Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (7): 2349-2356.doi: 10.12305/j.issn.1001-506X.2025.07.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Complete coverage path planning for UAVs in 3D terrain and wind field environment
Junchao TANG, Chunhe HU
- School of Technology, Beijing Forestry University, Beijing 100083, China
-
Received:2024-03-05Online:2025-07-16Published:2025-07-22 -
Contact:Chunhe HU
CLC Number:
Cite this article
Junchao TANG, Chunhe HU. Complete coverage path planning for UAVs in 3D terrain and wind field environment[J]. Systems Engineering and Electronics, 2025, 47(7): 2349-2356.
share this article
Fig.1
Overall environmental modelling"
Fig.2
Modelling of unmanned aerial vehicle movement in wind"
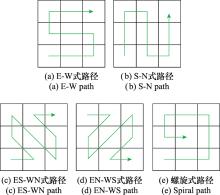
Fig.3
Five prospective coverage paths"
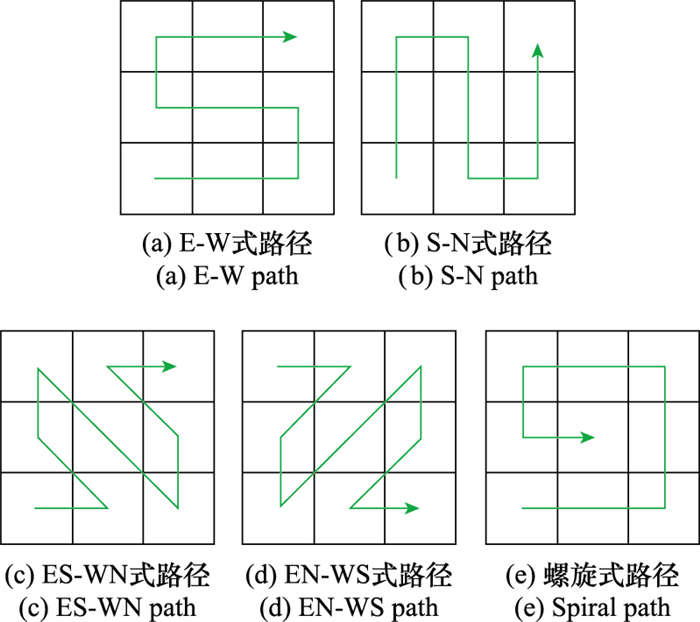
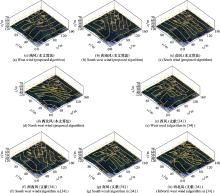
Fig.4
Comparison results of path planning for regular scenes"
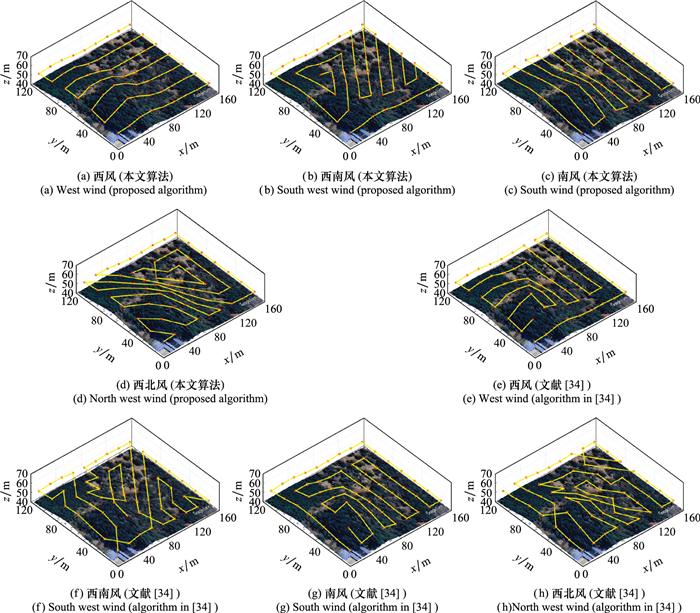
Table 1
Comparison of planning results of regular scenes"
| 环境风 | 算法 | 路径长度/m | 平均功耗/W | 能量消耗(×104)/J | 覆盖率/% |
| 西风 | 单一往复式[ | 1 130 | 232.7 | 4.381 | 100 |
| EG-CPP[ | 1 126 | 292.7 | 4.864 | 100 | |
| 本文算法 | 1 130 | 232.7 | 4.381 | 100 | |
| 西南风 | 单一往复式 | 1 130 | 423.2 | 7.119 | 100 |
| EG-CPP | 1 331 | 299.3 | 6.366 | 100 | |
| 本文算法 | 1 324 | 297.8 | 6.320 | 100 | |
| 南风 | 单一往复式 | 1 130 | 381.3 | 5.737 | 100 |
| EG-CPP | 1 126 | 278.7 | 4.740 | 100 | |
