Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (2): 715-721.doi: 10.12305/j.issn.1001-506X.2024.02.35
• Guidance, Navigation and Control • Previous Articles
Robot motion planning method for space truss on-orbit assembly
Cong LIU1,*, Haifeng LI2, Mingming WANG3, Jianjun LUO3
- 1. AVIC Xi'an Flight Automatic Control Research Institute, Xi'an 710076, China
2. The Fifth Military Representative Office of Air Force Armament Division in Xi'an Area, Xi'an 710065, China
3. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
-
Received:2022-06-20Online:2024-01-25Published:2024-02-06 -
Contact:Cong LIU
CLC Number:
Cite this article
Cong LIU, Haifeng LI, Mingming WANG, Jianjun LUO. Robot motion planning method for space truss on-orbit assembly[J]. Systems Engineering and Electronics, 2024, 46(2): 715-721.
share this article
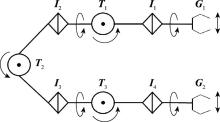
Fig.1
Schematic diagram of assembly robot's structure"
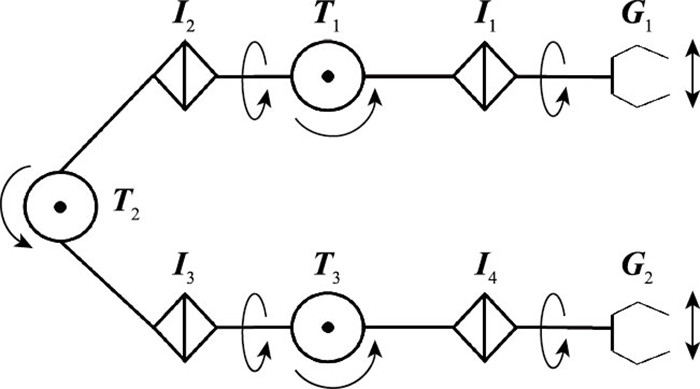
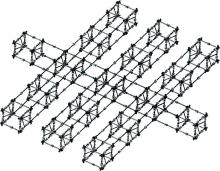
Fig.2
Hexahedron element space truss structure"
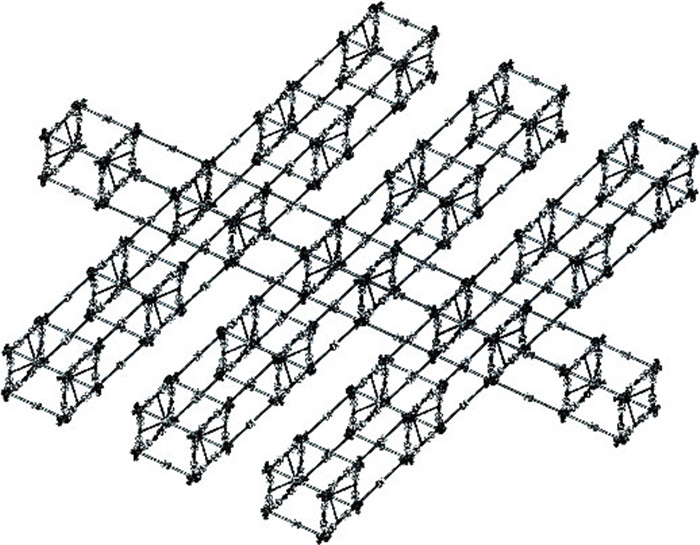

Fig.3
Simulation environment settings"
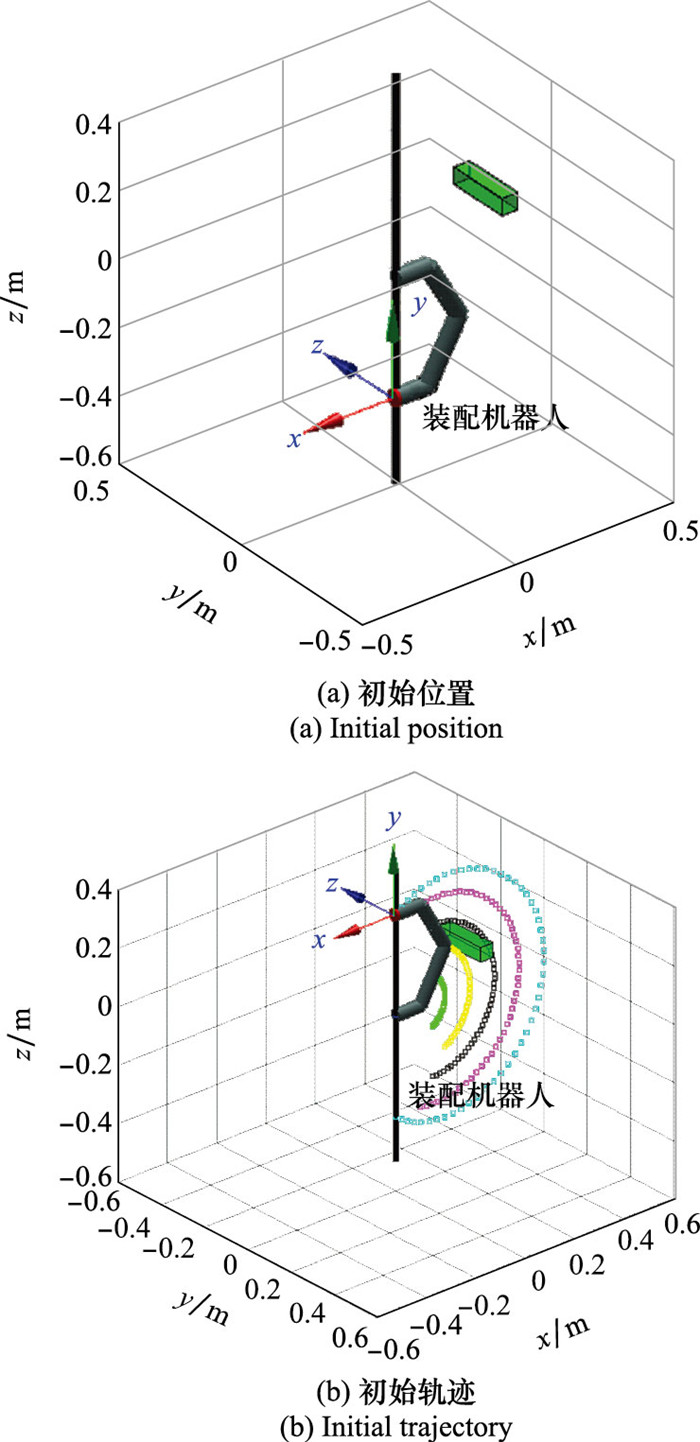
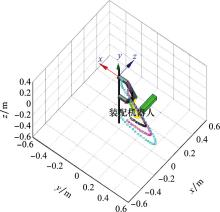
Fig.4
Robot motion diagram without collision"
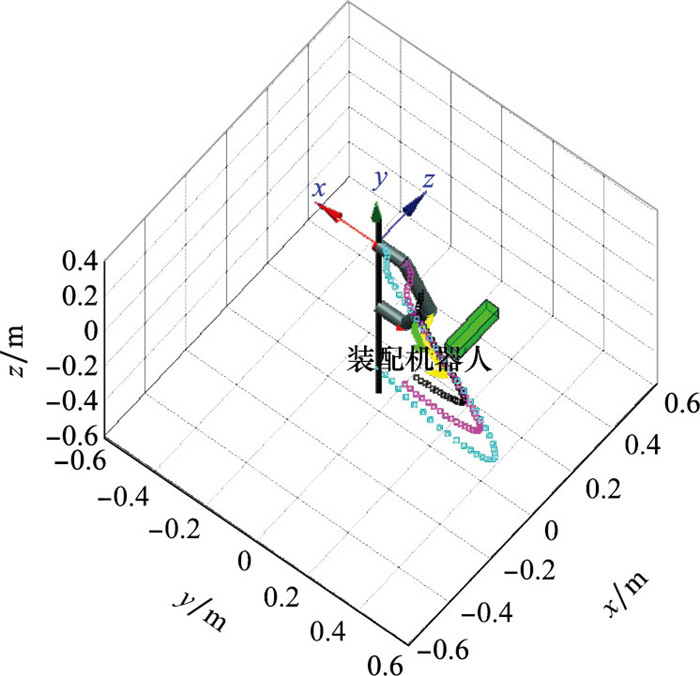
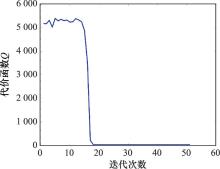
Fig.5
Cost function changes with the number of iterations (success)"
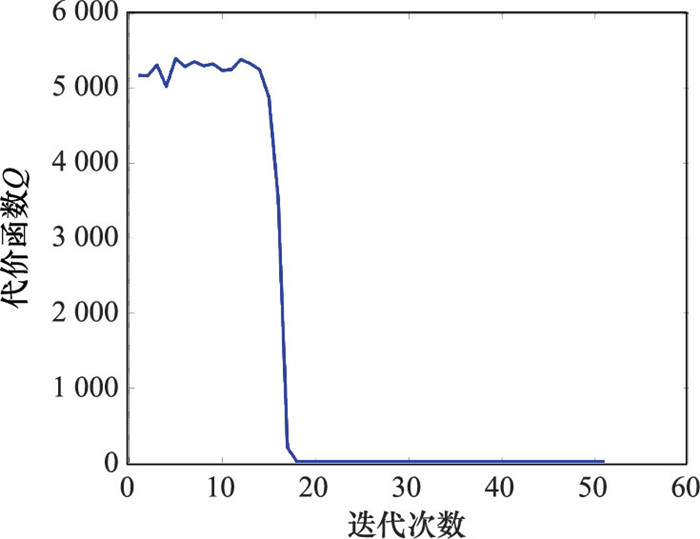

Fig.6
Cost function changes with the number of iterations (failure)"
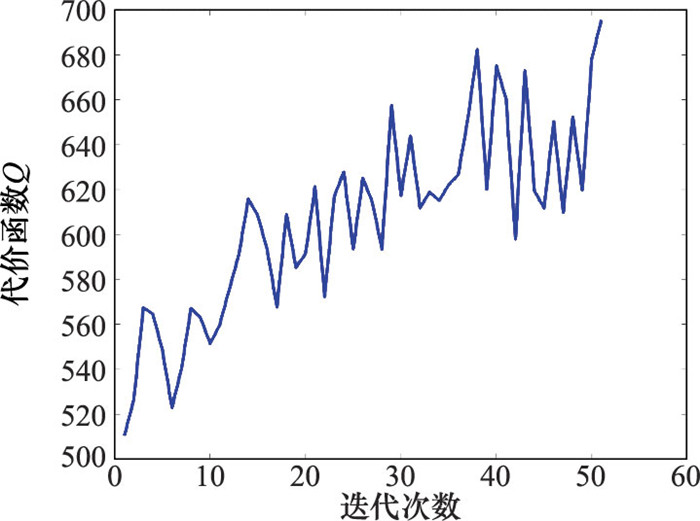

Fig.7
