Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (10): 3288-3299.doi: 10.12305/j.issn.1001-506X.2025.10.16
• Systems Engineering • Previous Articles
UAV many-to-one pursuit-evasion game based on ME-DDPG algorithm
Yaozhong ZHANG1,*, Zhuoran WU1, Jiandong ZHANG1, Qiming YANG1, Guoqing SHI1, Zixiang XU2
- 1. School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710072,China
2. Tianjin Institute of Industrial Biotechnology,Chinese Academy of Sciences,Tianjin 300308,China
-
Received:2023-12-11Online:2025-10-25Published:2025-10-23 -
Contact:Yaozhong ZHANG
CLC Number:
Cite this article
Yaozhong ZHANG, Zhuoran WU, Jiandong ZHANG, Qiming YANG, Guoqing SHI, Zixiang XU. UAV many-to-one pursuit-evasion game based on ME-DDPG algorithm[J]. Systems Engineering and Electronics, 2025, 47(10): 3288-3299.
share this article
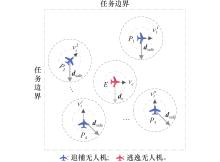
Fig.1
Many-to-one pursuit-evasion game of unmanned aerial vehicle"
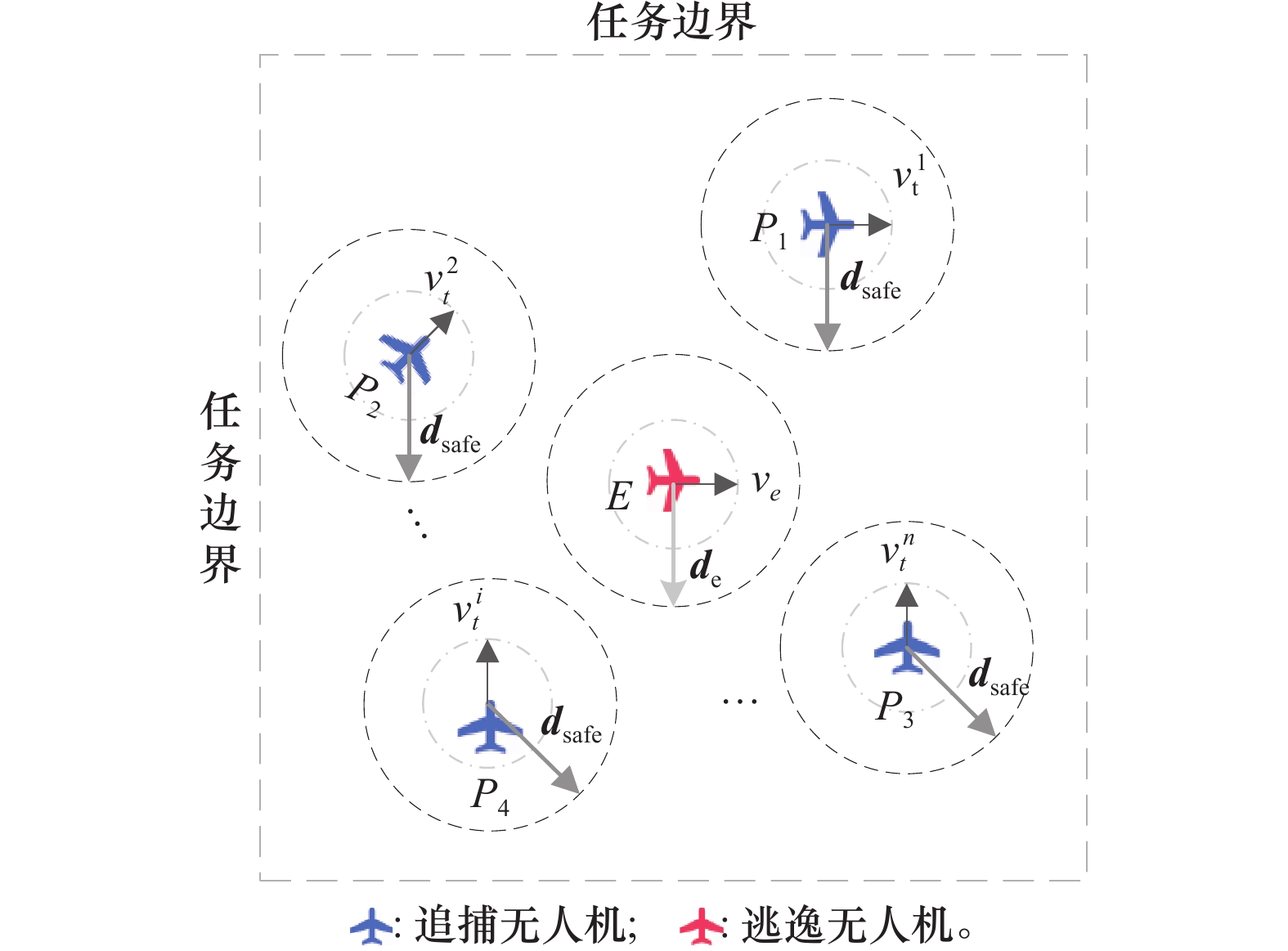

