Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (11): 3862-3873.doi: 10.12305/j.issn.1001-506X.2024.11.28
• Guidance, Navigation and Control • Previous Articles Next Articles
Optimization and design of virtual tube based on elastic area characteristics
Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG
- School of Electrical Engineering, Xinjiang University, Urumqi 830017, China
-
Received:2023-11-21Online:2024-10-28Published:2024-11-30 -
Contact:Xinkai LI
CLC Number:
Cite this article
Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG. Optimization and design of virtual tube based on elastic area characteristics[J]. Systems Engineering and Electronics, 2024, 46(11): 3862-3873.
share this article

Fig.1
Basic elastic area virtual tube parameter diagram"


Fig.2
Elastic area virtual tube self-cross phenomenon"


Fig.3
Elastic area virtual tube planned in the obstruction-dense environment"


Fig.4
Three-dimensional child node distribution diagram"


Fig.5
Child node non-cross-layer selection diagram"

Table 1
Child node selection rules in three-dimensional space"
| 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | 可选取子节点位置 | 不存在障碍物位置 | |||
| 1 | 1, 2, 8 | 8 | 8 | 15 | 6, 9, 15 | 22 | 4, 18, 22 | |||
| 2 | 2 | 9 | 9 | 16 | 6, 7, 8, 9, 15, 16, 17 | 23 | 4, 5, 6, 18, 22, 23, 24 | |||
| 3 | 2, 3, 4 | 10 | 1, 2, 8, 9, 10, 11, 17 | 17 | 8, 9, 17 | 24 | 6, 18, 24 | |||
| 4 | 4 | 11 | 2, 9, 11 | 18 | 18 | 25 | 6, 7, 8, 18, 24, 25, 26 | |||
| 5 | 4, 5, 6 | 12 | 2, 3, 4, 9, 11, 12, 13 | 19 | 2, 3, 4, 18, 19, 20, 26 | 26 | 8, 18, 26 | |||
| 6 | 6 | 13 | 4, 9, 13 | 20 | 2, 18, 20 | - | - | |||
| 7 | 6, 7, 8 | 14 | 4, 5, 6, 9, 13, 14, 15 | 21 | 2, 3, 4, 18, 20, 21, 22 | - | - |

Fig.6
Elastic area virtual tube planned in narrow spaces"
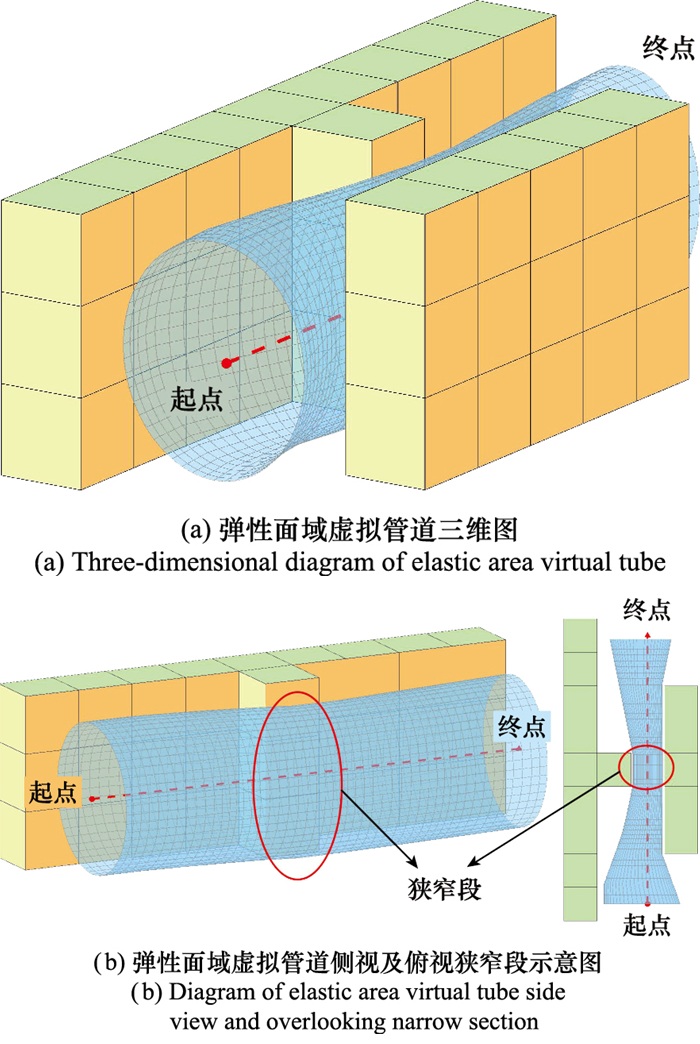

