Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 144-156.doi: 10.12305/j.issn.1001-506X.2026.01.14
• Systems Engineering • Previous Articles Next Articles
Vehicle-based multi-UAV cooperative task planning method for area search
Fangyu HONG1( ), Qing YE2, Lining ZHANG3, Guohua WU4,*
), Qing YE2, Lining ZHANG3, Guohua WU4,*
- 1. School of Traf?c and Transportation Engineering,Central South University,Changsha 410075,China
2. BYD Auto Industry Company Limited,Shenzhen 518118,China
3. Unit 93128 of the PLA,Beijing 100085,China
4. School of Automation,Central South University,Changsha 410017,China
-
Received:2025-06-19Online:2026-01-25Published:2026-02-11 -
Contact:Guohua WU E-mail:fangyuhong@csu.edu.cn
CLC Number:
Cite this article
Fangyu HONG, Qing YE, Lining ZHANG, Guohua WU. Vehicle-based multi-UAV cooperative task planning method for area search[J]. Systems Engineering and Electronics, 2026, 48(1): 144-156.
share this article
Fig.1
Schematic diagram of multi-truck and multi-drone collaborative area search mode"


Fig.2
Example of area division"
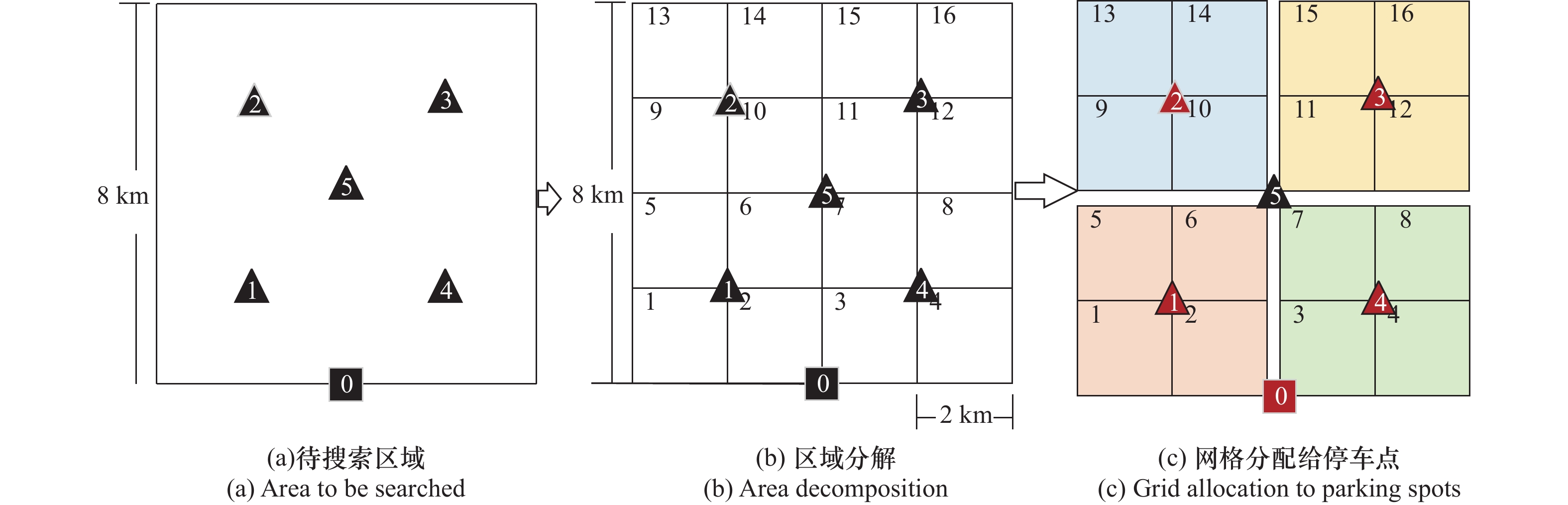
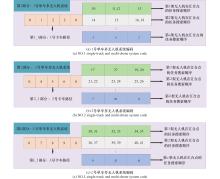
Fig.3
Decoding schematic diagram"

Fig.4
Randomly changing path of truck"
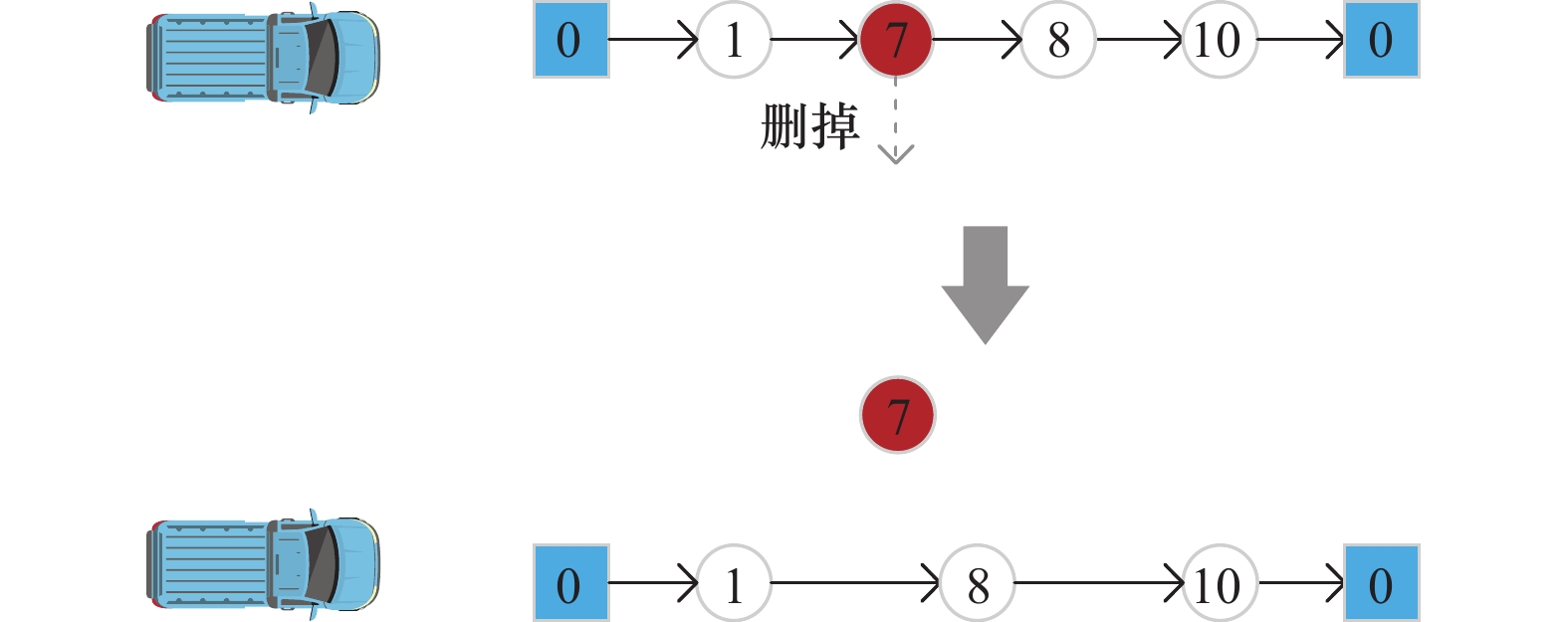

Fig.5
Changing the longest truck path"
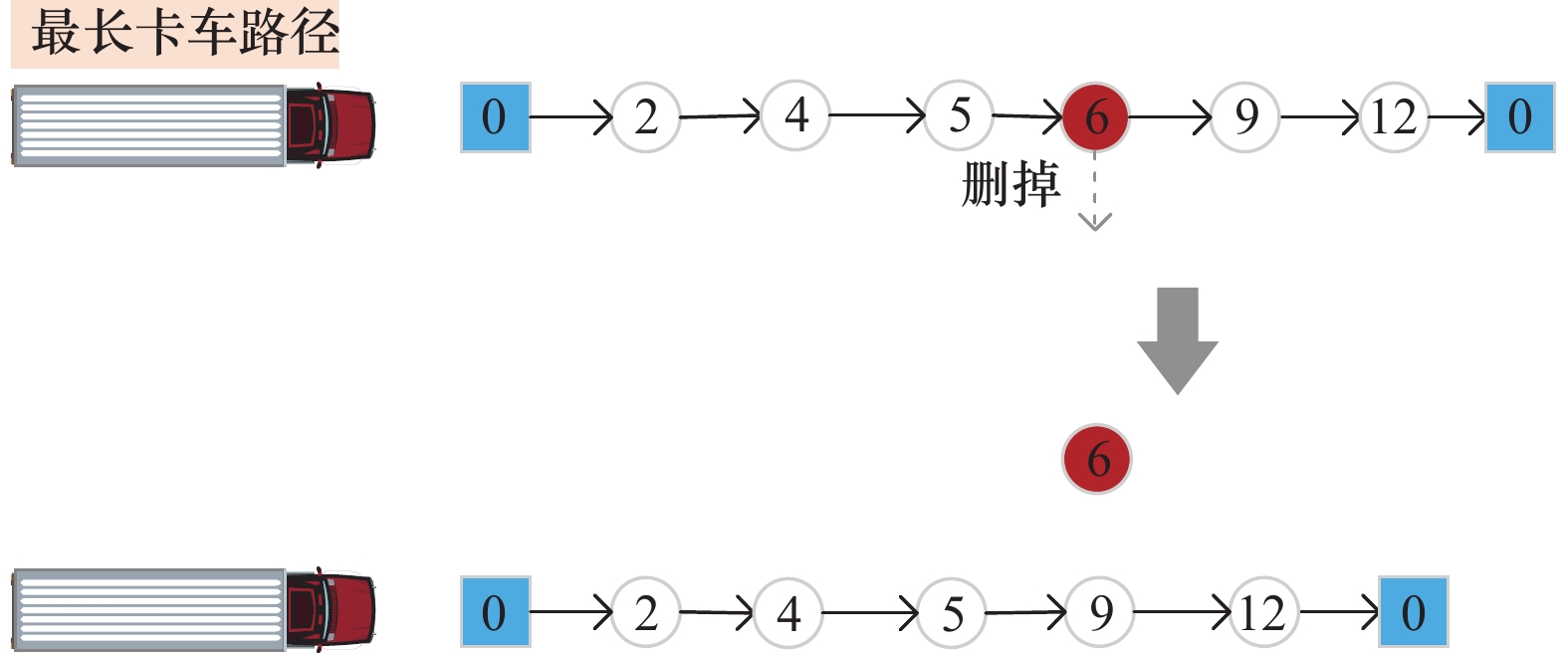
Fig.6
Schematic diagram of perturbation operation"
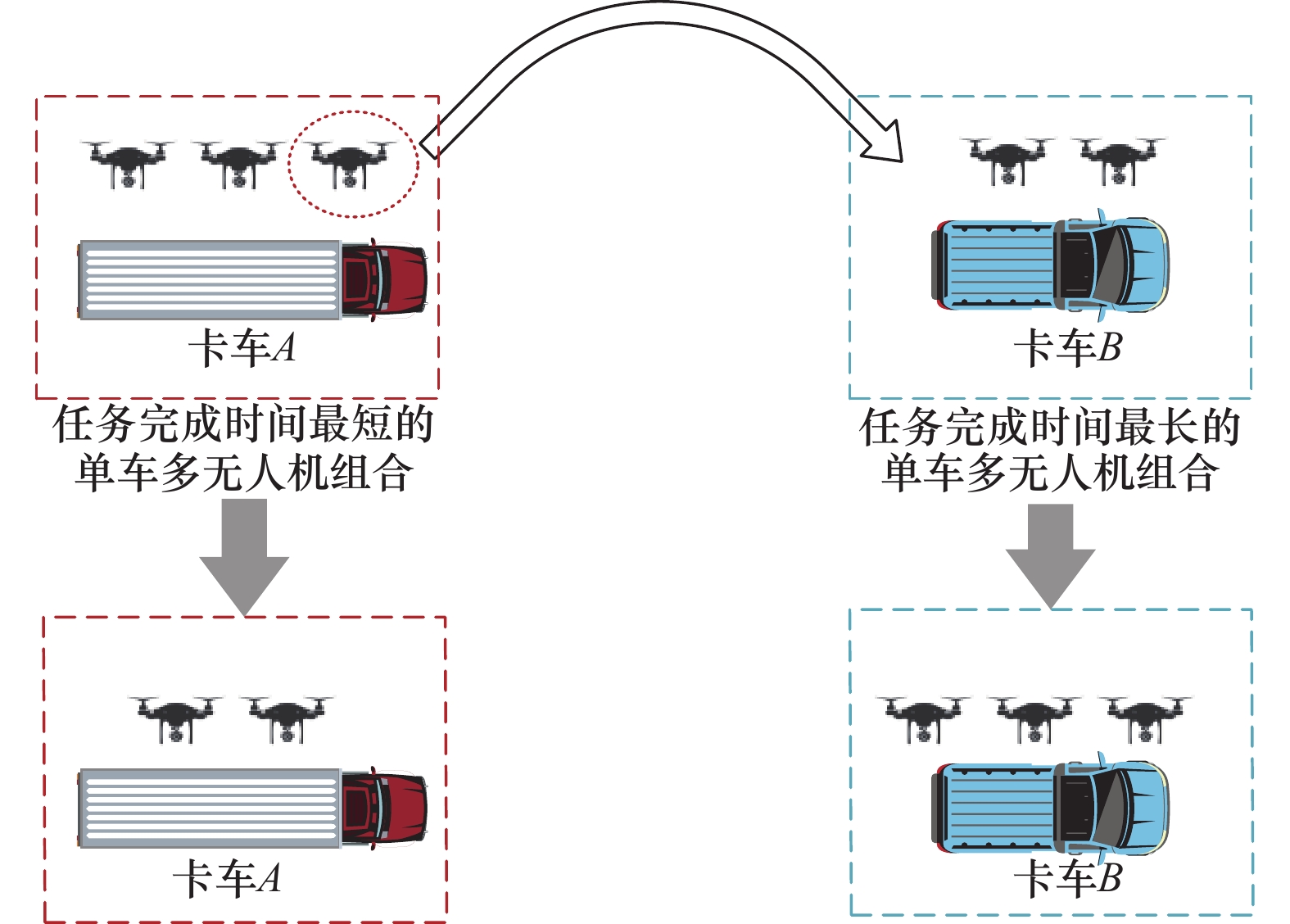
Table 1
Setting of algorithm parameters"
| 参数 | 设定值 |
| 无人机续航时间 | 50 |
| 无人机扫描宽度 | 100 |
| 最大网格搜索面积/km2 | 4 |
| 覆盖重叠率/% | 20 |
| 无人机飞行速度 | 80 |
| 卡车行驶速度 | 40 |
| 机动航程 | 6 |
| 初始温度 | |
| 终止温度 | 10 |
| 降温速度 | 0.97 |
| 等温过程最大迭代次数 | 10 |
| 最大迭代次数 | |
| 禁忌表长度 | 50 |
Fig.7
