
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (5): 1626-1635.doi: 10.12305/j.issn.1001-506X.2022.05.24
罗世彬1, 李晓栋1, 王忠森1, 徐骋2,*
收稿日期:2021-07-15
出版日期:2022-05-01
发布日期:2022-05-16
通讯作者:
徐骋
作者简介:罗世彬(1976—), 男, 教授, 博士, 主要研究方向为高超声速气动设计、机体/发动机一体化、宽速域飞行器设计、飞行器多学科设计优化|李晓栋(1996—), 男, 硕士, 主要研究方向为运载火箭姿态控制|王忠森(1997—), 男, 硕士研究生, 主要研究方向为高超声速滑翔飞行器姿态容错控制|徐骋(1980—), 男, 研究员, 博士, 主要研究方向为导航制导与控制技术
Shibin LUO1, Xiaodong LI1, Zhongsen WANG1, Cheng XU2,*
Received:2021-07-15
Online:2022-05-01
Published:2022-05-16
Contact:
Cheng XU
摘要:
针对受模型不确定和外部干扰影响的并联式运载器上升段姿态控制问题, 提出了一种基于广义超螺旋算法的自适应滑模有限时间控制方法。首先, 将姿态跟踪控制问题转化为跟踪误差系统的镇定问题, 建立了面向控制的模型。其次, 将单输入单输出(single input single output, SISO)固定时间广义超螺旋算法拓展应用到多输入多输出(multiple input multiple output, MIMO)耦合非线性系统上, 基于该算法设计了固定时间状态观测器和自适应滑模有限时间控制器, 利用Lyapunov稳定性理论证明了闭环系统的有限时间稳定特性。最后, 通过与传统比例-微分(proportional and differential, PD)控制器仿真对比, 验证了该方法具有更优的控制精度和鲁棒性。
中图分类号:
罗世彬, 李晓栋, 王忠森, 徐骋. 并联式运载器上升段广义超螺旋有限时间控制[J]. 系统工程与电子技术, 2022, 44(5): 1626-1635.
Shibin LUO, Xiaodong LI, Zhongsen WANG, Cheng XU. Generalized super-twisting finite-time control for the ascent phase of parallel carrier[J]. Systems Engineering and Electronics, 2022, 44(5): 1626-1635.
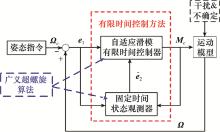
图1
控制系统结构"

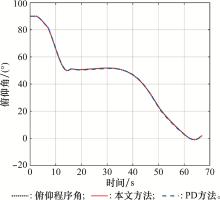
图2
俯仰角跟踪"

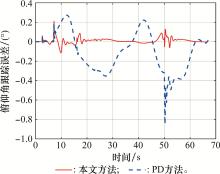
图3
俯仰角跟踪误差"
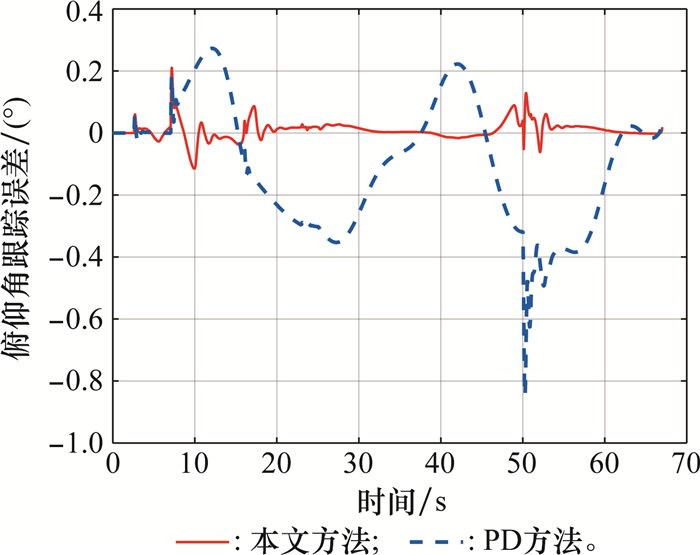
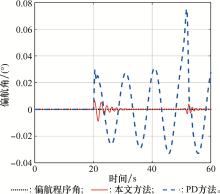
图4
偏航角跟踪"

