Systems Engineering and Electronics ›› 2023, Vol. 46 ›› Issue (1): 137-142.doi: 10.12305/j.issn.1001-506X.2024.01.16
• Sensors and Signal Processing • Previous Articles
ECEF-GLS estimation algorithm based on fading factor
Yunlong DONG1, Yan ZHANG1,2,*
- 1. Information Fusion Research Institute, Naval Aviation University, Yantai 264001, China
2. Unit 32654 of the PLA, Jinan 250000, China
-
Received:2022-03-08Online:2023-12-28Published:2024-01-11 -
Contact:Yan ZHANG
CLC Number:
Cite this article
Yunlong DONG, Yan ZHANG. ECEF-GLS estimation algorithm based on fading factor[J]. Systems Engineering and Electronics, 2023, 46(1): 137-142.
share this article
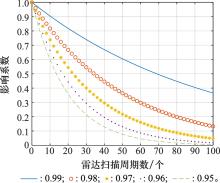
Fig.1
Curve of influence coefficient ρk corresponding to different fading factors in different scanning periods"
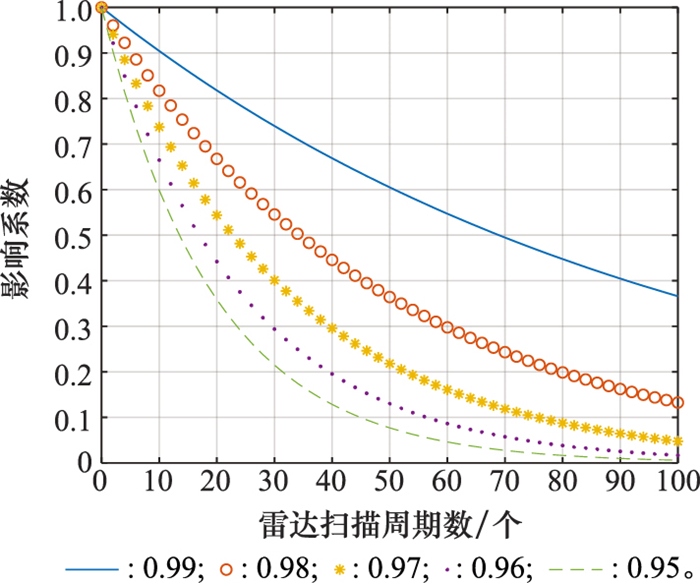
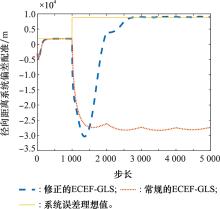
Fig.2
Tracking effect of range system deviation of radar A (experiment 1)"

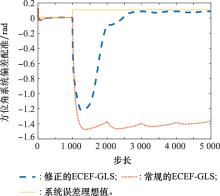
Fig.3
Tracking effect of azimuth system deviation of radar A (experiment 1)"