| 本文算法 | 1 127 | 238.2 | 4.418 | 100 | |
| 西北风 | 单一往复式 | 1 130 | 424.1 | 6.726 | 100 |
| EG-CPP | 1 278 | 322.4 | 6.263 | 100 | |
| 本文算法 | 1 351 | 281.9 | 5.899 | 100 |
"
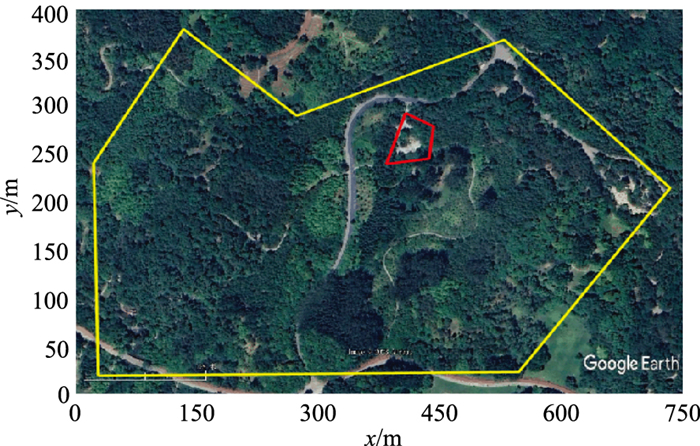
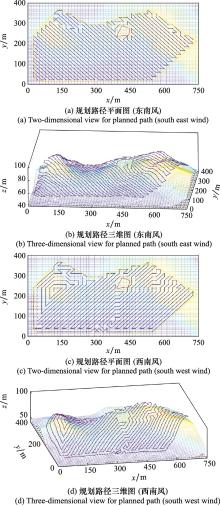
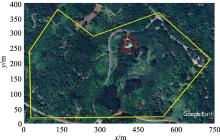
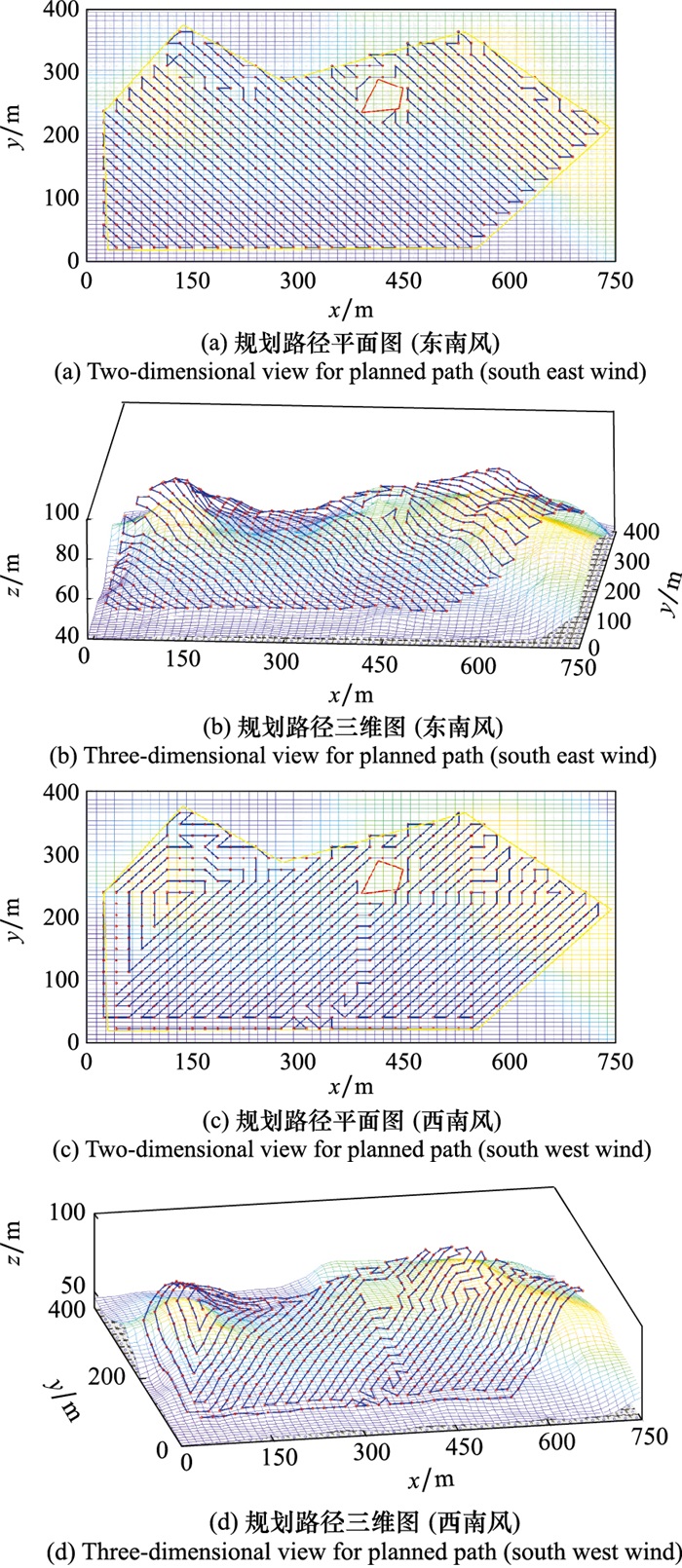
Fig.6
Result of path planning for complex scene"
| 1 | XIANG H Y , HAN Y H , PAN N , et al. Study on multi-UAV cooperative path planning for complex patrol tasks in large cities[J]. Drones, 2023, 7 (6): 367. |
| 2 | SUI H G , ZHANG H , GOU G H , et al. Multi-UAV cooperative and continuous path planning for high-resolution 3D scene reconstruction[J]. Drones, 2023, 7 (9): 544. |
| 3 | PRATAP T , JOSHUA V H , DAVID M , et al. Sensor planning for a symbiotic UAV and UGV system for precision agriculture[J]. IEEE Trans.on Robotics, 2016, 32 (6): 1498- 1511. |
| 4 | FRANCESCO N , DIOGO D , ANNE S , et al. Towards real-time building damage mapping with low-cost UAV solutions[J]. Remote Sensing, 2019, 11 (3): 287. |
| 5 | CABREIRA M T , BRISOLARA B L , FERREIRA-JR P R . Survey on coverage path planning with unmanned aerial vehicles[J]. Drones, 2019, 3 (1): 4. |
| 6 | 张世勇, 张雪波, 苑晶, 等. 旋翼无人机环境覆盖与探索规划方法综述[J]. 控制与决策, 2022, 37 (3): 513- 529. |
| ZHANG S Y , ZHANG X B , YUAN J , et al. A survey on cove-rage and exploration path planning with multi-rotor micro aerial vehicles[J]. Control and Decision, 2022, 37 (3): 513- 529. | |