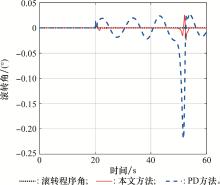
图5
滚转角跟踪"

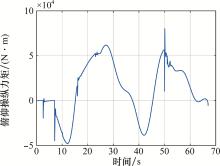
图6
俯仰操纵力矩"

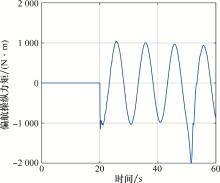
图7
偏航操纵力矩"

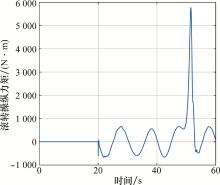
图8
滚转操纵力矩"

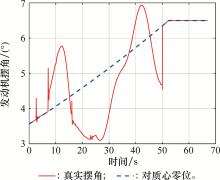
图9
发动机摆角"

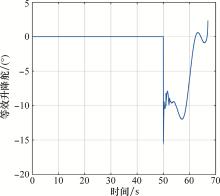
图10
升降舵偏角"

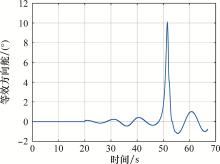
图11
方向舵偏角"

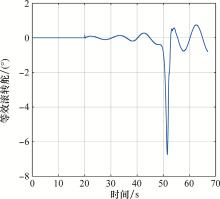
图12
滚转舵偏角"
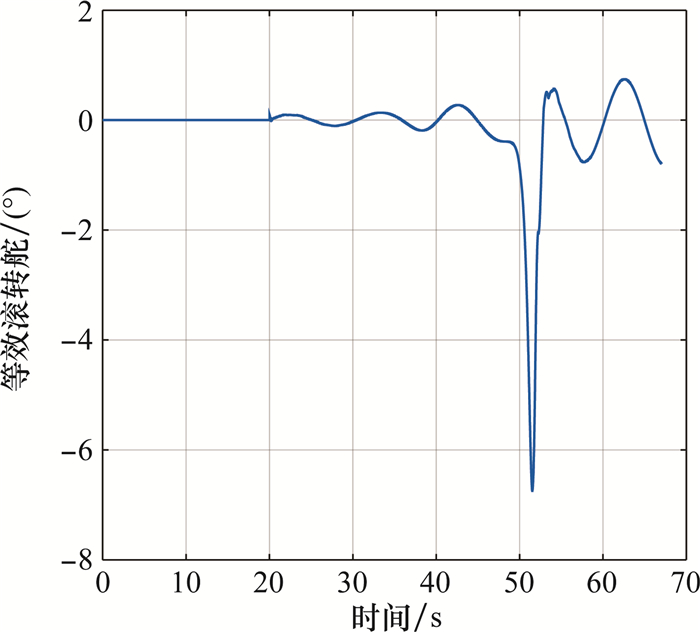
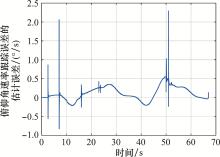
图13
俯仰角速率跟踪误差的估计误差"

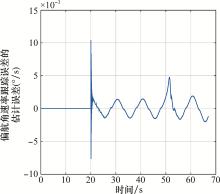
图14
偏航角速率跟踪误差的估计误差"

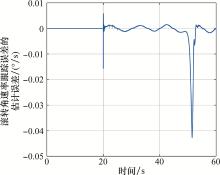
图15
滚转角速率跟踪误差的估计误差"

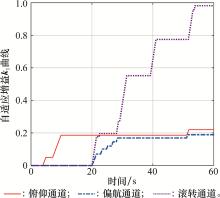
图16
自适应增益k1"