Fig.7
Inelastic area virtual tube planned in narrow spaces"


Fig.8
Comparison diagram of feasible region size in narrow section"

Table 2
Three-dimensional virtual tube cross-sectional area comparison"
| 虚拟管道类型 | 相对生成线的横截面位置 | |||||
| 起点 | 1/10 | 2/10 | 3/10 | 4/10 | 5/10 | |
| 非弹性面域虚拟管道 | 4.08 | 3.35 | 1.59 | 1.10 | 0.77 | 0.61 |
| 弹性面域虚拟管道 | 4.66 | 4.22 | 2.91 | 2.42 | 2.02 | 1.81 |
| 虚拟管道类型 | 相对生成线的横截面位置 | |||||
| 6/10 | 7/10 | 8/10 | 9/10 | 终点 | ||
| 非弹性面域虚拟管道 | 0.66 | 0.94 | 1.20 | 1.80 | 2.66 | |
| 弹性面域虚拟管道 | 1.87 | 2.23 | 2.53 | 3.09 | 3.76 | |

Fig.9
Comparison of inelastic area virtual tube before and after the improved A* algorithm"


Fig.10
Comparison of elastic area virtual tube before and after the improved A* algorithm"

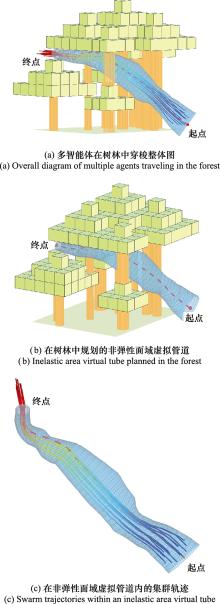
Fig.11
Schematic diagram of multiple agents shuttling in inelastic area virtual tube"


Fig.12
Schematic diagram of multiple agents shuttling in elastic area virtual tube"