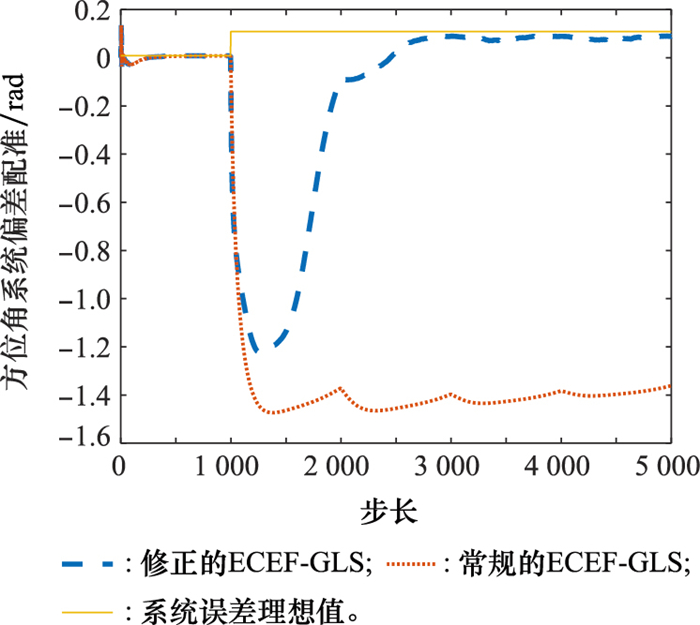
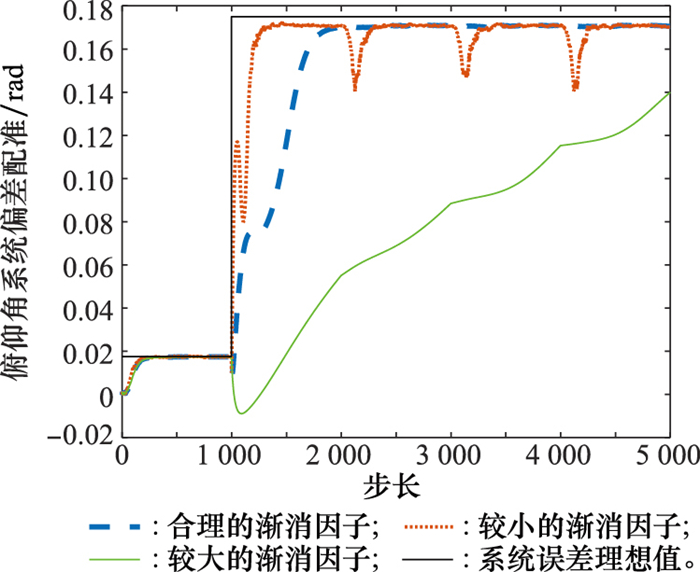
Fig.4
Tracking effect of pitching angle system deviation of radar A (experiment 1)"


Fig.5
Tracking effect of range system deviation of radar B (experiment 1)"
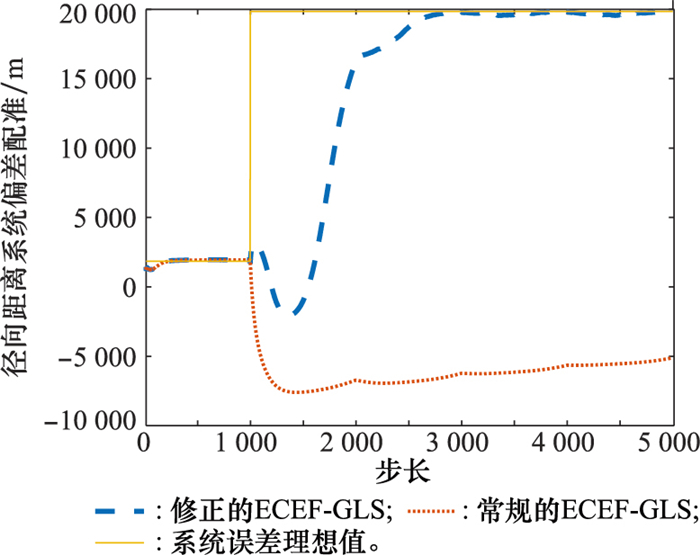

Fig.6
Tracking effect of azimuth system deviation of radar B (experiment 1)"
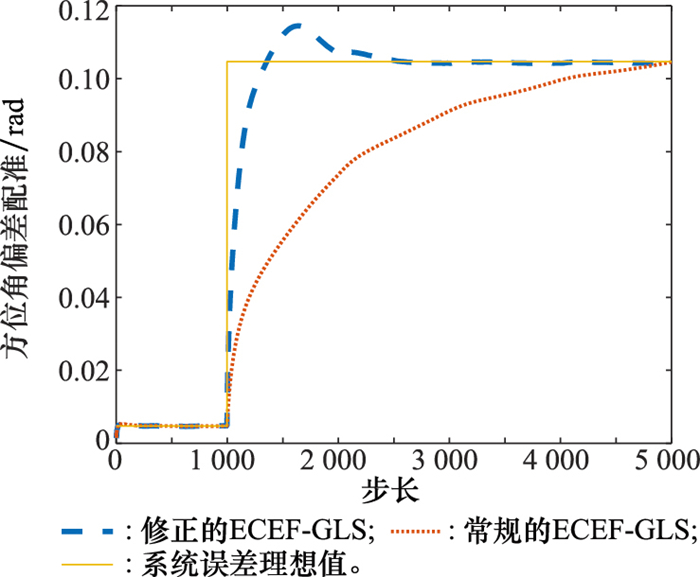
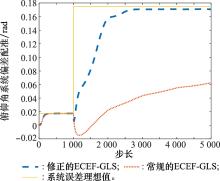
Fig.7
Tracking effect of pitching angle system deviation of radar B (experiment 1)"
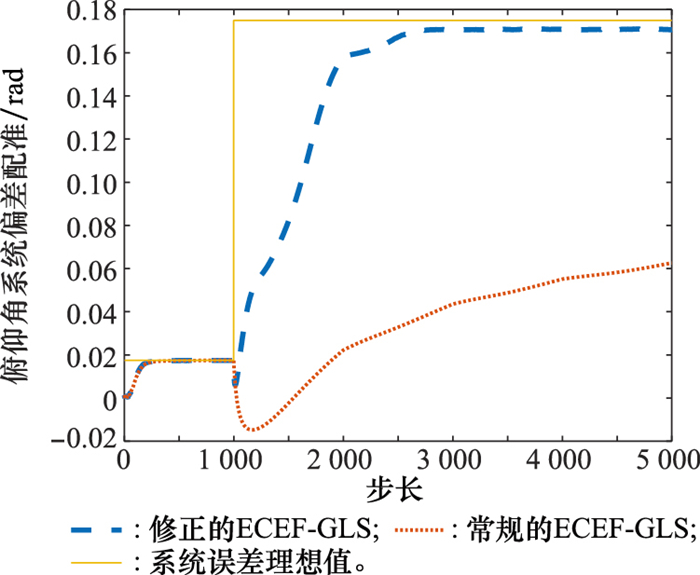
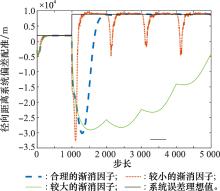
Fig.8
Tracking effect of range system deviation of radar A (experiment 2)"

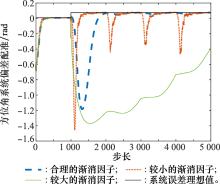
Fig.9
Tracking effect of azimuth system deviation of radar A (experiment 2)"
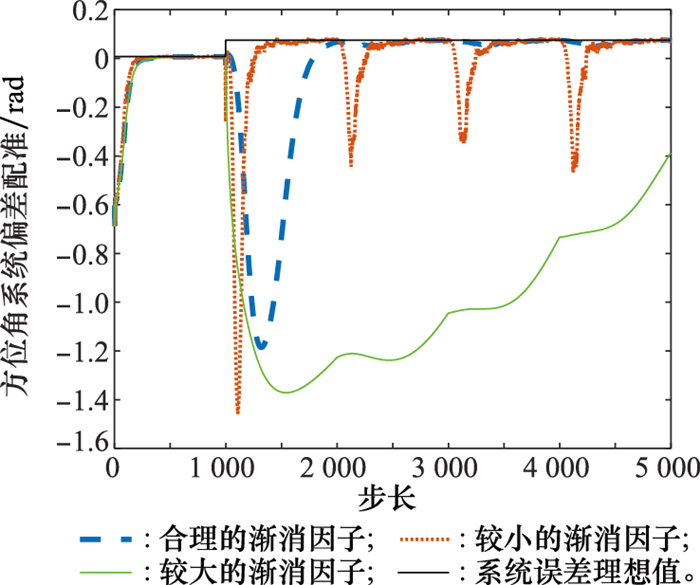

Fig.10
Tracking effect of pitching angle system deviation of radar A (experiment 2)"

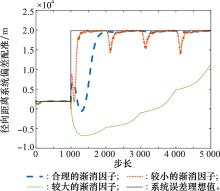
Fig.11
Tracking effect of range system deviation of radar B (experiment 2)"
