Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (4): 875-882.doi: 10.12305/j.issn.1001-506X.2021.04.03
• Electronic Technology • Previous Articles Next Articles
Maneuvering target tracking algorithm for airborne passive coherent localization system
Yu LU*( ), Haibin WANG()
), Haibin WANG()
- School of Aviation Operations and Support, Naval Aviation University, Yantai 264001, China
-
Received:2020-07-13Online:2021-03-25Published:2021-03-31 -
Contact:Yu LU E-mail:17664113162@163.com;hesonwhb@163.com
CLC Number:
Cite this article
Yu LU, Haibin WANG. Maneuvering target tracking algorithm for airborne passive coherent localization system[J]. Systems Engineering and Electronics, 2021, 43(4): 875-882.
share this article
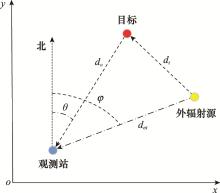
Fig.1
Detection diagram of the APCL"

Fig.2
Flow chart of the MMP-BVCKF algorithm"
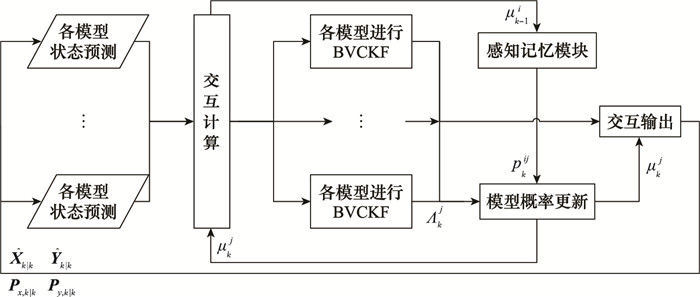
Table 1
Initial state values of the target, external emitter source, and observation station"
| 对象 | 位置(x, y)/m | 速度( |
| 目标 | (5 000, 5 000) | (150, 150) |
| 外辐射源 | (18 000, 5 000) | (-100, 0) |
| 观测站 | (3 000, 2 000) | (200, 0) |
Table 2
Maneuvering parameters under the CV-CA motion model"