Table 3
Comparison of multiple intelligences in the forest environment"
| 虚拟管道类型 | 运行时间/s | ||||||||||
| Tr=7.14 | Tr=7.35 | Tr=7.56 | |||||||||
| Dd/m | Ds/m | Ar/% | Dd/m | Ds/m | Ar/% | Dd/m | Ds/m | Ar/% | |||
| 非弹性面域虚拟管道 | 0.14 | 0.27 | 50.0 | 0.14 | 0.27 | 92.8 | 0.14 | 0.27 | 100 | ||
| 弹性面域虚拟管道 | 0.14 | 0.27 | 64.3 | 0.14 | 0.27 | 100 | 0.14 | 0.27 | 100 | ||
| 1 |
胡鹏林, 潘泉, 郭亚宁, 等. 多智能体编队控制中的迁移强化学习算法研究[J]. 西北工业大学学报, 2023, 41 (2): 389- 399.
doi: 10.3969/j.issn.1000-2758.2023.02.017 |
|
HU P L , PAN Q , GUO Y N , et al. Study on learning algorithm of transfer reinforcement for multi-agent formation control[J]. Journal of Northwestern Polytechnical University, 2023, 41 (2): 389- 399.
doi: 10.3969/j.issn.1000-2758.2023.02.017 |
|
| 2 | 张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42 (1): 141- 150. |
| ZHANG C S , WANG J , ZHANG L , et al. A multi-agent system flocking model with obstacle avoidance in complex obstacle field[J]. Acta Armamentarii, 2021, 42 (1): 141- 150. | |
| 3 |
MADRIDANO A , AL-KAFF A , MARTÍN D , et al. Trajectory planning for multi-robot systems: methods and applications[J]. Expert Systems with Applications, 2021, 173, 114660.
doi: 10.1016/j.eswa.2021.114660 |
| 4 |
YANG Y H , XIONG X Z , YAN Y H . UAV formation trajec-toryplanning algorithms: a review[J]. Drones, 2023, 7 (1): 62.
doi: 10.3390/drones7010062 |
| 5 | GUO S, LIU B, ZhANG S, et al. Continuous-time Gaussian process trajectory generation for multi-robot formation via probabilistic inference[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 9247-9253. |
| 6 |
JING S C , ZHAO X M , HUI F , et al. Cooperative CAVs optimal trajectory planning for collision avoidance and merging in the weaving section[J]. Transportmetrica B: Transport Dynamics, 2021, 9 (1): 219- 236.
doi: 10.1080/21680566.2020.1845852 |
| 7 |
JACKSON B E , HOWELL T A , SHAH K , et al. Scalable cooperative transport of cable-suspended loads with UAVs using distributed trajectory optimization[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 3368- 3374.
doi: 10.1109/LRA.2020.2975956 |
| 8 | QUAN Q , FU R , LI M X , et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Trans.on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 9 | PARK J, KIM J, JANG I, et al. Efficient multi-agent trajectory planning with feasibility guarantee using relative bernstein polynomial[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020: 434-440. |
| 10 | SHI G Y , HÖNIG W , SHI X C , et al. Neural-swarm2: planning and control of heterogeneous multirotor swarms using learned interactions[J]. IEEE Trans.on Robotics, 2021, 38 (2): 1063- 1079. |
| 11 | 郭宏达, 娄静涛, 杨珍珍, 等. 基于拍卖多智能体深度确定性策略梯度的多无人车分散策略研究[J]. 电子与信息学报, 2024, 46 (1): 287- 298. |
| GUO H D , LOU J T , YANG Z Z , et al. Research on dispersion strategy for multiple unmanned ground vehicles based on auction multi-agent deep deterministic policy gradient[J]. Journal of Electronics & Information Technology, 2024, 46 (1): 287- 298. | |
| 12 | DONG Z L, LIU C H. Collaborative coverage path planning of UAV cluster based on deep reinforcement learning[C]//Proc. of the IEEE 3rd International Conference on Frontiers Technology of Information and Computer, 2021: 201-207. |
| 13 |
LI J , CAO S , LIU X J , et al. Trans-UTPA: PSO and MADDPG based multi-UAVs trajectory planning algorithm for emergency communication[J]. Frontiers in Neurorobotics, 2023, 16, 1076338.
doi: 10.3389/fnbot.2022.1076338 |
| 14 | 刘卫国, 项志宇, 刘伟平, 等. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45 (9): 1637- 1645. |
| LIU W G , XIANG Z Y , LIU W P , et al. Research on vehicle control algorithm based on distributed reinforcement learning[J]. Aulomotive Engineering, 2023, 45 (9): 1637- 1645. | |
| 15 |
DORIGO M , THERAULAZ G , TRIANNI V . Swarm robotics: past, present, and future[point of view][J]. Proceedings of the IEEE, 2021, 109 (7): 1152- 1165.
doi: 10.1109/JPROC.2021.3072740 |
| 16 |
GUL F , MIR A , MIR I , et al. A centralized strategy for multi-agent exploration[J]. IEEE Access, 2022, 10, 126871- 126884.
doi: 10.1109/ACCESS.2022.3218653 |
| 17 |
ZHENG D , ZHANG Y F , LI F , et al. UAVs cooperative task assignment and trajectory optimization with safety and time constraints[J]. Defence Technology, 2023, 20, 149- 161.
doi: 10.1016/j.dt.2022.01.011 |
| 18 |