Fig.2
Kinematic state of unmanned aerial vehicle"
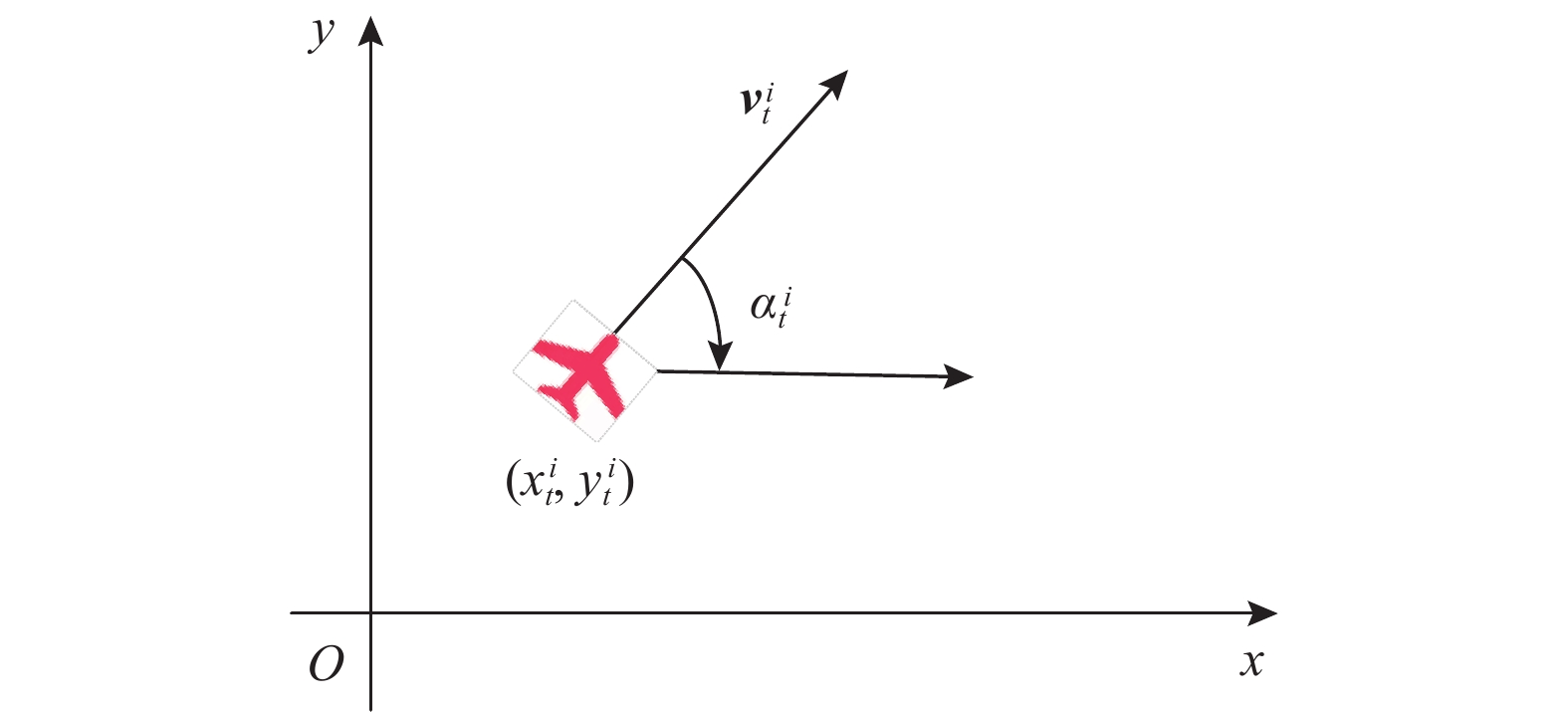
Fig.3
Apollonius circle"
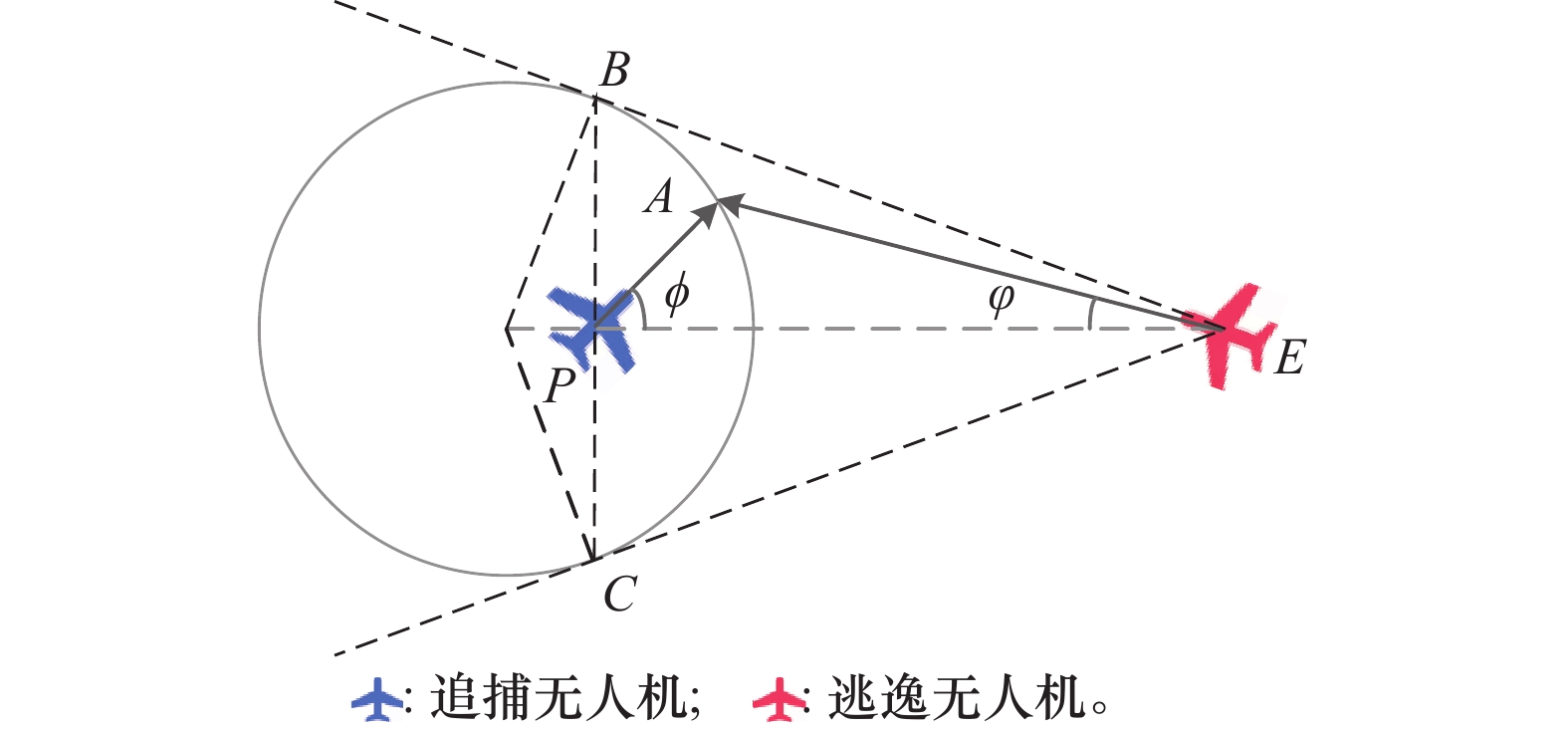
Fig.4
Unmanned aerial vehicles successfully pursuing the escaper"
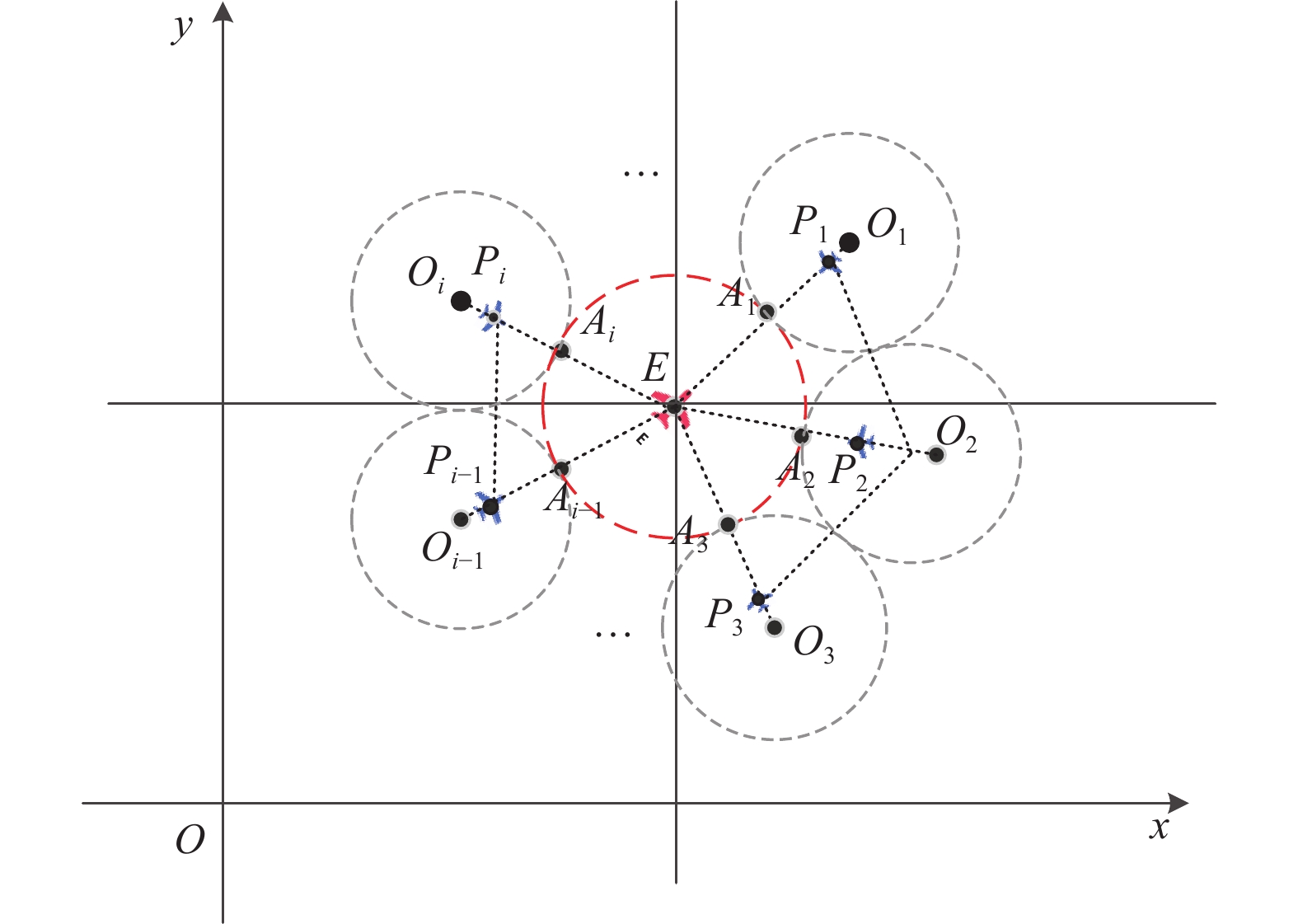

Fig.5
Escape direction of escaping unmanned aerial vehicle"
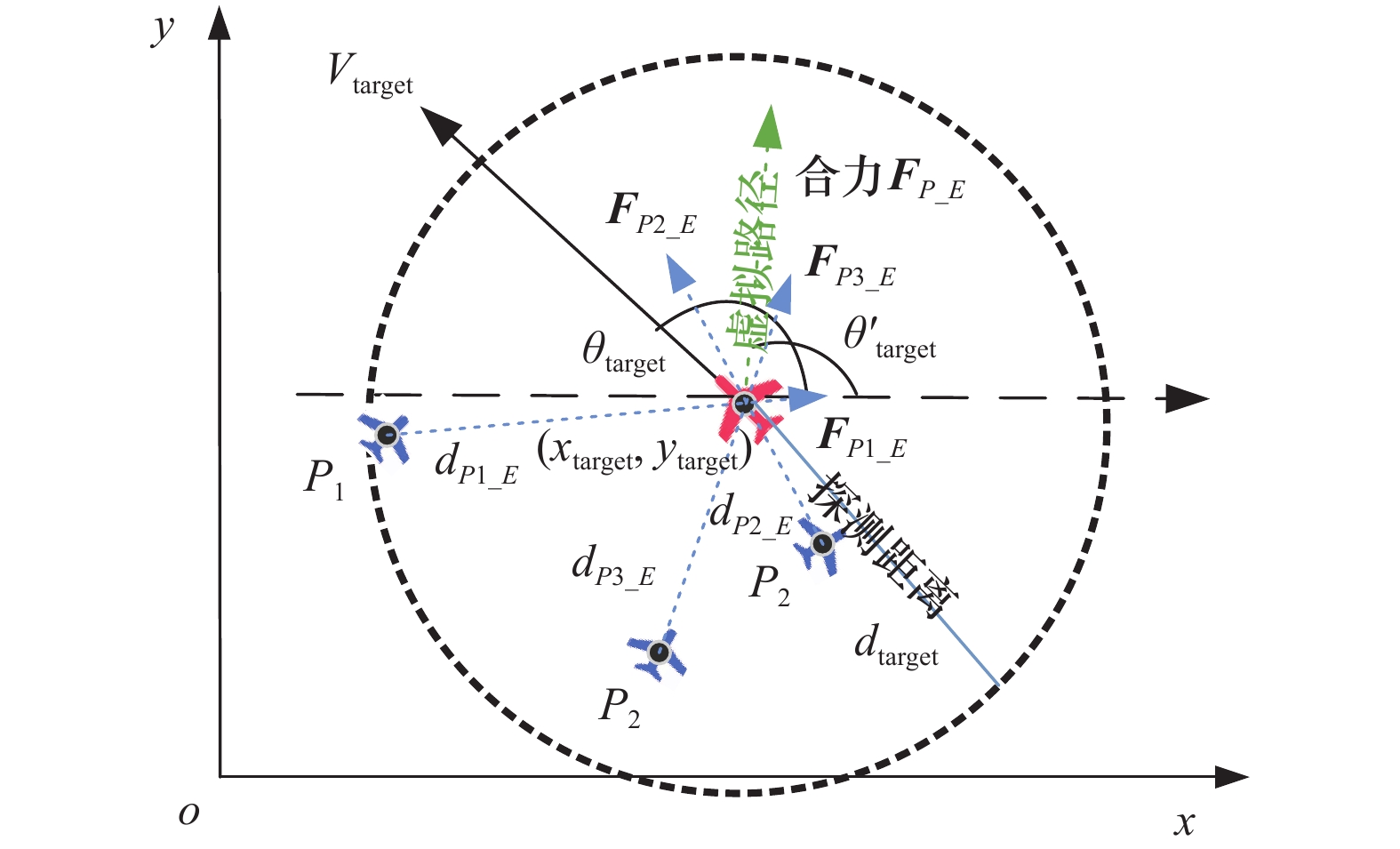

Fig.6
Network structure of DDPG algorithm"
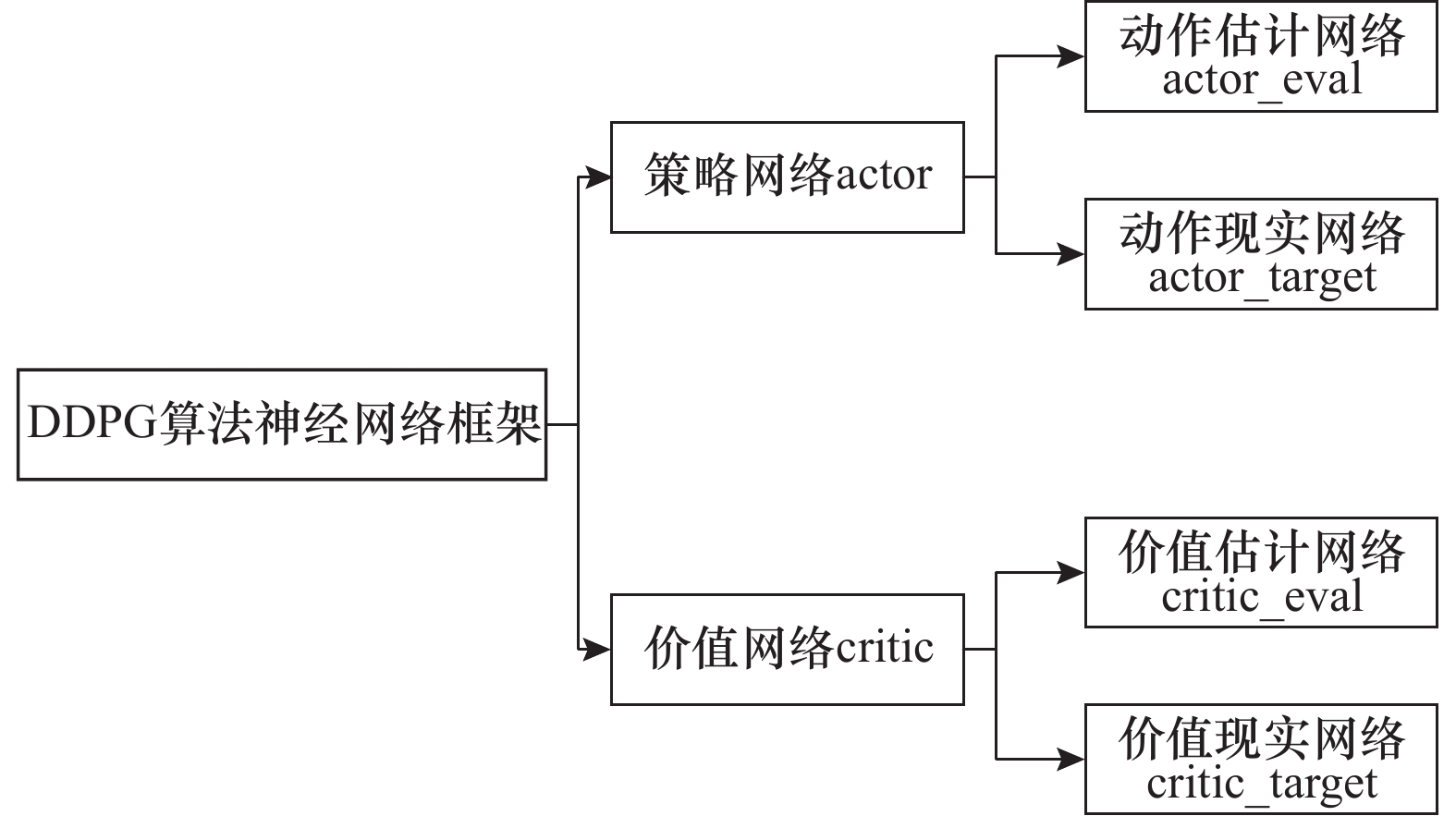
Fig.7
Framework of ME-DDPG algorithm"
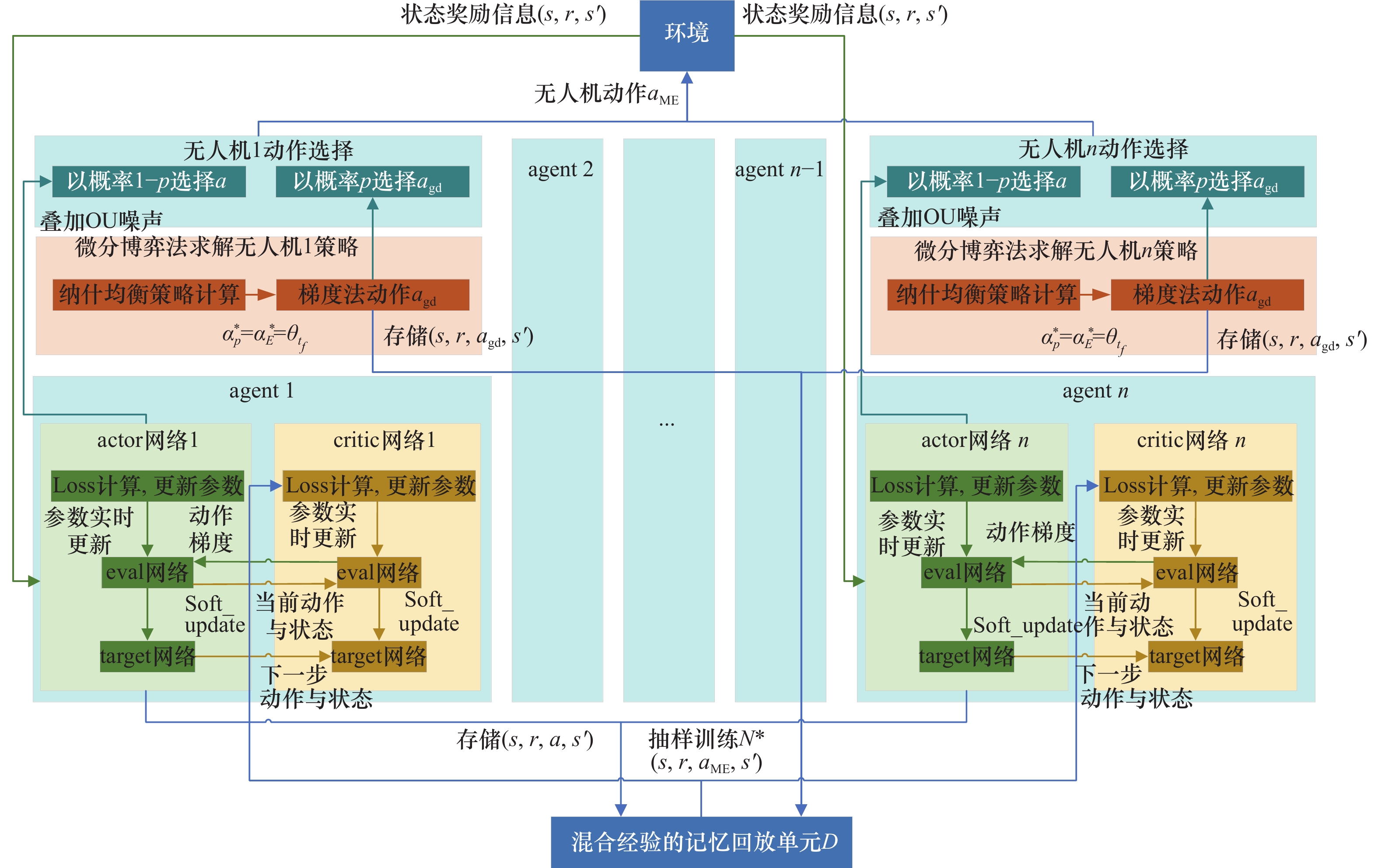
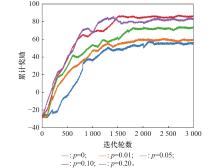
Fig.8
Cumulative reward curve for each turn at different $ p $ values"
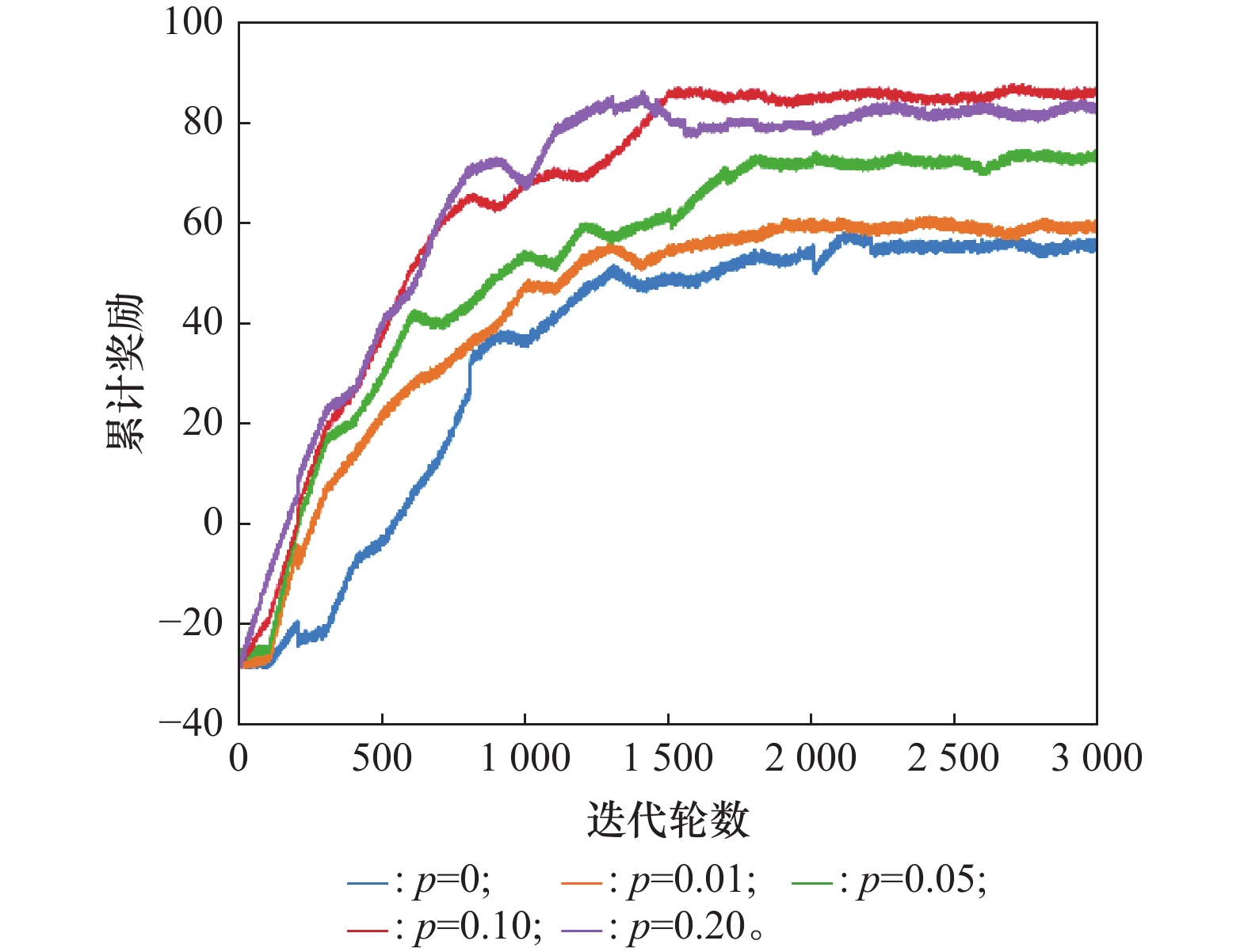
Table 1
Successful capture rates and average reward values for different ${\boldsymbol{p}}$ values"
| 追捕成功率 | 平均奖励值 | |
| 0 | 0.714 | 51.694 |
| 0.01 | 0.749 | 57.653 |
| 0.05 | 0.784 | 61.583 |
| 0.10 | 0.822 | 69.159 |
| 0.20 | 0.801 | 68.984 |