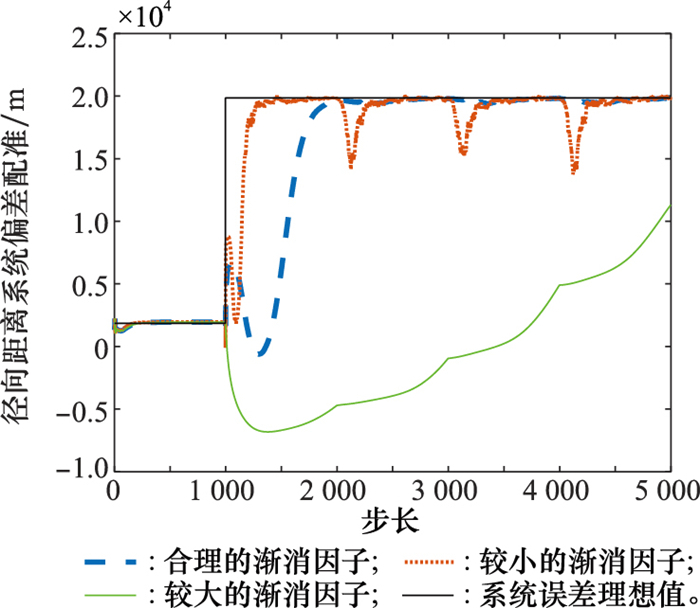
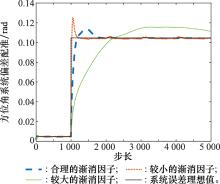
Fig.12
Tracking effect of azimuth system deviation of radar B (experiment 2)"


Fig.13
Tracking effect of pitching angle system deviation of radar B (experiment 2)"
| 1 | 吴怡. 雷达组网误差配准与目标跟踪算法研究[D]. 上海: 上海交通大学, 2020. |
| WU Y. Radar networking error registration and target tracking algorithm research[D]. Shanghai: Shanghai Jiao Tong University, 2020. | |
| 2 | 李云双, 杨宁, 李冬霞, 等. ADS-B系统监视性能评估研究与验证[J]. 现代电子技术, 2022, 45 (5): 19- 24. |
| LI Y S , YANG N , LI D X , et al. ADS-B system monitoring performance evaluation research and validation[J]. Journal of Modern Electronic Technology, 2022, 45 (5): 19- 24. | |
| 3 | 费海凤. 基于星载AIS和ADS-B的目标监视系统关键技术研究[D]. 南京: 南京理工大学, 2022. |
| FEI H F. Research on key technologies of target monitoring system based on spaceborne AIS and ADS-B[D]. Nanjing: Nanjing University of Science and Technology, 2022. | |
| 4 | 王晴. AIS信号与ADS-B信号分离算法的研究[D]. 南京: 南京理工大学, 2023. |
| WANG Q. Research on the separation algorithm of AIS signal and ADS-B signal[D]. Nanjing: Nanjing University of Science and Technology, 2023. | |
