Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (2): 703-714.doi: 10.12305/j.issn.1001-506X.2024.02.34
• Guidance, Navigation and Control • Previous Articles
Attitude control of hypersonic vehicle with random parameter perturbations
Zhengyang LIU1, Li ZHOU1,2,*, Rui ZHANG1
- 1. School of Automation, Nanjing University of Information Science & Technology, Nanjing 210044, China
2. Jiangsu Collaborative Innovation Center of Atmospheric Environment and Equipment Technology, Nanjing 210044, China
-
Received:2023-01-16Online:2024-01-25Published:2024-02-06 -
Contact:Li ZHOU
CLC Number:
Cite this article
Zhengyang LIU, Li ZHOU, Rui ZHANG. Attitude control of hypersonic vehicle with random parameter perturbations[J]. Systems Engineering and Electronics, 2024, 46(2): 703-714.
share this article

Fig.1
Comparison of aerodynamic parameters"
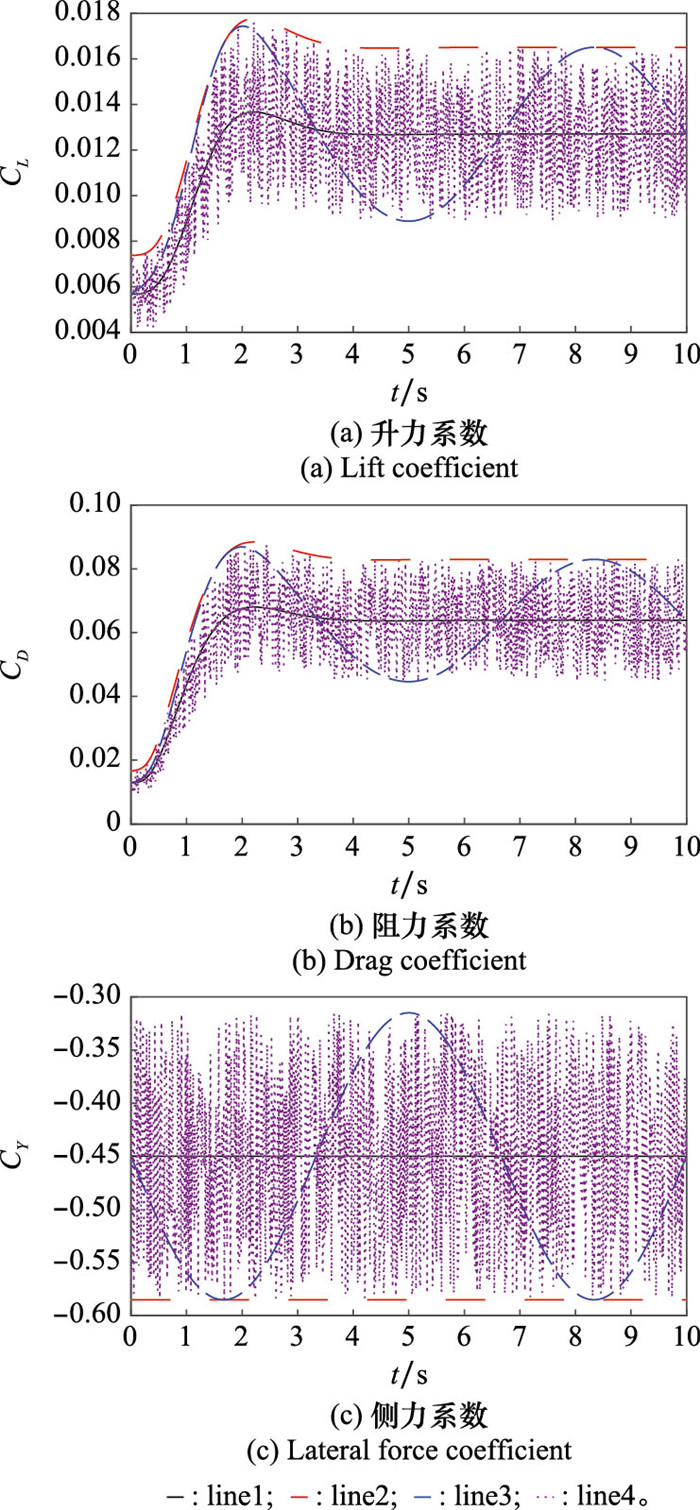

Fig.2
Structure of the control system"