Partial area and grid diagram of real data simulation instance"
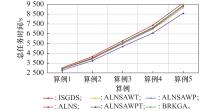
Fig.8
Comparison of total completion time of all algorithms"
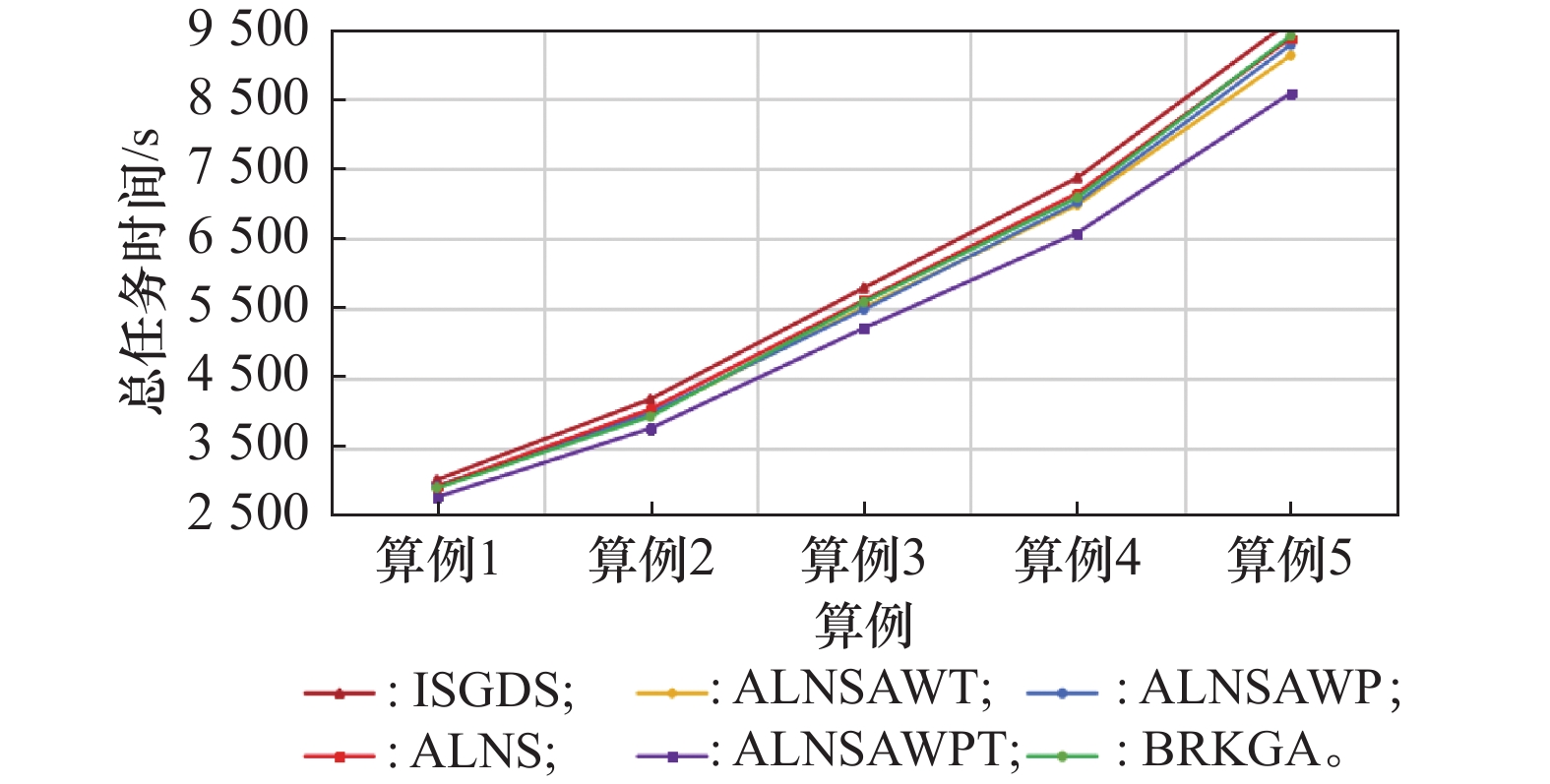
Table 2
Results of task completion time generated by ALNSAWPT and other five algorithms s"
| 算例 | ISGDS | ALNSAWP | ALNSWPT | ALNS | BRKGA | ALNSAWT |
| 算例1 | ||||||
| 算例2 | ||||||
| 算例3 | ||||||
| 算例4 | ||||||
| 算例5 |
Table 3
Total task completion time of ALNSAWPT for different instances s"
| 多车多无人机情形 | 算例1 | 算例2 | 算例3 | 算例4 | 算例5 |
| 1车4无人机 | |||||
| 1车5无人机 | |||||
| 1车6无人机 | |||||
| 1车7无人机 | |||||
| 2车4无人机 | |||||
| 2车5无人机 | |||||
| 2车6无人机 | |||||
| 2车7无人机 | |||||
| 2车8无人机 | |||||
| 2车9无人机 | |||||
| 2车10无人机 | |||||
| 3车6无人机 | |||||
| 3车7无人机 | |||||
| 3车8无人机 | |||||
| 3车9无人机 | |||||
| 3车10无人机 |
Table 4
Improvement of ISGDS by ALNSAWPT %"
| 多车多无人机情形 | 算例1 | 算例2 | 算例3 | 算例4 | 算例5 | 平均提升度 |
