Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3571-3578.doi: 10.12305/j.issn.1001-506X.2021.12.19
• Sensors and Signal Processing • Previous Articles Next Articles
Nonlinear extension of δ-generalized labeled multi-Bernoulli filtering algorithm
Meibin QI1, Jingjing HU1,*, Peilin CHENG1, Xueming JIN2
- 1. School of Computer and Information, Hefei University of Technology, Hefei 230009, China
2. China Electronics Technology Group Corporation 38th Research Institute, Hefei 230088, China
-
Received:2020-12-10Online:2021-11-24Published:2021-11-30 -
Contact:Jingjing HU
CLC Number:
Cite this article
Meibin QI, Jingjing HU, Peilin CHENG, Xueming JIN. Nonlinear extension of δ-generalized labeled multi-Bernoulli filtering algorithm[J]. Systems Engineering and Electronics, 2021, 43(12): 3571-3578.
share this article
Table 1
Initial state and starting and ending time of different targets"
| 目标 | 起始时刻/s | 结束时刻/s | 目标初始状态 | 转弯频率rad/s |
| 1 | 1 | 100 | [1 000, -10, 1 500, -10]T | π/120 |
| 2 | 1 | 100 | [-250, 20, 1 000, 3]T | π/60 |
| 3 | 10 | 100 | [-1 500, 11, 250, 10]T | -π/120 |
| 4 | 10 | 100 | [1 000, 5, 1 500, -15]T | π/60 |
| 5 | 20 | 80 | [250, -8, 750, -15]T | π/120 |
| 6 | 20 | 100 | [-250, -12, 1 000, -12]T | π/60 |
| 7 | 30 | 90 | [-1 500, 11, 250, -10]T | π/80 |
| 8 | 30 | 80 | [250, -25, 750, 0]T | -π/120 |
| 9 | 40 | 100 | [1 000, -20, 1 500, -10]T | π/120 |
| 10 | 60 | 100 | [250, -5, 750, 20]T | π/120 |
