Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (2): 621-632.doi: 10.12305/j.issn.1001-506X.2025.02.28
• Guidance, Navigation and Control • Previous Articles
Robust trajectory planning for ship collision avoidance based on polynomial chaotic expansion
Xinyu QI, Zhi ZHANG, Xiaobing SHANG, Yiqiong ZHANG, Lichao JIANG, Yuexin ZHOU
- School of Intelligent Science and Engineering, Harbin Engineering University, Harbin 150001, China
-
Received:2024-02-20Online:2025-02-25Published:2025-03-18 -
Contact:Zhi ZHANG
CLC Number:
Cite this article
Xinyu QI, Zhi ZHANG, Xiaobing SHANG, Yiqiong ZHANG, Lichao JIANG, Yuexin ZHOU. Robust trajectory planning for ship collision avoidance based on polynomial chaotic expansion[J]. Systems Engineering and Electronics, 2025, 47(2): 621-632.
share this article

Fig.1
Ships' three degree of freedom model"

Table 1
Uncertain parameters"
| 参数 | 均值 | 方差 |
| Xu | -0.047 644 | 0.005 |
| Yv | -0.145 3 | 0.020 |
| Yr | 0.366 66 | 0.020 |
| Nv | -0.161 65 | 0.020 |

Fig.2
Algorithm's flowchart"

Table 2
Ship encounter situations"
| 会遇态势 | 船舶 | 初始横坐标/m | 初始纵坐标/m | 初始速度/(m/s) | 初始艏向/rad |
| 对遇 | 本船 | 0 | 0 | 7 | 2π |
| 来船 | 0 | 350 | 7 | $-\frac{1}{2} \mathsf{π} $ | |
| 小角度右舷交叉 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 50 | 210 | 7 | $-\frac{2}{3}\mathsf{π} $ | |
| 大角度右舷交叉 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 160 | 80 | 7 | π | |
| 追越 | 本船 | 0 | 0 | 7 | $\frac{1}{2}\mathsf{π} $ |
| 来船 | 0 | 80 | 7 | $\frac{1}{2}\mathsf{π} $ |
Table 3
Simulation experiment parameters"
| 参数名称 | 取值 |
| a1 | 0.9 |
| a2 | 0.1 |
| kg | 3 |
| δmax/rad | 0.2π |
| Ψmin/rad | $-\frac{1}{3}\mathsf{π} $ |
| Ψmax/rad | $\frac{1}{3}\mathsf{π} $ |
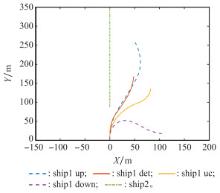
Fig.3
Collision avoidance trajectory for encountering ships"

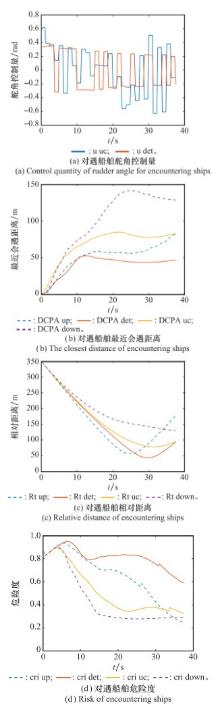
Fig.4
Quantity of collision avoidance status for encountering ships"


Fig.5
Collision avoidance trajectory for small angle starboard crossing ships"

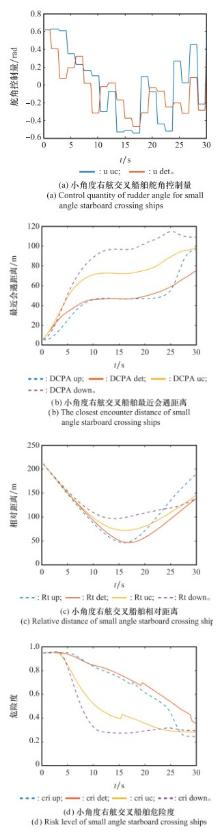
Fig.6
Quantity of collision avoidance status for small angle starboard crossing ships"


Fig.7
Collision avoidance trajectory for large angle starboard crossing ships"


Fig.8
Quantity of collision avoidance status for large angle starboard crossing ships"

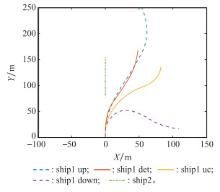
Fig.9
Collision avoidance trajectory for overtaking ships"

Fig.10
Quantity of collision avoidance status for overtaking ships"