| 5 | 李佳晟. 基于多元特征的ADS-B异常检测关键技术研究[D]. 成都: 电子科技大学, 2023. |
| LI J S. Research on key techniques of ADS-B anomaly detection based on multivariate features[D]. Chengdu: University of Electronic Science and Technology of China, 2023. | |
| 6 | 李宝鹏, 王守权, 朱艳慧, 等. 便携式ADS-B目标航迹信息采集及实时显示系统[J]. 自动化与仪表, 2023, 38 (5): 67-70, 124. |
| LI B P , WANG S Q , ZHU Y H , et al. Portable ADS-B target track information acquisition and real-time display system[J]. Automation & Instrumentation, 2023, 38 (5): 67-70, 124. | |
| 7 | 王伟, 赵洪宇, 史伟. 基于非合作目标的误差配准算法[J]. 电光与控制, 2014, 21 (1): 38- 41. |
| WANG W , ZHAO H Y , SHI W . Error registration algorithm based on non-cooperative target[J]. Electronics Optics & Control, 2014, 21 (1): 38- 41. | |
| 8 | BURK J. The SAGE real quality control fraction and its interface with BUIC Ⅲ[R]. Virginia: MITRE Corporation, 1966. |
| 9 |
ZHOU Y , LEUNG H , BLANCHETTE M . Sensor alignment with Earth-centered Earth-fixed(ECEF) coordinate system[J]. IEEE Trans.on Aerospace and Electronic Systems, 1999, 35 (2): 410- 418.
