Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (9): 2993-3003.doi: 10.12305/j.issn.1001-506X.2025.09.20
• Systems Engineering • Previous Articles
Hierarchical decision-making algorithm for UAV air combat maneuvering based on deep reinforcement learning
Xiaolong WEI1( ), Yarong WU1(), Dengkai YAO2,*(), Guhao ZHAO1()
), Yarong WU1(), Dengkai YAO2,*(), Guhao ZHAO1()
- 1. Air Traffic Control and Navigation School,Air Force Engineering University,Xi’an 710051,China
2. Modern aviation college,Guangzhou institute of science and technology,Guangzhou 510540,China
-
Received:2024-07-23Online:2025-09-25Published:2025-09-16 -
Contact:Dengkai YAO E-mail:xiaolong3494@163.com;chumiaoying2023@163.com;yao13321185369@163.com;zghlupin@163.com
CLC Number:
Cite this article
Xiaolong WEI, Yarong WU, Dengkai YAO, Guhao ZHAO. Hierarchical decision-making algorithm for UAV air combat maneuvering based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2025, 47(9): 2993-3003.
share this article
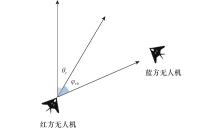
Fig.1
Unmanned aerial vehicle angle relationship"
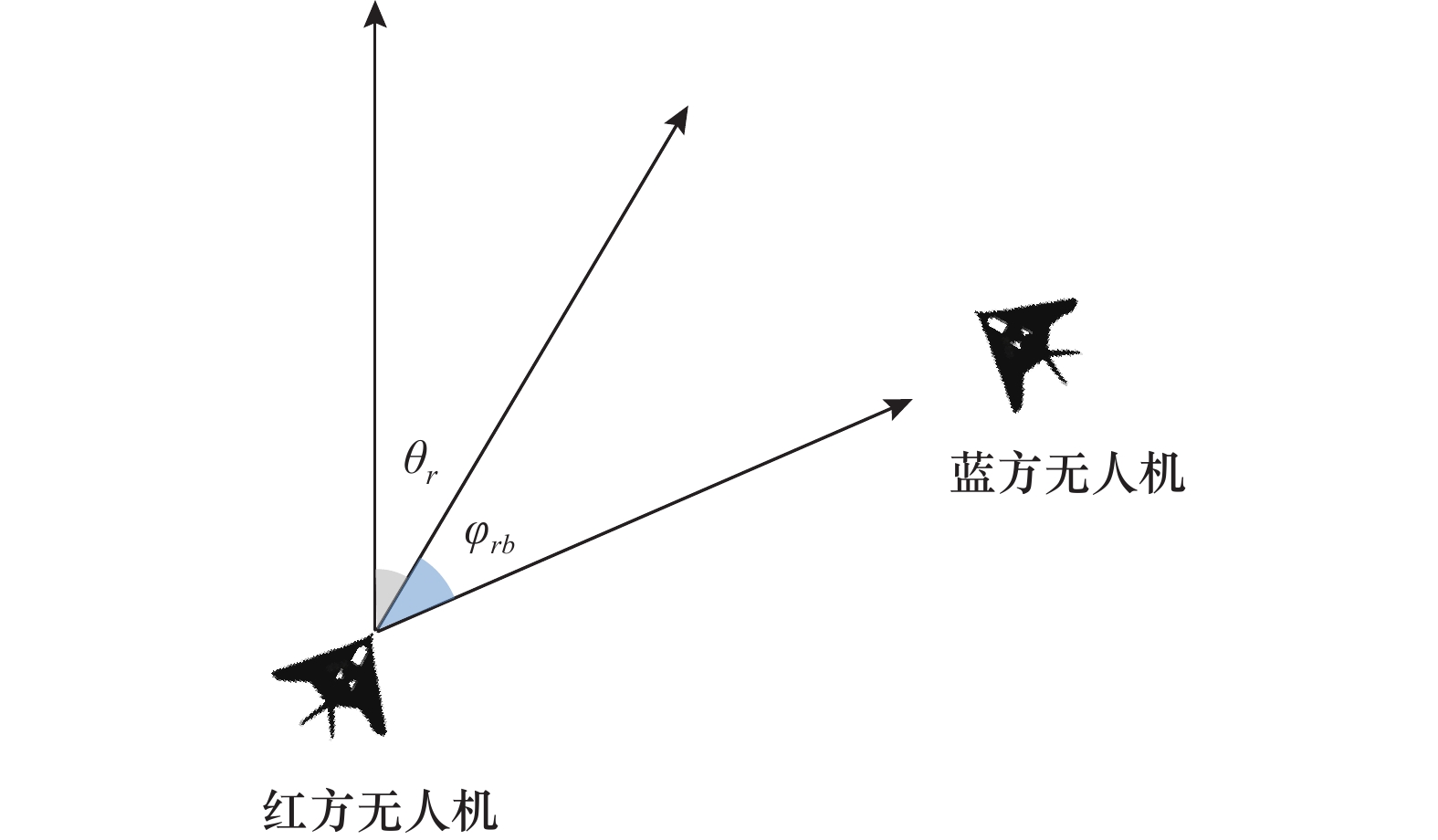
Fig.2
Unmanned aerial vehicle air combat maneuvering method"
Table 1
Types of unmanned aerial vehicle maneuvering decisions"
| 代号 | 机动方式 | 含义 |
| 1 | 减速快速左转 | 无人机在左转的同时减速,但使用的转弯率较大 |
| 2 | 减速慢速左转 | 无人机在左转的同时减速,但使用的转弯率较小 |
| 3 | 减速直飞 | 无人机减速直飞 |
| 4 | 减速慢速右转 | 无人机在右转的同时减速,但使用的转弯率较小 |
| 5 | 减速快速右转 | 无人机在右转的同时减速,但使用的转弯率较大 |
| 6 | 加速快速左转 | 无人机在左转的同时增速,且使用的转弯率较大 |
| 7 | 加速慢速左转 | 无人机在左转的同时增速,且使用的转弯率较小 |
| 8 | 加速直飞 | 无人机加速直飞 |
| 9 | 加速慢速右转 | 无人机在右转的同时增速,且使用的转弯率较小 |
| 10 | 加速快速右转 | 无人机在右转的同时增速,且使用的转弯率较大 |
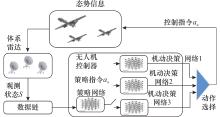
Fig.3
Hierarchical network control architecture of unmanned aerial vehicle"
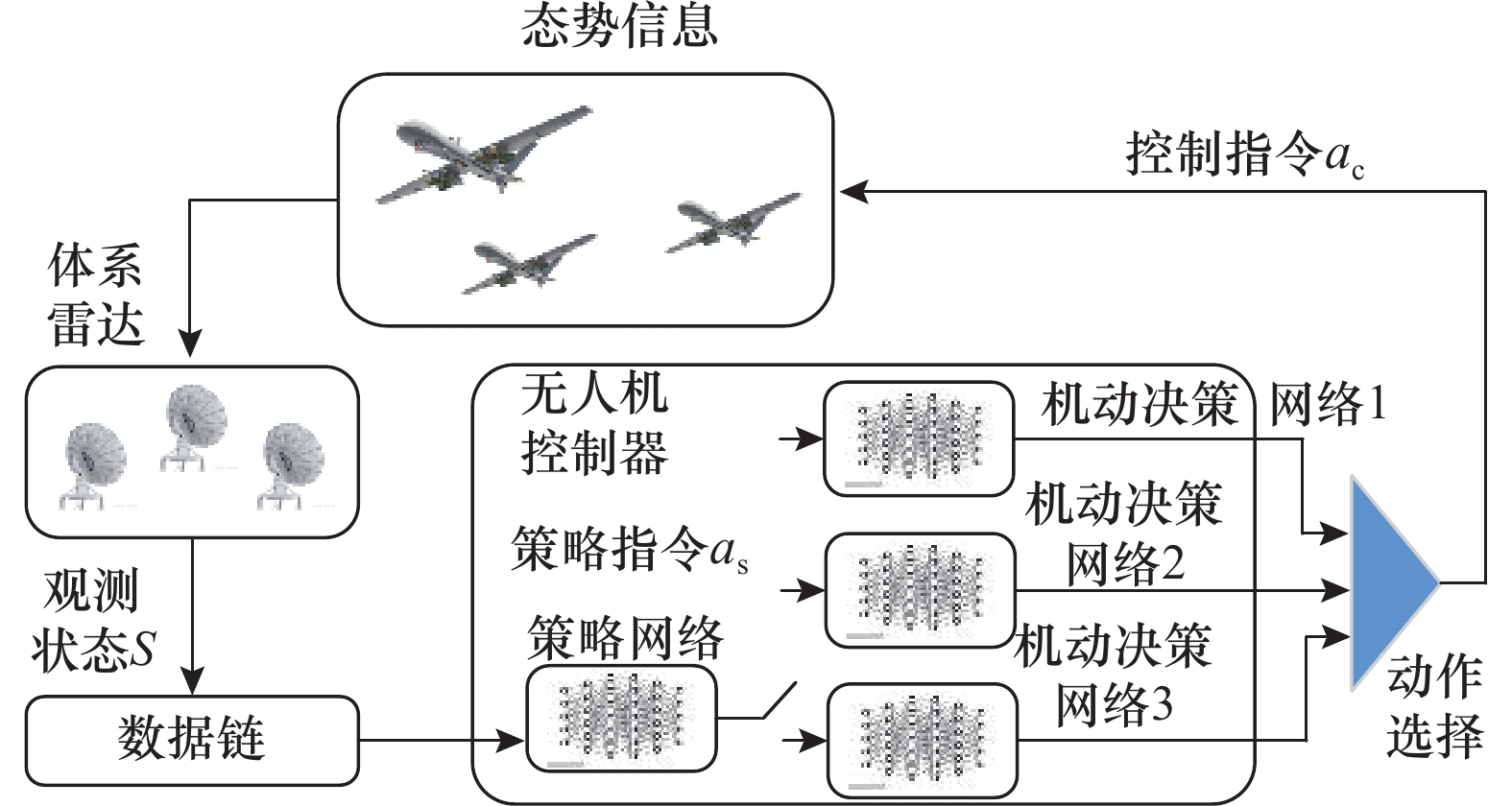
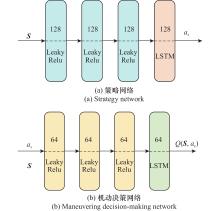
Fig.4
Neural network structure of unmanned aerial vehicle controller"
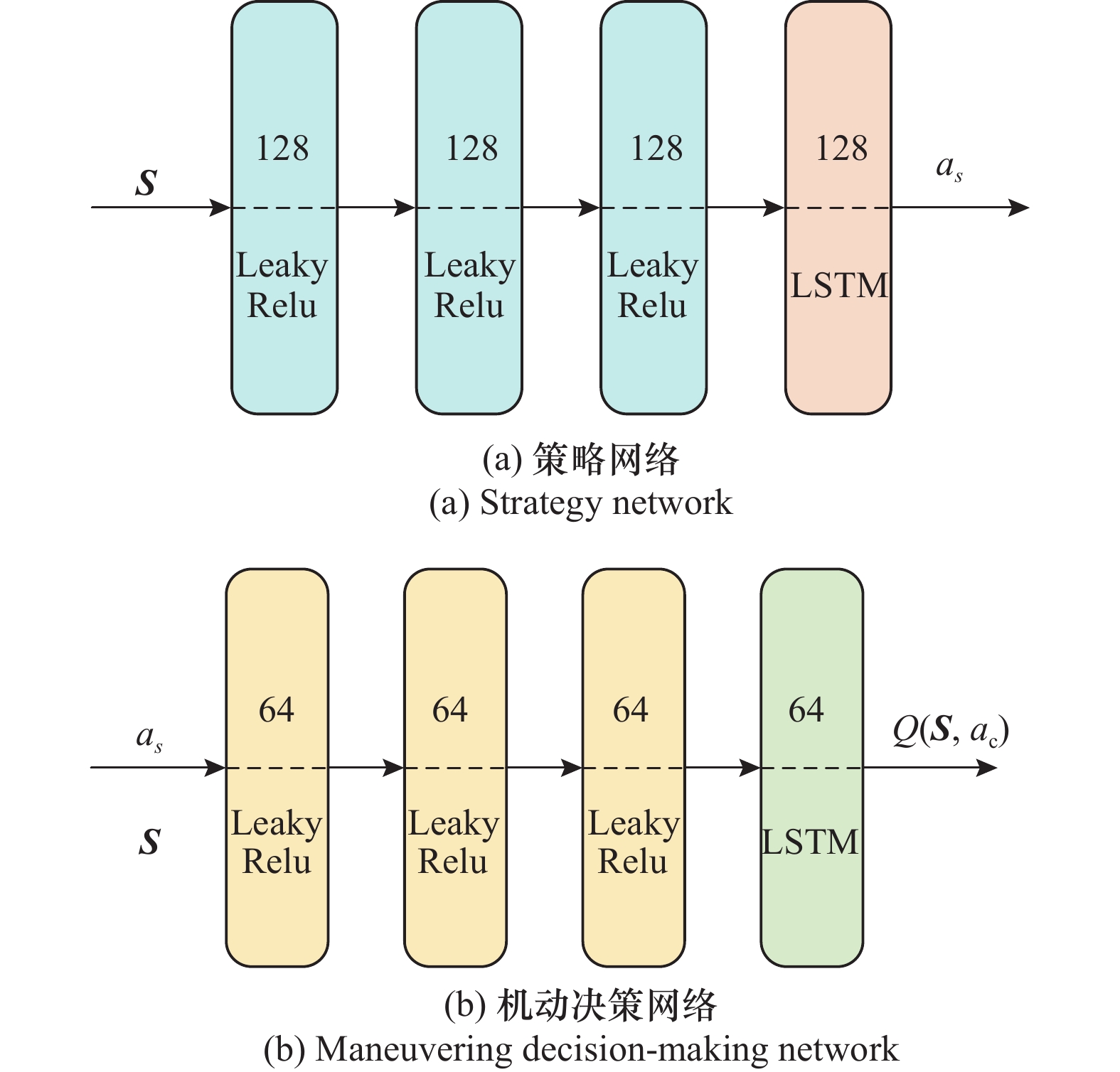
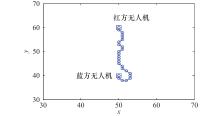
Fig.5
Q value estimation path generated by ACO algorithm"
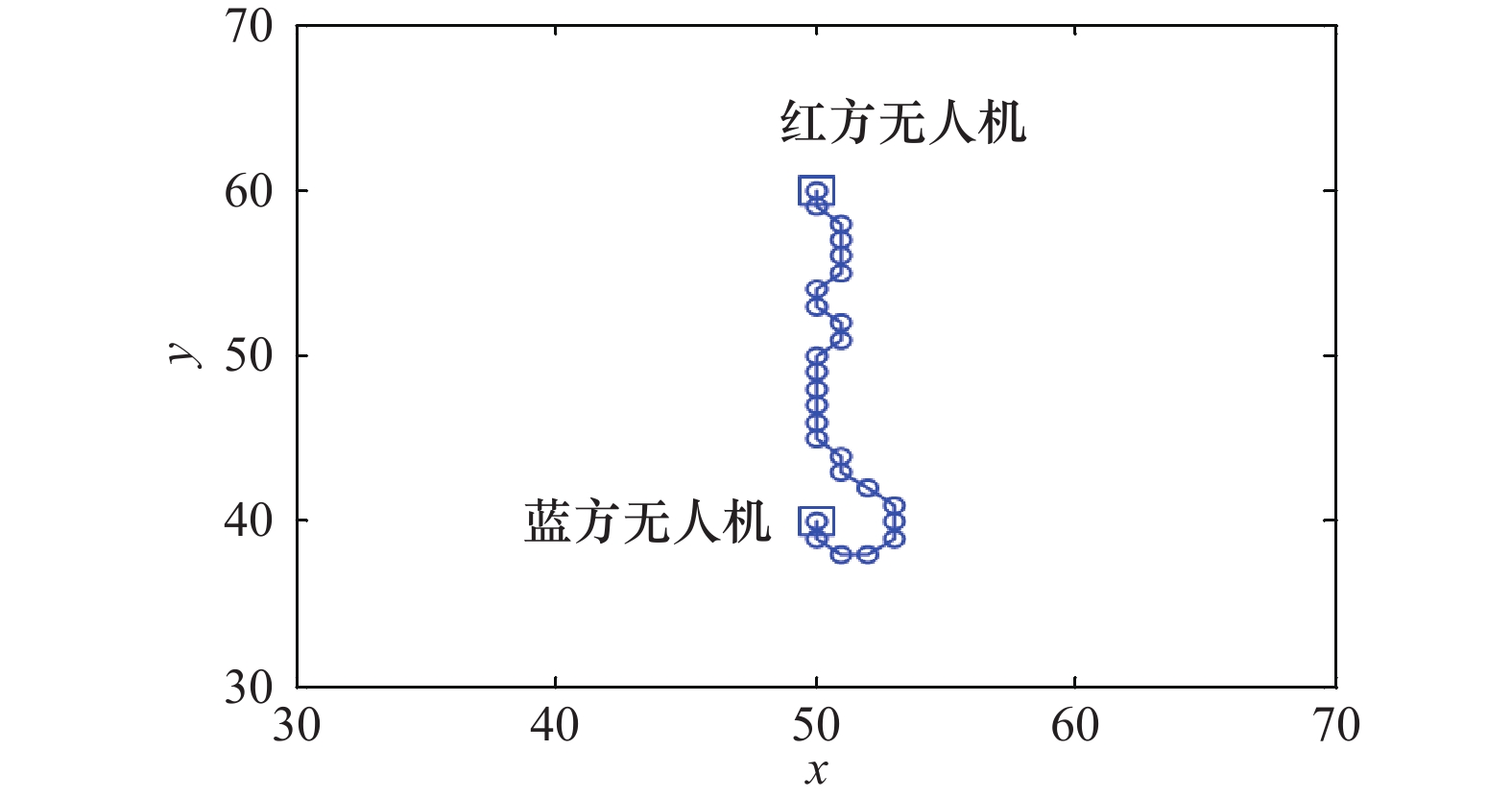
Table 2
Algorithm parameters"
| 参数 | 取值 |
| 80 | |
| 60 | |
| D1 | 16 |
| D2 | 5 |
| D3 | 1 |
| 0.9 | |