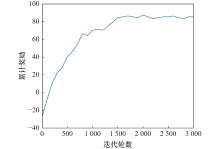
Fig.9
Cumulative reward curve of pursuit unmanned aerial vehicles"
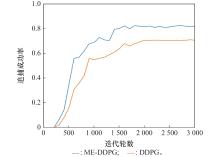
Fig.10
Comparison of success rate of different algorithms in pursuit with different number of training rounds"
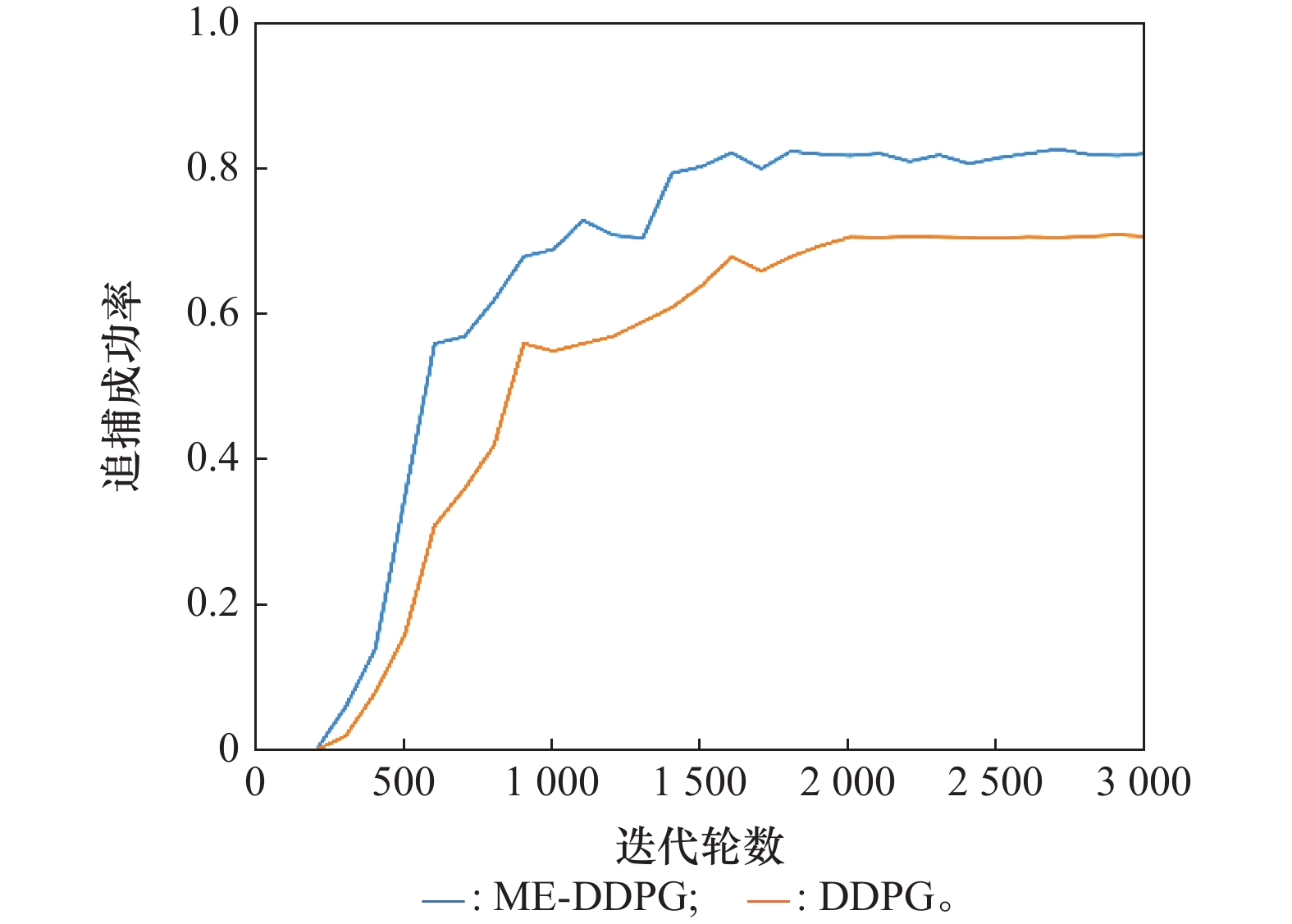

Fig.11
Movement trajectory of unmanned aerial vehicles 3vs1 pursuit-evasion game for different strategies"
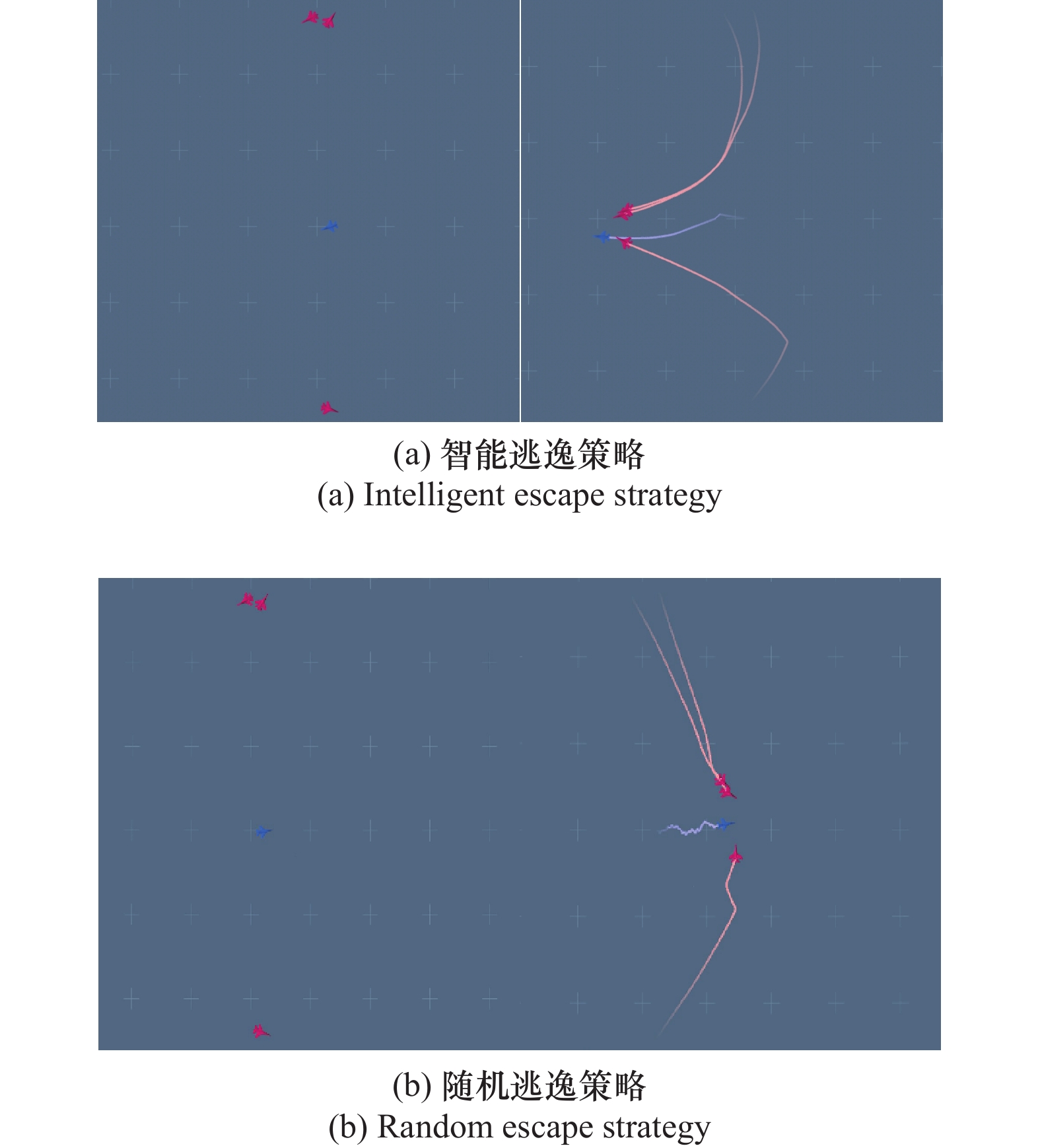

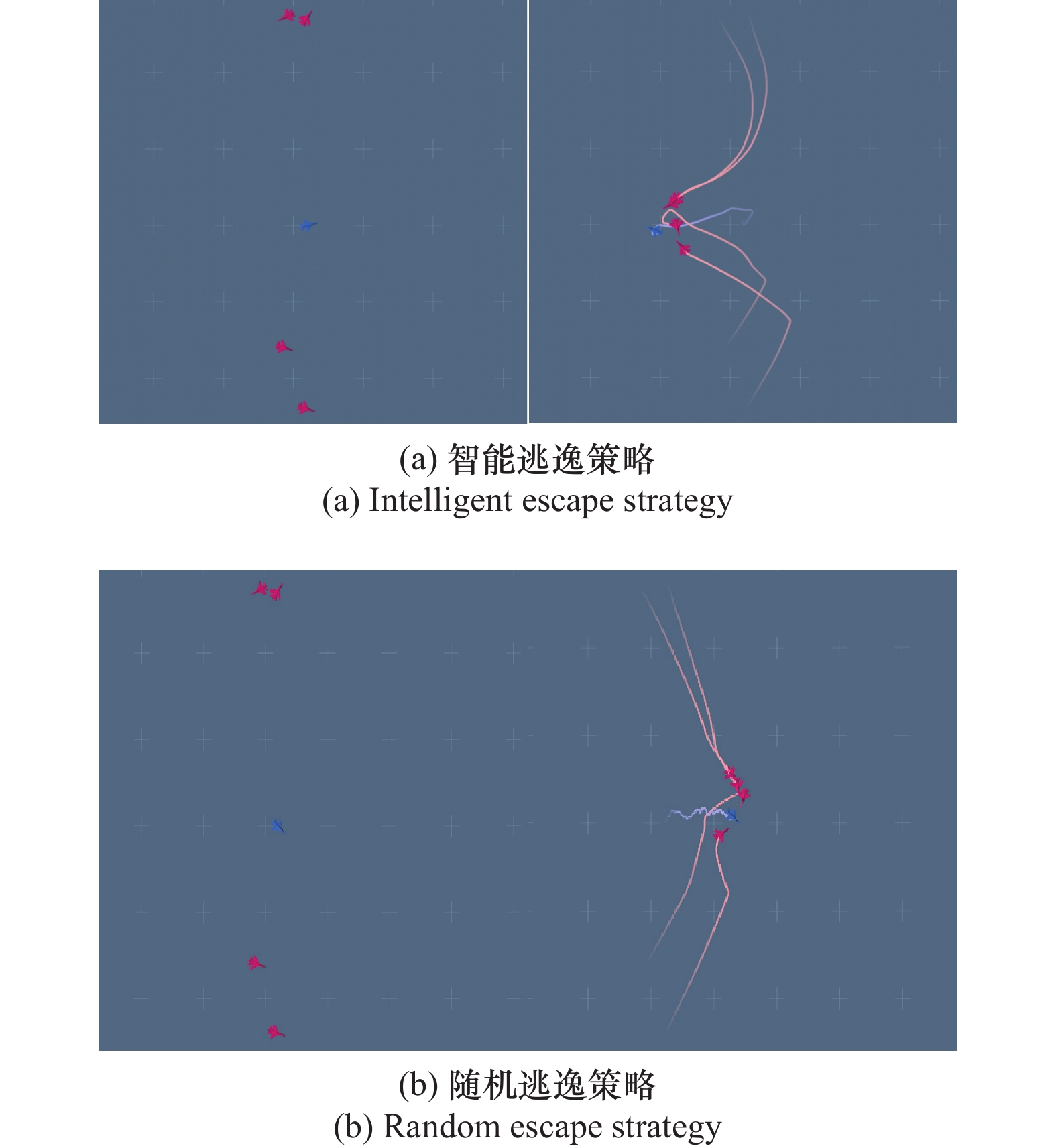
Fig.12
Movement trajectory of unmanned aerial vehicles 4vs1 pursuit-evasion game for different strategies"
| 29 | WANG Y Y, WANG X, ZHOU W X, et al. Threat potential field based pursuit-evasion games for under actuated unmanned surface vehicles[J]. Ocean Engineering, 2023, 285(Part 2): 115381. |
| 30 | DANKWA S, ZHENG W. Twin-delayed ddpg: a deep reinforcement learning technique to model a continuous movement of an intelligent robot agent[C]//Proc. of the 3rd International Conference on Vision, Image and Signal Processing, 2019. |