| 7 | FEVGAS G , LAGKAS T , ARGYRIOU V , et al. Coverage path planning methods focusing on energy efficient and cooperative strategies for unmanned aerial vehicles[J]. Sensors, 2022, 22 (3): 1235. |
| 8 | AMNA K , IRAM N , HYEJEONG R , et al. Online complete coverage path planning using two-way proximity search[J]. Intelligent Service Robotics, 2017, 10 (3): 229- 240. |
| 9 | VASQUEZ-GOMEZ J I , MARCIANO-MELCHOR M , VAL ENTIN L , et al. Coverage path planning for 2D convex regions[J]. Journal of Intelligent & Robotic Systems, 2020, 97 (99): 81- 94. |
| 10 | TAUA M C , CARMELO D F , PAULO R F J , et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. Computer Science, 2018, 3 (4): 3662- 3668. |
| 11 | YAN L , HAI C , MENG J E , et al. Coverage path planning for UAVs based on enhanced exact cellular decomposition method[J]. Mechatronics, 2011, 21 (5): 876- 885. |
| 12 | MARINA T , DAVID A P , JOSÉ L V , et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55 (C): 441- 451. |
| 13 | 王红星, 马学娇, 张长森. 一种凹多边形区域的无人机覆盖路径规划算法[J]. 航空兵器, 2021, 28 (6): 46- 52. |
| WANG H X , MA X J , ZHANG C S . An algorithm of coverage path planning for UAV in concave polygon area[J]. Aero Weaponry, 2021, 28 (6): 46- 52. | |
| 14 | GHADDAR A , MEREI A , NATALIZIO E . PPS: energy-aware grid-based coverage path planning for UAVs using area partitioning in the presence of NFZs[J]. Sensors, 2020, 20 (13): 3742. |
| 15 |
吴靖宇, 朱世强, 宋伟, 等. 基于改进单元分解法的全覆盖路径规划[J]. 系统工程与电子技术, 2023, 45 (12): 3949- 3957.