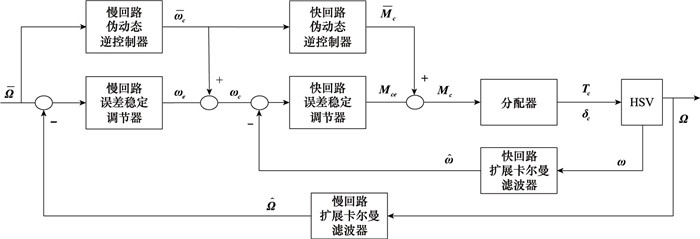
Table 1
Vehicle model parameters"
| 飞行器参数 | 取值 |
| 飞行器质量M/kg | 136 820 |
| 重力加速度g/(m/s2) | 9.8 |
| 飞行速度V/(m/s) | 2 400 |
| 倾斜角γ/(°) | 0 |
| 推力T/N | 208 000 |
| 翼面参考面积S/m2 | 334.73 |
| 动压 | 82 877 |
| 惯性矩Ixx/(kg·m2) | 915 300 |
| 惯性矩Iyy/(kg·m2) | 903 600 |
| 惯性矩Izz/(kg·m2) | 903 600 |
| 参考力矩中心Xcg/m | 4.466 8 |
| 翼展b/m | 18.288 |
| 平均气动弦长c/m | 24.384 |
Table 2
Controller parameters"
| 控制器参数 | 控制回路 | |
| 慢回路 | 快回路 | |
| Ce | ||
| pm | 5 | 5 |
| qm | 150 | 60 |
| ε | 0.8 | 0.3 |
| Tr/s | 0.02 | 0.02 |
| Ts/s | 0.001 | 0.001 |
| ωdiff/(rad/s) | 5 | 15 |
Fig.3
Attitude angle response curve"
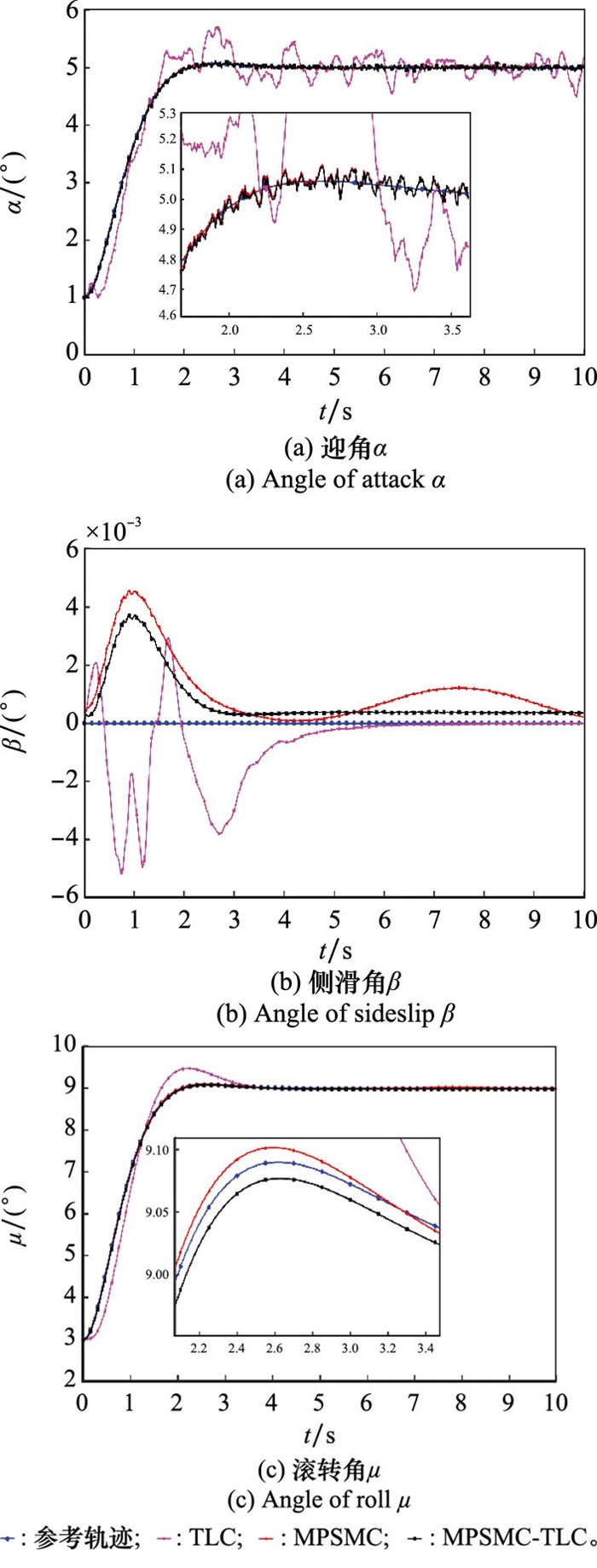
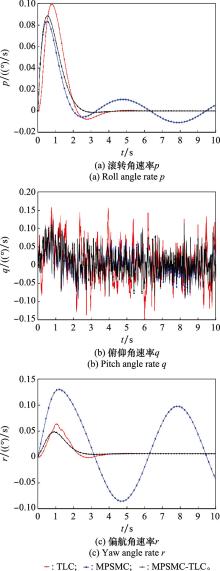
Fig.4
Attitude angle rate response curve"
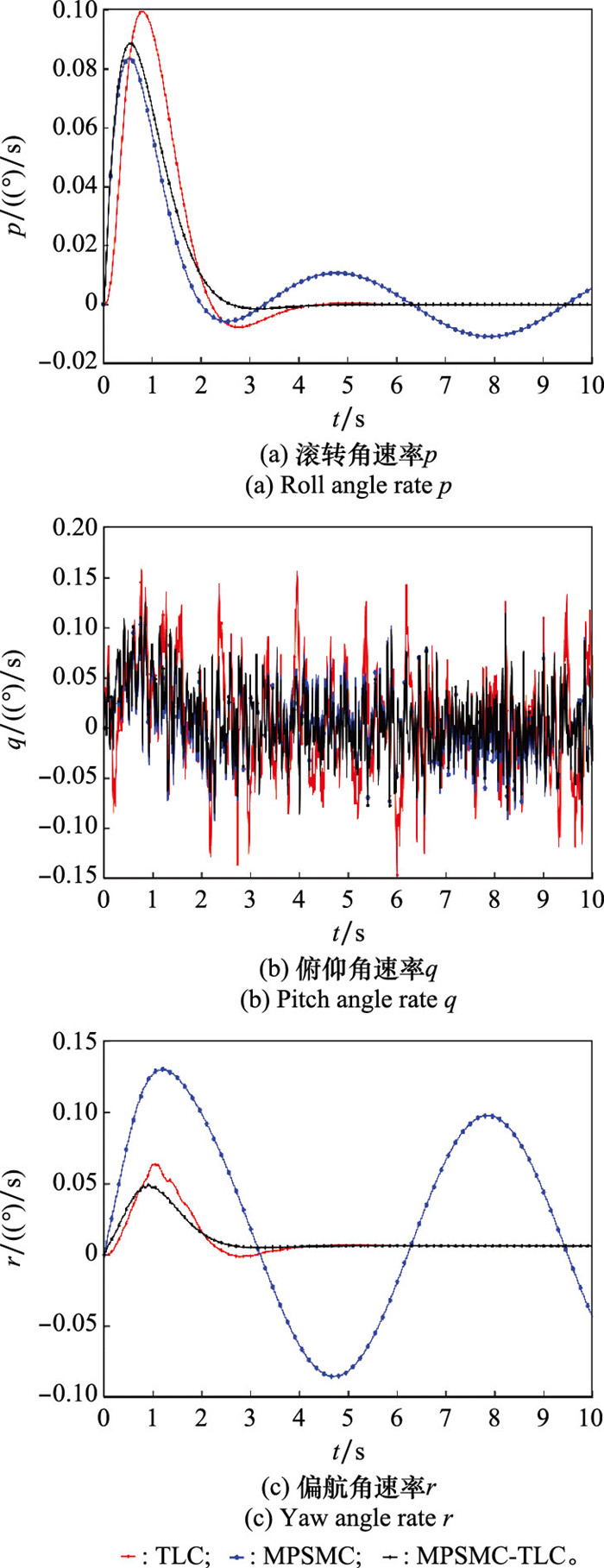

Fig.5
Rudder deflection angle response curve"

Table 3
Maximum tracking error of attitude angle and attitude angle rate"