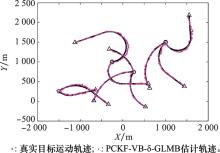
Fig.1
Target tracks and estimated tracks"
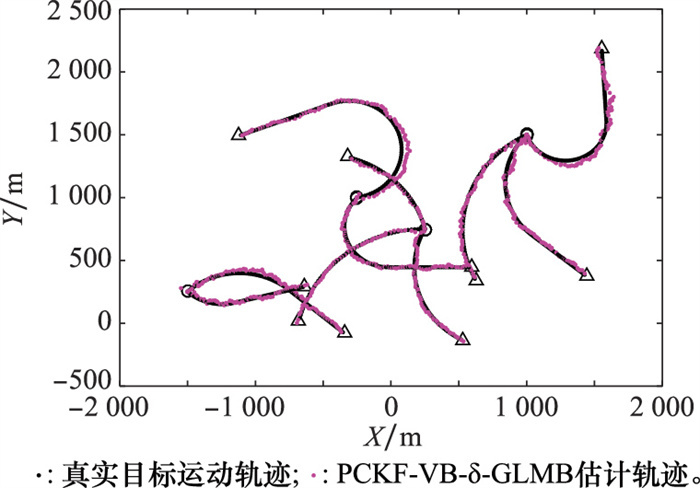

Fig.2
Cardinality estimation"
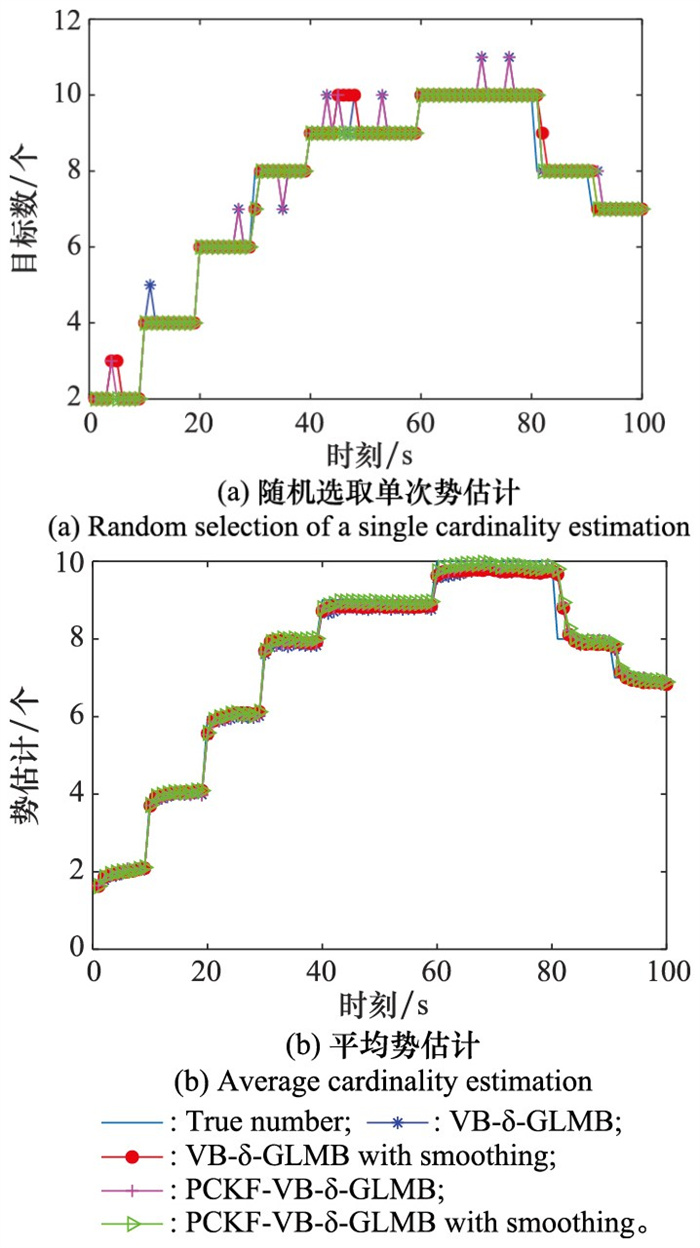
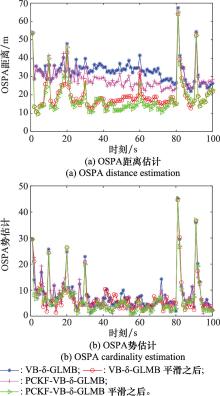
Fig.3
OSPA distance and cardinality estimation"

Table 2
Average performance of 100 simulations"
| 滤波器 | OSPA距离 | OSPA势估计 |
| VB-δ-GLMB | 34.06 | 8.589 |
| VB-δ-GLMB平滑之后 | 20.11 | 7.475 |
| PCKF-VB-δ-GLMB | 29.43 | 7.579 |
| PCKF-VB-δ-GLMB平滑之后 | 18.03 | 6.353 |

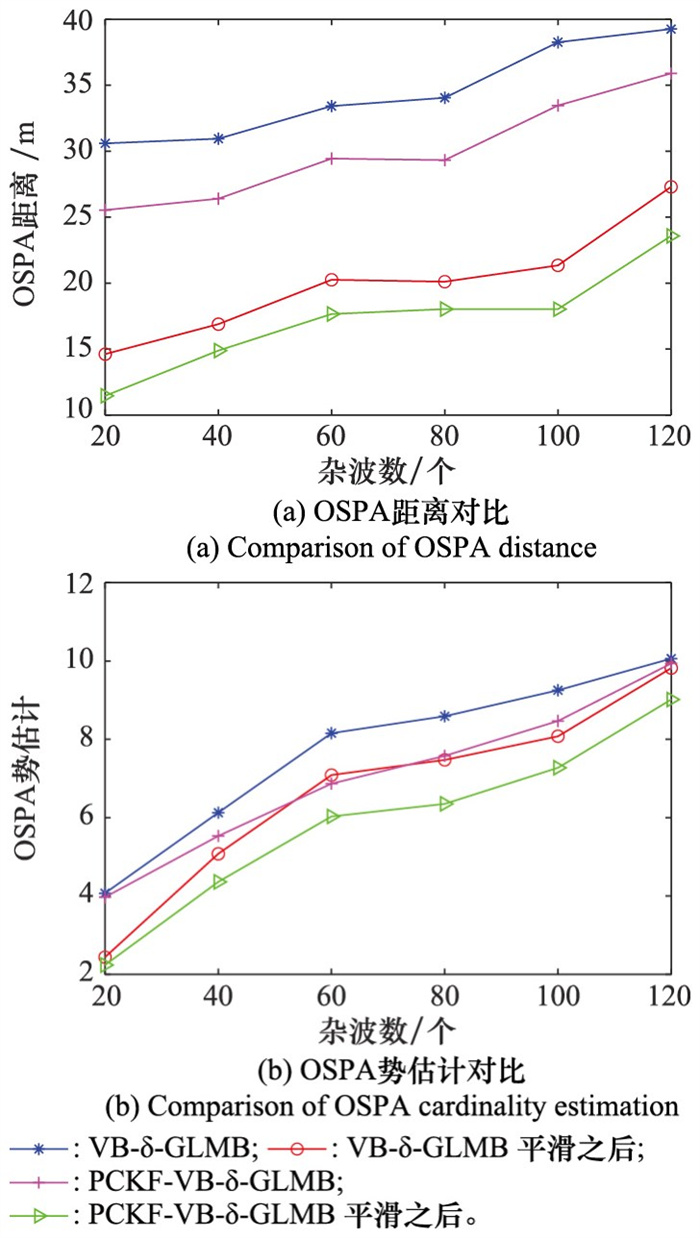
Fig.4
Comparison of OSPA distance and cardinality estimation under different clutter numbers"
| 1 | KOSUGE Y. Maneuvering target tracking using multiple maneuver model joint probabilistic data association[C]//Proc. of the IEEE Industrial Electronics Society Conference, 1991: 2059-2064. |
| 2 | FAN E, XIE W X, LIU Z X, et al. Combinige generalized JDPA and FRLS filter for tracking multiple maneuvering targets[C]//Proc. of the IEEE International Conference on Signal Processing, 2014: 239-245. |
| 3 |
ZHAO S J , WANG Y , WANG P Y , et al. Adaptive non-linear joint probabilistic data association for vehicle target tracking[J]. IEEE Access, 2021, 9, 14138- 14147.
doi: 10.1109/ACCESS.2021.3052555 |
| 4 | WHANG I H, LEE J G. Multiple hypotheses tracking for maneuvering targets in clutter environment[C]//Proc. of the Conference on International Session Papers, 1995: 1493-1498. |
