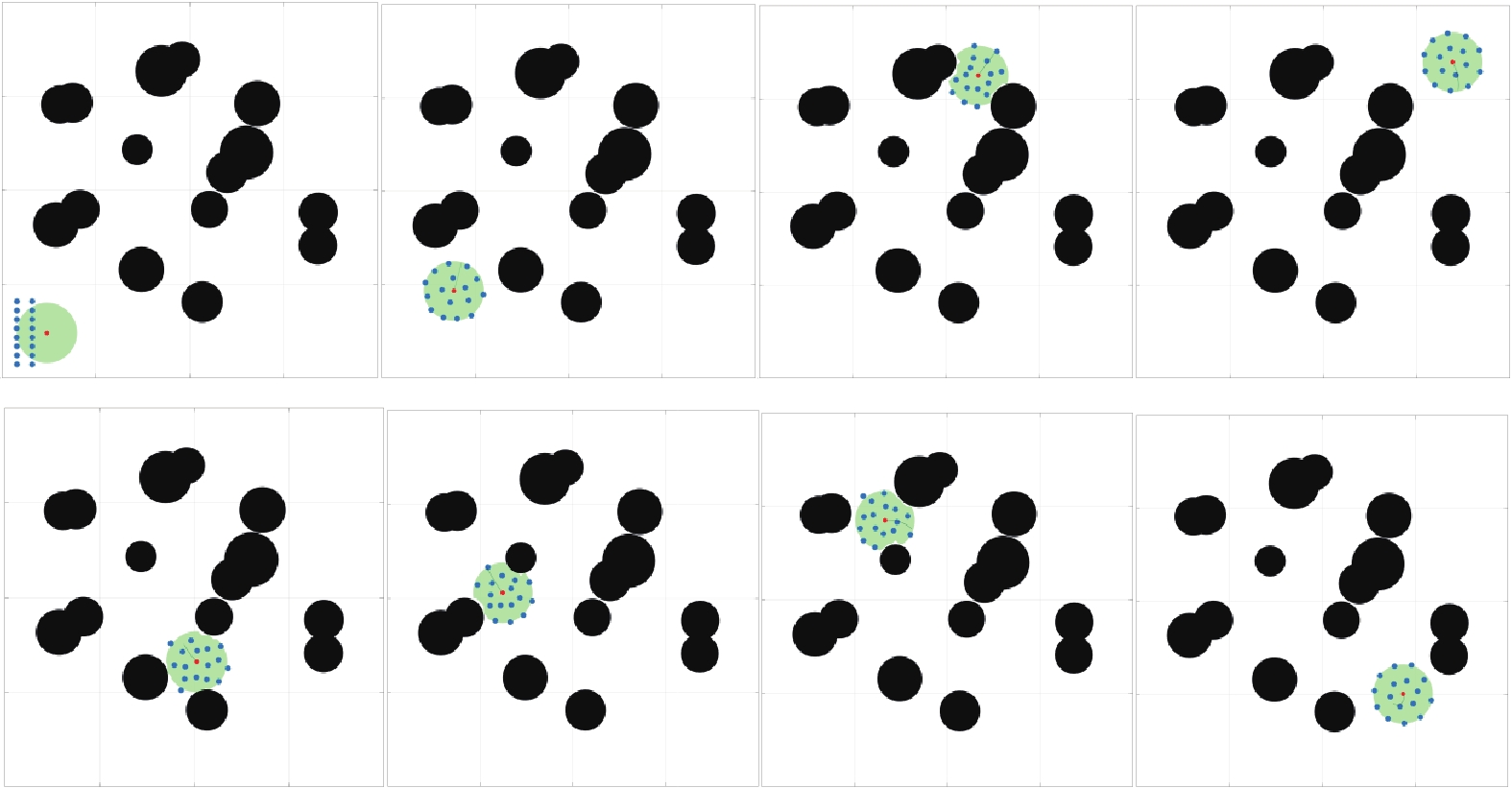

Fig.8
Schematic diagram of 20 drones conducting distributed swarm movements in a static threat area to counter a single target"
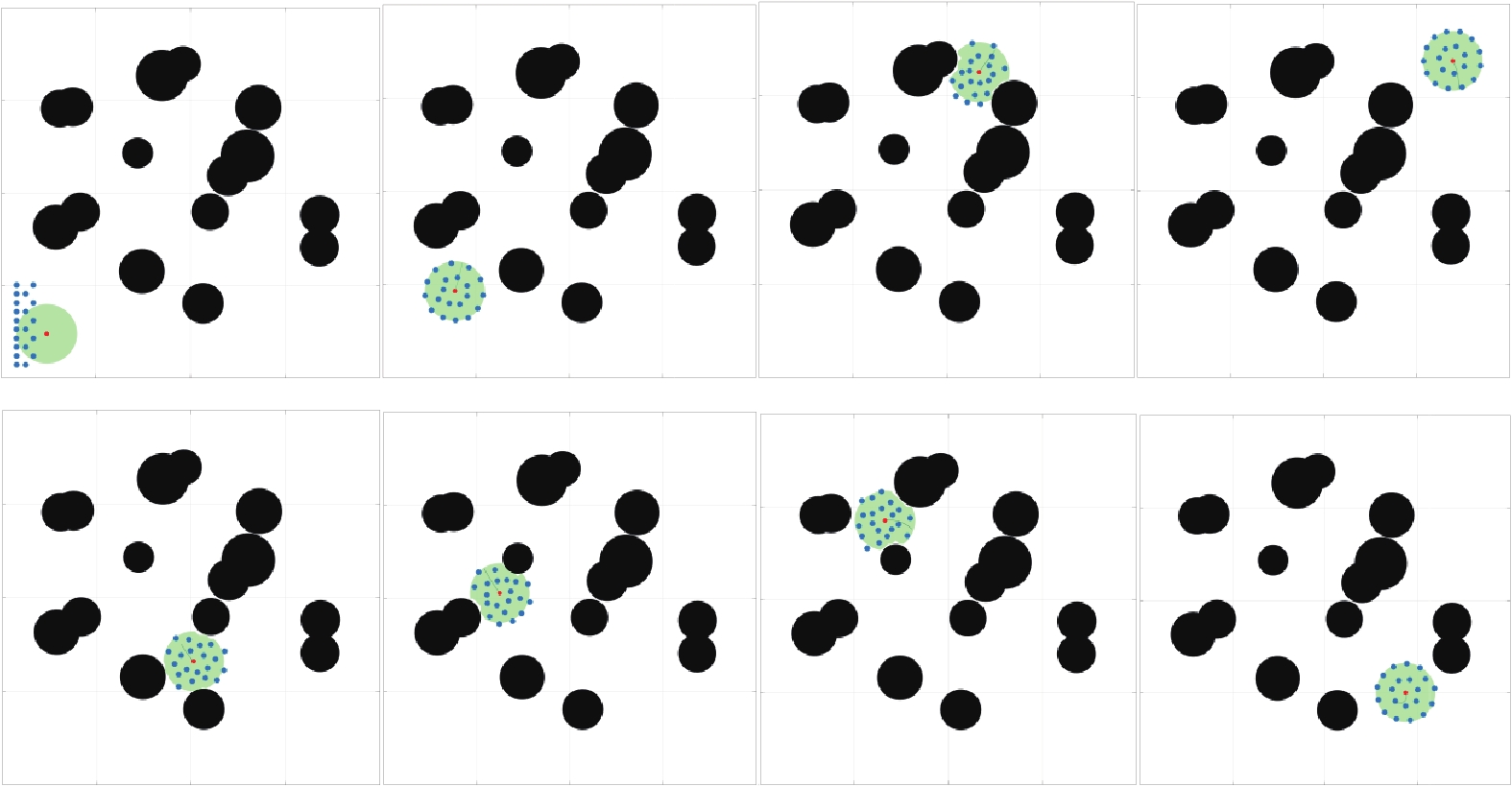

Fig.9
Schematic diagram of 20 drones conducting distributed swarm movements in a dynamic threat area to counter two targets (GRN method)"
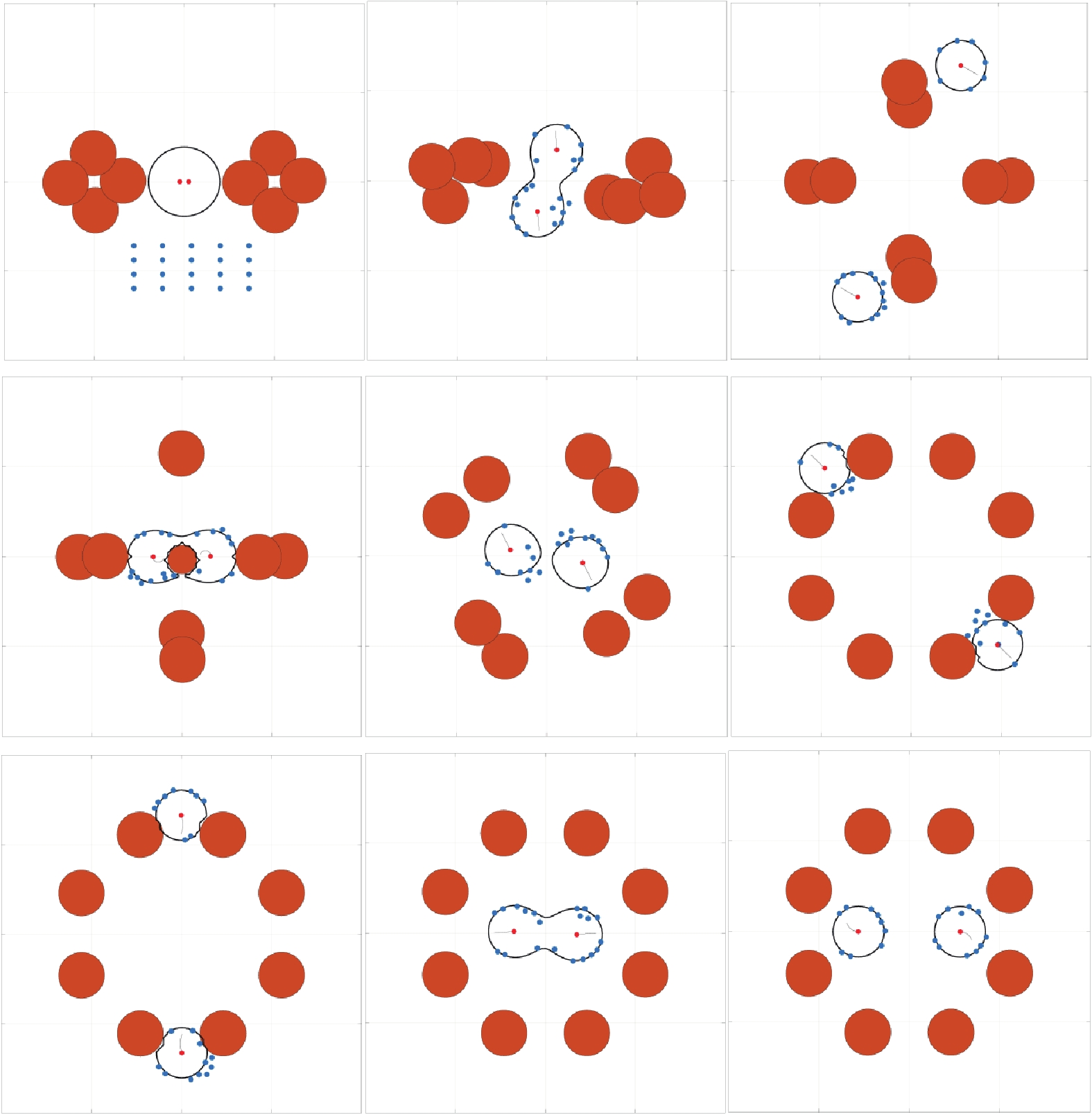
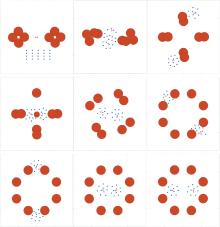
Fig.10
Schematic diagram of 20 drones conducting distributed swarm movements in a dynamic threat area to counter two targets (AGENT method)"
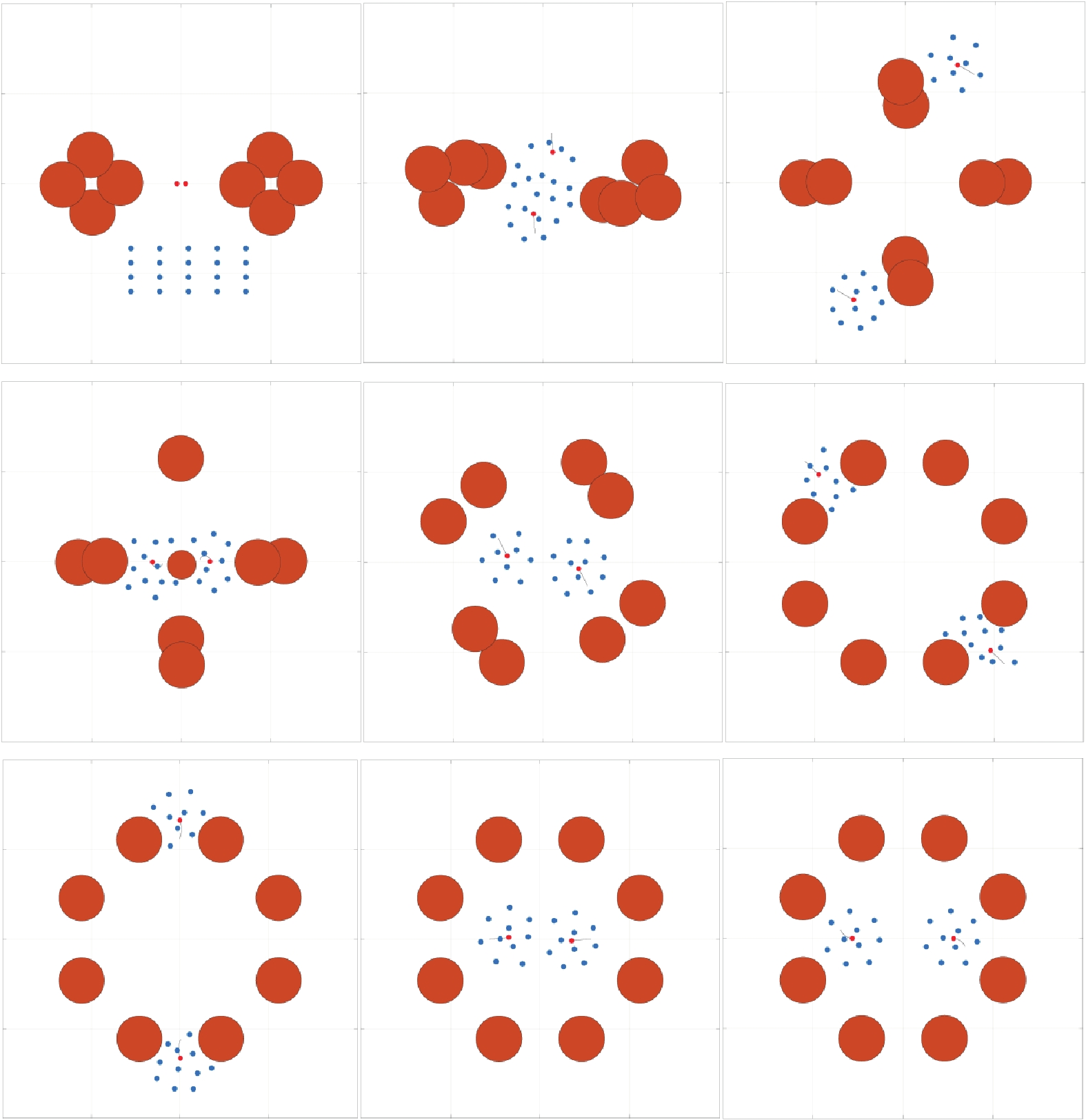

Fig.11
Schematic diagram of 20 drones conducting distributed swarm movements in a dynamic threat area to counter two targets (TACTICS method)"
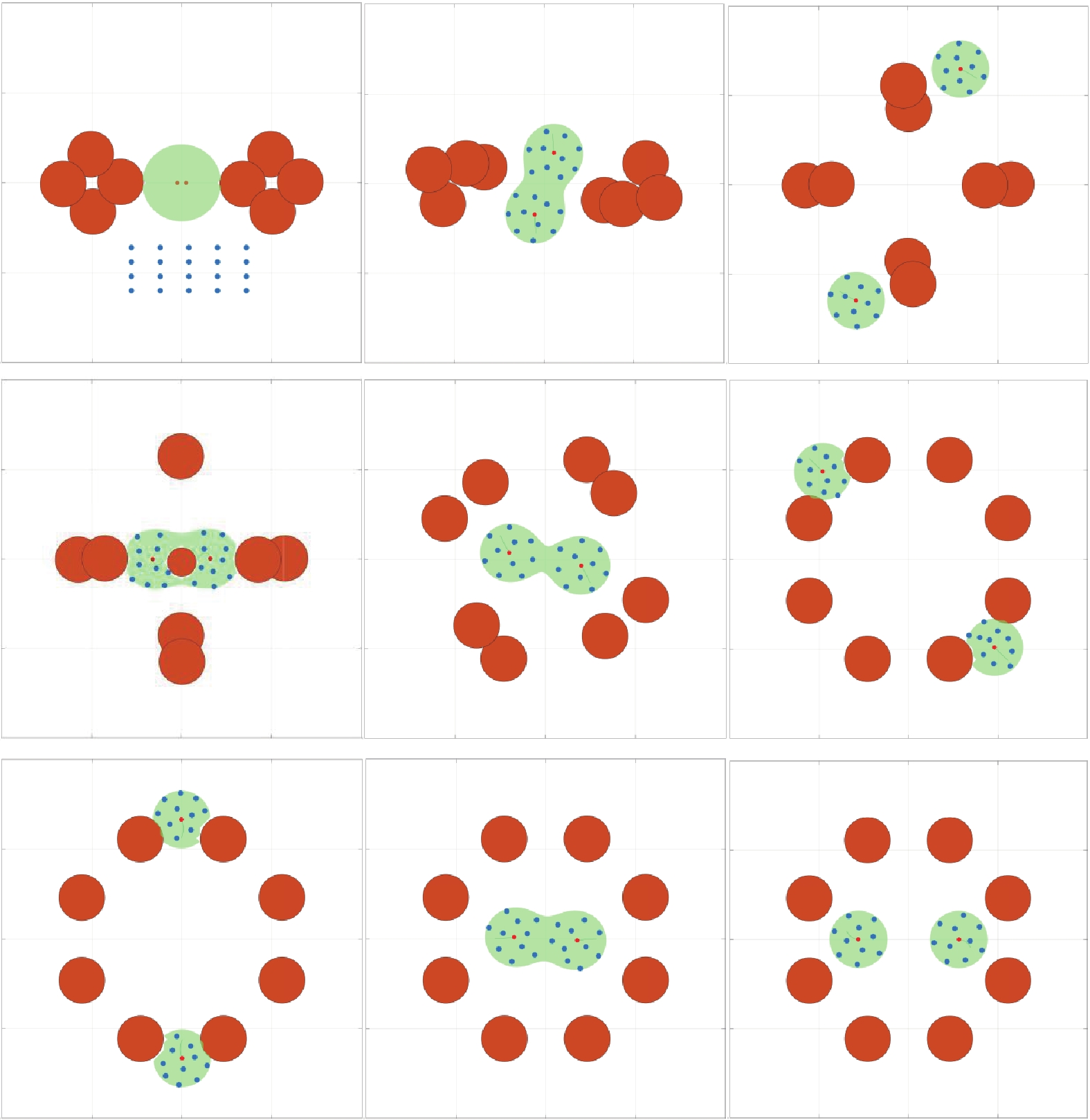