| 31 | ALACAOGLU A, VIANO L, HE N, et al. A natural actor-critic framework for zero-sum Markov games[C]//Proc. of the 39th International Conference on Machine Learning, 2022: 307−366. |
| 32 | DUAN J, GUAN Y, LI S E, et al. Distributional soft actor-critic: off-policy reinforcement learning for addressing value estimation errors[J]. IEEE Trans. on Neural Networks and Learning Systems, 2021, 33 (11): 6584- 6598. |
| 33 | HUANG Z Q, HUA G Y, WANG J Y, et al. Exploration strategy improved DDPG for lane keeping tasks in autonomous driving[C]//Proc. of the 2nd International Conference on Artificial Intelligence, Automation and Algorithms, 2022: 012020. |
| 34 | ICARTE R T, KLASSEN T Q, VALENZANO R, et al. Reward machines: exploiting reward function structure in reinforcement learning[EB/OL]. [2023-11-11]. https://arxiv.org/abs/2010.03950. |
| 1 | EMIMI M, KHALEEL M, ALKRASH A. The current opportunities and challenges in drone technology[J]. International Journal of Electrical Engineering and Sustainability, 2023, 1 (3): 74- 89. |
| 2 |
ZHANG R L, ZONG Q, ZHANG X Y, et al. Game of drones: multi-UAV pursuit-evasion game with online motion planning by deep reinforcement learning[J]. IEEE Trans. on Neural Networks and Learning Systems, 2023, 34 (10): 7900- 7909.
doi: 10.1109/TNNLS.2022.3146976 |
| 3 | CHAPPELL A R. Knowledge-based reasoning in the Paladin tactical decision generation system[C]//Proc. of the 11th Digital Avionics Systems Conference, 1992: 155−160. |
| 4 | TENG T H, TAN A H, TAN Y S, et al. Self-organizing neural networks for learning air combat maneuvers[C]//Proc. of the International Joint Conference on Neural Networks, 2012. |
| 5 | BATHER J A. Differential games: a mathematical theory with applications to warfare and pursuit, control and optimization[J]. Wiley, 1966, 129 (3): 474- 475. |
| 6 | 左家亮, 杨任农, 张滢, 等. 基于启发式强化学习的空战机动智能决策[J]. 航空学报, 2017, 38 (10): 321168. |