| 参数 | MPSMC | TLC | MPSMC-TLC |
| 姿态角α/(°) | 0.086 | 0.698 | 0.093 |
| 姿态角β/(°) | 0.005 | 0.005 | 0.004 |
| 姿态角μ/(°) | 0.082 | 0.901 | 0.094 |
| 角速率p/(°/s) | 0.084 | 0.100 | 0.089 |
| 角速率q/(°/s) | 0.118 | 0.158 | 0.126 |
| 角速率r/(°/s) | 0.013 | 0.006 | 0.005 |
Table 4
Rudder surface deflection range"
| 舵面/(°) | MPSMC | TLC | MPSMC-TLC |
| δe | [-7.365, 8.484] | [-2.506, 1.522] | [-4.865, 2.117] |
| δa | [-8.197, 7.214] | [-2.089, 2.931] | [-2.039, 3.462] |
| δr | [-2.543, 2.576] | [-0.080, 0.420] | [-0.081, 0.034] |
| δx | [-0.116, 0.126] | [-0.046, 0.020] | [-0.066, 0.014] |
| δz | [-0.035, 0.037] | [-0.009, 0.004] | [-0.013, 0.003] |
| δz | [-0.003, 0.002] | [-0.002, 0.002] | [-0.003, 0.002] |
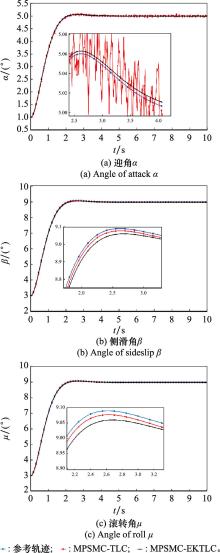
Fig.6
Attitude angle response curve"
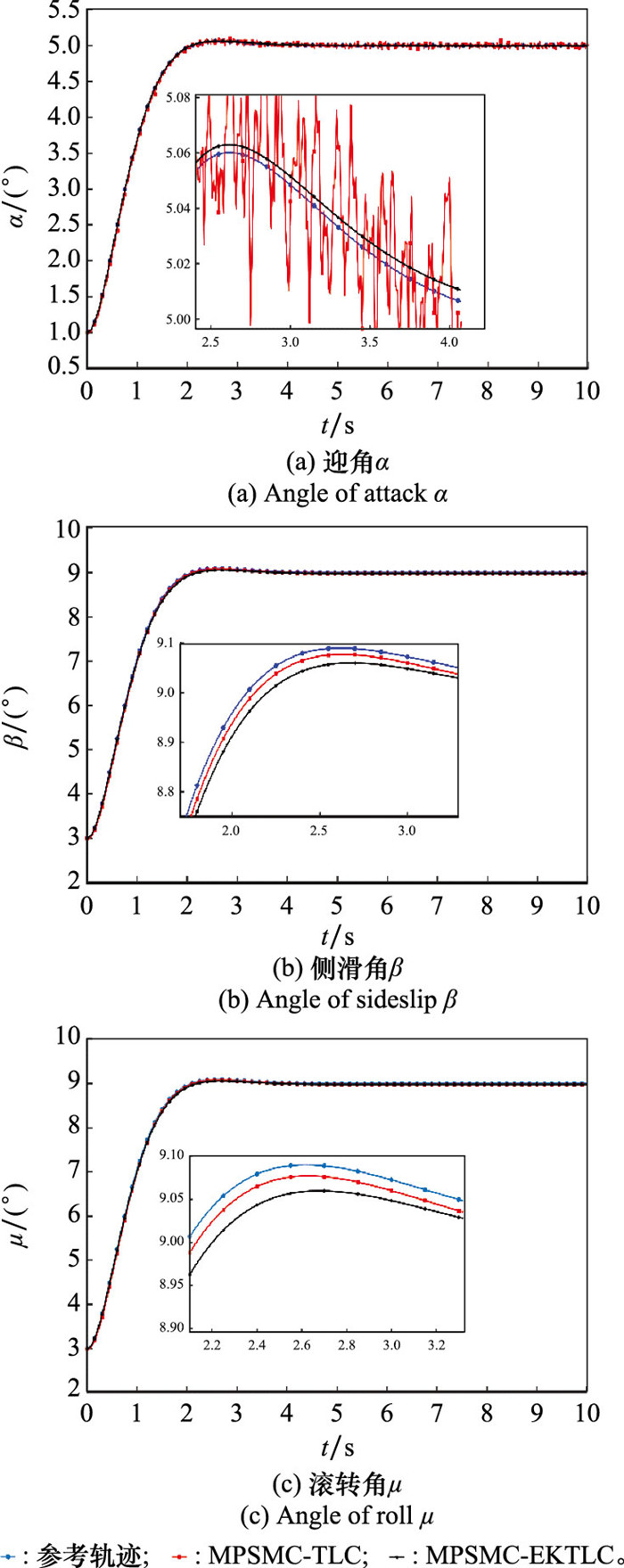
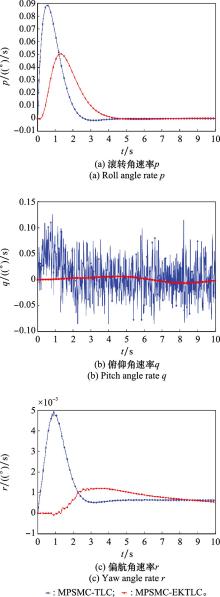
Fig.7
Attitude angle rate response curve"
