Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 234-240.doi: 10.12305/j.issn.1001-506X.2023.01.27
• Guidance, Navigation and Control • Previous Articles
Masreliez-Martin method based robust fractional cubature Kalman filtering algorithm and its applications
Jing MU1, Dongsheng YAN2, Yuanli CAI3,*, Changyuan WANG1
- 1. School of Computer and Science Engineering, Xi'an Technology University, Xi'an 710021, China
2. Beijing Institute of Space Long March Vehicle, Beijing 100076, China
3. Faculty of Electronic and Information Engineering, Xi'an Jiaotong University, Xi'an 710049, China
-
Received:2021-07-20Online:2023-01-01Published:2023-01-03 -
Contact:Yuanli CAI
CLC Number:
Cite this article
Jing MU, Dongsheng YAN, Yuanli CAI, Changyuan WANG. Masreliez-Martin method based robust fractional cubature Kalman filtering algorithm and its applications[J]. Systems Engineering and Electronics, 2023, 45(1): 234-240.
share this article
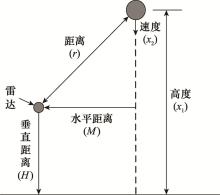
Fig.1
Geometry of RBT and radar"
Fig.2
RMSE of target position estimation"
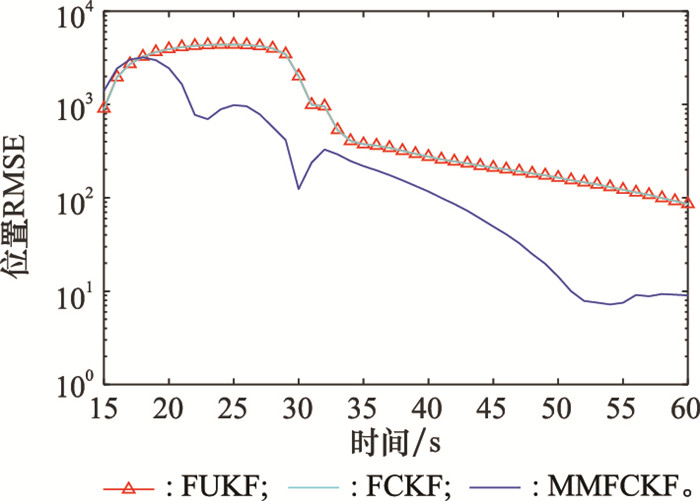

Fig.3
RMSEs of target velocity estimation"
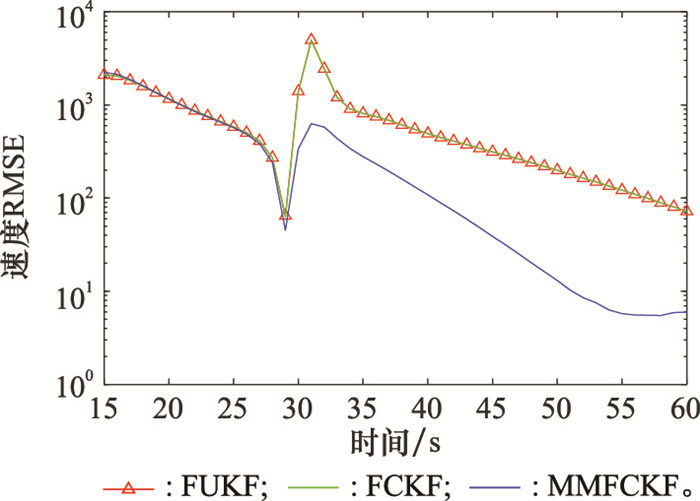
Fig.4
RMSEs of target ballistic coefficient"

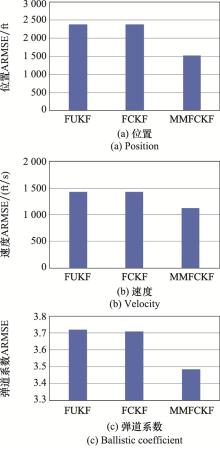
Fig.5
Target ARMSEs of different algorithms"
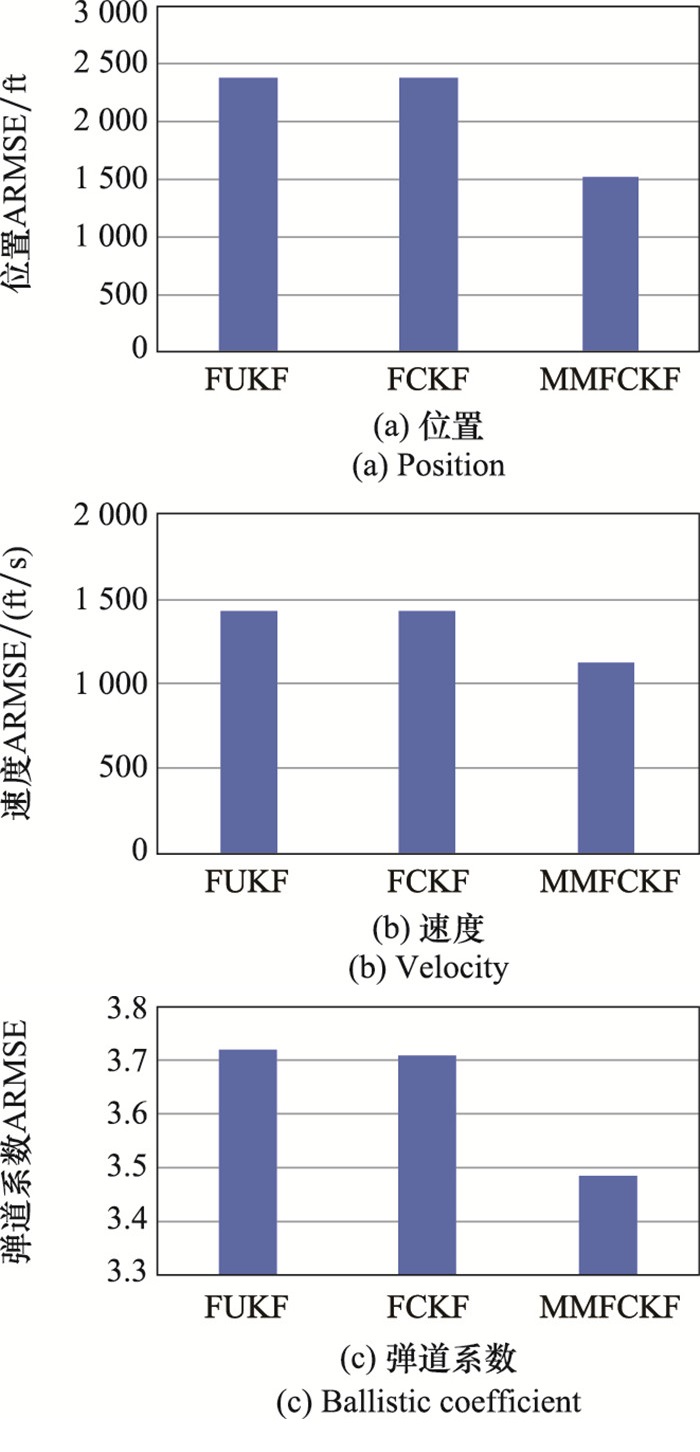
Fig.6