| 策略网络学习率 | 10−4 |
| 动作网络学习率 | 10−6 |
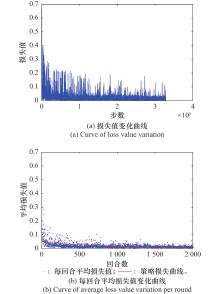
Fig.6
Curve of strategic network loss value variation"
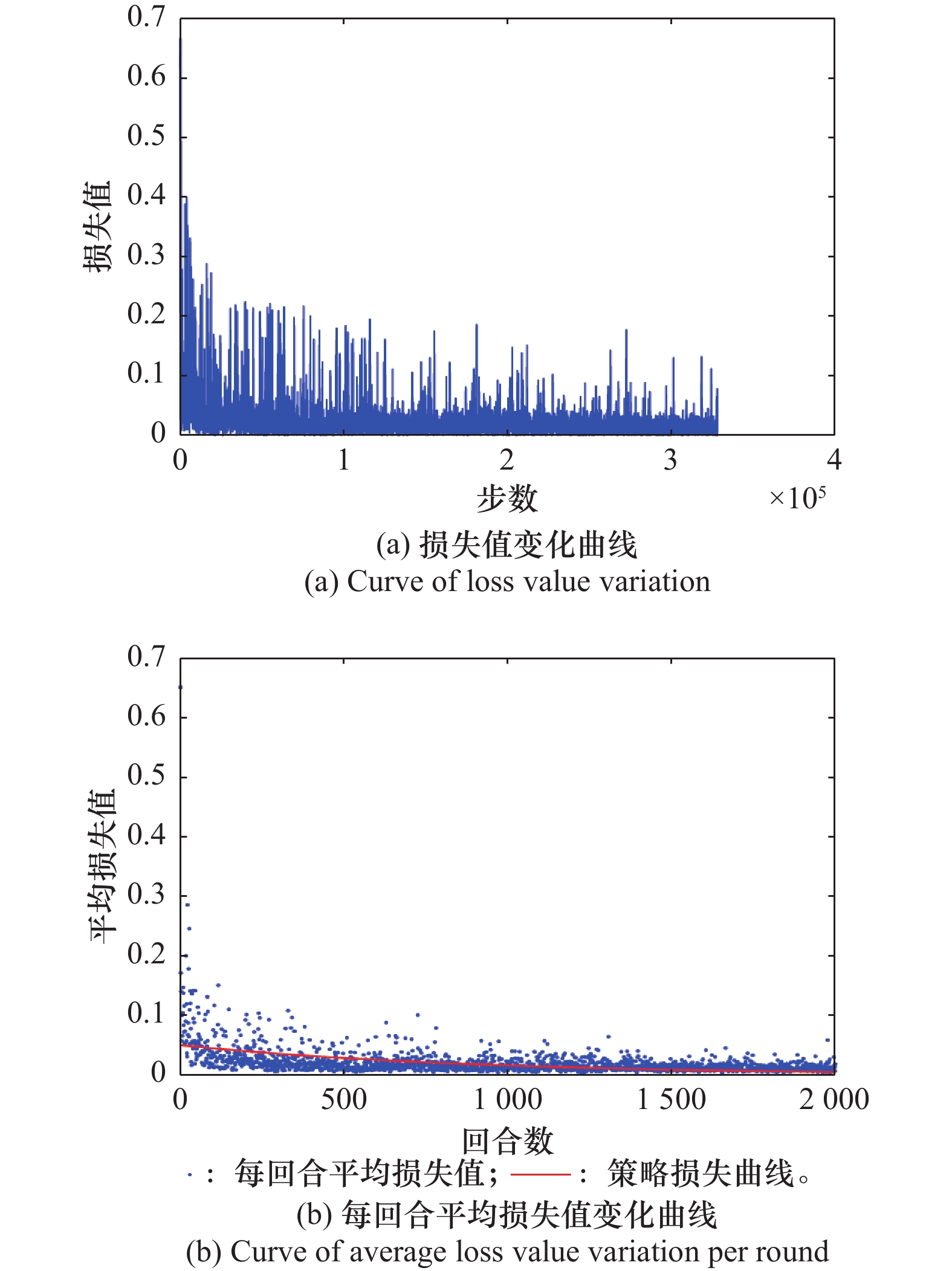
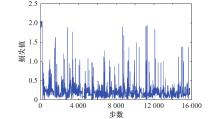
Fig.7
Single deep network loss function"
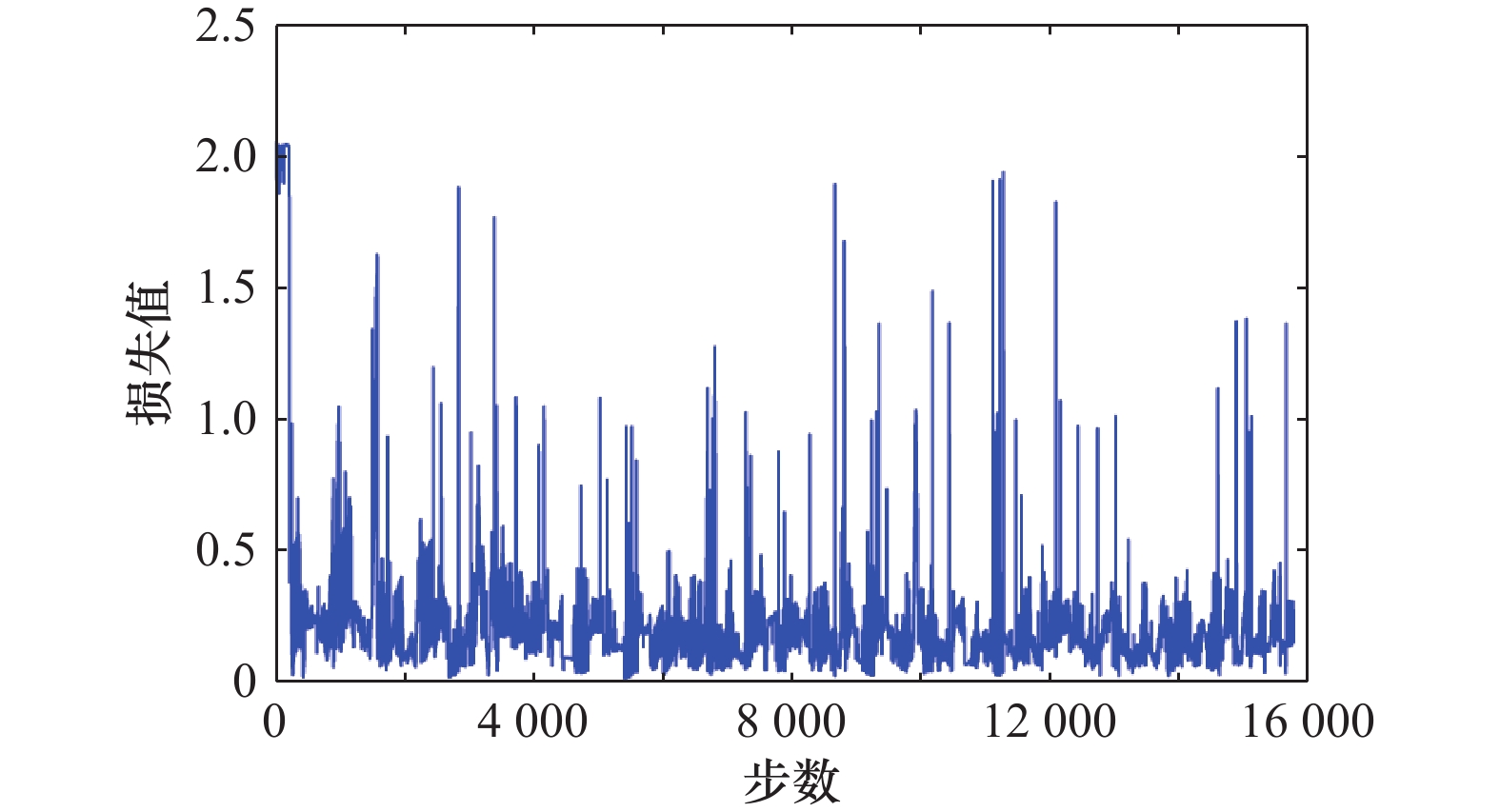
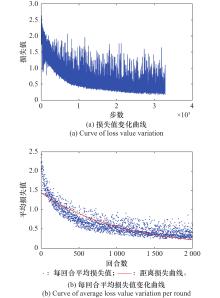
Fig.8
Curve of distance maneuvering network loss value variation"
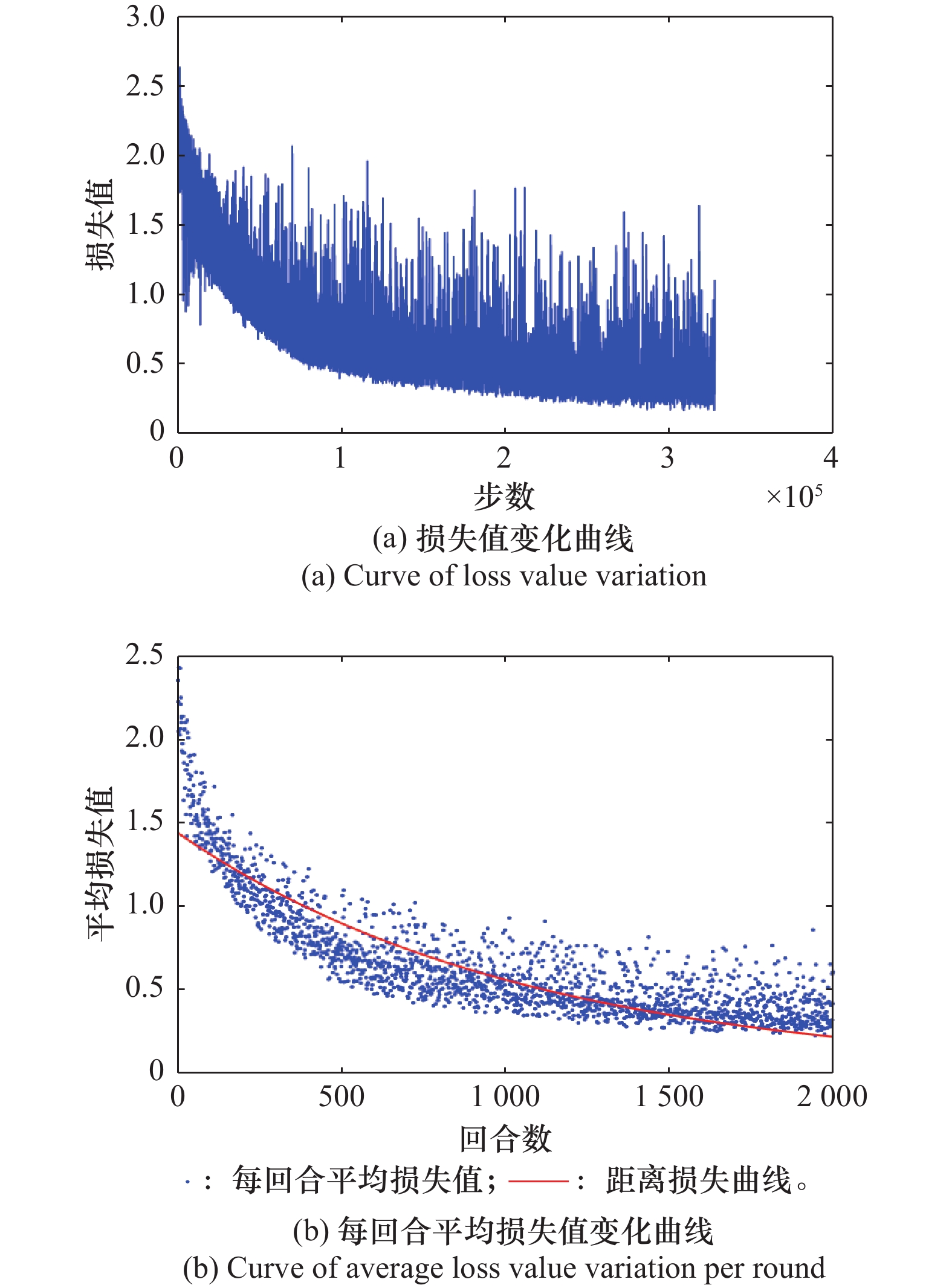
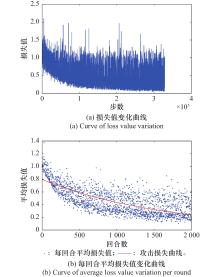
Fig.9
Curve of attack maneuvering network loss value variation"
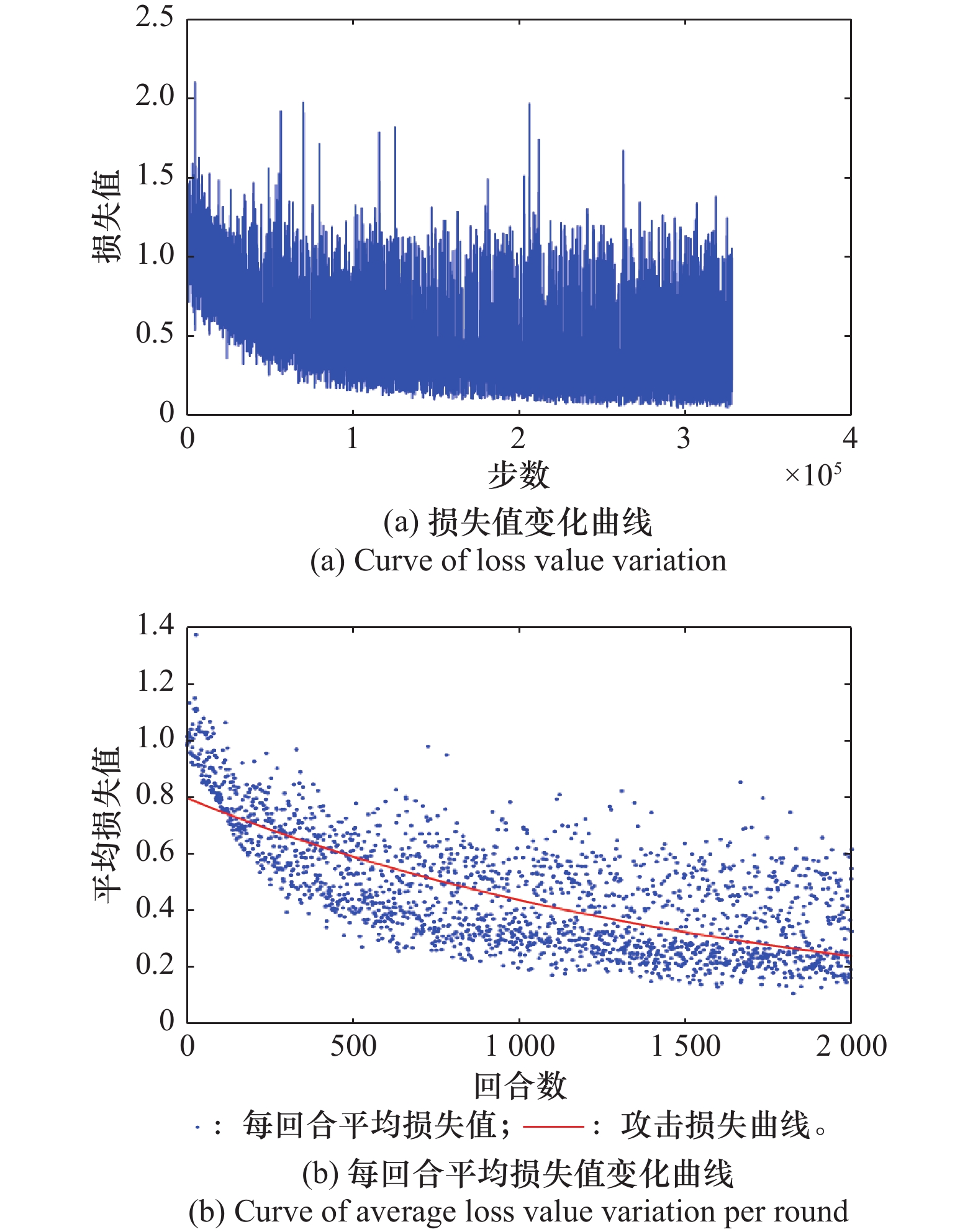
Fig.10
Curve of threat maneuvering network loss value variation"
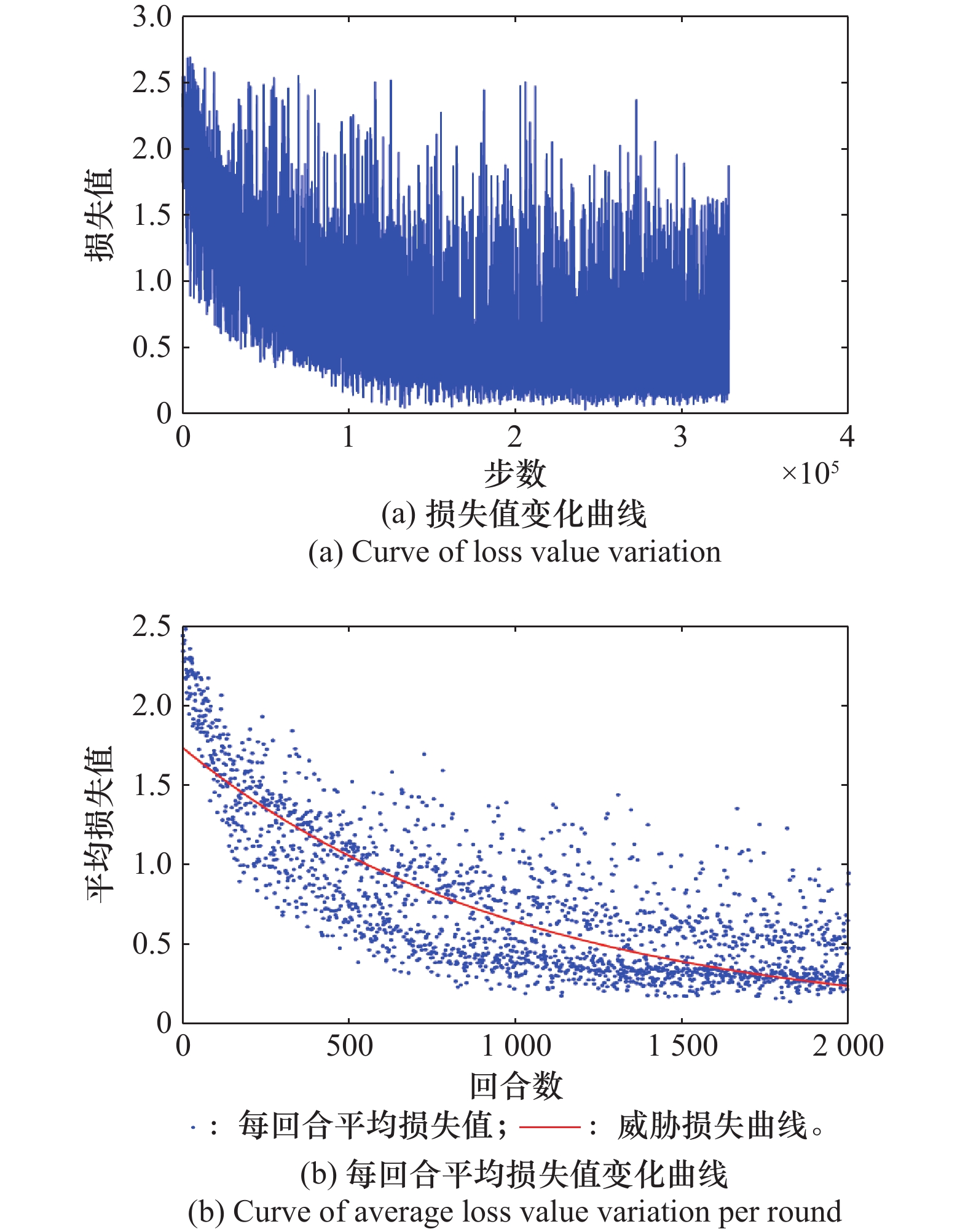
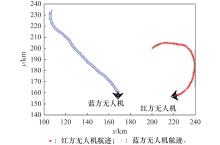
Fig.11
Air combat process of unmanned aerial vehicle confrontation"
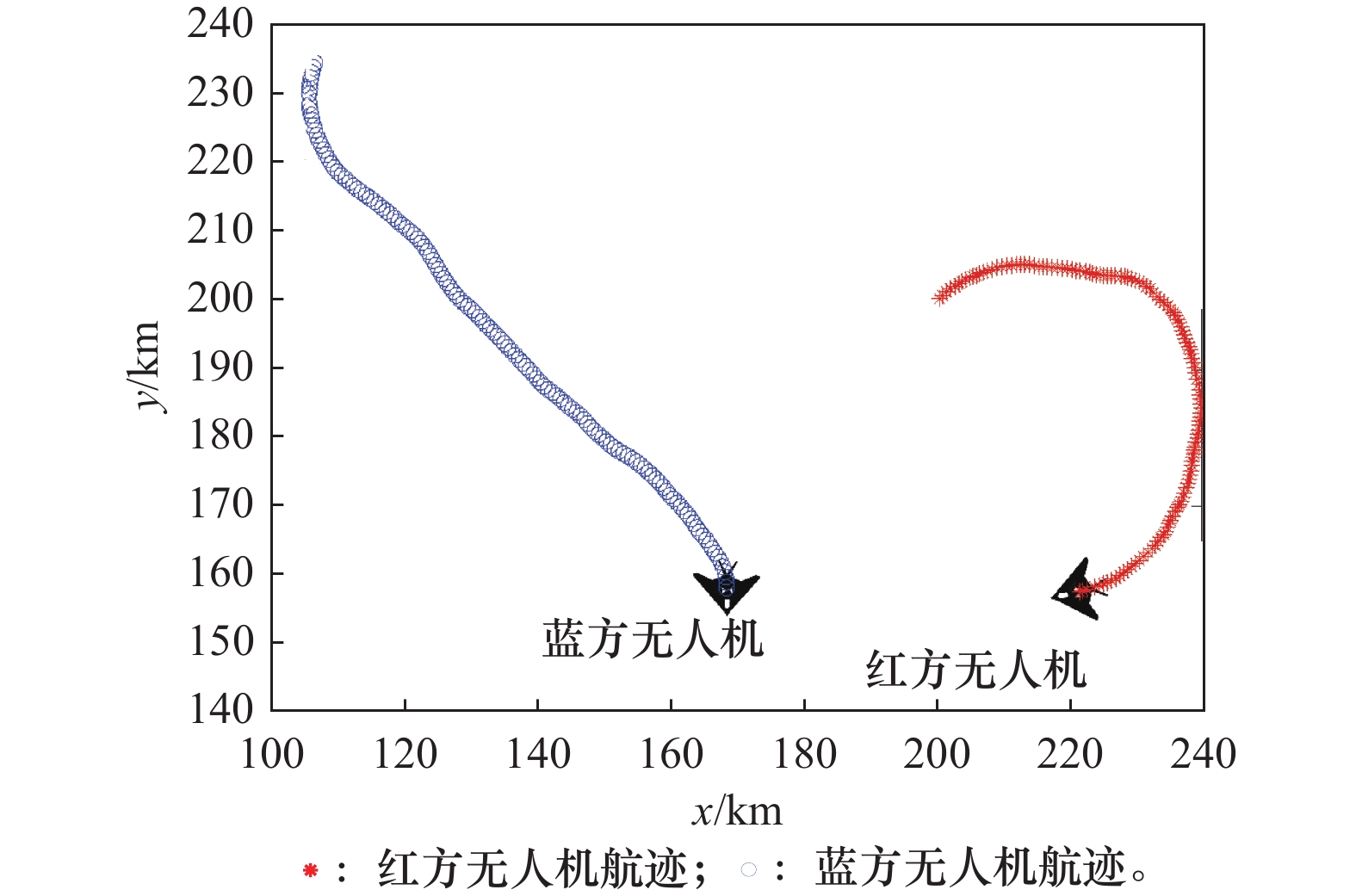
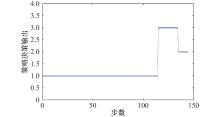
Fig.12
Decision-making output of strategy network"
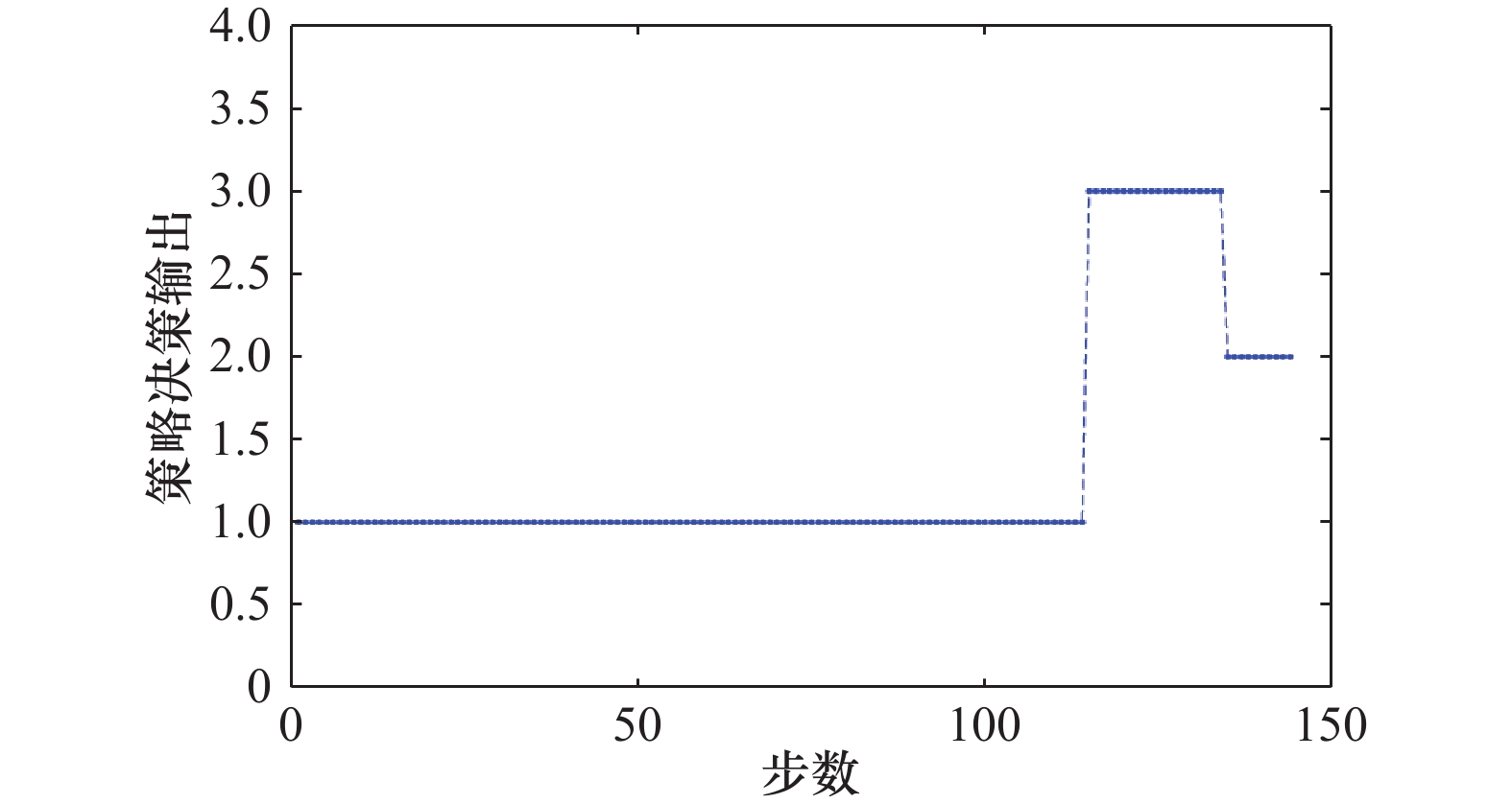
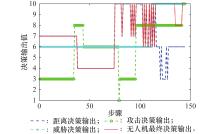
Fig.13
Decision-making output of action network"