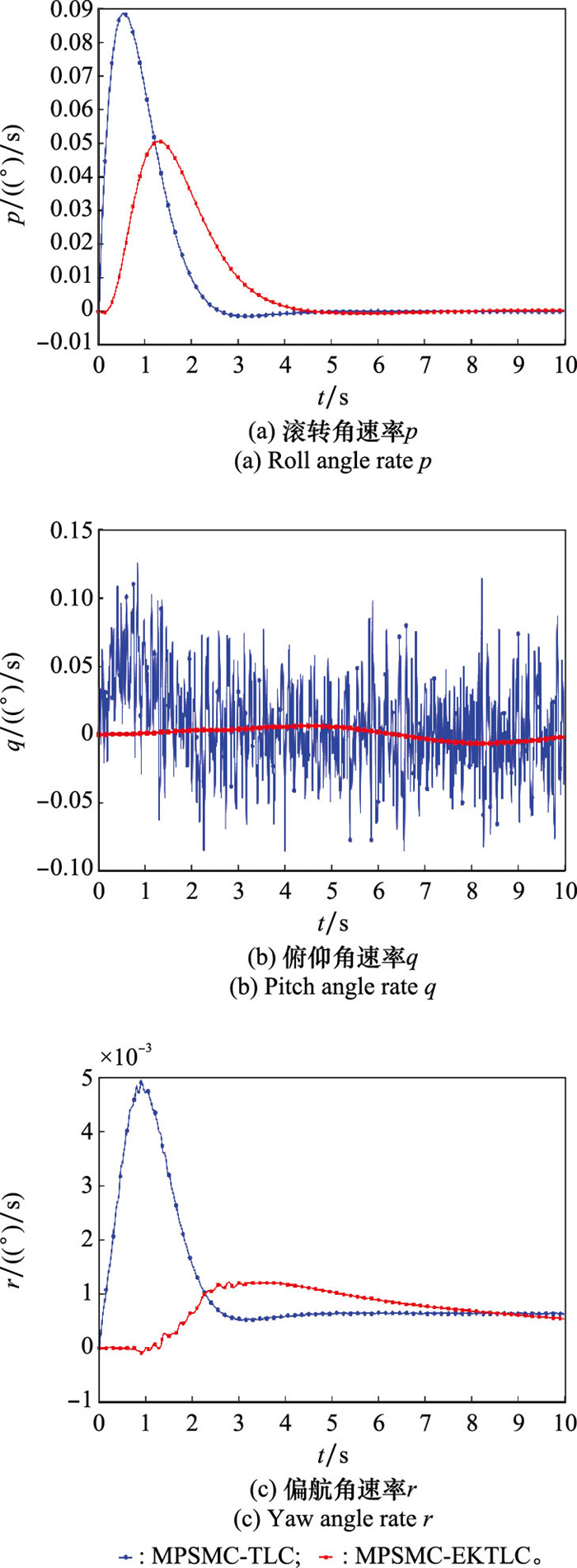

Fig.8
Rudder deflection angle response curve"

Table 5
Maximum tracking error of attitude angle and attitude angle rate"
| 参数 | MPSMC-TLC | MPSMC-EKTLC |
| 姿态角α/(°) | 0.093 | 0.004 |
| 姿态角β/(°) | 0.004 | 0.001 |
| 姿态角μ/(°) | 0.094 | 0.060 |
| 角速率p/(°/s) | 0.089 | 0.051 |
| 角速率q/(°/s) | 0.126 | 0.006 |
| 角速率r/(°/s) | 0.005 | 0.001 |
Table 6
Rudder surface deflection range"
| 舵面/(°) | MPSMC-TLC | MPSMC-EKTLC |
| δe | [-4.865, 2.117] | [-0.901,0.290] |
| δa | [-2.039,3.462] | [-0.570,0.783] |
| δr | [-0.081, 0.034] | [-0.072 0.014] |
| δx | [-0.066, 0.014] | [-0.014 0.005] |
| δz | [-0.013, 0.003] | [-0.003 0.001] |
| δz | [-0.003, 0.002] | [-0.001 0.000] |
| 1 |
DING Y B , YUE X K , CHEN G S , et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35 (7): 1- 18.
doi: 10.1016/j.cja.2021.10.037 |
| 2 |