图17
自适应增益k2"

| 1 |
BRIESE L E , ACQUATELLA P , SCHNEPPER K . Multidisciplinary modeling and simulation framework for launch vehicle system dynamics and control[J]. Acta Astronautica, 2020, 170, 652- 664.
doi: 10.1016/j.actaastro.2019.08.022 |
| 2 | 尹永鑫, 杨明, 王子才. 并联式运载器的垂直发射建模与控制[J]. 北京航空航天大学学报, 2008, 34 (4): 369- 372, 376. |
| YI Y X , YANG M , WANG Z C . Vertical launch modeling and control of parallel carrier[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34 (4): 369- 372, 376. | |
| 3 |
SHTESSEL Y , HALL C , JACKSON M . Reusable launch vehicle control in multiple time scale sliding modes[J]. Journal of Guidance, Control, and Dynamics, 2000, 23 (6): 1013- 1020.
doi: 10.2514/2.4669 |
| 4 |
GAO Z F , JIANG B , SHI P , et al. Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J]. Journal of the Franklin Institute, 2012, 349 (4): 1543- 1560.
doi: 10.1016/j.jfranklin.2011.11.003 |
| 5 | MAO Q , DOU L Q , YANG Z S , et al. Fuzzy disturbance observer-based adaptive sliding mode control for reusable launch vehicles with aeroservoelastic characteristic[J]. IEEE Trans.on Industrial Informatics, 2019, 16 (2): 1214- 1223. |
| 6 | SARKAR R, MUKHERJEE J, PATIL D, et al. Artificial time delay based adaptive robust fault tolerant control for RLV during re-entry phase[C]//Proc. of the IEEE 28th Mediterranean Conference on Control and Automation, 2020: 56-61. |
| 7 |
NGUYEN N P , MUNG N X , THANH H L N N , et al. Adaptive sliding mode control for attitude and altitude system of a quadcopter UAV via neural network[J]. IEEE Access, 2021, 9, 40076- 40085.
doi: 10.1109/ACCESS.2021.3064883 |
| 8 |
SONG X J , YUE B Z , WU W J . Investigation on attitude disturbance control and vibration suppression for fuel-filled flexible spacecraft[J]. Acta Mechanica Sinica, 2015, 31 (4): 581- 588.
doi: 10.1007/s10409-015-0431-8 |
| 9 | WANG Z, WANG Q, ZHANG X J. An adaptive fuzzy sliding-mode technique for attitude control of launch vehicle[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2007: 1587-1592. |
| 10 | ARUN K V V , LAILA B M . Adaptive backstepping sliding mode control for roll channel of launch vehicle[J]. International Journal of Aeronautical Science and Aerospace Research, 2015, 2 (5): 58- 64. |
| 11 | TURNER B J, WILLIAMS J R, SHTESSEL Y B. Integral sliding mode autopilot for rocket stabilization with unmatched disturbances[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2012: 1-14. |
| 12 |
HU C F , GAO Z F , REN Y L , et al. A robust adaptive nonlinear fault-tolerant controller via norm estimation for reusable launch vehicles[J]. Acta Astronautica, 2016, 128, 685- 695.
doi: 10.1016/j.actaastro.2016.08.020 |
| 13 |
WANG Z , WU Z , DU Y J . Robust adaptive backstepping control for reentry reusable launch vehicles[J]. Acta Astronautica, 2016, 126, 258- 264.
doi: 10.1016/j.actaastro.2016.04.015 |
| 14 |
TIAN B L , LU H C , ZUO Z Y , et al. Multivariable uniform finite-time output feedback reentry attitude control for RLV with mismatched disturbance[J]. Journal of the Franklin Institute, 2018, 355 (8): 3470- 3487.