| 2车4无人机 | 8.32 | 6.22 | 6.70 | 10.90 | 9.70 | 8.37 |
| 2车5无人机 | 8.12 | 8.14 | 6.20 | 6.90 | 12.30 | 8.33 |
| 2车6无人机 | 6.90 | 9.30 | 9.10 | 9.50 | 13.60 | 9.68 |
| 2车7无人机 | 10.08 | 9.62 | 8.90 | 10.10 | 11.20 | 9.98 |
| 2车8无人机 | 10.39 | 11.69 | 13.50 | 7.40 | 8.90 | 10.38 |
| 2车9无人机 | 6.94 | 10.72 | 11.30 | 11.80 | 10.10 | 10.17 |
| 2车10无人机 | 7.58 | 10.03 | 12.80 | 12.60 | 7.80 | 10.16 |
| 3车6无人机 | 8.08 | 9.76 | 5.90 | 8.70 | 7.60 | 8.01 |
| 3车7无人机 | 6.55 | 11.01 | 9.60 | 7.80 | 10.50 | 9.09 |
| 3车8无人机 | 9.62 | 10.48 | 7.80 | 15.30 | 14.50 | 11.54 |
| 3车9无人机 | 7.02 | 7.56 | 14.10 | 14.20 | 15.40 | 11.66 |
| 3车10无人机 | 8.59 | 11.48 | 10.20 | 13.50 | 6.90 | 10.13 |
| 平均提升度 | 8.17 | 9.98 | 9.95 | 10.71 | 10.80 | 9.92 |
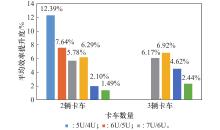
Fig.9
Efficiency improvement by every additional drone"
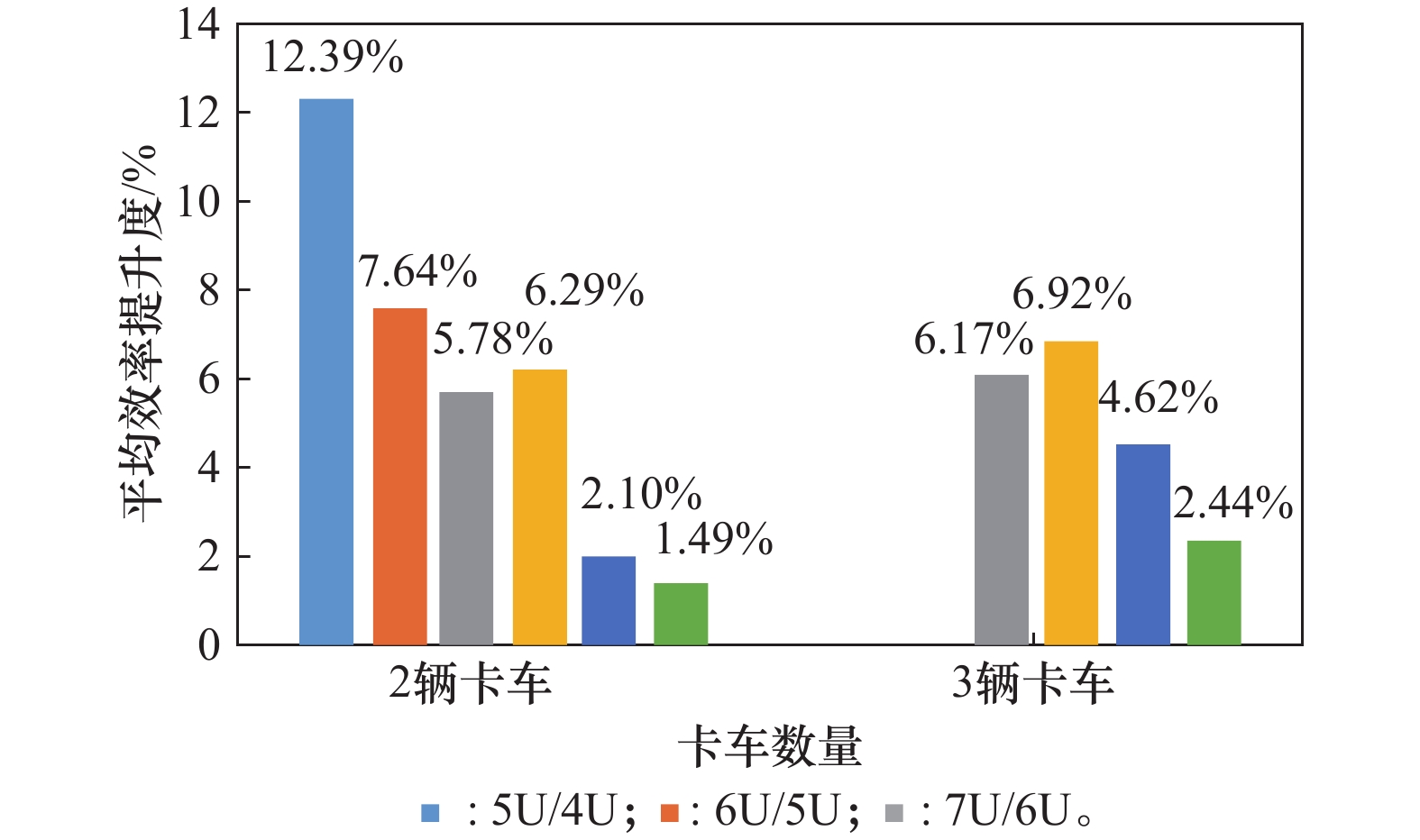