Fig.12
Force distribution effects of 20 drones countering two targets"
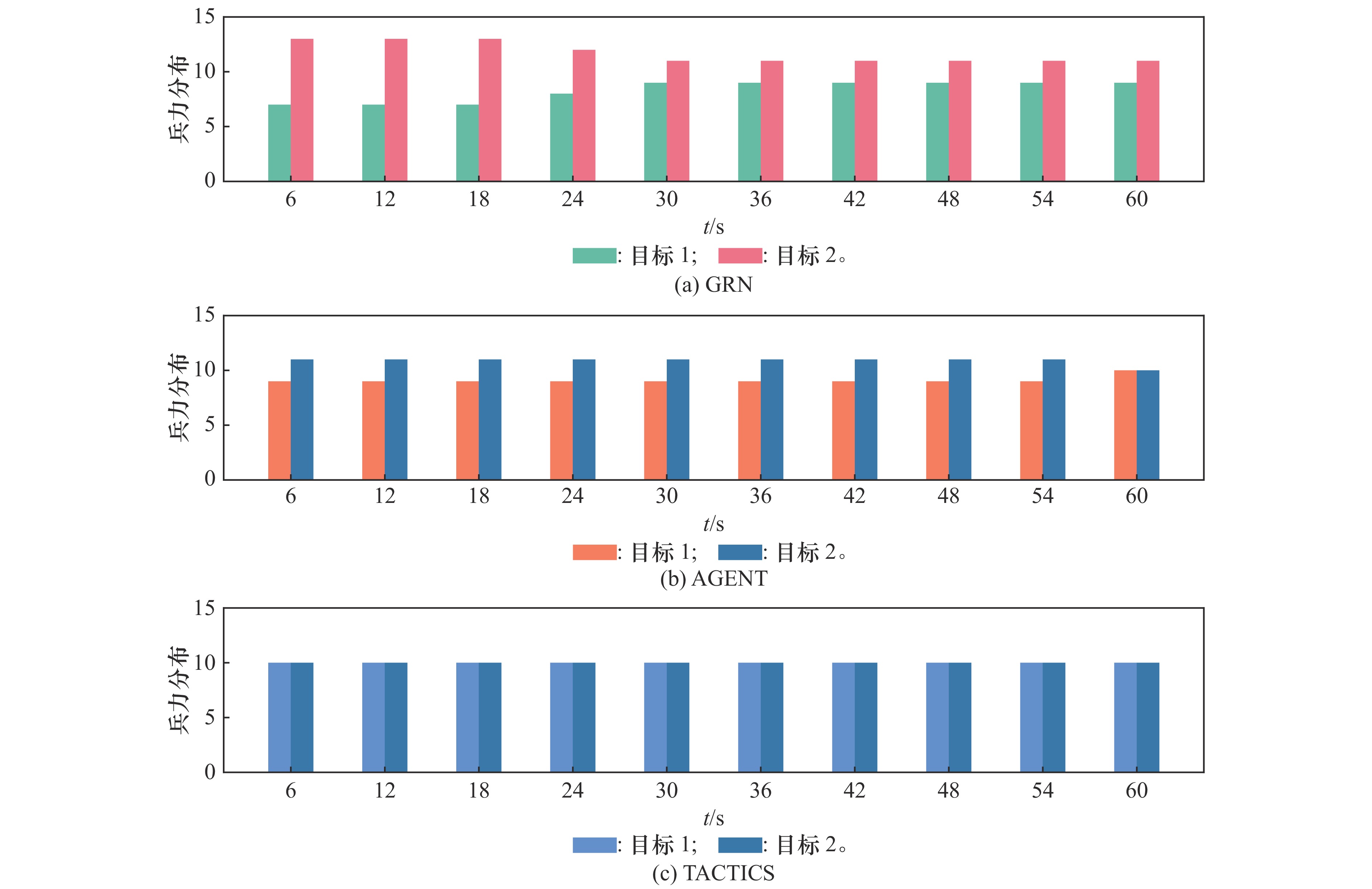
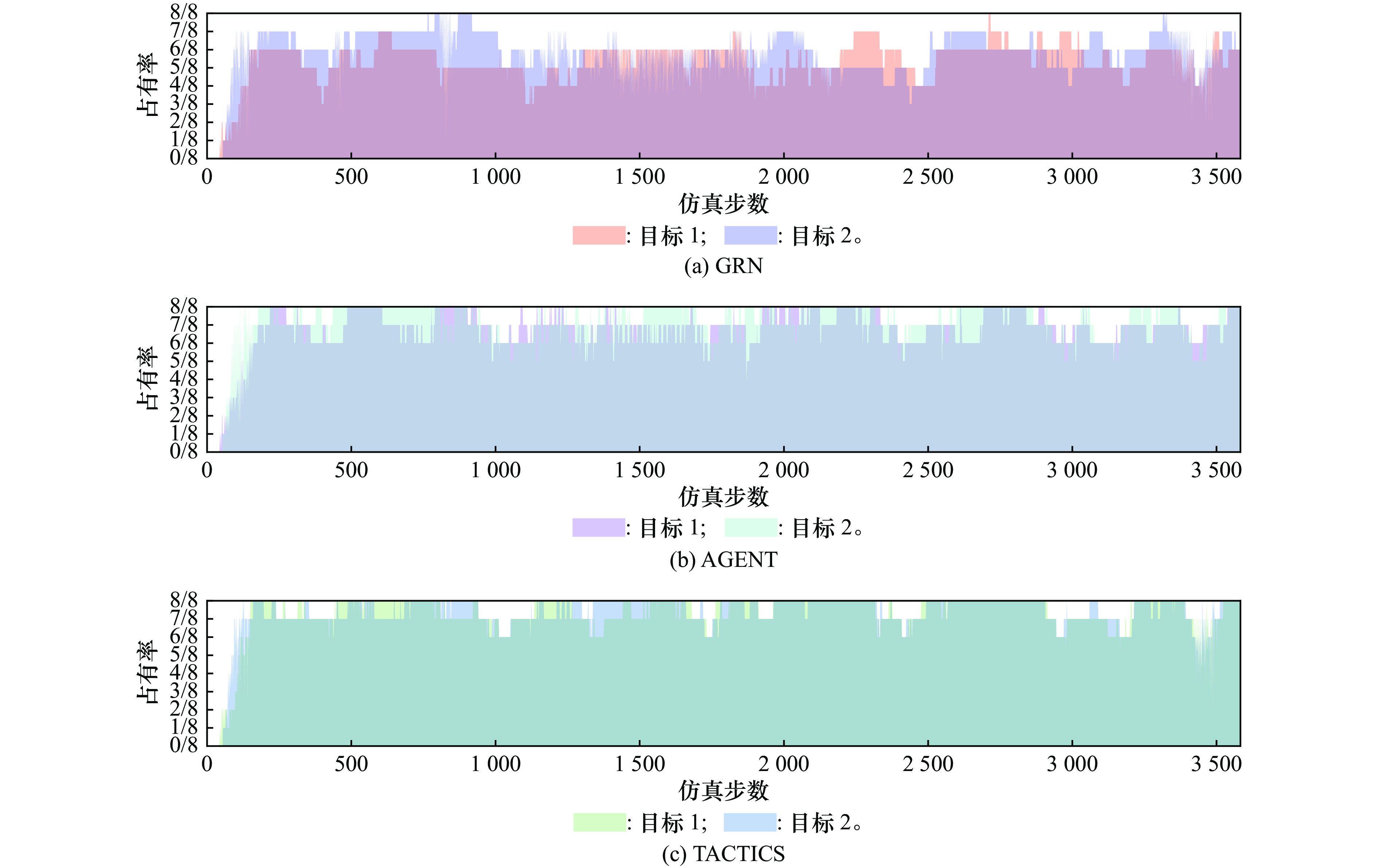
Fig.13
Target encirclement rate of two targets by 20 drones under different countermeasure methods"
Fig.14
Average value of the minimum distance between drones in the two drone groups countering two targets with subtraction of the minimum distance, and the minimum distance between all drones"
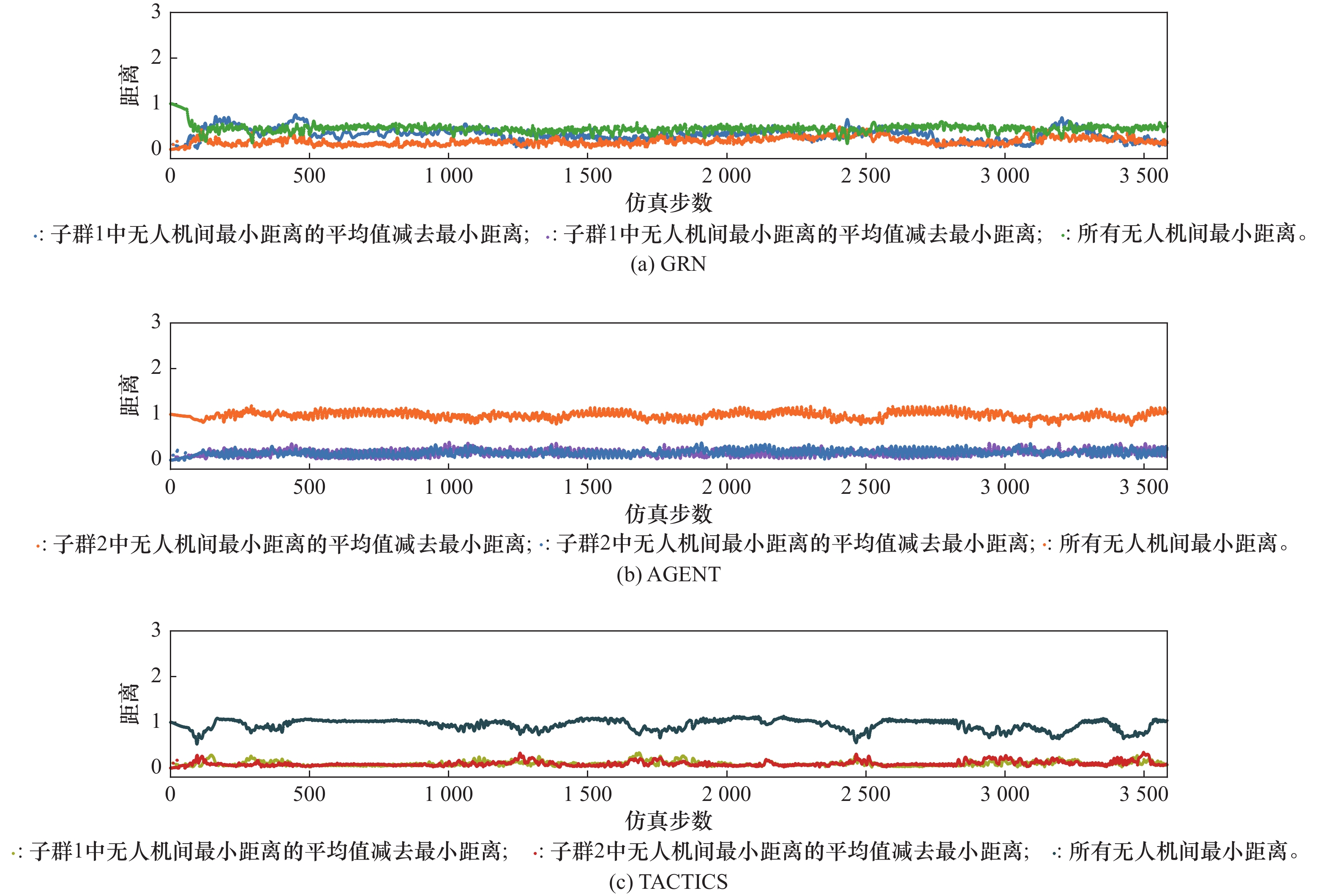

Fig.15
Average distance of drones to their respective targets and the minimum distance of all drones to the two targets"
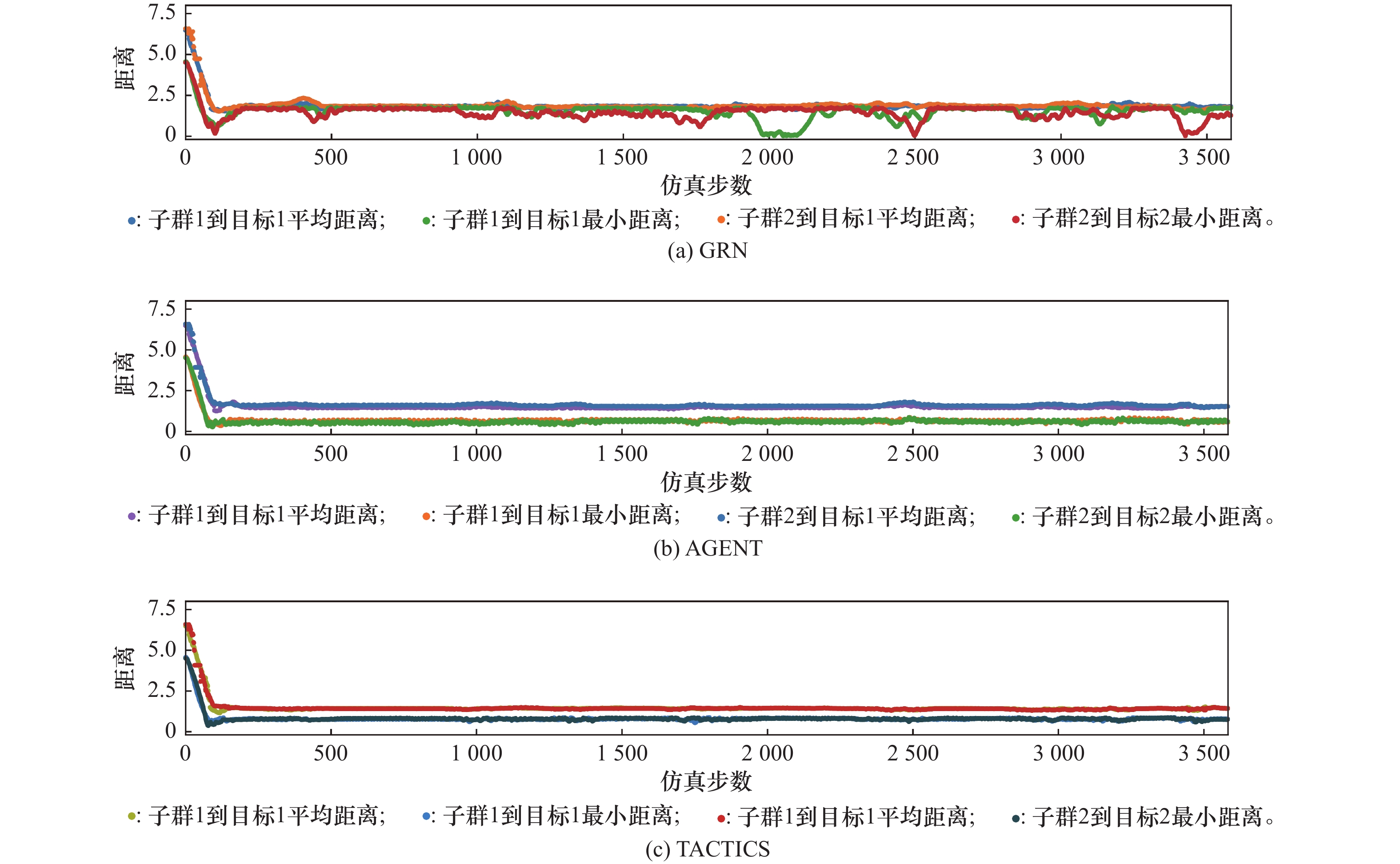

Fig.16
Distances of each drone to the two targets, and the countermeasure target selection made by the drones"
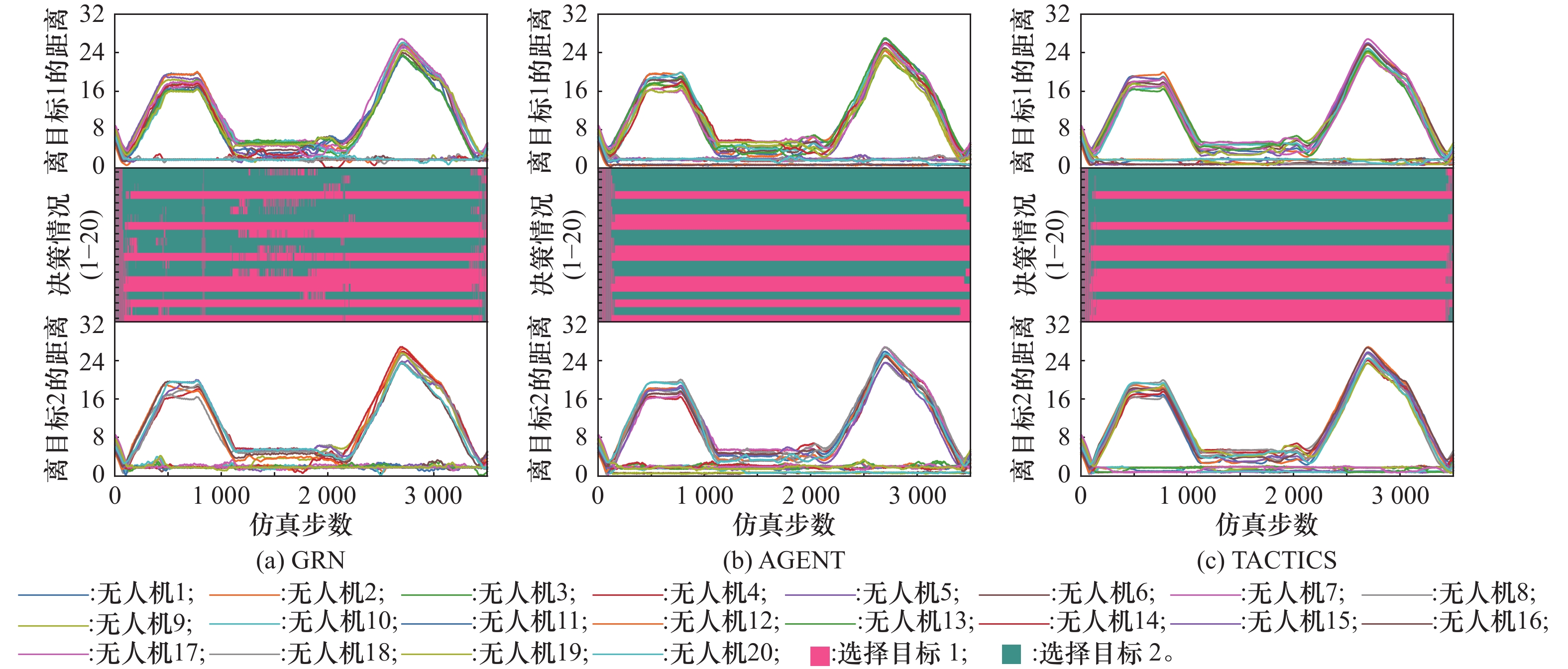