| 5 | BLACKMAN S S . Multiple hypothesis tracking for multiple target tracking[J]. IEEE Aerospace & Electronic Systems Magazine, 2009, 19 (1): 5- 18. |
| 6 | LEXA M, CORALUPPI S, CARTHEL C. Distributed MHT and ML-PMHT approaches to multi-sensor passive sonar tracking[C]//Proc. of the IEEE Aerospace Conference, 2020. |
| 7 | MAHLER R , EBRARY I . Statistical multisource multitarget information fusion[M]. Norwood: Artech House, 2007: 565- 682. |
| 8 |
VO B N , VO B T , PHUNG D . Labeled random finite sets and the bayes multi-target tracking filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (24): 6554- 6567.
doi: 10.1109/TSP.2014.2364014 |
| 9 |
VO B T , VO B N . Labeled random finite sets and multi-object conjugate priors[J]. IEEE Trans.on Signal Processing, 2013, 61 (13): 3460- 3475.
doi: 10.1109/TSP.2013.2259822 |
| 10 | VO B , VO B , HOANG H G . An efficient implementation of the generalized labeled multi-bernoulli filter[J]. IEEE Trans.on Signal Processing, 2016, 65 (8): 1975- 1987. |
| 11 | HOANG H, VO BA N, VO B T. A fast implementation of the generalized labeled multi-Bernoulli filter with joint prediction and update[C]//Proc. of the International Conference on Information Fusion, 2015: 999-1006. |
| 12 |
CAO C H , ZHAO Y B , PANG X J , et al. An efficient implementation of multiple weak targets tracking filter with labeled random finite sets for marine radar[J]. Digital Signal Processing, 2020, 101, 102710.