Table 5
Efficiency improvement by increase of trucks number"
| 算例 | 无人机数量 | 2辆卡车相比1辆 卡车效率提升/% | 3辆卡车相比2辆 卡车效率提升/% |
| 算例1 | 4 | 52.20 | — |
| 5 | 50.14 | — | |
| 6 | 52.94 | 29.67 | |
| 7 | 50.85 | 32.10 | |
| 算例2 | 4 | 51.48 | — |
| 5 | 49.91 | — | |
| 6 | 53.13 | 28.89 | |
| 7 | 52.42 | 29.94 | |
| 算例3 | 4 | 48.38 | — |
| 5 | 51.73 | — | |
| 6 | 48.32 | 35.26 | |
| 7 | 50.45 | 32.68 | |
| 算例4 | 4 | 49.05 | — |
| 5 | 50.00 | — | |
| 6 | 52.74 | 29.46 | |
| 7 | 51.06 | 31.94 | |
| 算例5 | 4 | 47.40 | — |
| 5 | 50.33 | — | |
| 6 | 49.52 | 33.95 | |
| 7 | 50.90 | 32.09 | |
| 均值 | 50.65 | 31.60 | |
| 1 |
FAN M F, LIU H, WU G H, et al. Multi-UAV reconnaissance mission planning via deep reinforcement learning with simulated annealing[J]. Swarm and Evolutionary Computation, 2025, 93, 101858.
doi: 10.1016/j.swevo.2025.101858 |
| 2 | ZHANG X, ZENG S. The drone-assisted simultaneous pickup and delivery problem with time windows[J]. Computers & Operations Research, 2025, 178, 106996. |
| 3 |
JIN Z Y, NG K K H, ZHANG C L, et al. A risk-averse distributionally robust optimisation approach for drone-supported relief facility location problem[J]. Transportation Research Part E-Logistics and Transportation Review, 2024, 186, 103538.
doi: 10.1016/j.tre.2024.103538 |
| 4 |
HOANG V D, EBEID E S M. Manipulating magnetic field of the magnetic gripper with charging feature for drones on energized power lines[J]. IEEE Trans. on Industrial Electronics, 2024, 71 (11): 14691- 14700.
doi: 10.1109/TIE.2024.3363774 |
| 5 |
LIU C F, WICKRAMASINGHE N D, SURAWEERA H A, et al. URLLC-aware proactive UAV placement in internet of vehicles[J]. IEEE Trans. on Intelligent Transportation Systems, 2024, 25 (8): 10446- 10451.