Fig.17
Velocity correlation between drones and their respective sub-swarms in two sub-swarms tracking and countering two targets"
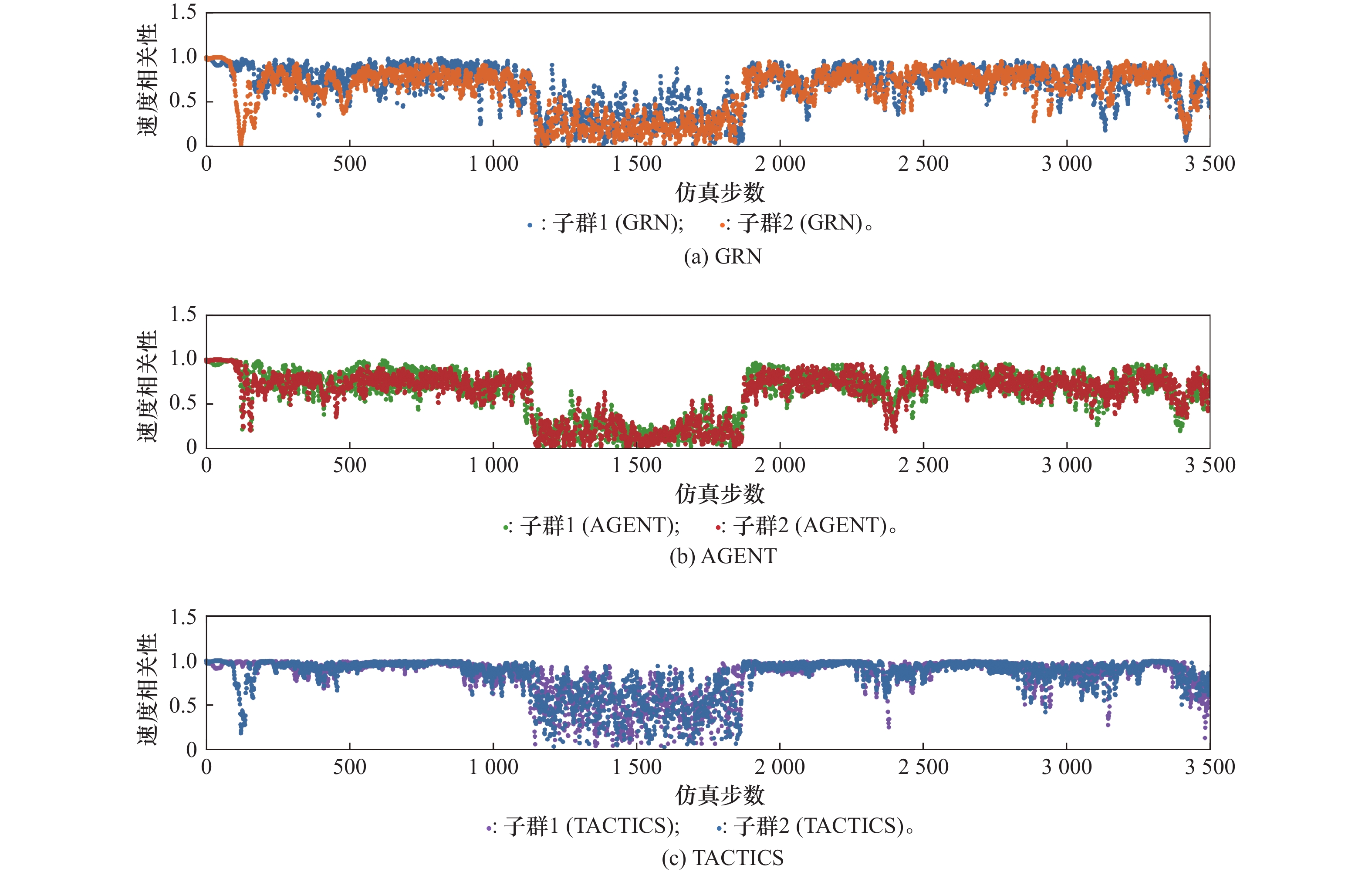
Fig.18
Average of the minimum distances from all drones to the threat zone, and the minimum of these minimum distances"
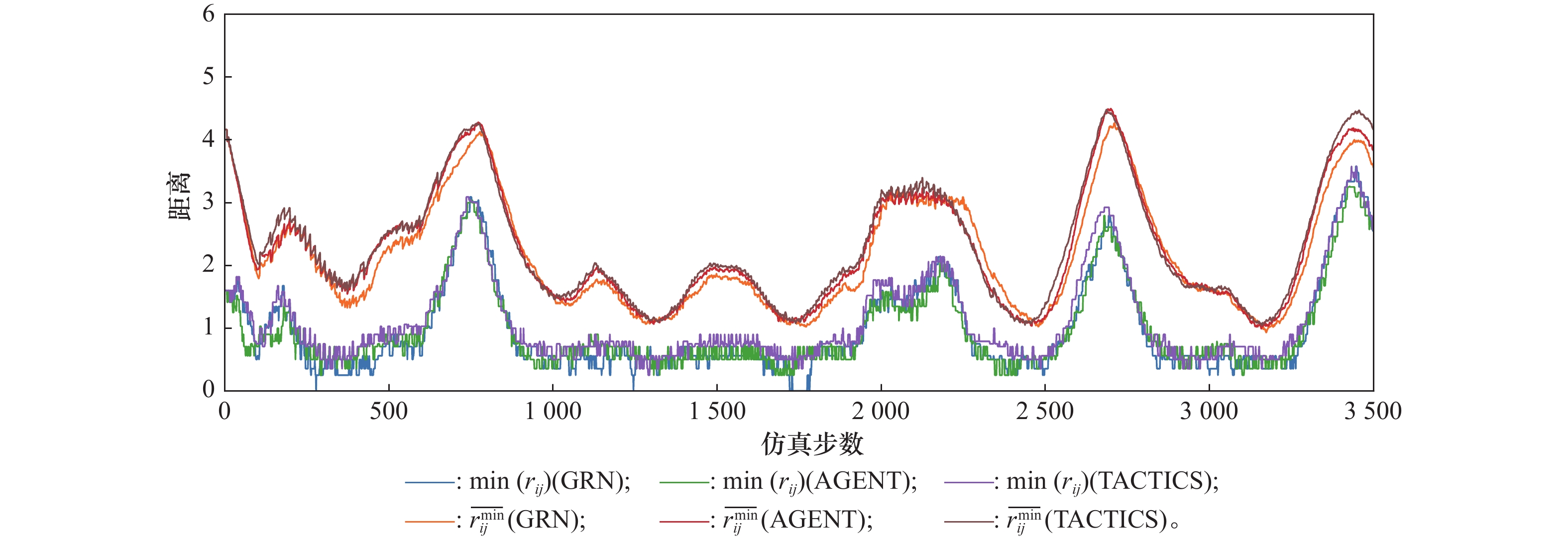
Fig.19
Velocity correlation of 20 drones at adjacent time intervals"
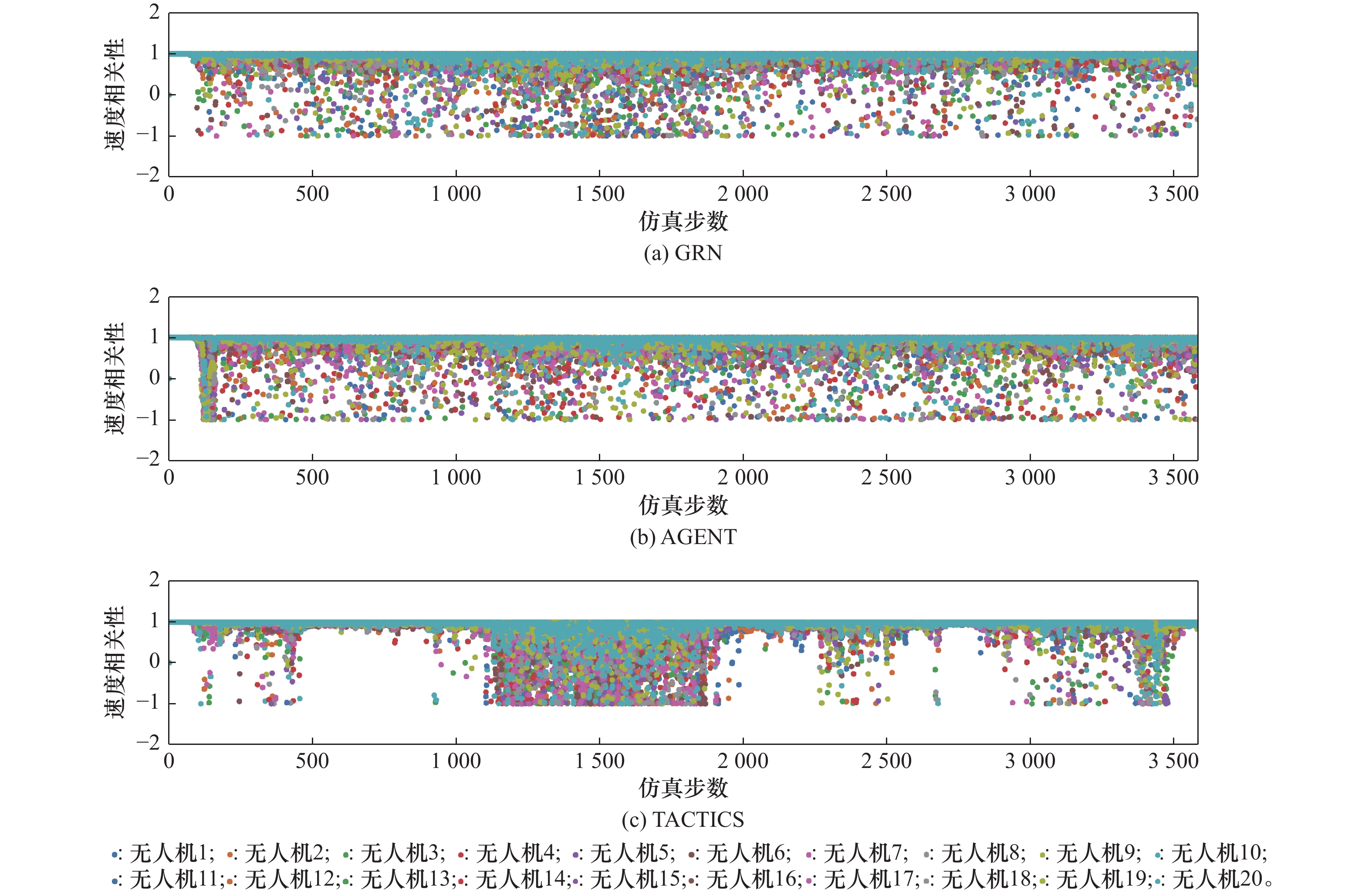
Table 1
Algorithm run time comparison"
| 指标 | GRN方法 | AGENT方法 | TACTICS方法 |
| 指标1 | × | — | √ |
| 指标2 | × | — | √ |
| 指标3 | × | √ | √ |
| 指标4 | × | √ | √ |
| 指标5 | × | — | √ |
| 指标6 | — | — | √ |
| 指标7 | × | — | √ |
| 指标8 | — | — | √ |
| 1 | KREPS S, LUSHENKO P. Drones in modern war: evolutionary, revolutionary, or both?[J]. Defense & Security Analysis, 2023, 39 (2): 271- 274. |