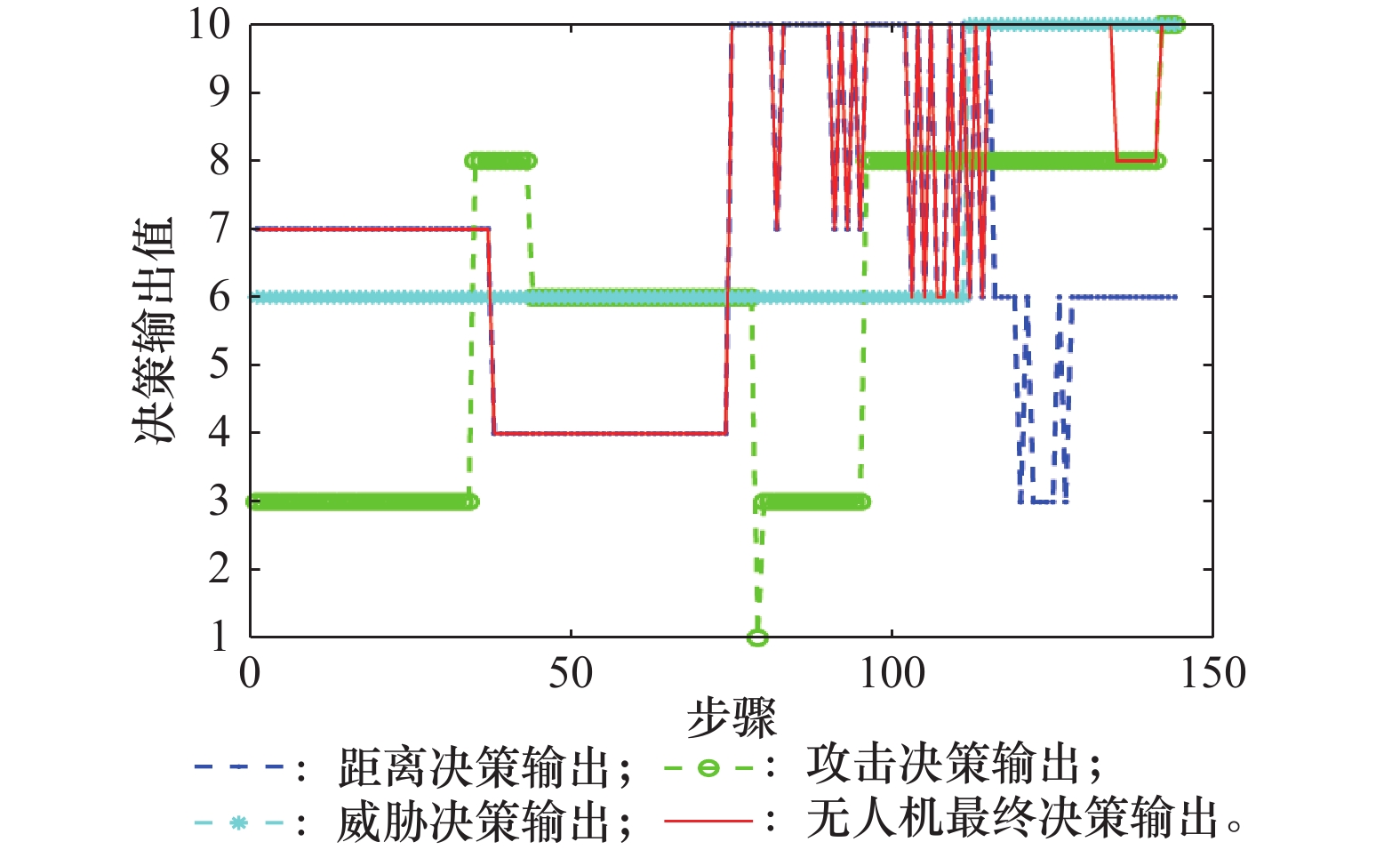
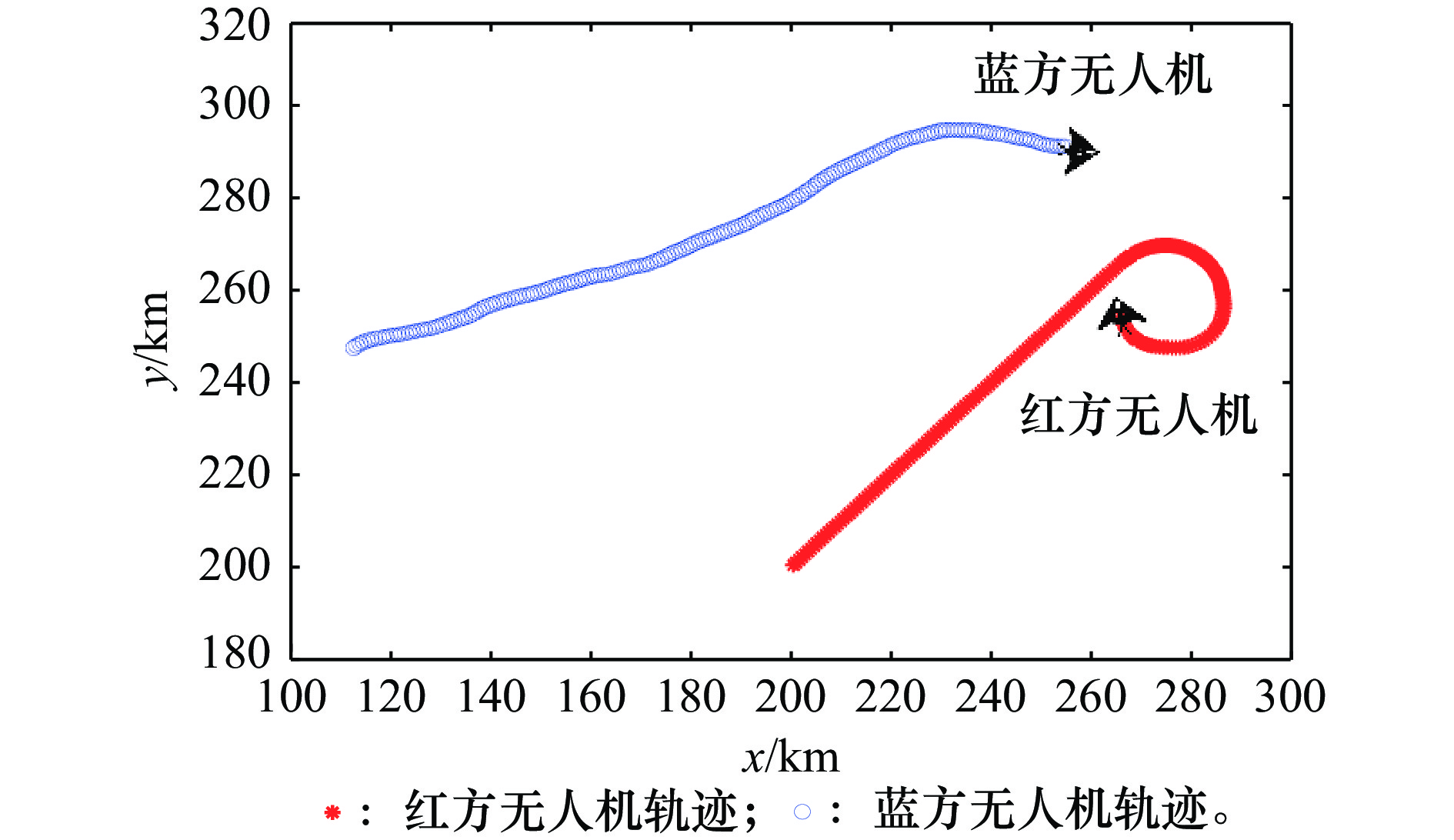
Fig.14
Winning with initial situation disadvantage"
Fig.15
Escape with initial situation disadvantage"
Fig.16
Comparison chart of decision-making time"

| 1 |
黄长强. 未来空战过程智能化关键技术研究[J]. 航空兵器, 2019, 26 (1): 11- 19.
doi: 10.12132/ISSN.1673-5048.2017.0002 |
|
HUANG C Q. Research on key technology of future air combat process intelligentization[J]. Aero Weaponry, 2019, 26 (1): 11- 19.
doi: 10.12132/ISSN.1673-5048.2017.0002 |
|
| 2 |
谢建峰, 杨啟明, 戴树岭, 等. 基于强化遗传算法的无人机空战机动决策研究[J]. 西北工业大学学报, 2020, 38 (6): 1330- 1338.
doi: 10.3969/j.issn.1000-2758.2020.06.024 |
|
XIE J F, YANG Q M, DAI S L, et al. Air combat maneuver decision based on reinforcement genetic algorithm[J]. Journal of Northwestern Polytechnical University, 2020, 38 (6): 1330- 1338.
doi: 10.3969/j.issn.1000-2758.2020.06.024 |
|
| 3 |
HU D Y, YANG R N, ZUO J L, et al. Application of deep reinforcement learning in maneuver planning of beyond-visual-range air combat[J]. IEEE Access, 2021, 9, 32282- 32297.
doi: 10.1109/ACCESS.2021.3060426 |
| 4 |