Table 4
Evaluation indicators for collision avoidance"
| 指标 | 方法 | 对遇 | 小角度 右舷交叉 | 大角度 右舷交叉 | 追越 |
| RTmin/m | 确定性 | 43.5 | 46.8 | 34.0 | 33.4 |
| 鲁棒优化 | 77.9 | 72.2 | 37.1 | 42.2 | |
| DCPAmax/m | 确定性 | 52.6 | 75.6 | 62.2 | 46.4 |
| 鲁棒优化 | 84.9 | 98.1 | 67.3 | 83.9 | |
| 确定性 | 0.81 | 0.74 | 0.71 | 0.82 | |
| 鲁棒优化 | 0.52 | 0.51 | 0.61 | 0.70 |
| 1 | LI X P , ZHAO X Y , BAI D L . Marine transport efficiency evaluation of cross-border logistics based on AHP-TOPSIS method[J]. Journal of Coastal Research, 2020, 110 (SI): 95- 99. |
| 2 |
LIU R Z , WANG T , LI J D , et al. Simulation of seasonal transport of microplastics and influencing factors in the China Seas based on the ROMS model[J]. Water Research, 2023, 244, 120493.
doi: 10.1016/j.watres.2023.120493 |
| 3 |
HUANG Y , COLIN C , LIU Z F , et al. Impacts of nepheloid layers and mineralogical compositions of oceanic margin sediments on REE concentrations and Nd isotopic compositions of seawater[J]. Geochimica et Cosmochimica Acta, 2023, 359, 57- 70.
doi: 10.1016/j.gca.2023.08.026 |
| 4 |
LIANG X Y , WANG L Z , DU W , et al. Emission factors of oxygenated polycyclic aromatic hydrocarbons from ships in China[J]. Environmental Pollution, 2023, 337, 122483.
doi: 10.1016/j.envpol.2023.122483 |
| 5 | LI L L, WANG J K. SAR image ship detection based on ant co-lony optimization[C]//Proc. of the 5th International Congress on Image and Signal Processing, 2012: 1100-1103. |
| 6 |
夏悠然, 管军, 易文俊. 基于改进粒子群优化极限学习机的弹丸参数辨识[J]. 系统工程与电子技术, 2023, 45 (2): 521- 529.
doi: 10.12305/j.issn.1001-506X.2023.02.24 |
|
XIA Y R , GUAN J , YI W J . Projectile parameter identification: extreme learning machine optimized by improved particle swarm[J]. Systems Engineering and Electronics, 2023, 45 (2): 521- 529.
doi: 10.12305/j.issn.1001-506X.2023.02.24 |
|
| 7 | CHEN Y Q, LI T X. Collision avoidance of unmanned ships based on artificial potential field[C]//Proc. of the Chinese Automation Congress, 2017: 4437-4440. |
| 8 | REN L , ZHANG W X . Matching optimization of ship engine and propeller based on PSO-GA algorithm[J]. Applied Mechanics and Materials, 2012, 121, 4503- 4507. |
| 9 | CHEN X J, LIU Y X, HONG X B, et al. Unmanned ship path planning based on RRT[C]//Proc. of the International Conference on Intelligent Computing, 2018. |
| 10 | 杨荣武, 许劲松, 王鑫. 船舶自主避碰的慎思型轨迹规划[J]. 上海交通大学学报, 2019, 53 (12): 1411- 1419. |
| YANG R W , XU J S , WANG X . Deliberative trajectory planning for autonomous collision avoidance of ships[J]. Journal of Shanghai Jiao Tong University, 2019, 53 (12): 1411- 1419. | |
| 11 | 徐杨, 陆丽萍, 褚端峰, 等. 无人车辆轨迹规划与跟踪控制的统一建模方法[J]. 自动化学报, 2019, 45 (4): 799- 807. |
| XU Y , LU L P , CHU D F , et al. An unified modeling method for trajectory planning and tracking control of unmanned vehicles[J]. Journal of Automation, 2019, 45 (4): 799- 807. | |
| 12 | 姚绪梁, 王峰, 王景芳, 等. 不确定海流环境下水下机器人最优时间路径规划[J]. 控制理论与应用, 2020, 37 (6): 1302- 1310. |
| YAO X L , WANG F , WANG J F , et al. Optimal time path planning for underwater robots in uncertain ocean current environments[J]. Control Theory & Applications, 2020, 37 (6): 1302- 1310. | |
| 13 |
汪萌, 诸兵. 不确定性建模在2D和3D目标检测中的应用[J]. 系统工程与电子技术, 2023, 45 (8): 2370- 2376.
doi: 10.12305/j.issn.1001-506X.2023.08.10 |
|
WANG M , CHU B . Application of uncertainty modeling in 2D and 3D object detection[J]. Systems Engineering and Electro-nics, 2023, 45 (8): 2370- 2376.
doi: 10.12305/j.issn.1001-506X.2023.08.10 |
|
| 14 |
CHAUDHURI A , WAYCASTER G , PRICE N , et al. NASA uncertainty quantification challenge: an optimization-based methodology and validation[J]. Journal of Aerospace Information Systems, 2015, 12 (1): 10- 34.