doi: 10.1109/TITS.2024.3352971 |
| 6 |
FENG L C, KATUPITIYA J. UAV-based persistent full area coverage with dynamic priorities[J]. Robotics and Autonomous Systems, 2022, 157, 104244.
doi: 10.1016/j.robot.2022.104244 |
| 7 |
XIAO Y G, YANG H, LIU H, et al. AAV 3-D path planning based on MOEA/D with adaptive areal weight adjustment[J]. IEEE Trans. on Aerospace and Electronic Systems, 2025, 61 (1): 753- 769.
doi: 10.1109/TAES.2024.3449795 |
| 8 |
XU B J, ZHAO K X, LUO Q Z, et al. A GV-drone arc routing approach for urban traffic patrol by coordinating a ground vehicle and multiple drones[J]. Swarm and Evolutionary Computation, 2023, 77, 101246.
doi: 10.1016/j.swevo.2023.101246 |
| 9 |
XIA Y S, CHEN C, LIU Y, et al. Two-layer path planning for multi-area coverage by a cooperative ground vehicle and drone system[J]. Expert Systems with Applications, 2023, 217, 119604.
doi: 10.1016/j.eswa.2023.119604 |
| 10 |
田双喜, 陈洪辉, 徐彬杰, 等. 车辆支持的多无人机多区域覆盖路径规划算法[J]. 国防科技大学学报, 2024, 46 (6): 227- 234.
doi: 10.11887/j.cn.202406025 |
|
TIAN S X, CHEN H H, XU B J. Coverage path planning algorithm for multi-area by truck-supported multi-UAV[J]. Journal of National University of Defense Technology, 2024, 46 (6): 227- 234.
doi: 10.11887/j.cn.202406025 |
|
| 11 |
MURRAY C C, RAJ R. The multiple flying sidekicks traveling salesman problem: parcel delivery with multiple drones[J]. Transportation Research Part C: Emerging Technologies, 2020, 110, 368- 398.
doi: 10.1016/j.trc.2019.11.003 |
| 12 |
WU G H, MAO N, LUO Q Z, et al. Collaborative truck-drone routing for contactless parcel delivery during the epidemic[J]. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (12): 25077- 25091.
doi: 10.1109/TITS.2022.3181282 |
| 13 |
HAM A M. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming[J]. Transportation Research Part C: Emerging Technologies, 2018, 91, 1- 14.
doi: 10.1016/j.trc.2018.03.025 |
| 14 |
YANPIRAT N, SILVA D F, SMITH A E. Sustainable last mile parcel delivery and return service using drones[J]. Engineering Applications of Artificial Intelligence, 2023, 124, 106631.
doi: 10.1016/j.engappai.2023.106631 |
| 15 | 夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46 (9): 3070- 3081. |
| XIA Y Q, HUANG Y Y, CHEN Q. Path planning for unmanned vehicle reconnaissance based on deep Q-network[J]. Systems Engineering and Electronics, 2024, 46 (9): 3070- 3081. | |
| 16 |
DUKKANCI O, CAMPBELL J F, KARA B Y. Facility location decisions for drone delivery: a literature review[J]. European Journal of Operational Research, 2024, 316 (2): 397- 418.
doi: 10.1016/j.ejor.2023.10.036 |
| 17 |
ZHOU H, QIN H, CHENG C, et al. An exact algorithm for the two-echelon vehicle routing problem with drones[J]. Transportation Research Part B-Methodological, 2023, 168, 124- 150.
doi: 10.1016/j.trb.2023.01.002 |
| 18 |
LIU Y C. Routing battery-constrained delivery drones in a depot network: a business model and its optimization-simulation assessment[J]. Transportation Research Part C-Emerging Technologies, 2023, 152, 104147.
doi: 10.1016/j.trc.2023.104147 |
| 19 |
XIA Y, ZENG W J, ZHANG C R, et al. A branch-and-price-and-cut algorithm for the vehicle routing problem with load-dependent drones[J]. Transportation Research Part B-Methodological, 2023, 171, 80- 110.
doi: 10.1016/j.trb.2023.03.003 |
| 20 |
HONG F Y, WU G H, LUO Q Z, et al. Logistics in the sky: a two-phase optimization approach for the drone package pickup and delivery system[J]. IEEE Trans. on Intelligent Transportation Systems, 2023, 24 (9): 9175- 9190.
doi: 10.1109/TITS.2023.3271430 |
| 21 |
MENG S S, CHEN Y R, LI D. The multi-visit drone-assisted pickup and delivery problem with time windows[J]. European Journal of Operational Research, 2024, 314 (2): 685- 702.
doi: 10.1016/j.ejor.2023.10.021 |
| 22 |
范厚明, 甘兰, 张跃光, 等. 有禁飞区的时间依赖型车辆与无人机协同配送路径优化[J]. 控制理论与应用, 2024, 41 (2): 321- 330.