韩统, 崔明朗, 张伟, 等. 多无人机协同空战机动决策[J]. 兵器装备工程学报, 2020, 41 (4): 117- 123.
doi: 10.11809/bqzbgcxb2020.04.023 |
|
HAN T, CUI M L, ZHANG W, et al. Multi-UCAV cooperative air combat maneuvering decision[J]. Journal of Ordnance Equipment Engineering, 2020, 41 (4): 117- 123.
doi: 10.11809/bqzbgcxb2020.04.023 |
|
| 5 | 朱星宇, 艾剑良. 多对多无人机空战的智能决策研究[J]. 复旦学报(自然科学版), 2021, 60 (4): 410- 419. |
| ZHU X Y, AI J L. Research on intelligent decision making of many to many unmanned aerial vehicle air combat[J]. Journal of Fudan University (Natural Science), 2021, 60 (4): 410- 419. | |
| 6 | 王宇琨, 王泽, 董力维, 等. 基于分层的智能建模方法的多机空战行为建模[J]. 系统仿真学报, 2023, 35 (10): 2249- 2261. |
| WANG Y K, WANG Z, DONG L W, et al. Research on multi-aircraft air combat behavior modeling based on hierarchical intelligent modeling methods[J]. Journal of System Simulation, 2023, 35 (10): 2249- 2261. | |
| 7 |
牛军锋, 甘旭升, 魏潇龙, 等. 异型无人机空战对抗协同机动决策研究[J]. 指挥与控制学报, 2023, 9 (3): 292- 302.
doi: 10.3969/j.issn.2096-0204.2023.03.0292 |
|
NIU J F, GAN X S, WEI X L, et al. Cooperative maneuver decision-making of antagonistic air combat of special shaped UAV[J]. Journal of Command and Control, 2023, 9 (3): 292- 302.