| 时间/s | X方向加速度/(m/s2) | Y方向加速度/(m/s2) |
| 1~30 | 0 | 0 |
| 31~35 | 5 | -5 |
| 36~65 | 0 | 0 |
| 66~70 | -5 | 5 |
| 71~100 | 0 | 0 |
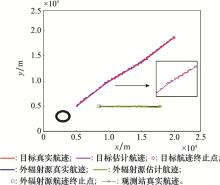
Fig.3
Tracking performance of the MMP-BVCKF algorithm under CV-CA model"
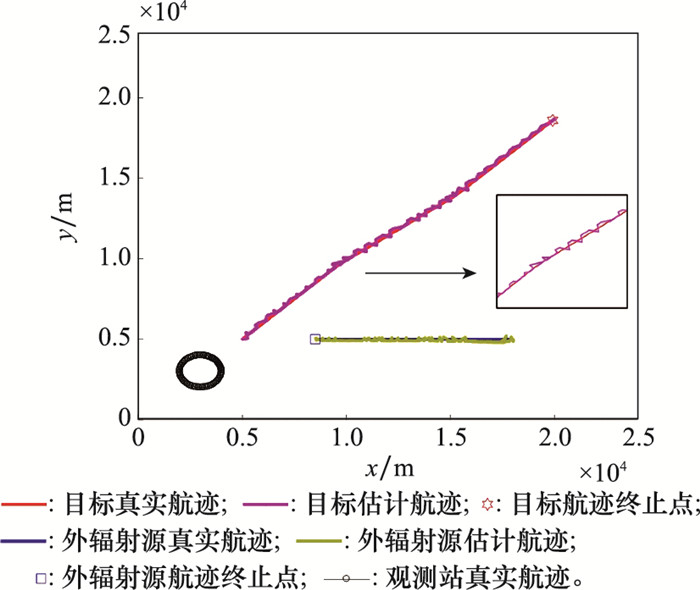
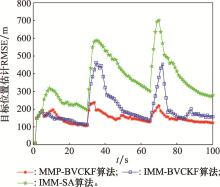
Fig.4
Target position estimation error curve under CV-CA model"

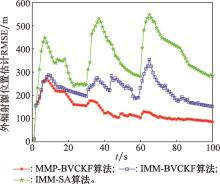
Fig.5
Position estimation error curve of external emitter source under CV-CA model"
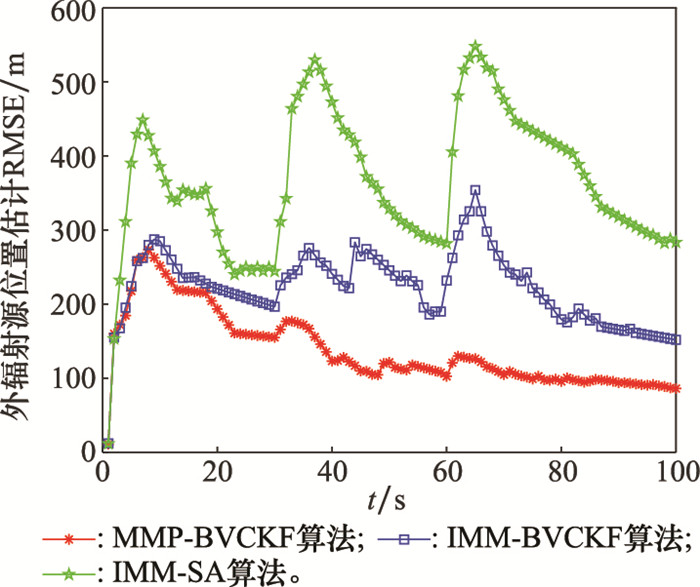
Table 3
ARMSE and time in one run of three algorithms under CV-CA model"
| 算法 | 参数 | ||
| 目标 ARMSE /m | 外辐射源 ARMSE /m | 单次运行时间/s | |
| IMM-SA | 363.483 6 | 364.817 2 | 0.837 |
| IMM-BVCKF | 201.631 9 | 222.671 9 | 0.429 |
| MMP-BVCKF | 151.004 4 | 137.966 3 | 0.558 |
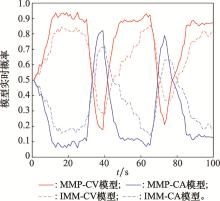
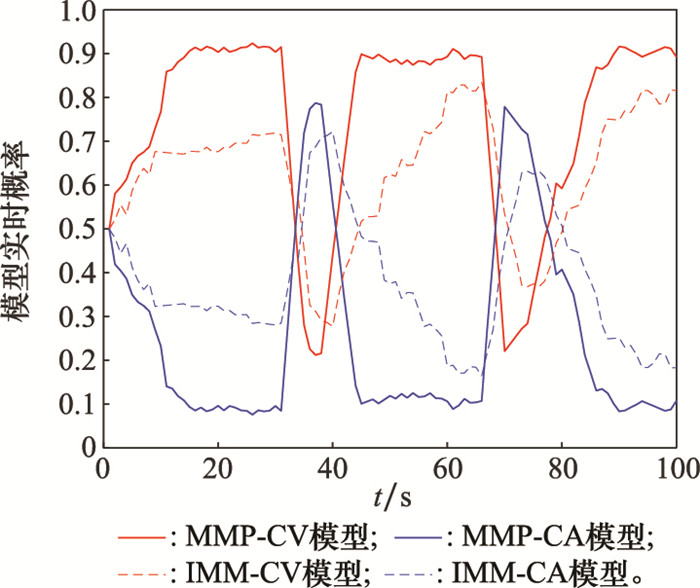
Fig.6
Probabilistic variation curves of CV-CA model under different algorithms"
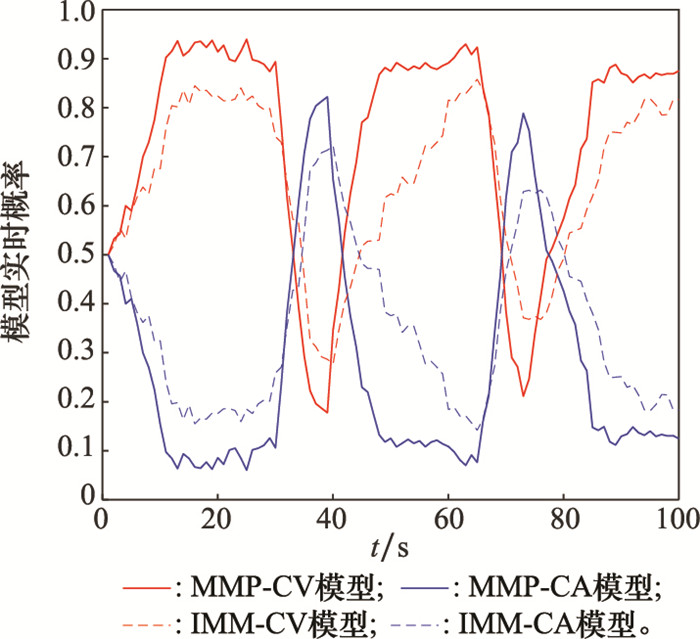
Table 4
Maneuvering parameters under CV-CT motion model"
| 时间/s | ω/(rad/s) |
| 1~30 | 0 |
| 31~35 | 0.15 |
| 36~65 | 0 |