LIN S W , LIU A , WANG J G , et al. A review of path-planning approaches for multiple mobile robots[J]. Machines, 2022, 10 (9): 773.
doi: 10.3390/machines10090773 |
| 19 |
QUAN L , YIN L J , ZHANG T R , et al. Robust and efficient trajectory planning for formation flight in dense environments[J]. IEEE Trans.on Robotics, 2023, 39 (6): 4785- 4804.
doi: 10.1109/TRO.2023.3301295 |
| 20 |
尹洋, 杨全顺, 王征, 等. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44 (12): 3821- 3828.
doi: 10.12305/j.issn.1001-506X.2022.12.27 |
|
YIN Y , YANG Q S , WANG Z , et al. USV cluster coverage search method with communication distance constraint[J]. Systems Engineering and Electronics, 2022, 44 (12): 3821- 3828.
doi: 10.12305/j.issn.1001-506X.2022.12.27 |
|
| 21 |
LIU S , WATTERSON M , MOHTA K , et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 22 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model[C]//Proc. of the IEEE/ RSJ International Conference on Intelligent Robots and Systems, 2022: 4498-4504. |
| 23 | GAO Y , BAI C G , QUAN Q . Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube[J]. IEEE Trans.on Control of Network Systems, 2022, 2 (10): 693- 705. |
| 24 |
QUAN Q , GAO Y , BAI C G . Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 25 |
LIU L S , WANG B , XU H . Research on path-planning algorithm integrating optimization a-star algorithm and artificial potential field method[J]. Electronics, 2022, 11 (22): 3660.
doi: 10.3390/electronics11223660 |
| 26 | O'NEILL B . Elementary differential geometry[M]. 2nd ed London: Elsevier, 2006. |
| 27 | BILICI M , KOSEOGLU G . Tubular involutive surfaces with frenet frame in euclidean 3-space[J]. Maejo International Journal of Science and Technology, 2023, 17 (2): 96- 106. |
| 28 |
MAEKAWA T . An overview of offset curves and surfaces[J]. Computer-Aided Design, 1999, 31 (3): 165- 173.
doi: 10.1016/S0010-4485(99)00013-5 |
| 29 | ELBER G , COHEN E . Error bounded variable distance offset operator for free form curves and surfaces[J]. International Journal of Computational Geometry & Applications, 1991, 1 (1): 67- 78. |
| 30 |
SEONG J K , ELBER G , KIM M S . Trimming local and global self-intersections in offset curves/surfaces using distance maps[J]. Computer-Aided Design, 2006, 38 (3): 183- 193.
doi: 10.1016/j.cad.2005.08.002 |
| 31 |
LEE I K , KIM M S , ELBER G . Planar curve offset based on circle approximation[J]. Computer-Aided Design, 1996, 28 (8): 617- 630.
doi: 10.1016/0010-4485(95)00078-X |
| 32 |
MAEKAWA T , PATRIKALAKIS N M , SAKKALIS T , et al. Analysis and applications of pipe surfaces[J]. Computer Aided Geometric Design, 1998, 15 (5): 437- 458.
doi: 10.1016/S0167-8396(97)00042-3 |
| 33 | GAO F, WU W, LIN Y, et al. Online safe trajectory generation for quadrotors using fast marching method and bernstein basis polynomial[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2018: 344-351. |
| 34 |
LI Q , WEI J Y , GOU Q X , et al. Distributed adaptive fixed-time formation control for second-order multi-agent systems with collision avoidance[J]. Information Sciences, 2021, 564, 27- 44.
doi: 10.1016/j.ins.2021.02.029 |
| [1] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [2] | Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike [J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358. |
| [3] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [4] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [5] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [6] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [7] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [8] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [9] | Heng TANG, Wei SUN, Lei LYU, Ruofei HE, Jianjun WU, Changhao SUN, Tianye SUN. UAV formation path planning approach incorporating dynamic reward strategy [J]. Systems Engineering and Electronics, 2024, 46(10): 3506-3518. |
| [10] | Shibo XIAO, Guoyuan QI, Jiahao DENG, Pengpeng SU, Jingtong JIA. Space satisfaction planning for curved virtual tube of unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(10): 3528-3535. |
| [11] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [12] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [13] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [14] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [15] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||