| 2 | PARK S H, NAMGUNG S P, KIM S K. A case study on the drone battle between Azerbaijan and Armenia[J]. International Journal of Advanced Culture Technology, 2023, 11 (3): 94- 98. |
| 3 | BURSUC A, MUNTEANU C, RUS S. Overview on sea drones evolution and their use in modern warfare[J]. Revista Academiei Fortelor Terestre, 2024, 29 (2): 195- 209. |
| 4 |
GONZALEZ R J. Death by remote control: drone warfare in Afghanistan, Ukraine and beyond[J]. Anthropology Today, 2024, 40 (1): 7- 11.
doi: 10.1111/1467-8322.12862 |
| 5 | CHAN P S. Drones for saving life: reimagining war technology[J]. Circulation: Cardiovascular Quality and Outcomes, 2024, 17 (4): e010908. |
| 6 | MAITRA S. How drones are changing war: cheaper technology means a return to offense dominance, which makes the whole world more volatile[J]. The American Conservative, 2024, 23 (1): 34- 39. |
| 7 | KUNERTOVA D. Learning from the Ukrainian battlefield: tomorrow’s drone warfare, today’s innovation challenge [EB/OL]. [2024-11-30]. http://dx.doi.org/10.3929/ethz-b-000690448. |
| 8 |
DEHEGANI A, MAIZI L. The impact of the digital military revolution on modern warfare: Russia’s war on Ukraine as a model[J]. Journal of Science and Knowledge Horizons, 2024, 4 (1): 280- 299.
doi: 10.34118/jskp.v4i01.3866 |
| 9 |
FAN Y, CHEN B, ZHAO Y, et al. Performance analysis of reconnaissance coverage for HUAV swarms under communication interference based on different architectures[J]. Electronics, 2024, 13 (20): 4067.
doi: 10.3390/electronics13204067 |