doi: 10.12305/j.issn.1001-506X.2023.12.25 |
|
WU J Y , ZHU S Q , SONG W , et al. Coverage path planning based on improved cellular decomposition[J]. System Engineering and Electronics, 2023, 45 (12): 3949- 3957.
doi: 10.12305/j.issn.1001-506X.2023.12.25 |
|
| 16 | DAI R , FOTEDAR S , RADMANESH M , et al. Quality-aware UAV coverage and path planning in geometrically complex environments[J]. Ad Hoc Networks, 2018, 73, 95- 105. |
| 17 |
GONG Y G , CHEN K , NIU T Y , et al. Grid-based coverage path planning with NFZ avoidance for UAV using parallel self-adaptive ant colony optimization algorithm in cloud IoT[J]. Journal of Cloud Computing, 2022, 11, 29.
doi: 10.1186/s13677-022-00298-2 |
| 18 | THEILE M, BAYERLEIN H, NAI R, et al. UAV coverage path planning under varying power constraints using deep reinforcement learning[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020: 1444-1449. |
| 19 | THEILE M, BAYERLEIN H, NAI R, et al. UAV path planning using global and local map information with deep reinforcement learning[C]//Proc. of the 20th International Conference on Advanced Robotics, 2021: 539-546. |
| 20 | THEILE M, BAYERLEIN H, CACCAMO M, et al. Learning to recharge: UAV coverage path planning through deep reinforcement learning[EB/OL]. [2024-02-05]. https://arxiv.org/abs/2309.03157. |
| 21 | 王宇, 陈海涛, 李海川. 基于引力搜索算法的植保无人机三维路径规划方法[J]. 农业机械学报, 2018, 49 (2): 28-33, 21. |
| WANG Y , CHEN H T , LI H C . 3D path planning approach based on gravitational search algorithm for sprayer UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (2): 28-33, 21. | |
| 22 | WANG H P, LI H Z, ZHANG C, et al. A 3D coverage path planning approach for flying cameras in nature environment under photogrammetric constraints[C]//Proc. of the 36th Chinese Control Conference, 2017: 6761-6766. |
| 23 | WANG H P , ZHANG S Y , ZHANG X Y , et al. Near-optimal 3-D visual coverage for quadrotor unmanned aerial vehicles under photogrammetric constraints[J]. IEEE Trans.on Industrial Electronics, 2021, 69 (2): 1694- 1704. |
| 24 | BIALAS J, DOLLER M. Coverage path planning for unmanned aerial vehicles in complex 3D environments with deep reinforcement learning[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2022: 1080-1085. |
| 25 | BIALAS J, DOELLER M, KATHREIN R. Robust multi- agent coverage path planning for unmanned airial vehicles (UAVs) in complex 3D environments with deep reinforcement learning[C]// Proc. of the IEEE International Conference on Robotics and Biomimetics, 2023. |
| 26 | COOMBES M, CHEN W H, LIU C. Boustrophedon coverage path planning for UAV aerial surveys in wind[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2017: 1563-1571. |
| 27 | COOMBES M , FLETCHER T , CHEN W , et al. Optimal polygon decomposition for UAV survey coverage path planning in wind[J]. Sensors, 2018, 18 (7): 2132. |
| 28 | VASQUEZ J I, GOMEZ C, DE-COTE E M, et al. Multirotor UAV coverage planning under wind conditions[C]//Proc. of the International Conference on Mechatronics, Electronics and Automotive Engineering, 2016: 32-37. |
| 29 | QIAN L , LIU H H T . Path-following control of a quadrotor UAV with a cable-suspended payload under wind disturbances[J]. IEEE Trans.on Industrial Electronics, 2019, 67 (3): 2021- 2029. |
| 30 | PU O , YUAN B Q , LI Z N , et al. Research on wind field visualization based on UAV wind measurement method[J]. Measurement Science and Technology, 2023, 35 (2): 025801. |