doi: 10.7641/CTA.2022.20249 |
|
FAN H M, GAN L, ZHANG Y G, et al. Time-dependent vehicle routing problem with drones considering no-fly zones[J]. Control Theory & Applications, 2024, 41 (2): 321- 330.
doi: 10.7641/CTA.2022.20249 |
|
| 23 |
MENG S S, GUO X P, LI D, et al. The multi-visit drone routing problem for pickup and delivery services[J]. Transportation Research Part E-Logistics and Transportation Review, 2023, 169, 102990.
doi: 10.1016/j.tre.2022.102990 |
| 24 | 薛镇涛, 陈建, 张自超, 等. 基于复杂地块凸划分优化的多无人机覆盖路径规划[J]. 航空学报, 2022, 43 (12) |
| XUE Z T, CHEN J, ZHANG Z C, et al. Multi-UAV coverage path planning based on optimization of convex division of complex plots[J]. Acta Aeronautics et Astronautica Sinica, 2022, 43 (12) | |
| 25 |
CHEN G Z, SHEN Y, ZHANG Y X, et al. 2D multi-area coverage path planning using L-SHADE in simulated ocean survey[J]. Applied Soft Computing, 2021, 112, 107754.
doi: 10.1016/j.asoc.2021.107754 |
| 26 |
CABREIRA T M, DI-FRANCO C, FERREIRA P R, et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. IEEE Robotics and Automation Letters, 2018, 3 (4): 3662- 3668.
doi: 10.1109/LRA.2018.2854967 |
| 27 | 夏阳升, 石建迈, 陈超, 等. 车机协同多区域覆盖侦察路径规划方法[J]. 指挥与控制学报, 2020, 6 (4): 372- 380. |
| XIA Y S, SHI J M, CHEN C, et al. Path planning method for multi-area reconnaissance by cooperated ground vehicle and drone[J]. Journal of Command and Control, 2020, 6 (4): 372- 380. | |
| 28 |
KITJACHAROENCHAI P, MIN B C, LEE S. Two echelon vehicle routing problem with drones in last mile delivery[J]. International Journal of Production Economics, 2020, 225, 107598.
doi: 10.1016/j.ijpe.2019.107598 |
| 29 |
ROPERO F, MUÑOZ P, R-MORENO M D. TERRA: a path planning algorithm for cooperative UGV-UAV exploration[J]. Engineering Applications of Artificial Intelligence, 2019, 78, 260- 272.
doi: 10.1016/j.engappai.2018.11.008 |
| 30 |
ATENCIA C R, DEL-SER J, CAMACHO D. Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning[J]. Swarm and Evolutionary Computation, 2019, 44, 480- 495.
doi: 10.1016/j.swevo.2018.06.005 |
| 31 |
LUO Q Z, WU G H, JI B, et al. Hybrid multi-objective optimization approach with Pareto local search for collaborative truck-drone routing problems considering flexible time windows[J]. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (8): 13011- 13025.
doi: 10.1109/TITS.2021.3119080 |
| 32 |
ROPKE S, PISINGER D. An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows[J]. Transportation Science, 2006, 40 (4): 455- 472.
doi: 10.1287/trsc.1050.0135 |
| 33 | SOARES L C R, CARVALHO M A M. Biased random-key genetic algorithm for the job sequencing and tool switching problem with non-identical parallel machines[J]. Computers & Operations Research, 2024, 163, 106509. |
| [1] | Jianbo YUAN, Yonghao DU, Yingguo CHEN, Yongming HE. Research on imaging satellite mission planning model and algorithm for point-cluster and large-region targets [J]. Systems Engineering and Electronics, 2025, 47(9): 2939-2950. |
| [2] | Yi JIANG, Yuhe MAO, Chengfei YUE, Yunhua WU. Mega-constellation situational awareness mission planning with multi-constraints [J]. Systems Engineering and Electronics, 2025, 47(9): 3047-3057. |
| [3] | Xuesong WANG, Jiapeng YIN, Jiankai HUANG, Jianbing LI, Yongzhen LI. Air floating ball trajectory prediction and payload judgment with radar wind field inversion [J]. Systems Engineering and Electronics, 2025, 47(9): 2839-2852. |
| [4] | LI Zhiliang, LI Xiaojiang, ZHANG Donglai. Proactive scheduling of agile imaging satellite based on improved differential evolution algorithm [J]. Systems Engineering and Electronics, 2018, 40(2): 353-359. |
| [5] | GUO Xiaoting, SUN Changku, WANG Peng. Vision and inertial fusion attitude measurement based on diagonalization of matrix robust QCKF [J]. Systems Engineering and Electronics, 2018, 40(2): 402-408. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||