| 10 | GRIGORE L, CRISTESCU C. The use of drones in tactical military operations in the integrated and cybernetic battle field[J]. Land Forces Academy Review, 2024, 29 (2): 269−273. |
| 11 | KANU N J, GUPTA E, PENDKAR S M, et al. A few suggestions to improve anti-drone measures for combating against the drone menace[J]. Journal of The Institution of Engineers (India): Series C, 2024, 105 (3): 761- 787. |
| 12 | KIM J, CHOI J, KWON H. A study on the development directions of a smart counter-drone defense system based on the future technological environment[J]. KSII Transactions on Internet and Information Systems (TIIS), 2024, 18 (7): 1929- 1952. |
| 13 | LEE N I. A study on influencing factors to build a counter-drone system: focusing on national important facilities[J]. The Journal of the Convergence on Culture Technology, 2024, 10 (4): 483- 494. |
| 14 | CHO S K, JANG S, KIM S. A study on how to establish the counter-drone system for National crucial infrastructures[J]. International Journal of Advanced Culture Technology, 2024, 12 (4): 275- 284. |
| 15 |
KASHI R N, PRASHANTH A, KASHI S R, et al. A survey and analysis of drone detection systems using a systems approach superposed on scenarios[J]. Systems Engineering, 2024, 27 (3): 598- 636.
doi: 10.1002/sys.21735 |
| 16 | CHOI H, JOUNG K W. A study on the establishment of counter-drone system and the concept of integrated multi-domain defense[J]. International Journal of Advanced Culture Technology, 2024, 12 (4): 323- 334. |
| 17 |
KING A. Robot wars: autonomous drone swarms and the battlefield of the future[J]. Journal of Strategic Studies, 2024, 47 (2): 185- 213.