WANG X , WEI Z , ZHANG R , et al. Autonomous reliable intelligent control design under condition monitoring mechanism: applied to hypersonic flight vehicles[J]. Control Engineering Practice, 2023, 137, 105577.
doi: 10.1016/j.conengprac.2023.105577 |
| 3 |
MA Q W , GUO J G , ZHOU J . A finite-time sliding mode control for hypersonic vehicle[J]. Transactions of the Institute of Measurement and Control, 2019, 41 (15): 4339- 4350.
doi: 10.1177/0142331219857301 |
| 4 | 董泽洪, 李颖晖, 吕茂隆, 等. 考虑输入受限的高超声速飞行器非奇异固定时间自适应切换控制[J]. 系统工程与电子技术, 2023, 45 (5): 1476- 1488. |
| DONG Z H , LI Y H , LYU M L , et al. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints[J]. Systems Engineering and Electronics, 2023, 45 (5): 1476- 1488. | |
| 5 |
张康康, 周彬, 蔡光斌, 等. 高超声速飞行器指定时间时变高增益反馈跟踪控制[J]. 自动化学报, 2023,
doi: 10.16383/j.aas.c210895 |
|
ZHANG K K , ZHOU B , CAI G B , et al. Time-varying high gain feedback tracking control for hypersonic vehicle[J]. Automatica Sinica, 2023,
doi: 10.16383/j.aas.c210895 |
|
| 6 |
QIU B B , WANG G F , FAN Y S . Trajectory linearization-based robust course keeping control of unmanned surface vehicle with disturbances and input saturation[J]. ISA Transactions, 2021, 112, 168- 175.
doi: 10.1016/j.isatra.2020.12.013 |
| 7 |
QIU B B , WANG G F , FAN Y S . Predictor LOS-based trajectory linearization control for path following of underactuated unmanned surface vehicle with input saturation[J]. Ocean Engineering, 2020, 214, 107874.
doi: 10.1016/j.oceaneng.2020.107874 |
| 8 | YAO D Q, WEI Y Y, CUI N G. Research on integrated design of guidance and control for hypersonic vehicle based on trajectory linearization control method[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2019: 450-456. |
| 9 |
LASEMI N , SHAKER H R . Spacecraft attitude control: application of fine trajectory linearization control[J]. Advances in Space Research, 2021, 68 (9): 3663- 3676.