| 31 | DI F C , BUTTAZZO G . Coverage path planning for UAVs photogrammetry with energy and resolution constraints[J]. Journal of Intelligent & Robotic Systems, 2016, 83 (3/4): 445- 462. |
| 32 | 齐立哲, 华中伟, 苏昊, 等. 面向荒漠复杂地形的机器人在线全覆盖路径规划方法[J]. 控制与决策, 2024, 39 (4): 1095- 1103. |
| QI L Z , HUA Z W , SU H , et al. Robot online fully coverage path planning algorithm for desert complex terrain[J]. Control and Decision, 2024, 39 (4): 1095- 1103. | |
| 33 | 阮贵航, 陈教料, 胥芳. 基于滚动优化和分散捕食者猎物模型的全覆盖路径规划算法[J]. 控制与决策, 2023, 38 (9): 2545- 2553. |
| RUAN G H , CHEN J L , XU F . Complete coverage path planning algorithm based on rolling optimization and decentralized predator-prey model[J]. Control and Decision, 2023, 38 (9): 2545- 2553. | |
| 34 | CABREIRA T M, FERREIRA P R, DI F C, et al. Grid-based coverage path planning with minimum energy over irregular-shaped areas with UAVs[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2019: 758-767. |
| [1] | Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests [J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631. |
| [2] | Xiaowei YAN, Chong LING, Shengbin SHI. Design and implementation of a rapid detection system for surface unexploded submunitions [J]. Systems Engineering and Electronics, 2025, 47(8): 2639-2645. |
| [3] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Attack-defense confrontation strategy of multi-UAV based on APIQ algorithm [J]. Systems Engineering and Electronics, 2025, 47(7): 2205-2215. |
| [4] | Xiaozhen YAN, Xinyue ZHOU, Qinghua LUO. Improved A-star algorithm for dynamic path planning of unmanned ships [J]. Systems Engineering and Electronics, 2025, 47(7): 2314-2328. |
| [5] | Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial [J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338. |
| [6] | Yunfeng HE, Xianjun SHI, Jianhua LU, Chaolun ZHAO, Guorong ZHAO. Multi-UAV grouping formation control based on synchronous DMPC under fault conditions [J]. Systems Engineering and Electronics, 2025, 47(7): 2357-2370. |
| [7] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879. |
| [8] | Yijie LIU, Bin JIANG, Yajie MA, Wenbo LI, Chengrui LIU. Collision avoidance path planning and re-planning for USV formation [J]. Systems Engineering and Electronics, 2025, 47(6): 1964-1974. |
| [9] | Ruijing CUI, Jianbin SUN, GKewei YAN, Minghao LI. Construction method of equipment operational test indicator system based on UAF [J]. Systems Engineering and Electronics, 2025, 47(5): 1536-1550. |
| [10] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [11] | Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction [J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234. |
| [12] | Zeyang YIN, Hao LIANG, Yuxin LIAO, Xiaofang CHEN, Yongfang XIE. UAV formation path planning based on reachable envelope analysis of dynamic obstacle [J]. Systems Engineering and Electronics, 2025, 47(4): 1275-1284. |
| [13] | Shipei ZOU, Yuhui WANG, Hongrui LIU. Multi-round attack and defense game decision-making of UAVs based on RF-XGBoost algorithm [J]. Systems Engineering and Electronics, 2025, 47(2): 518-526. |
| [14] | Zhongjie YIN, Bo HOU, Xiaolong JIN, Zhiliang FAN, Haiyang WANG. Covert spoofing method for anti-jamming UAV with array antenna [J]. Systems Engineering and Electronics, 2025, 47(2): 633-640. |
| [15] | Jinxin LIU, Wei SHENG, Yumin ZHANG. Optimization algorithm for UAV formation consensus based on motion constraint [J]. Systems Engineering and Electronics, 2025, 47(1): 230-243. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||