| 66~70 | -0.15 |
| 71~100 | 0 |

Fig.7
Tracking performance of MMP-BVCKF algorithm under CV-CT model"

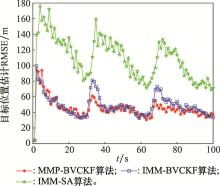
Fig.8
Target position estimation error curve under CV-CT model"
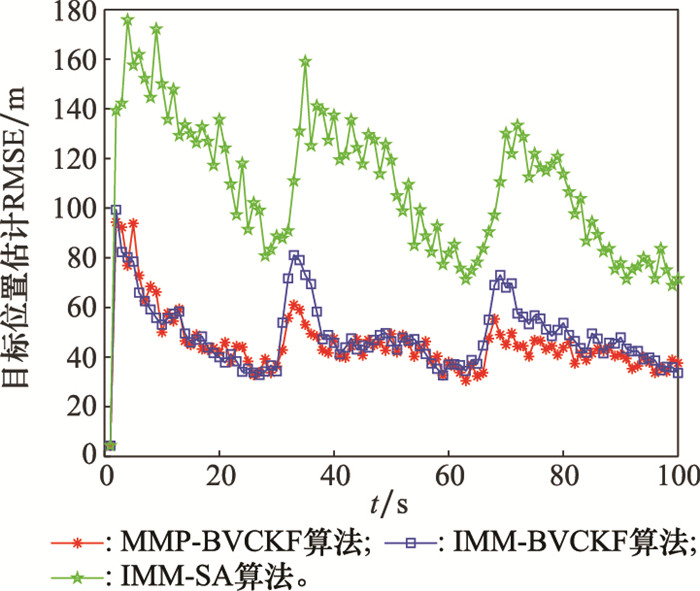
Fig.9
Position estimation error curve of external emitter source under CV-CT model"
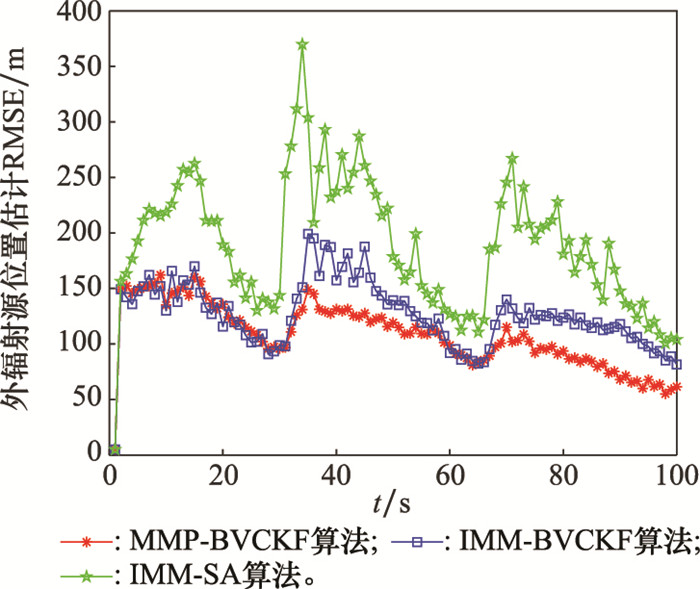
Table 5
ARMSE and time in one run of three algorithms under CV-CT model"
| 算法 | 参数 | ||
| 目标位置估计 ARMSE /m | 外辐射源位置 估计ARMSE /m | 单次运行时间/s | |
| IMM-SA | 108.691 0 | 188.681 7 | 0.914 |
| IMM-BVCKF | 48.774 4 | 126.267 5 | 0.606 |
| MMP-BVCKF | 45.419 6 | 108.525 0 | 0.525 |
Fig.10
Probabilistic variation curves of CV-CT model under different algorithms"
| 1 | 卢雨, 周正. 空基外辐射源定位系统的可观测性分析[J]. 系统工程与电子技术, 2020, 42 (6): 1241- 1247. |
| LU Y , ZHOU Z . Observability analysis of airborne external transmitter location system[J]. Systems Engineering and Electronics, 2020, 42 (6): 1241- 1247. | |
| 2 |
PAINE S , O'HAGAN D W , INGGS M , et al. Evaluating the performance of FM-based PCL radar in the presence of jamming[J]. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (2): 631- 643.