Target position RMSEs for MMFCKF with various $ \boldsymbol{\epsilon}$"
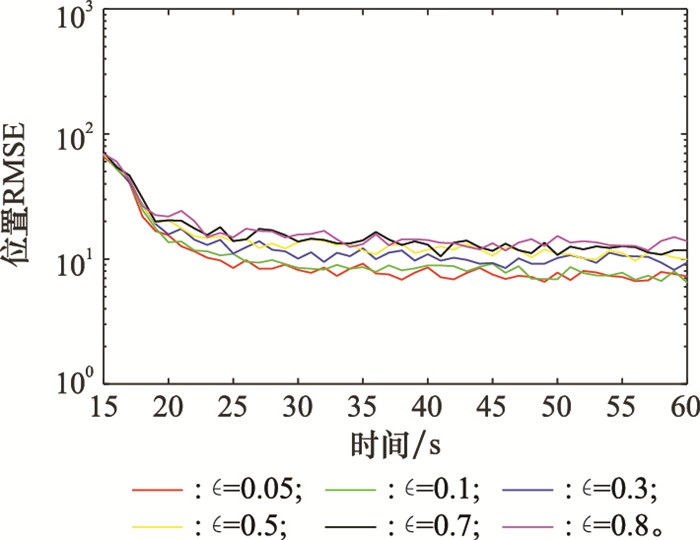
Fig.7
Target velocity RMSEs for MMFCKF with various $ \boldsymbol{\epsilon}$"
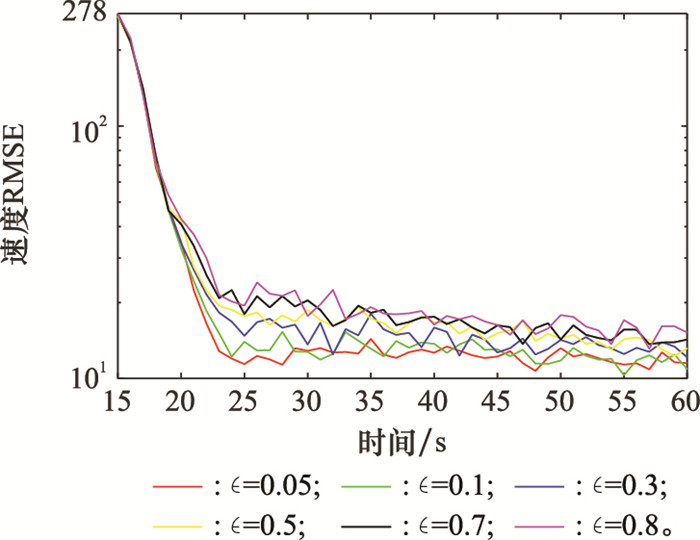
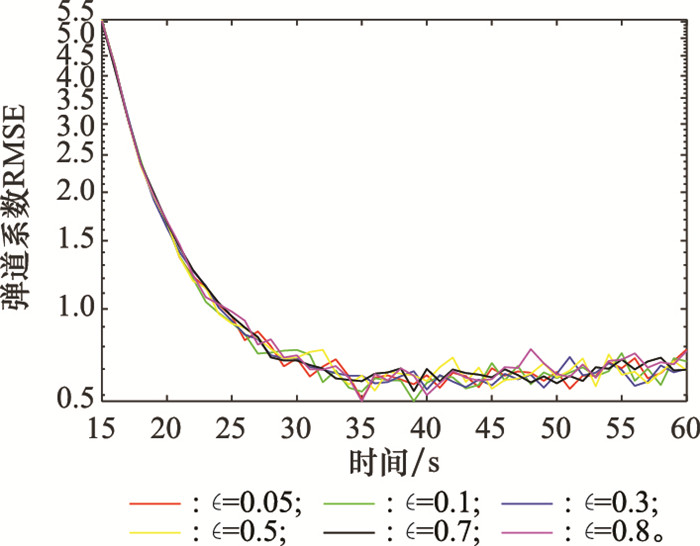
Fig.8
Target ballistic coefficient RMSEs for MMFCKF with various $ \boldsymbol{\epsilon}$"
| 1 |
JULIER S , UHLMANN J , DURRANT-WHYTE H F . A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Trans.on Automatic Control, 2000, 45 (3): 477- 482.
doi: 10.1109/9.847726 |
| 2 |
NϕRGAARD M , POULSEN N K , RAVN O . New developments in state estimation for nonlinear systems[J]. Automatica, 2000, 36 (11): 1627- 1638.