doi: 10.1016/j.asr.2021.08.018 |
| 10 | 刘凯, 郭健, 周文雅, 等. 吸气式组合动力高超声速飞行器上升段制导方法研究[J]. 宇航学报, 2020, 41 (8): 1023- 1031. |
| LIU K , GUO J , ZHOU W Y , et al. Study on guidance method of ascending stage of air-breathing combined power hypersonic vehicle[J]. Journal of Astronautics, 2020, 41 (8): 1023- 1031. | |
| 11 |
HOSSEINPOUR J , SADATI S H , ABBASI Y . Enhanced composite nonlinear extended state observer based on trajectory linearization control in presence of external and internal distur-bance[J]. Aerospace Systems, 2023, 6 (2): 353- 364.
doi: 10.1007/s42401-023-00198-6 |
| 12 | GUO P , XU K , DENG H C , et al. Modeling and control of a hexacopter with a passive manipulator for aerial manipulation[J]. Complex & Intelligent Systems, 2021, 7 (6): 3051- 3065. |
| 13 | GALVÁ G R , VELÁZQUEZ V J E , FRIDMAN L , et al. Robust output trajectory linearization control for a class of linear time-varying systems[J]. IET Control Theory & Applications, 2021, 15 (6): 877- 889. |
| 14 |
SHEKOOFEH F J , FARUD S , MARZIEH K , et al. Tractable robust model predictive control with adaptive sliding mode for uncertain nonlinear systems[J]. International Journal of Systems Science, 2020, 51 (12): 2204- 2216.
doi: 10.1080/00207721.2020.1793230 |
| 15 |
MOUSAVI A , MARKAZI A H D . A predictive approach to adaptive fuzzy sliding-mode control of under-actuated nonlinear systems with input saturation[J]. International Journal of Systems Science, 2021, 52 (8): 1599- 1617.
doi: 10.1080/00207721.2020.1867775 |
| 16 | SEYED S T A , NAJMEH E . Feedback-based cooperative ramp metering for highway traffic flow control: a model predictive sliding mode control approach[J]. Journal of Robotics & Machine Learning, 2020, 30 (18): 8259- 8277. |
| 17 |
XIAO H L , ZHAO D Y , GAO A L , et al. Sliding mode predictive control: a survey[J]. Annual Reviews in Control, 2022, 54, 148- 166.
doi: 10.1016/j.arcontrol.2022.07.003 |
| 18 |
HUANG C , NAGHDY F , DU H P . Sliding mode predictive tracking control for uncertain steer-by-wire system[J]. Control Engineering Practice, 2019, 85, 194- 205.
doi: 10.1016/j.conengprac.2018.12.010 |
| 19 |
ZHANG Y W , ZHENG H , XU J , et al. Radial basis function model-based adaptive model predictive control for trajectory tracking of a clapping-wing micro air vehicle[J]. Aerospace, 2023, 10 (3): 253- 273.
doi: 10.3390/aerospace10030253 |
| 20 | 张远, 黄旭, 路坤锋, 等. 高超声速飞行器控制技术研究进展与展望[J]. 宇航学报, 2022, 43 (7): 866- 879. |
| ZHANG Y , HUANG X , LU K F , et al. Research progress and prospect of hypersonic vehicle control technology[J]. Journal of Astronautics, 2022, 43 (7): 866- 879. | |
| 21 |
YOUSSEF M , AYMAN E B . Sliding mode control of directly excited structural dynamic model of twin-tailed fighter aircraft[J]. Journal of the Franklin Institute, 2021, 358 (18): 9721- 9740.
doi: 10.1016/j.jfranklin.2021.10.017 |
| 22 | 闫晓辉. 随机干扰下的近空间飞行器鲁棒控制[D]. 南京: 南京航空航天大学, 2020. |
| YAN X H. Robust control of near-space vehicle under random interference[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020. | |
| 23 |
LIU Y B , TONG Y H , JIN F T . Control law design of hypersonic vehicles using the elastic surrogate model[J]. Journal of Low Frequency Noise, Vibration and Active Control, 2020, 39 (1): 216- 229.
doi: 10.1177/1461348419835131 |
| 24 |
LIU L T , TIAN B W . Comprehensive engineering frequency domain analysis and vibration suppression of flexible aircraft based on active disturbance rejection controller[J]. Sensors, 2022, 22 (16): 6207- 6226.