doi: 10.1109/TAES.2018.2858158 |
| 3 | PARK G H , KIM D G , KIM H J , et al. Maximum-likelihood angle estimator for multi-channel FM-radio-based passive coherent location[J]. IET Radar, Sonar & Navigation, 2018, 12 (6): 617- 625. |
| 4 |
CHOI S , CROUSE D , WILLETT P , et al. Multistatic target tracking for passive radar in a DAB/DVB network: initiation[J]. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (3): 2460- 2469.
doi: 10.1109/TAES.2015.130270 |
| 5 |
BOURNAKA G , UMMENHOFER M , CRISTALLINI D , et al. Experimental study for transmitter imperfections in DVB-T based passive radar[J]. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (3): 1341- 1354.
doi: 10.1109/TAES.2017.2785518 |
| 6 |
WANG H , WANG J , LI H . Target detection using CDMA based passive bistatic radar[J]. Journal of Systems Engineering and Electronics, 2012, 23 (6): 858- 865.
doi: 10.1109/JSEE.2012.00105 |
| 7 |
COLONE F , MARTELLI T , BONGIOANNI C , et al. WiFi-based PCL for monitoring private airfields[J]. IEEE Aerospace and Electronic Systems Magazine, 2017, 32 (2): 22- 29.
doi: 10.1109/MAES.2017.160022 |
| 8 | DETOMA E. Exploitation of GNSS signals as illuminators of opportunity in passive coherent location (PCL) systems[C]//Proc. of the IEEE 5th International Workshop on Metrology for Aerospace, 2019: 340-348. |
| 9 |
KAISER S A , CHRISTIANSON A J , NARAYANAN R M . Multistatic Doppler estimation using global positioning system passive coherent location[J]. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (6): 2978- 2991.
doi: 10.1109/TAES.2019.2899771 |
| 10 | 郭云飞, 张沛男, 才智. 基于DP-SA的机载外辐射源无源协同定位[J]. 航空学报, 2018, 39 (7): 163- 171. |
| GUO Y F , ZHANG P N , CAI Z . DP-SA based airborne passive coherent location[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39 (7): 163- 171. | |
| 11 |
GUO Y F , THARMARASA R , KIRUBA-RAJAN T , et al. Passive coherent location with unknown transmitter states[J]. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (1): 148- 168.
doi: 10.1109/TAES.2017.2649739 |
| 12 | SUN W , YANG Y . Adaptive maneuvering frequency method of current statistical model[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4 (1): 154- 160. |
| 13 | YANG Y , FAN X , ZHUO Z , et al. AFAKF for manoeuvring target tracking based on current statistical model[J]. IET Science, Measurement & Technology, 2016, 10 (6): 637- 643. |
| 14 |
HAN B , HUANG H , LEI L , et al. An improved IMM algorithm based on STSRCKF for maneuvering target tracking[J]. IEEE Access, 2019, 7, 57795- 57804.
doi: 10.1109/ACCESS.2019.2912983 |
| 15 |
LAN J , LI X , CHUNDI M . Best model augmentation for variable-structure multiple-model estimation[J]. IEEE Trans. on Aerospace and Electronic Systems, 2011, 47 (3): 2008- 2025.
doi: 10.1109/TAES.2011.5937279 |
| 16 | 陈星, 李战武, 徐安, 等. 基于目标机动模式识别的VSMM算法[J]. 系统工程与电子技术, 2020, 42 (5): 999- 1006. |
| CHEN X , LI Z W , XU A , et al. VSMM algorithm based on target maneuver pattern recognition[J]. Systems Engineering and Electronics, 2020, 42 (5): 999- 1006. | |
| 17 | SHI Z G , LI Y K , WANG Z Y . Switched multi-model estimation using probabilistic neural network decision for maneuvering target tracking[J]. International Journal of Innovative Computing Information Control, 2018, 14 (4): 1481- 1493. |
| 18 |
YU Y H . Distributed multi-model Bernoulli filters for maneuvering target tracking[J]. IEEE Sensors Journal, 2018, 18 (14): 5885- 5896.
doi: 10.1109/JSEN.2018.2843389 |
| 19 |
王树亮, 毕大平, 阮怀林, 等. 基于信息熵准则的认知雷达机动目标跟踪算法[J]. 电子学报, 2019, 47 (6): 1277- 1284.