doi: 10.2514/1.I010269 |
| 15 |
GHANEM R , YADEGARAN I , THIMMISETTY C , et al. Pro-babilistic approach to NASA Langley research center multidisciplinary uncertainty quantification challenge problem[J]. Journal of Aerospace Information Systems, 2015, 12 (1): 170- 188.
doi: 10.2514/1.I010271 |
| 16 |
BAI Y L , HUANG Z Y , LAM H . Model calibration via distributionally robust optimization: on the NASA Langley uncertainty quantification challenge[J]. Mechanical Systems and Signal Processing, 2022, 164, 108211.
doi: 10.1016/j.ymssp.2021.108211 |
| 17 |
SEPKA S A , WRIGHT M . Monte Carlo approach to FIAT uncertainties with applications for Mars science laboratory[J]. Journal of Thermophysics and Heat Transfer, 2011, 25 (4): 516- 522.
doi: 10.2514/1.49804 |
| 18 | HALDER A . Probabilistic methods for model validation[M]. College Station, Texas: Texas A&M University, 2014. |
| 19 | FEISCHL M , SCAGLIONI A . Convergence of adaptive stochastic collocation with finite elements[J]. Computers & Mathematics with Applications, 2021, 98, 139- 156. |
| 20 |
ZENG P , LI T B , CHEN Y , et al. New collocation method for stochastic response surface reliability analyses[J]. Engineering with Computers, 2020, 36, 1751- 1762.
doi: 10.1007/s00366-019-00793-2 |
| 21 |
JIA B , XIN M . Short-arc orbital uncertainty propagation with arbitrary polynomial chaos and admissible region[J]. Journal of Guidance, Control, and Dynamics, 2020, 43 (4): 715- 728.
doi: 10.2514/1.G004548 |
| 22 | WANG M J, HUANG Q B, LI S D. A subinterval response surface method for frequency response analysis of structural-acoustic system with uncertain-but-bounded parameters[C]//Proc. of the 4th International Conference on Industrial Engineering and Applications, 2017: 327-330. |
| 23 |
LUO Y Z , YANG Z . A review of uncertainty propagation in orbital mechanics[J]. Progress in Aerospace Sciences, 2017, 89, 23- 39.
doi: 10.1016/j.paerosci.2016.12.002 |
| 24 |
YIN S W , YU D J , LUO Z , et al. An arbitrary polynomial chaos expansion approach for response analysis of acoustic systems with epistemic uncertainty[J]. Computer Methods in Applied Mechanics and Engineering, 2018, 332, 280- 302.
doi: 10.1016/j.cma.2017.12.025 |
| 25 |
VITTALDEV V , RUSSELL R P , LINARES R . Spacecraft uncertainty propagation using Gaussian mixture models and polynomial chaos expansions[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (12): 2615- 2626.
doi: 10.2514/1.G001571 |
| 26 |
HOSDER S , WALTERS R W , BALCH M . Point-collocation nonintrusive polynomial chaos method for stochastic computational fluid dynamics[J]. AIAA Journal, 2010, 48 (12): 2721- 2730.
doi: 10.2514/1.39389 |
| 27 | 谢朔. 基于天牛须优化的船舶运动建模与避碰方法研究[D]. 武汉: 武汉理工大学, 2022. |
| XIE S. Research on ship motion modeling and collision avoidance methods based on optimization of longhorn whiskers[D]. Wuhan: Wuhan University of Technology, 2022. | |
| 28 |
郑中义, 吴兆麟. 船舶碰撞危险度的新模型[J]. 大连海事大学学报, 2002, 28 (2): 1- 5.
doi: 10.3969/j.issn.1006-7736.2002.02.001 |
|
ZHENG Z Y , WU Z L . A new model of ship collision risk[J]. Dalian Maritime University Journal, 2002, 28 (2): 1- 5.
doi: 10.3969/j.issn.1006-7736.2002.02.001 |
|
| 29 | VARELA J M , GUEDES SOARES C . Geometry and visual realism of ship models for digital ship bridge simulators[J]. Journal of Engineering for the Maritime Environment, 2017, 231 (1): 329- 341. |
| 30 | CHEN L Y , HUANG Y M , ZHENG H R , et al. Cooperative multi-vessel systems in urban waterway networks[J]. IEEE Trans.on Intelligent Transportation Systems, 2019, 21 (8): 3294- 3307. |
| 31 |