Cost function changes with the number of iterations of two algorithms (50 simulations)"
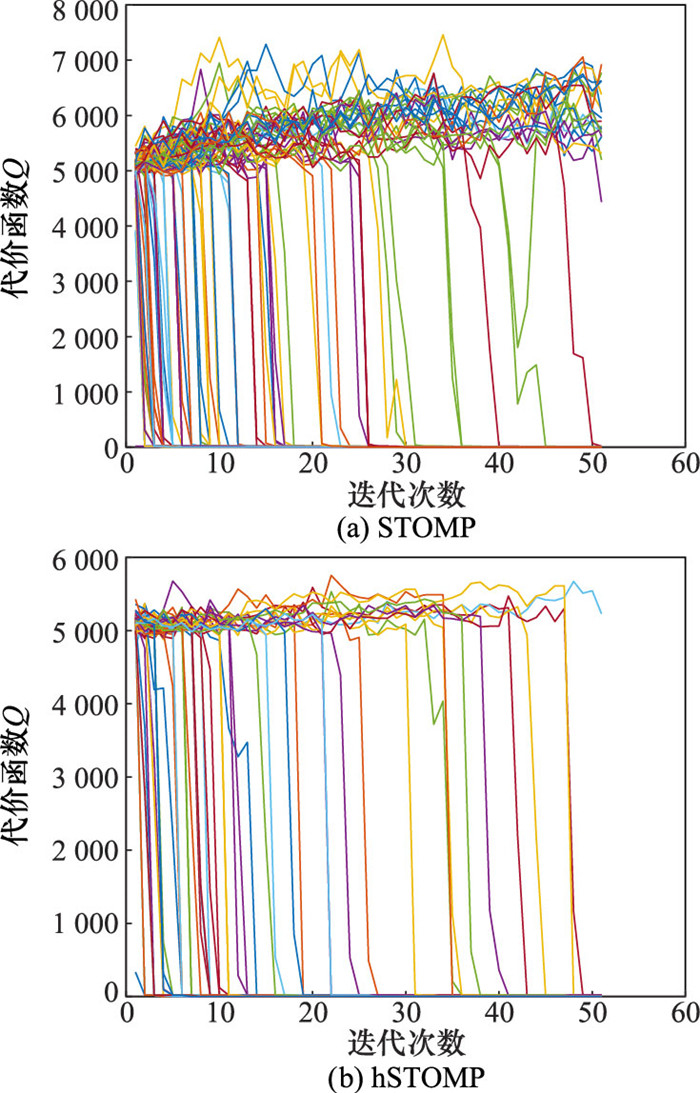
Table 3
Comparison of STOMP and hSTOMP algorithm results under 50 experiments"
| 算法结果对比 | STOMP | hSTOMP | |
| 成功次数 | 39/50 | 49/50 | |
| 平均迭代次数(总体) | 22.98 | 21.78 | |
| 平均迭代次数(成功) | 15.83 | 19.78 | |
| 平均代价函数收敛值 | 18.97 | 18.96 |
| 1 | 王雪瑶. 国外在轨服务系统最新发展(下)[J]. 国际太空, 2017, (11): 65- 69. |
| WANG X Y . Development of foreign on-orbit service systems[J]. Space International, 2017, (11): 65- 69. | |
| 2 | 谭春林, 刘永健, 于登云. 在轨维护与服务体系研究[J]. 航天器工程, 2008, 17 (3): 45- 50. |
| TAN C L , LIU Y J , YU D Y . Research on system of on-orbit spacecraft maintenance and servicing[J]. Spacecraft Engineering, 2008, 17 (3): 45- 50. | |
| 3 | 李团结, 马小飞, 华岳, 等. 大型空间天线在轨装配技术[J]. 载人航天, 2013, 19 (1): 86- 90. |
| LI T J , MA X F , HUA Y , et al. On-orbit assembly technology of large space antennas[J]. Manned Spaceflight, 2013, 19 (1): 86- 90. | |
| 4 | OEGERLE W R, PURVES L R, BUDINOFF J G, et al. Concept for a large scalable space telescope: in-space assembly[C]//Proc. of the Space Telescopes and Instrumentation I: Optical, Infrared, and Millimeter. International Society for Optics and Photonics, 2006: 755-766. |
| 5 |
CHENG Z A , HOU X , ZHANG X , et al. In-orbit assembly mission for the space solar power station[J]. Acta Astronautica, 2016, 129, 299- 308.
doi: 10.1016/j.actaastro.2016.08.019 |
| 6 |
PEIMANI N , KAMALIPOUR H . Access and forms of urbanity in public space: transit urban design beyond the global north[J]. Sustainability, 2020, 12 (8): 3495.