doi: 10.1109/7.766925 |
| 10 | 董云龙, 何友, 王国宏, 等. 基于ECEF的广义最小二乘误差配准技术[J]. 航空学报, 2006, 27 (3): 463- 467. |
| DONG Y L , HE Y , WANG G H , et al. Generalized least squares registration algorithm with earth-centered earth-fixed (ECEF) coordinate system[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27 (3): 463- 467. | |
| 11 | 李家强, 赵春艳, 陈金立, 等. WGS-84坐标系下改进的广义最小二乘配准算法[J]. 上海: 上海交通大学学报, 2016, 50 (5): 771- 775. |
| LI J Q , ZHAO C Y , CHEN J L , et al. Improved generalized least squares registration algorithm in WGS-84 coordinate system[J]. Shanghai: Journal of Shanghai Jiao Tong University, 2016, 50 (5): 771- 775. | |
| 12 | 董云龙, 何友, 王国宏. 一种新的雷达组网实时误差配准算法[J]. 南京航空航天大学学报, 2005, 37 (3): 330- 334. |
| DONG Y L , HE Y , WANG G H . A new real-time error registration algorithm for radar networking[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2005, 37 (3): 330- 334. | |
| 13 | 宋强, 何友, 董云龙. 一种目标状态与系统偏差的联合估计算法[J]. 弹箭与制导学报, 2007, (4): 312-315, 322. |
| SONG Q , HE Y , DONG Y L . An joint estimation algorithm for state and systematic errors[J]. Journal of Projectiles, Arrows and Guidance, 2007, (4): 312-315, 322. | |
| 14 | 程然, 何科峰. 基于CKF的联合扩维误差配准算法[J]. 航空科学技术, 2018, 29 (5): 66- 73. |
| CHENG R , HE K F . Joint extended dimension error registration algorithm basedon CKF[J]. Aeronautical Science and Technology, 2018, 29 (5): 66- 73. | |
| 15 | 原常弘. 联合ADS-B的雷达系统误差配准技术研究[D]. 广州: 南方医科大学, 2020. |
| YUAN C H. A new method for radar sy-stem error registration based on ADS-B[D]. Guangzhou: Southern Medical University, 2020. | |
| 16 | LI S , CHENG Y M , GOU B , et al. Sequential unbiased converted measurement non-linear filter with range rate in ECEF coordinates[J]. IET Radar, Sonar & Navigation, 2020, 14 (7): 111- 1124. |
| 17 |
KRZYZEK R , SKORUPA B . The influence of application a simplified transformation model between reference frames ECEF and ECI onto prediction accuracy of position and velocity of GLONASS satellites[J]. Reports on Geodesy and Geoinformatics, 2015, 99 (1): 19- 27.
doi: 10.2478/rgg-2015-0009 |
| 18 |
WU W , JIANG J , LIU W J , et al. A sequential converted measurement Kalman filter in the ECEF coordinate system for airborne Doppler radar[J]. Aerospace Science and Technology, 2016, 51, 11- 17.