doi: 10.1016/j.jfranklin.2018.01.042 |
| 15 | LI K, ZONG Q, ZHANG R L, et al. Real-time simulation platform verification for RLV attitude control[C]//Proc. of the IEEE 39th Chinese Control Conference, 2020: 6768-6773. |
| 16 |
SHENG Y Z , GENG J , LIU X D , et al. Nonsingular finite-time second order sliding mode attitude control for reentry vehicle[J]. International Journal of Control, Automation and Systems, 2015, 13 (4): 853- 866.
doi: 10.1007/s12555-013-0181-y |
| 17 |
MU R J , CHEN J Y , PENG K K , et al. Finite-time super-twisting controller based on SESO design for RLV re-entry phase[J]. IEEE Access, 2019, 7, 37371- 37380.
doi: 10.1109/ACCESS.2019.2905371 |
| 18 |
BHAT S P , BERNSTEIN D S . Continuous finite-time stabilization of the translational and rotational double integrators[J]. IEEE Trans.on Automatic Control, 1998, 43 (5): 678- 682.
doi: 10.1109/9.668834 |
| 19 | 崔乃刚, 吴荣, 韦常柱, 等. 火箭垂直返回双幂次固定时间收敛滑模控制方法[J]. 哈尔滨工业大学学报, 2020, 52 (4): 15- 24. |
| CUI N G , WU R , WEI C Z , et al. Rocket vertical return double-power fixed-time convergence sliding mode control method[J]. Journal of Harbin Institute of Technology, 2020, 52 (4): 15- 24. | |
| 20 |
ZHANG L , WEI C Z , WU R , et al. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle[J]. Aerospace Science and Technology, 2018, 82-83, 70- 79.
doi: 10.1016/j.ast.2018.08.028 |
| 21 | 梁小辉, 胡昌华, 周志杰, 等. 基于自适应动态规划的运载火箭智能姿态容错控制[J]. 航空学报, 2021, 42 (4): 511- 524. |
| LIANG X H , HU C H , ZHOU Z J , et al. Intelligent attitude fault tolerant control of launch vehicle based on adaptive dynamic programming[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (4): 511- 524. | |
| 22 |
LIANG X H , WANG Q , HU C H , et al. Fixed-time observer based fault tolerant attitude control for reusable launch vehicle with actuator faults[J]. Aerospace Science and Technology, 2020, 107, 106314.
doi: 10.1016/j.ast.2020.106314 |
| 23 |
ZHANG L , WEI C Z , WU R , et al. Adaptive fault-tolerant control for a VTVL reusable launch vehicle[J]. Acta Astronautica, 2019, 159, 362- 370.
doi: 10.1016/j.actaastro.2019.03.078 |
| 24 |
LEVANT A . High order sliding modes, differentiation and output feedback control[J]. International Journal of Control, 2003, 76 (9): 924- 941.
doi: 10.1080/0020717031000099029 |
| 25 |
DERAFA L , BENALLEGUE A , FRIDMAN L . Super twisting control algorithm for the attitude tracking of a four rotors UAV[J]. Journal of the Franklin Institute, 2012, 349 (2): 685- 699.
doi: 10.1016/j.jfranklin.2011.10.011 |
| 26 |
LI Z Y , WU S Y , TIAN B L , et al. Event-triggered-based adaptive super-twisting attitude tracking for RLV in reentry phase[J]. Journal of the Franklin Institute, 2020, 357 (18): 13430- 13448.
doi: 10.1016/j.jfranklin.2020.09.041 |
| 27 | ZHANG Y , TANG S J , GUO J . Adaptive-gain fast super-twisting sliding mode fault tolerant control for a reusable launch vehicle in reentry phase[J]. ISA Transactions, 2017, 71 (2): 380- 390. |