doi: 10.1016/j.dsp.2020.102710 |
| 13 |
LI C Y , FAN Z H , SHI R Z . A generalized labelled multi-bernoulli filter for extended targets with unknown clutter rate and detection profile[J]. IEEE Access, 2020, 8, 213772- 213782.
doi: 10.1109/ACCESS.2020.3036900 |
| 14 | BEARD M , VO B T , VO B , A solution for large-scale multi-object tracking[J] . IEEE Trans[J]. on Signal Processing, 2020, 68, 2754- 2769. |
| 15 |
SARKKA S , NUMMENMAA A . Recursive noise adaptive kalman filtering by variational Bayesian approximations[J]. IEEE Trans.on Automatic Control, 2009, 54 (3): 596- 600.
doi: 10.1109/TAC.2008.2008348 |
| 16 | LI W L, JIA Y M, DU J P, et al. PHD filter for multi-target tracking by variational Bayesian approximation[C]//Proc. of the IEEE Conference on Decision & Control, 2013: 7815-7820. |
| 17 | ZHANG G, LIAN F, HAN C, et al. An improved PHD filter based on variational Bayesian method for multi-target tracking[C]// Proc. of the 17th International Conference on Information Fusion, 2014. |
| 18 |
YANG J L , GE H W . An improved multi-target tracking algorithm based on CBMeMBer filter and variational Bayesian approximation[J]. Signal Processing, 2013, 93 (9): 2510- 2515.
doi: 10.1016/j.sigpro.2013.03.027 |
| 19 | 袁常顺, 王俊, 向洪, 等. 基于VB近似的自适应δ-GLMB滤波算法[J]. 系统工程与电子技术, 2017, 39 (2): 237- 243. |
| YUAN C S , WANG J , XIANG H , et al. Adaptive δ-GLMB filtering algorithm based on VB approximation[J]. Systems Engineering and Electronics, 2017, 39 (2): 237- 243. | |
| 20 |
WANG S Y , YIN C , DUAN S K , et al. A modified variational bayesian noise adaptive Kalman filter[J]. Circuits Systems and Signal Processing, 2017, 36 (10): 4260- 4277.
doi: 10.1007/s00034-017-0497-6 |
| 21 | 闫文旭, 兰华, 王增福, 等. 基于变分贝叶斯的星载雷达非线性滤波[J]. 航空学报, 2020, 41 (S2): 220- 228. |
| YAN W X , LAN H , WANG Z F , et al. Nonlinear filtering of spaceborne radar Based on variational Bayes[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S2): 220- 228. | |
| 22 |
TSENG P . An analysis of the EM algorithm and entropy-like proximal point methods[J]. Mathematics of Operations Research, 2004, 29 (1): 27- 44.
doi: 10.1287/moor.1030.0073 |
| 23 |
HU Y M , WANG X Z , LAN H , et al. An iterative nonlinear filter using variational Bayesian optimization[J]. Sensors, 2018, 18 (12): 4222.
doi: 10.3390/s18124222 |
| 24 | KHAN M E, BAQUÉ P, FLEURET F, et al. Kullback-Leibler proximal variational inference[C]//Proc. of the Advances in Neural Information Processing Systems, 2015: 3402-3410. |
| 25 |
HE J , SUN C , ZHANG B , et al. Variational Bayesian-based maximum correntropy cubature Kalman filter with both adaptivity and robustness[J]. IEEE Sensors Journal, 2021, 21 (2): 1982- 1992.
doi: 10.1109/JSEN.2020.3020273 |
| 26 |
母晓慧, 杨风暴, 刘哲, 等. 基于均方根容积卡尔曼的δ-GLMB多目标跟踪算法[J]. 计算机应用与软件, 2020, 37 (4): 164- 170.