doi: 10.3969/j.issn.0372-2112.2019.06.014 |
|
WANG S L , BI D P , RUAN H L , et al. Cognitive radar maneuvering target tracking algorithm based on information entropy criterion[J]. Acta Electronica Sinica, 2019, 47 (6): 1277- 1284.
doi: 10.3969/j.issn.0372-2112.2019.06.014 |
|
| 20 |
WANG J , ZHAN T , XU X , et al. A variational Bayesian based strong tracking interpolatory cubature Kalman filter for maneuvering target tracking[J]. IEEE Access, 2018, 6, 52544- 52560.
doi: 10.1109/ACCESS.2018.2869020 |
| 21 |
ARASARATNAM I , HAYKIN S , HURD T R . Cubature Kalman filtering for continuous-discrete systems: theory and simulations[J]. IEEE Trans. on Signal Processing, 2010, 58 (10): 4977- 4993.
doi: 10.1109/TSP.2010.2056923 |
| 22 | ZHAO M L, WANG L X, QIN W W. Seventh-degree spherical simplex-radial cubature Kalman filter[C]//Proc. of the 37th Chinese Control Conference, 2018: 965-970. |
| 23 | DEY A. Adaptive higher degree cubature quadrature information filter for multiple sensor fusion[C]//Proc. of the IEEE 1st International Conference on Energy, Systems and Information Processing, 2019. |
| [1] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [2] | Juqi YIN, Zhen YANG, Yazhong LUO, Jianyong ZHOU. Improved adaptive IMM algorithm for space maneuvering target tracking [J]. Systems Engineering and Electronics, 2021, 43(12): 3658-3666. |
| [3] | Xing CHEN, Zhanwu LI, An XU, Xiaodong HU. VSMM algorithm based on target maneuver pattern recognition [J]. Systems Engineering and Electronics, 2020, 42(5): 999-1006. |
| [4] | Yu LU, Zheng ZHOU. Observation station track optimization of airborne external transmitter location system [J]. Systems Engineering and Electronics, 2020, 42(12): 2708-2715. |
| [5] | LIU Dai, ZHAO Yongbo, ZHOU Yongwei, CHEN Mingzhe, LI Wei. Maneuvering target tracking algorithm aided by a high resolution range profile [J]. Systems Engineering and Electronics, 2019, 41(9): 1967-1972. |
| [6] | ZHANG Haowei, XIE Junwei, GE Jiaang, ZONG Binfeng, LU Wenlong. Strong tracking squareroot cubature Kalman filter overadaptive current statistical model [J]. Systems Engineering and Electronics, 2019, 41(6): 1186-1194. |
| [7] |
SUN Yang, ZHENG Nae, LI Yuxiang, REN Xiukun.
Distributed MIMO radar resource allocation approach for target tracking [J]. Systems Engineering and Electronics, 2017, 39(8): 1744-1750. |
| [8] | YANG Yong-jian, FAN Xiao-guang, WANG Sheng-da, ZHUO Zhen-fu, NAN Jian-guo, HUANG Bo-ru. Interacting multiple model algorithm based on adaptive current statistical model [J]. Systems Engineering and Electronics, 2016, 38(5): 977-. |
| [9] | GUO Zhi, DONG Chun-yun, CAI Yuan-li, YU Zhen-hua. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking [J]. Systems Engineering and Electronics, 2015, 37(1): 24-30. |
| [10] | CAI Zongping, DAI Dingcheng, NIU Chuang. Interacting multiple model algorithm with cubature particle filter [J]. Systems Engineering and Electronics, 2014, 36(12): 2366-2370. |
| [11] | ZHOU Hang, FENG Xin-xi, WANG Rong, ZHANG Jing. Maneuvering target passive tracking based on adaptive extended H∞ filter [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 256-262. |
| [12] | LI Liangqun, XIE Weixin, ZHANG Zhichao. New adaptive α-β tracking filter algorithm based on fuzzy logic [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 244-249. |
| [13] | CHEN Liang, YANG Jun-wei, SHU Xiao-di. Model-set adaptive algorithm of variable structure multiple-model based on K-L criterion [J]. Systems Engineering and Electronics, 2013, 35(12): 2459-2466. |
| [14] | ZHOU Wei-dong, ZHANG He-bing, LIAO Cheng-yi. Application of GMCPHD filter algorithm based on VSMM in multiple maneuvering targets tracking [J]. Journal of Systems Engineering and Electronics, 2013, 35(1): 9-14. |
| [15] | LUO Shao-hua, XU Hui, XU Yang, AN Wei. UT based MMPHD filter for tracking maneuvering targets [J]. Journal of Systems Engineering and Electronics, 2012, 34(4): 666-672. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||