doi: 10.3969/j.issn.2096-0204.2023.03.0292 |
|
| 8 | 王宏健, 于丹, 徐欣, 等. 非对称博弈下多UUV 基地防卫协同对抗策略[J]. 智能系统学报, 2022, 17 ( 2 ) : 348-359. |
| WANG H J, YU D, XU X, et al. Multi-UUV base defense cooperative countermeasure under the asymmetric game condition[J]. CAAI Transactions on Intelligent Systems, 2022, 17(2): 348–359. | |
| 9 | GREYDANUS S, KOUL A, DODGE J, et al. Visualizing and understanding atari agents[C]//Proc. of the 35th International Conference on Machine Learning, 2018: 1792-1801. |
| 10 | SCHWARZROCK J, ZACARIAS I, BAZZAN A L C, et al. Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence[J]. Engineering Applications of Artificial Intelligence, 2018, 72, 10- 20. |
| 11 | GENG W X, KONG F, MA D Q. Study on tactical decision of UAV medium-range air combat[C]//Proc. of the 26th Chinese Control and Decision Conference, 2014: 135−139. |
| 12 | PIAO H Y, SUN Z X, MENG G L, et al. Beyond-visual range air combat tactics auto-generation by reinforcement learning[C]//Proc. of the International Joint Conference on Neural Networks, 2020. |
| 13 |
ZHANG X B, LIU G Q, YANG C J, et al. Research on air combat maneuver decision-making method based on reinforcement learning[J]. Electronics, 2018, 7 (11): 279.
doi: 10.3390/electronics7110279 |
| 14 | XUAN J Y, LU J, YAN Z, et al. Bayesian deep reinforcement learning via deep kernel learning[J]. International Journal of Computational Intelligence Systems, 2018, 12 (10): 164- 171. |
| 15 | YANG Y O, WANG X Q, HU R Z, et al. APER-DDQN: UAV precise airdrop method based on deep reinforcement learning[J]. IEEE Access, 2022, 10: 50878−50891. |
| 16 | SIHEM O, MILOUD B, JONATHAN P, et al. Deep reinforcement learning based collision avoidance in UAV environment[J]. IEEE Internet of Things Journal, 2022, (9): 4015- 4030. |
| 17 | YANG K, LIU L. An improved deep reinforcement learning algorithm for path planning in unmanned driving[J]. IEEE Access, 2024, 12: 67935−67944. |
| 18 |
HU Z J, GAO X G, WAN K F, et al. Relevant experience learning: a deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments[J]. Chinese Journal of Aeronautics, 2021, 34 (12): 187- 204.