doi: 10.1016/S0005-1098(00)00089-3 |
| 3 |
ARASARATNAM I , HAYKIN S . Cubature Kalman filters[J]. IEEE Trans.on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 4 |
SUN Y B , ZHAO Y G . Distributed cubature Kalman filter with performance comparison for large-scale power systems[J]. International Journal of Control Automation and Systems, 2021, 19 (3): 1319- 1327.
doi: 10.1007/s12555-019-1054-9 |
| 5 |
ZHANG X , YAN Z B , CHEN Y Q . High-degree cubature Kalman filter for nonlinear state estimation with missing measurements[J]. Asian Journal of Control, 2022, 24 (3): 1261- 1272.
doi: 10.1002/asjc.2510 |
| 6 |
ZHU B , CHANG L B , XU J N , et al. Huber-based adaptive unscented Kalman filter with non-Gaussian measurement noise[J]. Circuits Systems and Signal Processing, 2018, 37 (9): 3842- 3861.
doi: 10.1007/s00034-017-0736-x |
| 7 | 张文杰, 王世元, 冯亚丽, 等. 基于Huber的高阶容积卡尔曼跟踪算法[J]. 物理学报, 2016, 65 (8): 358- 366. |
| ZHANG W J , WANG S Y , FENG Y L , et al. Huber-based high-degree cubature Kalman tracking algorithm[J]. Acta Physica Sinica, 2016, 65 (8): 358- 366. | |
| 8 | 彭美康, 郭蕴华, 汪敬东, 等. 基于鲁棒容积卡尔曼滤波的自适应目标跟踪算法[J]. 控制理论与应用, 2020, 37 (4): 793- 800. |
| PENG M K , GUO Y H , WANG J D , et al. Adaptive target tracking algorithm based on robust cubature Kalman filter[J]. Control Theory & Applications, 2020, 37 (4): 793- 800. | |
| 9 |
秦康, 董新民, 陈勇, 等. 基于Huber的鲁棒广义高阶容积卡尔曼滤波算法[J]. 控制与决策, 2018, 33 (1): 88- 94.
doi: 10.13195/j.kzyjc.2016.1445 |
|
QIN K , DONG X M , CHEN Y , et al. Huber-based robust generalized high-degree cubature Kalman filter[J]. Control and Decision, 2018, 33 (1): 88- 94.
doi: 10.13195/j.kzyjc.2016.1445 |
|
| 10 | STOJANOVIC V , NEDIC N . Robust Kalman filtering for nonli- near multivariable stochastic systems in the presence of non-Gaussian noise[J]. International Journal of Robust & Nonlinear Control, 2016, 26 (3): 445- 460. |
| 11 |
LI W L , SUN S H , JIA Y M , et al. Robust unscented Kalman filter with adaptation of process and measurement noise cova-riances[J]. Digital Signal Processing, 2016, 48, 93- 103.
doi: 10.1016/j.dsp.2015.09.004 |
| 12 | SIEROCIUK D , DZIELINSKI A . Fractional Kalman filter algorithm for the states, parameters and order of fractional system estimation[J]. International Journal of Applied Mathematics and Computer Science, 2006, 16 (1): 129- 140. |
| 13 | 刘彦, 蒲亦菲, 沈晓东, 等. 分数阶Unscented卡尔曼滤波器研究[J]. 电子与信息学报, 2012, 34 (6): 1388- 1392. |
| LIU Y , PU Y F , SHEN X D , et al. Fractional Unscented Kalman filter[J]. Journal of Electronics & Information Technology, 2012, 34 (6): 1388- 1392. | |
| 14 | TORABI H , PARIZ N , KARIMPOUR A . A novel cubature statistically linearized Kalman filter for fractional-order nonlinear discrete-time stochastic systems[J]. Journal of Vibration & Control, 2018, 24 (24): 5880- 5897. |
| 15 |
RAMEZANI A , SAFARINEJADIAN B , ZAREI J . Novel hybrid robust fractional interpolatory cubature Kalman filters[J]. Journal of the Franklin Institute, 2020, 357 (1): 704- 725.