doi: 10.1080/01402390.2024.2302585 |
| 18 |
BU Y J, YAN Y, YANG Y N. Advancement challenges in UAV swarm formation control: a comprehensive review[J]. Drones, 2024, 8 (7): 320.
doi: 10.3390/drones8070320 |
| 19 |
HENG L W, ZHENG X, HONG D Z. Dynamic collision avoidance for cooperative fixed-wing UAV swarm based on normalized artificial potential field optimization[J]. Journal of Central South University, 2021, 28 (10): 3159- 3172.
doi: 10.1007/s11771-021-4840-5 |
| 20 |
WANG C, WANG D L, GU M Q, et al. Bioinspired environment exploration algorithm in swarm based on levy flight and improved artificial potential field[J]. Drones, 2022, 6 (5): 122.
doi: 10.3390/drones6050122 |
| 21 |
WANG X K, YU Y G, LI Z K. Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints[J]. International Journal of Robust and Nonlinear Control, 2021, 31 (6): 2110- 2125.
doi: 10.1002/rnc.5030 |
| 22 | BACHETI V P, BRANDÃO A S, SARCINELLI-FILHO M. Path-following with a UGV-UAV formation considering that the UAV lands on the UGV [C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2020: 488−497. |
| 23 |
XUE K, WU T Y. Distributed consensus of USVs under heterogeneous UAV-USV multi-agent systems cooperative control scheme[J]. Journal of Marine Science and Engineering, 2021, 9 (11): 1314.
doi: 10.3390/jmse9111314 |
| 24 | LOWE R, WU Y I, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments [C]// Proc. of the 31st International Conference on Neural Information Processing Systems, 2017: 6382−6393. |
| 25 |
ERGUN S. Resource allocation optimization for effective vehicle network communications using multi-agent deep reinforcement learning[J]. Journal of Dynamics and Games, 2025, 12 (2): 134- 156.
doi: 10.3934/jdg.2024017 |
| 26 | LIU B, LI X, ZHENG T C, et al. Research on multi UAV attack defense confrontation algorithm based on machine learning[J]. Academic Journal of Computing & Information Science, 2021, 4 (3): 52- 59. |
| 27 |
ZHOU X, WEN X Y, WANG Z P, et al. Swarm of micro flying robots in the wild[J]. Science Robotics, 2022, 7 (66): eabm5954.
doi: 10.1126/scirobotics.abm5954 |
| 28 |
JIN Y C, GUO H L, MENG Y. A hierarchical gene regulatory network for adaptive multirobot pattern formation[J]. IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42 (3): 805- 816.
doi: 10.1109/TSMCB.2011.2178021 |
| 29 |
WANG C, KUANG W X, GU M Q, et al. AGENT: an adaptive grouping and entrapping method for flocking systems[J]. Journal of Computational Design and Engineering, 2023, 10 (1): 357- 367.
doi: 10.1093/jcde/qwac136 |
| 30 | OH H, JIN Y C. Evolving hierarchical gene regulatory networks for morphogenetic pattern formation of swarm robots [C]//Proc. of the IEEE Congress on Evolutionary Computation, 2014: 776−783. |
| 31 |
VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3 (20): eaat3536.
doi: 10.1126/scirobotics.aat3536 |
| 32 |
SUN G B, ZHOU R, MA Z, et al. Mean-shift exploration in shape assembly of robot swarms[J]. Nature Communications, 2023, 14 (1): 3476.
doi: 10.1038/s41467-023-39251-5 |
| 33 | 王琛. 12架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1ujsSekENd. |
| WANG C. Twelve drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1ujsSekENd. | |
| 34 | 王琛. 16架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1ujsSekEYm. |
| WANG C. Sixteen drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1ujsSekEYm. | |
| 35 | 王琛. 20架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6T. |
| WANG C. Twenty drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1MjsSekE6T. | |
| 36 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(GRN方法)[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6w. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (GRN method). [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6w. | |
| 37 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(AGENT方法)[EB/OL]. [2024-11-30]. https:// www.bilibili.com/video/BV1NssSeTEEX. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (AGENT method). [EB/OL]. [2024-11-30]. https://www. bilibili.com/video/BV1NssSeTEEX. | |
| 38 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(TACTICS方法)[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE4N. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (TACTICS method)[EB/OL]. [2024-11-30]. https://www. bilibili.com/video/BV1MjsSekE4N. |
| [1] | Fangjie GUO, Jing LI, Zhaohui ZHANG. Predefined-time lag consensus for MAS with input delay [J]. Systems Engineering and Electronics, 2025, 47(9): 3041-3046. |
| [2] | Ziyi WANG, Xiongjun FU, Jian DONG, Cheng FENG. Optimization of radar collaborative anti-jamming strategies based on hierarchical multi-agent reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(4): 1108-1114. |
| [3] | Jiale LI, Qilin ZHONG, Jie XIAO, Guofei LI. Adaptive fixed-time formation control for multi-agent system [J]. Systems Engineering and Electronics, 2025, 47(2): 600-607. |
| [4] | Weimin IU, Yongyue WANG, Xinyang MA, Jinkun LIU. Consensus control for input-delay multi-agent system with input constraint [J]. Systems Engineering and Electronics, 2024, 46(9): 3176-3184. |
| [5] | Jie ZHANG, Kairong LIU, Jinbao CHEN, Yingxue ZHANG, Chuanzhi CHEN, Hongzhi YU, Yunxiao ZHANG. Multi-agents formation control method based on space confrontation [J]. Systems Engineering and Electronics, 2024, 46(6): 2082-2091. |
| [6] | Guhao SUN, Zhongze CAI, Qingshuang ZENG. Fixed-time distributed tracking and control of multi-agent formation weighted centroid [J]. Systems Engineering and Electronics, 2024, 46(12): 4165-4172. |
| [7] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults [J]. Systems Engineering and Electronics, 2022, 44(4): 1220-1229. |
| [8] | Zhe LUO, Wanzhen QUAN, Purui ZHANG, Xiaogang YANG. Consensus tracking control for one-side Lipschitz nonlinear multi-agent systems [J]. Systems Engineering and Electronics, 2022, 44(1): 279-284. |
| [9] | Jiayi LIU, Shaohua YUE, Gang WANG, Xiaoqiang YAO, Jie ZHANG. Cooperative evolution algorithm of multi-agent system under complex tasks [J]. Systems Engineering and Electronics, 2021, 43(4): 991-1002. |
| [10] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed adaptive cooperative tracking control of multi-agent system with weak communication [J]. Systems Engineering and Electronics, 2021, 43(2): 487-498. |
| [11] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [12] | Jiayi LIU, Gang WANG, Jie ZHANG, Chuang WANG, Xituan SONG. Target optimal assignment model based on improved AGD-distributed multi-Agent system [J]. Systems Engineering and Electronics, 2020, 42(4): 863-870. |
| [13] | ZHOU Jian, GONG Chunlin, GU Liangxian, SU Hua. Distributed synchronization of leader-follower systems with unmatched uncertainties [J]. Systems Engineering and Electronics, 2019, 41(3): 636-642. |
| [14] | CHEN Wu, FAN Mingkai, LI Zehong, JIN Xin, HONG Liang. Design of network robustness for drone swarm system [J]. Systems Engineering and Electronics, 2019, 41(11): 2633-2640. |
| [15] | NI Peng1,2, LIU Jinmang1, FU Qiang1, GAO Jiale1. #br# Research on layered decisionmaking of multisensor planning based onheterogeneous MAS in antiTBM combat [J]. Systems Engineering and Electronics, 2016, 38(8): 1816-1825. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||