| ZUO J L, YANG R N, ZHANG Y, et al. Intelligent decision-making in air combat maneuvering based on heuristic reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38 (10): 321168. | |
| 7 | 王炫, 王维嘉, 宋科璞, 等. 基于进化式专家系统树的无人机空战决策技术[J]. 兵工自动化, 2019, 38 (1): 48- 53. |
| WANG X, WANG W J, SONG K P, et al. UAV air combat decision technology based on evolutionary expert system tree[J]. Ordnance Industry Automation, 2019, 38 (1): 48- 53. | |
| 8 | 张宏鹏, 黄长强, 轩永波, 等. 基于深度神经网络的无人作战飞机自主空战机动决策[J]. 兵工学报, 2020, 41 (8): 1613- 1622. |
| ZHANG H P, HUANG C Q, XUAN Y B, et al. Autonomous air combat maneuver decision of unmanned combat aircraft based on deep neural networks[J]. Acta Armamentarii, 2020, 41 (8): 1613- 1622. | |
| 9 |
DONG B, FENG Z A, CUI Y M, et al. Event-triggered adaptive fuzzy optimal control of modular robot manipulators using zero-sum differential game through value iteration[J]. International Journal of Adaptive Control and Signal Processing, 2023, 37 (9): 2364- 2379.
doi: 10.1002/acs.3642 |
| 10 |
ZHANG Y Q, ZHANG P F, WANG X D, et al. An open loop Stackelberg solution to optimal strategy for UAV pursuit-evasion game[J]. Aerospace Science and Technology, 2022, 129, 107840.
doi: 10.1016/j.ast.2022.107840 |
| 11 | WANG X, WEI Q L, LI T, et al. Optimal strategy for aircraft pursuit-evasion games via self-play iteration[EB/OL]. [2023-11-12]. http://doi.org/10.1007/s11633-022-1413-5. |
| 12 | GARCIA E, CASBEER D W, PACHTER M. Active target defence differential game: fast defender case[J]. IET Control Theory & Applications, 2017, 11 (17): 2985- 2993. |
| 13 | 魏慎娜. 基于新型态势函数的空战微分博弈问题研究[D]. 沈阳: 沈阳航空航天大学, 2018. |
| WEI S N. Research on differential game problem of air combat based on new situation function[D]. Shenyang: Shenyang University of Aeronautics and Astronautics, 2018. | |
| 14 |
李守义, 陈谋, 王玉惠, 等. 非完备策略集下人机对抗空战决策方法[J]. 中国科学: 信息科学, 2022, 52 (12): 2239- 2253.