doi: 10.1016/j.cja.2020.12.027 |
| 19 |
ZHAN G, ZHANG K, LI K, et al. UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience[J]. Journal of Systems Engineering and Electronics, 2024, 35 (3): 644- 665.
doi: 10.23919/JSEE.2024.000022 |
| 20 | 雷毅飞, 王露禾, 贺泊茗, 等. 基于深度强化学习的多无人机空战机动策略研究[J]. 航空科学技术, 2024, 35 (3): 111- 118. |
| LEI Y F, WANG L H, HE B M, et al. Research on multi-UAV air combat maneuver strategy based on deep reinforcement learning[J]. Aeronautical Science & Technology, 2024, 35 (3): 111- 118. | |
| 21 | LI Y, HAN W, WANG Y Q, et al. Deep reinforcement learning with application to air confrontation intelligent decision-making of manned/unmanned aerial vehicle cooperative system[J]. IEEE Access, 2020, 8, 67887- 67898. |
| 22 | LIU X, ZHONG W Z, WANG X, et al. Deep reinforcement learning-based 3D trajectory planning for cellular connected UAV[J]. Drones, 2024, 8(5): 199. |
| 23 | ZHOU K, WEI R X, XU Z F, et al. A brain like air combat learning system inspired by human learning mechanism[C]// Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2018. |
| 24 | 王宝来, 高显忠, 谢涛, 等. 基于强化学习与种群博弈的近距空战决策研究[J]. 航空学报, 2024, 45(12): 329446. |
| WANG B L, GAO X Z, XIE T, et al. Research on decision-making in close-range air combat based on reinforcement learning and population game[J]. Acta Aeronautica et Astronautica Sinica: 2024, 45(12): 329446. | |
| 25 | YANG Q M, ZHANG J D, SHI G Q, et al. Maneuver decision of UAV in short-range air combat based on deep reinforcement learning[J]. IEEE Access, 2020, 8, 363- 378. |
| 26 | 吕超, 李慕宸, 欧家骏. 基于分层深度强化学习的无人机混合路径规划[EB/OL]. [2024-06-23]. https://doi.org/10.13700/j.bh.1001-5965.2023.0550. |
| LV C, LI M C, OU J J, UAV hybrid path planning based on hierarchical deep reinforcement learning[EB/OL]. [2024-06-23]. https://doi.org/10.13700/j.bh.1001-5965.2023.0550. | |
| 27 | 唐上钦, 谢磊, 王渊, 等. 无人机自主空战战术决策仿真系统设计与实现[J]. 计算机工程与应用, 2022, 58(21): 272−288. |
| TANG S Q, XIE L, WANG Y, et al. Design and implementation of UAV autonomous air combat tactical decision simulation system[J]. Computer Engineering and Applications, 2022, 58(21): 272−288. | |
| 28 | CHEN X H, QI Y H, YIN Y Z, et al. A multi-stage deep reinforcement learning with search-based optimization for air-ground unmanned system navigation[J]. Applied Sciences, 2023, 13(4): 2244. |
| 29 | WEI Y J, ZHANG H P, WANG Y, et al. Autonomous maneuver decision-making through curriculum learning and reinforcement learning with sparse rewards[J]. IEEE Access, 2023, 11: 73543−73555 . |
| 30 | YUE L F, YANG R N, ZUO J L, et al. Unmanned aerial vehicle swarm cooperative decision-making for SEAD mission: a hierarchical multiagent reinforcement learning approach[J]. IEEE Access, 2022, 10: 92177−92191. |
| 31 | HU J W, WANG L H, HU T M, et al. Autonomous maneuver decision making of dual-UAV cooperative air combat based on deep reinforcement learning[J]. Electronics, 2022, 11(3): 467. |
| 32 | 王晓光, 章卫国, 陈伟. 无人机编队超视距空战决策及作战仿真[J]. 控制与决策, 2015, 30 (2): 328- 334. |
| WANG X G, ZHANG W G, CHEN W. BVR air combat decision making and simulation for UAV formation[J]. Control and Decision, 2015, 30 (2): 328- 334. | |
| 33 |
周攀, 黄江涛, 章胜, 等. 基于深度强化学习的智能空战决策与仿真[J]. 航空学报, 2023, 44 (4): 126731.
doi: 10.7527/S1000-6893.2022.26731. |
|
ZHOU P, HUANG J T, ZHANG S, et al. Research on UAV intelligent air combat decision and simulation based on deep reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (4): 126731.
doi: 10.7527/S1000-6893.2022.26731. |
|
| 34 | 杨书恒, 张栋, 熊威, 等. 基于可解释性强化学习的空战机动决策方法[J]. 航空学报, 2024, 45(18): 329922. |
| YANG S H, ZHANG D, XIONG W, et al. A decision-making method for air combat maneuver based on explainable reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(18): 329922. | |
| 35 | 陈蔼祥. 深度学习[M]. 北京: 清华大学出版社, 2020. |
| CHEN A X. Deep learning[M]. Beijing: Tsinghua University Press, 2020. | |
| 36 | WANG L, LUO C M, LI M C, et al. Trajectory planning of an autonomous mobile robot by evolving ant colony system[J]. International Journal of Robotics and Automation, 2017, 32 (4): 112- 121. |
| 37 | MA X X, LIU C. Improved ant colony algorithm for the split delivery vehicle routing problem[J]. Applied Sciences, 2024, 14(12): 5090 . |
| 38 |
姚培源, 魏潇龙, 俞利新, 等. 基于Q-Learning算法的无人机空战机动决策研究[J]. 电光与控制, 2023, 30 (5): 16- 22.
doi: 10.3969/j.issn.1671-637X.2023.05.004 |
|
YAO P Y, WEI X L, YU L X, et al. Research on UAV air combat maneuver decision based on Q-learning algorithm[J]. Electronics Optics & Control, 2023, 30 (5): 16- 22.
doi: 10.3969/j.issn.1671-637X.2023.05.004 |
| [1] | Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests [J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631. |
| [2] | Xiaowei YAN, Chong LING, Shengbin SHI. Design and implementation of a rapid detection system for surface unexploded submunitions [J]. Systems Engineering and Electronics, 2025, 47(8): 2639-2645. |
| [3] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Attack-defense confrontation strategy of multi-UAV based on APIQ algorithm [J]. Systems Engineering and Electronics, 2025, 47(7): 2205-2215. |
| [4] | Yundou ZHU, Haiquan SUN, Xiaoxuan HU. Multi-satellite cooperative imaging task planning method based on pointer network architecture [J]. Systems Engineering and Electronics, 2025, 47(7): 2246-2255. |
| [5] | Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial [J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338. |
| [6] | Junchao TANG, Chunhe HU. Complete coverage path planning for UAVs in 3D terrain and wind field environment [J]. Systems Engineering and Electronics, 2025, 47(7): 2349-2356. |
| [7] | Yunfeng HE, Xianjun SHI, Jianhua LU, Chaolun ZHAO, Guorong ZHAO. Multi-UAV grouping formation control based on synchronous DMPC under fault conditions [J]. Systems Engineering and Electronics, 2025, 47(7): 2357-2370. |
| [8] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879. |
| [9] | Linzhi MENG, Xiaojuan SUN, Yuxin HU, Bin GAO, Guoqing SUN, Wenhao MU. Reinforcement learning task scheduling algorithm for satellite on-orbit processing [J]. Systems Engineering and Electronics, 2025, 47(6): 1917-1929. |
| [10] | Kangjie ZHENG, Xinyu ZHANG, Weisong WANG, Zhensheng LIU. Intelligent ship dynamic autonomous obstacle avoidance decision based on DQN and rule [J]. Systems Engineering and Electronics, 2025, 47(6): 1994-2001. |
| [11] | Shuhan LIU, Tong LI, Fuqiang LI, Chungang YANG. Intent and situation-dual driven anti-jamming communication mechanism for data link [J]. Systems Engineering and Electronics, 2025, 47(6): 2055-2064. |
| [12] | Ruijing CUI, Jianbin SUN, GKewei YAN, Minghao LI. Construction method of equipment operational test indicator system based on UAF [J]. Systems Engineering and Electronics, 2025, 47(5): 1536-1550. |
| [13] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [14] | Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction [J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234. |
| [15] | Zeyang YIN, Hao LIANG, Yuxin LIAO, Xiaofang CHEN, Yongfang XIE. UAV formation path planning based on reachable envelope analysis of dynamic obstacle [J]. Systems Engineering and Electronics, 2025, 47(4): 1275-1284. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||