doi: 10.1016/j.ast.2016.01.008 |
| 19 | WU W H , JIANG J , FENG X , et al. A sequential converted measurement Kalman filter with Doppler measurements in ECEF coordinate system[J]. Chinese Journal of Electronics, 2016, 25 (1): 139- 145. |
| [1] | Ran LAI, Gang SUN, Wei ZHANG, Tao ZHANG. Space-time moving target parameter estimation algorithm based on non-convex relaxation of atomic norm [J]. Systems Engineering and Electronics, 2023, 45(9): 2761-2767. |
| [2] | Rui ZHANG, Yueyang BEN, Liqiang LIU, Kun WANG, Liang HOU, Tian QIU. Field calibration method of full state variables for strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2023, 45(8): 2521-2532. |
| [3] | Lihua YANG, Lulu REN, Bo HU, Yongqi SHAO, Qian NIE. Meta-learning based time-varying channel estimation method [J]. Systems Engineering and Electronics, 2023, 45(6): 1872-1879. |
| [4] | Yuqing ZHENG, Xiaofeng AI, Zhiming XU, Feng ZHAO, Yong YANG. Target parameters estimation of FSR net based on crossing times [J]. Systems Engineering and Electronics, 2023, 45(5): 1323-1332. |
| [5] | Yuchao YANG, Ming FANG, Chenfan ZHAO, Gang FANG. Long-time coherent integration algorithm for high-speed maneuvering targets [J]. Systems Engineering and Electronics, 2023, 45(5): 1359-1370. |
| [6] | Xiaofei LU, Shuojing JIN, Ling HONG, Fengzhou DAI. Target micro-Doppler analysis of TVAR model based on clustering [J]. Systems Engineering and Electronics, 2023, 45(3): 660-668. |
| [7] | Zhixing LIU, Yinghui QUAN, Minghui SHA, Wen FANG, Xia GAO, Mengdao XING. Target parameter estimation method for frequency agility and pulse repetition frequency agility radar [J]. Systems Engineering and Electronics, 2023, 45(2): 401-406. |
| [8] | Shihui WU, Yu ZHOU, Zhengxin LI, Xiaodong LIU, Bo HE. Approach to simulation optimization of time-varying parameters system based on neural network [J]. Systems Engineering and Electronics, 2023, 45(2): 472-480. |
| [9] | Zhengda CUI, Mingying WEI, Yunqian LI. Semi-analytical encounter time estimation method in dive phase with time-varying drag coefficient [J]. Systems Engineering and Electronics, 2023, 45(2): 530-537. |
| [10] | Fan ZHANG, Runcao TIAN, Peng WANG, Lei DONG. Multi-stress accelerated life evaluation method considering generalized coupling [J]. Systems Engineering and Electronics, 2023, 45(10): 3350-3361. |
| [11] | Qian NIE, Lihua YANG, Bo HU, Lulu REN. Time-varying channel prediction method based on LSTM neural networks under basis expansion model [J]. Systems Engineering and Electronics, 2022, 44(9): 2971-2977. |
| [12] | Yili HU, Yongbo ZHAO, Sheng CHEN, Ben NIU. Decoherence of conformal electromagnetic vector sensor array by double interpolation fitting method [J]. Systems Engineering and Electronics, 2022, 44(8): 2393-2402. |
| [13] | Yuanyi XIONG, Wenchong XIE. Adaptive iterative monopulse estimation method based on space-time constraint [J]. Systems Engineering and Electronics, 2022, 44(8): 2506-2514. |
| [14] | Yan JIN, Dadi ZHAO, Hongbing JI. Parameter estimation of LFM signals based on NAT functions in impulsive noise [J]. Systems Engineering and Electronics, 2022, 44(3): 762-770. |
| [15] | Jie ZHANG, Lihua YANG, Qian NIE. Novel time-varying channel prediction method based on stacked ELM [J]. Systems Engineering and Electronics, 2022, 44(2): 662-667. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||