| 28 |
DONG Q , ZONG Q , TIAN B , et al. Adaptive-gain multivariable super-twisting sliding mode control for reentry RLV with torque perturbation[J]. International Journal of Robust and Nonlinear Control, 2017, 27 (4): 620- 638.
doi: 10.1002/rnc.3589 |
| 29 |
CHEN A J , SUN M J , WANG Z H , et al. Attitude trajectory tracking of quadrotor UAV using super-twisting observer-based adaptive controller[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2021, 235 (10): 1146- 1157.
doi: 10.1177/0954410020966476 |
| 30 | 李晓栋, 廖宇新, 廖俊, 等. 可重复使用运载火箭一子级垂直回收有限时间滑模控制[J]. 中南大学学报(自然科学版), 2020, 51 (4): 979- 988. |
| LI X D , LIAO Y X , LIAO J , et al. Limited time sliding mode control for one-stage vertical recovery of reusable launch vehicle[J]. Journal of Central South University (Natural Science Edition), 2020, 51 (4): 979- 988. | |
| 31 |
TRAN X T , OH H . A modified generic second order algorithm with fixed-time stability[J]. ISA Transactions, 2020, 109 (9): 72- 80.
doi: 10.1016/j.isatra.2020.10.021 |
| 32 | 刘洋, 井元伟, 刘晓平, 等. 非线性系统有限时间控制研究综述[J]. 控制理论与应用, 2020, 37 (1): 1- 12. |
| LIU Y , JING Y W , LIU X P , et al. Summary of research on finite time control of nonlinear system[J]. Control Theory & Applications, 2020, 37 (1): 1- 12. | |
| 33 |
BHAT S P , BERNSTEIN D S . Geometric homogeneity with applications to finite-time stability[J]. Mathematics of Control Signals and Systems, 2005, 17 (2): 101- 127.
doi: 10.1007/s00498-005-0151-x |
| [1] | 都延丽, 刘武, 唐明明, 王玉惠. 可重复使用运载器多约束鲁棒预测校正制导[J]. 系统工程与电子技术, 2021, 43(5): 1316-1325. |
| [2] | 傅江良, 甘庆波, 张扬, 赵柯昕, 袁洪. 基于NTSM的航天器特征点凝视跟踪控制[J]. 系统工程与电子技术, 2019, 41(7): 1623-1632. |
| [3] | 孙国鑫, 夏群利, 张道驰, 徐文博. 可重复使用运载器自动着陆分段制导策略[J]. 系统工程与电子技术, 2019, 41(4): 856-862. |
| [4] | 段美君, 周荻. 考虑发动机推力受限和动特性的有限时间收敛制导律[J]. 系统工程与电子技术, 2017, 39(9): 2068-2074. |
| [5] | 王晓芳, 郑艺裕, 林海. 导弹协同作战四维制导与控制一体化设计方法[J]. 系统工程与电子技术, 2015, 37(4): 874-881. |
| [6] | 李伟明, 孙瑞胜, 白宏阳, 刘鹏云. 变后掠翼航弹最优弹道自适应滑模跟踪控制[J]. 系统工程与电子技术, 2015, 37(2): 372-378. |
| [7] | 李伟明, 白宏阳, 辛明瑞, 申景诗. 时敏制导炸弹离散自适应滑模BTT自动驾驶仪设计[J]. 系统工程与电子技术, 2015, 37(11): 2579-2585. |
| [8] | 方洁, 邓玮, 姜长生, 文杰. 具有扇区非线性输入的混沌系统函数投影同步[J]. Journal of Systems Engineering and Electronics, 2012, 34(9): 1872-1877. |
| [9] | 贺成龙,陈欣,杨一栋. 一种动态逆解算的RLV混合规划控制分配研究[J]. Journal of Systems Engineering and Electronics, 2010, 32(9): 1973-1976. |
| [10] | 张军, 黄一敏, 杨一栋. RLV末端能量管理段三维制导轨迹推演研究[J]. Journal of Systems Engineering and Electronics, 2010, 32(8): 1727-1731. |
| [11] | 贺成龙,陈欣, 杨一栋. 可重复使用运载器的上升段轨迹线设计[J]. Journal of Systems Engineering and Electronics, 2010, 32(5): 1034-1037. |
| [12] | 李胜, 王轶卿, 陈庆伟, 胡维礼. 一类非完整系统的有限时间镇定控制[J]. Journal of Systems Engineering and Electronics, 2010, 32(2): 359-361. |
| [13] | 吴了泥, 黄一敏, 杨一栋. RLV亚轨道再入段制导技术[J]. Journal of Systems Engineering and Electronics, 2009, 31(12): 2942-2945. |
| [14] | 李清东, 陈璐璐, 张孝功, 任章. FADS快速智能故障检测和诊断技术[J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2544-2546. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||