doi: 10.1016/j.jfranklin.2019.11.002 |
| 16 |
LIU T Y , CHENG S S , WEI Y H , et al. Fractional central difference Kalman filter with unknown prior information[J]. Signal Processing, 2019, 154, 294- 303.
doi: 10.1016/j.sigpro.2018.08.006 |
| 17 |
LIU T Y , WEI Y H , YIN W D , et al. State estimation for nonlinear discrete-time fractional systems: a Bayesian perspective[J]. Signal Processing, 2019, 165, 250- 261.
doi: 10.1016/j.sigpro.2019.06.037 |
| 18 |
TRIPATHI R P , SINGH A K , GANGWAR P . Innovation-based fractional order adaptive Kalman filter[J]. Journal of Electrical Engineering, 2020, 71 (1): 60- 64.
doi: 10.2478/jee-2020-0009 |
| 19 |
RAMEZANIL A , SAFARINEJADIANL B . A modified fractional-order unscented Kalman filter for nonlinear fractional-order systems[J]. Circuits, Systems, and Signal Processing, 2018, 37 (9): 3756- 3784.
doi: 10.1007/s00034-017-0729-9 |
| 20 | 孙永辉, 高振阳, 卫志农, 等. 一种考虑非高斯Lévy量测噪声下的改进分数阶卡尔曼滤波[J]. 控制与决策, 2016, 31 (3): 547- 550. |
| SUN Y H , GAO Z Y , WEI Z N , et al. An improved Kalman filter for fractional order system with non-Gaussian measurement Lévy noise[J]. Control and Decision, 2016, 31 (3): 547- 550. | |
| 21 |
RAMEZANI A , SAFARINJADIAN B , ZAREI J . Fractional order chaotic cryptography in colored noise environment by using fractional order interpolatory cubature Kalman filter[J]. Transactions of the Institute of Measurement and Control, 2019, 41 (11): 3206- 3222.
doi: 10.1177/0142331218822721 |
| 22 | 高哲, 黄晓敏, 陈小姣. 含分数阶有色关联噪声的分数阶系统的卡尔曼滤波器设计[J]. 控制与决策, 2021, 36 (7): 1672- 1678. |
| GAO Z , HUANG X M , CHENG X J . Design of Kalman filter for fractional-order systems with correlated fractional-order colored noises[J]. Control and Decision, 2021, 36 (7): 1672- 1678. | |
| 23 |
GAO Z . Fractional-order Kalman filters for continuous-time fractional-order systems involving colored process and measurement noises[J]. Journal of the Franklin Institute, 2018, 355 (2): 922- 948.
doi: 10.1016/j.jfranklin.2017.11.037 |
| 24 |
GAO Z , LIU Y T , YANG C , et al. Unscented Kalman filter for continuous-time nonlinear fractional-order systems with process and measurement noises[J]. Asian Journal of Control, 2020, 22 (5): 1961- 1972.
doi: 10.1002/asjc.2077 |
| 25 |
LIU F H , GAO Z , YANG C , et al. Extended Kalman filters for continuous-time nonlinear fractional-order systems involving correlated and uncorrelated process and measurement noises[J]. International Journal of Control Automation and Systems, 2020, 18 (9): 2229- 2241.
doi: 10.1007/s12555-019-0353-5 |
| 26 |
GAO Z . Cubature Kalman filters for nonlinear continuous-time fractional-order systems with uncorrelated and correlated noises[J]. Nonlinear Dynamics, 2019, 96, 1805- 1817.
doi: 10.1007/s11071-019-04885-y |
| 27 |
YANG C , GAO Z , MIAO Y , et al. Study on initial value problem for fractional-order cubature Kalman filters of nonlinear continuous-time fractional-order systems[J]. Nonlinear Dynamics, 2021, 105 (3): 2387- 2403.