doi: 10.3390/s22166207 |
| 25 |
ZHOU Z , WANG Z A , GONG Z , et al. Design of thrust vectoring vertical/short takeoff and landing aircraft stability augmentation controller based on L1 adaptive control law[J]. Symmetry, 2022, 14 (9): 1837- 1851.
doi: 10.3390/sym14091837 |
| 26 | FELIX B , HARALD P . Finite horizon analysis of autolanded aircraft in final approach under crosswind[J]. Control Engineering Practice, 2022, 122, 105105. |
| 27 | 曹瑞, 刘燕斌, 陆宇平. 基于马尔可夫蒙特卡罗法的系统辨识方法研究及应用[J]. 宇航学报, 2022, 43 (4): 423- 433. |
| CAO R , LIU Y B , LU Y P . Research and application of system identification method based on Markov chain Monte Carlo method[J]. Journal of Astronautics, 2022, 43 (4): 423- 433. | |
| 28 |
TATSUYA T , SHINTARO N , HISASHI D . Clustering method for Monte Carlo model predictive control[J]. IFAC Papers OnLine, 2021, 54 (14): 251- 256.
doi: 10.1016/j.ifacol.2021.10.361 |
| 29 | BETHGE J, YU S Y, FINDEISEN R. Model predictive control with guarantees for discrete linear stochastic systems subject to additive disturbances with chance constraints[C]//Proc. of the IEEE American Control Conference, 2020: 1943-1948. |
| 30 | 孙经广, 宋申民, 陈海涛, 等. 高超声速飞行器有限时间饱和跟踪控制[J]. 控制理论与应用, 2017, 34 (10): 1349- 1360. |
| SUN J G , SONG S M , CHEN H T , et al. Finite time saturation tracking control for hypersonic vehicle[J]. Control Theory and Applications, 2017, 34 (10): 1349- 1360. |
| [1] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [2] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [3] | Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations [J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212. |
| [4] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [5] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [6] | YUAN Guogang, WANG Yongchuan, CHEN Peng, GAO Xijun. Demodulation of CD3S signals based on DEKF joint estimation [J]. Systems Engineering and Electronics, 2018, 40(9): 2119-2123. |
| [7] | LU Zhiyi, LI Xiangping, CHEN Qi, ZOU Xiaohai. Kalman filtering decoupling algorithm based on particle swarm optimization [J]. Systems Engineering and Electronics, 2018, 40(4): 751-755. |
| [8] | XU Zhaoxin, LI Hangzhou, LI Liang, ZHAO Lin, LIU Ya. EKF/SF-based short-baseline BDS multipath mitigation method [J]. Systems Engineering and Electronics, 2017, 39(6): 1334-1340. |
| [9] | WEI Heng, L Qiang, LIN Huican, ZHANG Yang, LIANG Jian. Survey on multi-robot SLAM back-end optimization algorithm [J]. Systems Engineering and Electronics, 2017, 39(11): 2553-2565. |
| [10] | SUN Huadong, YU Jianqiao, MEI Yuesong. Control of wrap-around fin rolling missiles based on#br# Lipschitz adaptive trajectory linearization [J]. Systems Engineering and Electronics, 2017, 39(1): 162-167. |
| [11] | LI Guo-hui,LI Ya-an,YANG Hong. Filtering method of new chaotic system based on EKF [J]. Systems Engineering and Electronics, 2013, 35(9): 1830-1835. |
| [12] | GAO Wei, LIN Xing-chen, WANG Qiu-ying, BEN Yue-yang. FOG on line calibration assisted by CCD star sensor [J]. Journal of Systems Engineering and Electronics, 2012, 34(8): 1680-1684. |
| [13] | LI Xue-song, LI Ying-hui, LI Xia, PENG Jian-liang, LI Chao-xu. Robust trajectory linearization control design for unmanned aerial vehicle path following [J]. Journal of Systems Engineering and Electronics, 2012, 34(4): 767-772. |
| [14] | CHENG Shui-ying, YU Li. Algorithm realization and its application evaluation of the iterated unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2546-2553. |
| [15] | GAO Wei, ZHANG Xin, YU Fei, FENG Jin. Fast alignment method of SINS using measurement augmentation [J]. Journal of Systems Engineering and Electronics, 2011, 33(11): 2492-2495. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||