doi: 10.3390/su12083495 |
| 7 | WHITTAKER W, URMSON C, STARITZ P, et al. Robotics for assembly, inspection, and maintenance of space macrofacilities[C]//Proc. of the AIAA Space Conference, 2000. |
| 8 | UENO H, SATOH H, AOKI S, et al. On-orbit construction experiment by tele-operated robot arm[C]//Proc. of the Space Sciences and Technology Conference, 1997. |
| 9 | HOYT R P. SpiderFab: an architecture for self-fabricating space systems[C]//Proc. of the AIAA Space Conference and Exposition, 2013: 5509. |
| 10 | BROOKS S, GODART P, BACKES P, et al. An untethered mobile limb for modular in-space assembly[C]//Proc. of the IEEE Aerospace Conference, 2016. |
| 11 | BOWMAN L M, BELVIN W K, KOMENDERA E E, et al. In-space assembly application and technology for NASA's future science observatory and platform missions[C]//Proc. of the SPIE Space Telescopes and Instrumentation: Optical, Infrared, and Millimeter Wave, 2018: 10698. |
| 12 | 刘华军, 杨静宇, 陆建峰, 等. 移动机器人运动规划研究综述[J]. 中国工程科学, 2006, 8 (1): 85- 94. |
| LIU H J , YANG J Y , LU J F , et al. Research on mobile robots motion planning[J]. Engineering, 2006, 8 (1): 85- 94. | |
| 13 | GUO J M, LIU L, LIU Q, et al. An improvement of D * algorithm for mobile robot path planning in partial unknown envi- ronment[C]// Proc. of the 2nd International Conference on Intelligent Computation Technology & Automation, 2009: 394-397. |
| 14 |
ZHANG T , ZHU Y , SONG J Y . Real-time motion planning for mobile robots by means of artificial potential field method in unknown environment[J]. Industrial Robot: An International Journal, 2010, 37 (4): 384- 400.
doi: 10.1108/01439911011044840 |
| 15 |
TIAN L , COLLINS C . An effective robot trajectory planning method using a genetic algorithm[J]. Mechatronics, 2004, 14 (5): 455- 470.
doi: 10.1016/j.mechatronics.2003.10.001 |
| 16 |
WANG M M , LUO J J , WALTER U . Trajectory planning of free-floating space robot using particle swarm optimization (PSO)[J]. Acta Astronautica, 2015, 112, 77- 88.
doi: 10.1016/j.actaastro.2015.03.008 |
| 17 | KAVRAKI L, LATOMBE J C. Randomized preprocessing of configuration for fast path planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 1994: 2138-2145. |
| 18 | LAVALLE S M. Rapidly-exploring random trees: a new tool for path planning[R]. Iowa: Iowa State University, 1998. |
| 19 | KUFFNER J J, LAVALLE S M. RRT-connect: an efficient approach to single-query path planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, Symposia Millennium Conference, 2000: 995-1001. |
| 20 |
KARAMAN S , FRAZZOLI E . Sampling-based algorithms for optimal motion planning[J]. The international Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 21 | URMSON C, SIMMONS R. Approaches for heuristically biasing RRT growth[C]//Proc. of the IEEE/RSJ International Conference on Robots and Systems, 2003, 2: 1178-1183. |
| 22 | 冯来春, 梁华为, 杜明博, 等. 基于A * 引导域的RRT智能车辆路径规划算法[J]. 计算机系统应用, 2017, 26 (8): 127- 133. |
| FENG L C , LIANG H W , DU M B , et al. Guiding-area RRT path planning algorithm based on A * for intelligent vehicle[J]. Computer Systems & Applications, 2017, 26 (8): 127- 133. | |
| 23 | GAMMELL J D, SRINIVASA S S, BARFOOT T D. Informed RRT * : optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 2997-3004. |
| 24 | RATLIFF N, ZUCKER M, BAGNELL J A, et al. CHOMP: gradient optimization techniques for efficient motion planning[C]//Proc. of the IEEE International Conference on the Robotics and Automation, 2009: 489-494. |
| 25 | KALAKRISHNAN M, CHITTA S, THEODOROU E, et al. STOMP: stochastic trajectory optimization for motion planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 4569-4574. |
| 26 | YOON Y, RUS D. Shady3D: a robot that climbs 3D trusses[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2007: 4071-4076. |
| 27 |
JENETT B , ABDEL-RAHMAN A , CHEUNG K , et al. Material-robot system for assembly of discrete cellular structures[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4019- 4026.