doi: 10.1007/s11071-021-06726-3 |
| 28 | YANG C , GAO Z , LI X N , et al. Adaptive fractional-order Kalman filters for continuous-time nonlinear fractional-order systems with unknown parameters and fractional-orders[J]. International Journal of Systems Science, 2021, 52 (13): 2777- 2797. |
| 29 | DALIR M , BASHOUR M . Applications of fractional calculus[J]. Applied Mathematical Sciences, 2010, 4 (21): 1021- 1032. |
| 30 | DAS M , DEY A , SADHU S , et al. Adaptive central difference filter for non-linear state estimation[J]. IET Science, Measurement & Technology, 2015, 9 (6): 728- 733. |
| 31 | DEY A , DAS M , SADHU S , et al. Adaptive divided difference filter for parameter and state estimation of non-linear systems[J]. IET Signal Processing, 2015, 9 (4): 369- 376. |
| 32 | MONJE C A , CHEN Y Q , VINAGRE B M , et al. Fractional-order systems and controls[M]. London: Springer-Verlag, 2011. |
| [1] | Haoran LU, Wei ZHENG, Xiaohua CHANG. Fractional order sliding mode guidance law based on robust exact differentiator [J]. Systems Engineering and Electronics, 2023, 45(1): 175-183. |
| [2] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [3] | Tongdian WANG, Jieyu LIU, Zongshou WU, Qiang SHEN, Erliang YAO. Visual-inertial SLAM method based on multi-scale optical flow fusion feature point [J]. Systems Engineering and Electronics, 2022, 44(3): 977-985. |
| [4] | Shuang CONG, Kun ZHANG. Online quantum state estimation optimization algorithm based on Kalman filter [J]. Systems Engineering and Electronics, 2021, 43(6): 1636-1643. |
| [5] | Meibin QI, Jingjing HU, Peilin CHENG, Xueming JIN. Nonlinear extension of δ-generalized labeled multi-Bernoulli filtering algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3571-3578. |
| [6] | Tianqi HUANG, Buhong WANG, Jiwei TIAN. False target deception jamming optimized method for centralized netted radar [J]. Systems Engineering and Electronics, 2020, 42(7): 1484-1490. |
| [7] | Yu LU, Zheng ZHOU. Observation station track optimization of airborne external transmitter location system [J]. Systems Engineering and Electronics, 2020, 42(12): 2708-2715. |
| [8] | Chunming ZHAO, Yueming YAO, Wen JIN, Weiyang SONG, Haihong FANG. Design of terminal guidance system for strapdown passive radar [J]. Systems Engineering and Electronics, 2020, 42(11): 2607-2613. |
| [9] | XU Hong, XIE Wenchong, WANG Yongliang. Gaussian sum cubature Kalman tracking filter with angle glint noise [J]. Systems Engineering and Electronics, 2019, 41(2): 229-235. |
| [10] | LIU Yu, LIU Jun, XU Cong’an, WANG Cong, QI Lin, DING Ziran. Distributed consensus state estimation algorithm in asymmetrical networks [J]. Systems Engineering and Electronics, 2018, 40(9): 1917-1925. |
| [11] | GUO Xiaoting, SUN Changku, WANG Peng. Vision and inertial fusion attitude measurement based on diagonalization of matrix robust QCKF [J]. Systems Engineering and Electronics, 2018, 40(2): 402-408. |
| [12] | LIN Xiaogong, JIAO Yuzhao, LI Heng, LIANG Kun, NIE Jun. Smoothing variable structure filter based on cubature transform and its application [J]. Systems Engineering and Electronics, 2018, 40(1): 159-164. |
| [13] | LEI Junfeng, WANG He, ZHU Li, XIAO Jinsheng. Image super resolution reconstruction algorithm based on fractional calculus [J]. Systems Engineering and Electronics, 2017, 39(12): 2849-2856. |
| [14] | LIU Haibo, WANG Heping, SHENG Liding. Attitude control for vertical take off and landing mode of QTR based on#br# fractional order sliding mode control [J]. Systems Engineering and Electronics, 2017, 39(1): 156-161. |
| [15] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng. Research on moving base initial alignment of SINS/OD with reduced dimension CKF and smoother [J]. Systems Engineering and Electronics, 2016, 38(9): 2135-2141. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||