doi: 10.3969/j.issn.1000-386x.2020.04.027 |
|
MU X H , YANG F B , LIU Z , et al. δ-GLMB filter multi-target tracking algorithm based on square-rooted cubature Kalman[J]. Computer Applications and Software, 2020, 37 (4): 164- 170.
doi: 10.3969/j.issn.1000-386x.2020.04.027 |
|
| 27 | HOU L M, LIAN F. Extension of nonlinear δ-generalized labeled multi-Bernoulli filter in multi-target tracking[C]//Proc. of the Chinese Automation Congress, 2018: 2301-2306. |
| 28 |
WANG B , YE W , LIU Y H . Variational Bayesian cubature RTS smoothing for transfer alignment of DPOS[J]. IEEE Sensors Journal, 2020, 20 (6): 3270- 3279.
doi: 10.1109/JSEN.2019.2958335 |
| 29 | 张磊, 郭健, 钱晨, 等. 基于变分贝叶斯的容积平滑变结构滤波[J]. 南京理工大学学报: 自然科学版, 2019, 43 (3): 255- 260. |
| ZHANG L , GUO J , QIAN C , et al. Variational Bayesian based cubature smooth variable structure filter[J]. Journal of Nanjing University of Science and Technology, 2019, 43 (3): 255- 260. | |
| 30 |
SCHUHMACHER D , VO B T , VO B N . A consistent metric for performance evaluation of multi-object filters[J]. IEEE Trans.on Signal Processing, 2008, 56 (8): 3447- 3457.
doi: 10.1109/TSP.2008.920469 |
| [1] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [2] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [3] | Yu LU, Zheng ZHOU. Observation station track optimization of airborne external transmitter location system [J]. Systems Engineering and Electronics, 2020, 42(12): 2708-2715. |
| [4] | Chunming ZHAO, Yueming YAO, Wen JIN, Weiyang SONG, Haihong FANG. Design of terminal guidance system for strapdown passive radar [J]. Systems Engineering and Electronics, 2020, 42(11): 2607-2613. |
| [5] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [6] | XU Hong, XIE Wenchong, WANG Yongliang. Gaussian sum cubature Kalman tracking filter with angle glint noise [J]. Systems Engineering and Electronics, 2019, 41(2): 229-235. |
| [7] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [8] | GUO Xiaoting, SUN Changku, WANG Peng. Vision and inertial fusion attitude measurement based on diagonalization of matrix robust QCKF [J]. Systems Engineering and Electronics, 2018, 40(2): 402-408. |
| [9] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng. Research on moving base initial alignment of SINS/OD with reduced dimension CKF and smoother [J]. Systems Engineering and Electronics, 2016, 38(9): 2135-2141. |
| [10] | QIAN Hua-ming, LIU Ke, MA Jun-da. Constant modulus blind beamforming algorithm based on adaptive CKF [J]. Systems Engineering and Electronics, 2016, 38(6): 1258-1261. |
| [11] | CHENG Pengfei, WU Chengfu. Neural network based robust adaptive nonlinear control for#br# aircraft under one side of wing loss [J]. Systems Engineering and Electronics, 2016, 38(3): 607-617. |
| [12] | WANG Hai-huan, WANG Jun. Multitarget tracking with the cubature Kalman particle probability hypothesis density filter [J]. Systems Engineering and Electronics, 2015, 37(9): 1960-1966. |
| [13] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng. Application of 5th-degree CKF in SINS nonlinear initial alignment [J]. Systems Engineering and Electronics, 2015, 37(3): 633-638. |
| [14] | LI Ning, ZHU Rui-hui, ZHANG Yong-gang. Adaptive square CKF method for target tracking based on Sage-Husa algorithm [J]. Systems Engineering and Electronics, 2014, 36(10): 1899-1905. |
| [15] | QIAN Hua-ming,GE Lei,HUANG Wei,PENG Yu. Reduced dimension CKF algorithm and its application in SINS initial alignment [J]. Journal of Systems Engineering and Electronics, 2013, 35(7): 1492-1497. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||