doi: 10.1360/SSI-2022-0222 |
|
LI S Y, CHEN M, WANG Y H, et al. Human-computer gaming decision-making method in air combat under an incomplete strategy set[J]. SCIENTIA SINICA Informationis, 2022, 52 (12): 2239- 2253.
doi: 10.1360/SSI-2022-0222 |
|
| 15 |
HUA X, LIU J, ZHANG J J, et al. An apollonius circle based game theory and Q-learning for cooperative hunting in unmanned aerial vehicle cluster[J]. Computers and Electrical Engineering, 2023, 110, 108876.
doi: 10.1016/j.compeleceng.2023.108876 |
| 16 | ZULUAGA J, LEIDIG J P, TREFFTZ C, et al. Deep reinforcement learning for autonomous search and rescue[C]//Proc. of the National Aerospace and Electronics Conference, 2018: 521−525. |
| 17 |
GONG Z H, XU Y, LUO D L. UAV cooperative air combat maneuvering confrontation based on multi-agent reinforcement learning[J]. Unmanned Systems, 2023, 11 (3): 273- 286.
doi: 10.1142/S2301385023410029 |
| 18 | KURNIAWAN B, VAMPLEW P, PAPASIMEON M, et al. An empirical study of reward structures for actor-critic reinforcement learning in air combat manoeuvring simulation[J]. Lecture Notes in Computer Science, 2019, 11919, 54- 65. |
| 19 | HE G H, KANG M X, JIANG K C. A decision method for simulated confrontation of UAVs based on deep reinforcement learning[C]//Proc. of the 42nd Chinese Control Conference, 2023: 8098−8103. |
| 20 | ZHENG J Q, MA Q H, YANG S J, et al. Research on cooperative operation of air combat based on multi-agent[C]//Proc. of the 2nd International Conference on Human Interaction and Emerging Technologies: Future Applications, 2020: 175−179. |
| 21 | 张建东, 王鼎涵, 杨啟明, 等. 基于分层强化学习的无人机多维空战决策[J]. 兵工学报, 2023, 44 (6): 1547- 1563. |
| ZHANG J D, WANG D H, YANG Q M, et al. Multi-dimensional decision-making for UAV air combat based on hierarchical reinforcement learning[J]. Acta Armamentarii, 2023, 44 (6): 1547- 1563. | |
| 22 | PIPLAI A, ANORUO M, FASAYE K, et al. Knowledge guided two-player reinforcement learning for cyber attacks and defenses[C]//Proc. of the 21st IEEE International Conference on Machine Learning and Applications, 2022: 1342−1349. |
| 23 | ZHANG M, LIU T, CHEN Y Y, et al. A h-D3QN-QMIX design for formation decision in air combat[C]//Proc. of the 42nd Chinese Control Conference, 2023: 5577−5582. |
| 24 |
XIONG H, ZHANG Y. Reinforcement learning-based formation-surrounding control for multiple quadrotor UAVs pursuit-evasion games[J]. ISA Transactions, 2024, 145, 205- 224.
doi: 10.1016/j.isatra.2023.12.006 |
| 25 | 刘冰雁, 叶雄兵, 高勇, 等. 基于分支深度强化学习的非合作目标追逃博弈策略求解[J]. 航空学报, 2020, 41 (10): 348- 358. |
| LIU B Y, YE X B, GAO Y, et al. Strategy solving of non-cooperative target pursuit game based on branch deep reinforcement learning[J]. Chinese Journal of Aeronautics, 2020, 41 (10): 348- 358. | |
| 26 | GARCIA E, CASBEER D W, MOLL A V, et al. Multiple pursuer multiple evader differential games[J]. IEEE Trans. on Automatic Control, 2019, 66 (5): 2345- 2350. |
| 27 |
LIANG X, ZHOU B R, JIANG L P, et al. Collaborative pursuit-evasion game of multi-UAVs based on Apollonius circle in the environment with obstacle[J]. Connection Science, 2023, 35 (1): 2168253.
doi: 10.1080/09540091.2023.2168253 |
| 28 |
SONG F, QIAN B Y, WANG Y. Collision avoidance method of autonomous vehicle based on improved artificial potential field algorithm[J]. Journal of Automobile Engineering, 2021, 235 (14): 3416- 3430.
doi: 10.1177/09544070211014319 |
| [1] | Xiaolong WEI, Yarong WU, Dengkai YAO, Guhao ZHAO. Hierarchical decision-making algorithm for UAV air combat maneuvering based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(9): 2993-3003. |
| [2] | Fangjie GUO, Jing LI, Zhaohui ZHANG. Predefined-time lag consensus for MAS with input delay [J]. Systems Engineering and Electronics, 2025, 47(9): 3041-3046. |
| [3] | Dapeng YANG, Zihao GONG, Xiaoye WANG, Zhengyu GUO, Delin LUO. Research on UAV cooperative interception maneuver decision-making based on multi-agent reinforcement learning [J]. Systems Engineering and Electronics, 2025, 47(9): 3076-3085. |
| [4] | Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests [J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631. |
| [5] | Xiaowei YAN, Chong LING, Shengbin SHI. Design and implementation of a rapid detection system for surface unexploded submunitions [J]. Systems Engineering and Electronics, 2025, 47(8): 2639-2645. |
| [6] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Attack-defense confrontation strategy of multi-UAV based on APIQ algorithm [J]. Systems Engineering and Electronics, 2025, 47(7): 2205-2215. |
| [7] | Yundou ZHU, Haiquan SUN, Xiaoxuan HU. Multi-satellite cooperative imaging task planning method based on pointer network architecture [J]. Systems Engineering and Electronics, 2025, 47(7): 2246-2255. |
| [8] | Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial [J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338. |
| [9] | Junchao TANG, Chunhe HU. Complete coverage path planning for UAVs in 3D terrain and wind field environment [J]. Systems Engineering and Electronics, 2025, 47(7): 2349-2356. |
| [10] | Yunfeng HE, Xianjun SHI, Jianhua LU, Chaolun ZHAO, Guorong ZHAO. Multi-UAV grouping formation control based on synchronous DMPC under fault conditions [J]. Systems Engineering and Electronics, 2025, 47(7): 2357-2370. |
| [11] | Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm [J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879. |
| [12] | Linzhi MENG, Xiaojuan SUN, Yuxin HU, Bin GAO, Guoqing SUN, Wenhao MU. Reinforcement learning task scheduling algorithm for satellite on-orbit processing [J]. Systems Engineering and Electronics, 2025, 47(6): 1917-1929. |
| [13] | Kangjie ZHENG, Xinyu ZHANG, Weisong WANG, Zhensheng LIU. Intelligent ship dynamic autonomous obstacle avoidance decision based on DQN and rule [J]. Systems Engineering and Electronics, 2025, 47(6): 1994-2001. |
| [14] | Shuhan LIU, Tong LI, Fuqiang LI, Chungang YANG. Intent and situation-dual driven anti-jamming communication mechanism for data link [J]. Systems Engineering and Electronics, 2025, 47(6): 2055-2064. |
| [15] | Ruijing CUI, Jianbin SUN, GKewei YAN, Minghao LI. Construction method of equipment operational test indicator system based on UAF [J]. Systems Engineering and Electronics, 2025, 47(5): 1536-1550. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||