doi: 10.1109/LRA.2019.2930486 |
| 28 | 游斌弟, 温晓雷, 刘育强, 等. 空间细胞机器人面向桁架在轨攀爬步态分析[J]. 宇航学报, 2020, 41 (5): 521- 530. |
| YOU B D , WEN X L , LIU Y Q , et al. Gait analysis of cellular space robot for on-orbit climbing truss[J]. Journal of Astronautics, 2020, 41 (5): 521- 530. | |
| 29 | 江励. 双手爪式模块化仿生攀爬机器人的研究[D]. 广州: 华南理工大学, 2012. |
| JIANG L. Development and analysis of a bio-inspired modular biped climbing robot[D]. Guangzhou: South China University of Technology, 2012. | |
| 30 | YE Q Z. The signed Euclidean distance transform and its applications[C]//Proc. of the IEEE 9th International Conference on Pattern Recognition, 1988: 495-499. |
| [1] | Baochen ZHANG, Jianjiang HUI, Qi ZHANG, Zhengxiong LIU, Panfeng HUANG. Touch interaction technology for obstacle avoidance motion planning of redundant manipulators [J]. Systems Engineering and Electronics, 2024, 46(1): 254-260. |
| [2] | Ying ZENG, Yanfeng LI, Hongyi WANG, Huaming QIAN, Hongzhong HUANG. Reliability analysis of industrial robot driver combining MRGP and PSO [J]. Systems Engineering and Electronics, 2023, 45(8): 2643-2650. |
| [3] | Kaifeng CHEN, Borui TIAN, Heqing LI, Chenyang ZHAO, Zuxing LU, Xinde LI, Yong DENG. Research on DDPG-based motion control of two-wheel-legged robot [J]. Systems Engineering and Electronics, 2023, 45(4): 1144-1151. |
| [4] | Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot [J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605. |
| [5] | Haojie ZHANG, Rongmin LIANG, Yudong ZHANG. Design of simulation system for UGVs based on human-in-the-loop [J]. Systems Engineering and Electronics, 2022, 44(2): 538-545. |
| [6] | An YAN, Zhang CHEN, Chaoyang DONG, Kanghui HE. Attitude balance control of two-wheeled robot based on fuzzy reinforcement learning [J]. Systems Engineering and Electronics, 2021, 43(4): 1036-1043. |
| [7] | Zhengxiong LIU, Jikang SI, Gang CHEN, Panfeng HUANG. Interaction control method of virtual simulation for hand-eye coordination in teleoperation [J]. Systems Engineering and Electronics, 2020, 42(5): 1146-1151. |
| [8] | WEI Heng, L Qiang, LIN Huican, ZHANG Yang, LIANG Jian. Survey on multi-robot SLAM back-end optimization algorithm [J]. Systems Engineering and Electronics, 2017, 39(11): 2553-2565. |
| [9] | WEI Wu, YUAN Yin-long, WANG Xin-mei. Motion state analyses for the six legged robot based on influence coefficient [J]. Systems Engineering and Electronics, 2016, 38(2): 375-381. |
| [10] | HUANG Pan-feng1,2, ZHANG Fan1,2, LIU Bin-bin1,2, MA Jun1,2. Optimal control of the rotating velocity of hub-spoke tethered space robot formation [J]. Systems Engineering and Electronics, 2015, 37(6): 1362-1369. |
| [11] | BEN Yue-yang, GUO Yan, LI Jing-chun, LI Qian, HUO Liang. Cooperative localization approach for robots based on joint distribution state-information filter [J]. Systems Engineering and Electronics, 2015, 37(2): 385-393. |
| [12] | LI Tong, JIA Qingxuan, CHEN Gang, SUN Hanxu. Motion reliability assessment of robot for trajectory tracking task [J]. Systems Engineering and Electronics, 2014, 36(12): 2556-2561. |
| [13] | HAO Da-peng,FU Wei-ping,WANG Wen. Mobile robot safe navigation based on behavior dynamics [J]. Systems Engineering and Electronics, 2014, 36(1): 136-142. |
| [14] | Wu Xiao-lin, Song Meng, Yuan Jing, Sun Feng-chi, Tao Tong. Multi-robot active SLAM under limited communication range [J]. Journal of Systems Engineering and Electronics, 2012, 34(10): 2121-2128. |
| [15] | PENG Shuang-chun, SU Fei, PAN Liang, SHEN Lin-cheng. Motion planning for highaltitude highspeed aircraft based on dynamical symmetry [J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1534-1538. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||