GAO H , ZOU Z J , XIA L , et al. Application of the NIPC-based uncertainty quantification in prediction of ship maneuverability[J]. Journal of Marine Science and Technology, 2021, 26, 555- 572.
doi: 10.1007/s00773-020-00754-1 |
| 32 |
KIM H J , KIM Y T , YOON D K . Dependence of polynomial chaos on random types of forces of KdV equations[J]. Applied Mathematical Modelling, 2012, 36 (7): 3080- 3093.
doi: 10.1016/j.apm.2011.09.086 |
| [1] | Haonan WU, Wei HAN, Zishuang PAN, Fang GUO, Xichao SU. Multi-layer coding genetic algorithm-based approach to force action planning for carrier aircraft fleets [J]. Systems Engineering and Electronics, 2025, 47(2): 555-567. |
| [2] | Peiqi WANG, Rusheng JU, Miao ZHANG, Wei DUAN. Data collection strategy of HLA simulation system based on non-dominated genetic algorithm [J]. Systems Engineering and Electronics, 2024, 46(9): 3103-3111. |
| [3] | Xin XI, Gaogao LIU, Qiang LIU, Dongjie HUANG. Distributed jamming optimal array method for sidelobe cancellation [J]. Systems Engineering and Electronics, 2024, 46(8): 2623-2628. |
| [4] | Qiangqiang XU, Hua CHAI. Optimization of task dispatch plan for vehicular optical observation equipment based on NSGA-Ⅱ [J]. Systems Engineering and Electronics, 2024, 46(7): 2393-2400. |
| [5] | Yangyang LI, Junren LUO, Wanpeng ZHANG, Fengtao XIANG. Genetic-evolutionary bi-level mission planning algorithm for multi-satellite cooperative observation [J]. Systems Engineering and Electronics, 2024, 46(6): 2044-2053. |
| [6] | Yiming CAI, Li MA, Hengyang LU, Wie FANG. Full process parallel genetic algorithm for Bayesian network structure learning [J]. Systems Engineering and Electronics, 2024, 46(5): 1703-1711. |
| [7] | Zekun YAO, Chao WANG, Qingzhan SHI, Shaoqing ZHANG, Naichang YUAN. Cooperative jamming resource allocation model for radar network based on improved discrete simulated annealing genetic algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 824-830. |
| [8] | Shuai YIN, Jianhui YU, Bin SONG, Yanning GUO, Chuanjiang LI, Yueyong LYU. GEO target servicing mission scheduling based on multi-group chaotic genetic algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 914-921. |
| [9] | Guixiang ZHAO, Chenxu WANG, Jian ZHOU, Yunmiao LI. Collision risk calculation of unmanned surface vehicle based on improved fuzzy evaluation method [J]. Systems Engineering and Electronics, 2024, 46(3): 1031-1037. |
| [10] | Yuting ZHANG, Jingyu YANG. Capability-based defense resource allocation method [J]. Systems Engineering and Electronics, 2024, 46(2): 599-604. |
| [11] | Kai QIN, Shushi GU, Zhikai ZHANG, Yu WANG, Qian LIU, Chen ZHAO, Qinyu ZHANG. Communication tower deployment scheme for lunar surface multi-device communication networks [J]. Systems Engineering and Electronics, 2024, 46(2): 729-739. |
| [12] | Changwei MA, Yaping WANG, Yu ZHANG, Cancan HU. Capability planning method for equipment system of systems based on dynamic replenishment of resources [J]. Systems Engineering and Electronics, 2024, 46(12): 4108-4115. |
| [13] | Yue RAO, Jian YANG, Guomin SUN, Wei ZHANG, Huaizong SHAO, Jingran LIN. Multi-beam satellite dynamic resource allocation method based on improved SA-NSGAⅡ [J]. Systems Engineering and Electronics, 2024, 46(12): 4222-4230. |
| [14] | Enhui WU, Jing LIU, Xu YANG. Minimum orbital intersection distance based space index [J]. Systems Engineering and Electronics, 2024, 46(11): 3784-3791. |
| [15] | Zhiqiang CAO, Jia ZHANG, Bin XIN. UAV search coverage planning under intermittent information transmission condition [J]. Systems Engineering and Electronics, 2024, 46(1): 152-161. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||