
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (1): 312-330.doi: 10.12305/j.issn.1001-506X.2026.01.28
李文魁1, 张雅雯1,*, 徐务农2, 杨裕浩1, 金培森1, 单晨阳1
收稿日期:2025-01-10
出版日期:2026-01-25
发布日期:2026-02-11
通讯作者:
张雅雯
作者简介:李文魁(1973—),男,教授,博士,主要研究方向为舰船综合导航与操纵控制基金资助:Wenkui LI1, Yawen ZHANG1,*, Wunong XU2, Yuhao YANG1, Peisen JIN1, Chenyang SHAN1
Received:2025-01-10
Online:2026-01-25
Published:2026-02-11
Contact:
Yawen ZHANG
摘要:
海洋无人航行器异构编队是未来海战场中关键的协同作战方式。本文综述了海洋无人航行器(unmanned marine vehicle,UMV)异构编队的概念、分类及其技术发展现状,从控制架构、控制理论和通信等方面剖析了UMV异构编队控制关键技术的研究进展和面临的主要挑战,并从基于数据驱动的智能控制、面向通信约束的组合通信与控制、构建互操作架构和智能容错控制等四方面展望了未来发展方向。
中图分类号:
李文魁, 张雅雯, 徐务农, 杨裕浩, 金培森, 单晨阳. 海洋无人航行器异构编队控制技术:现状、挑战与展望[J]. 系统工程与电子技术, 2026, 48(1): 312-330.
Wenkui LI, Yawen ZHANG, Wunong XU, Yuhao YANG, Peisen JIN, Chenyang SHAN. Heterogeneous formation control technology for unmanned marine vehicles: current status, challenges and perspectives[J]. Systems Engineering and Electronics, 2026, 48(1): 312-330.

图1
UMV的异构编队分类"
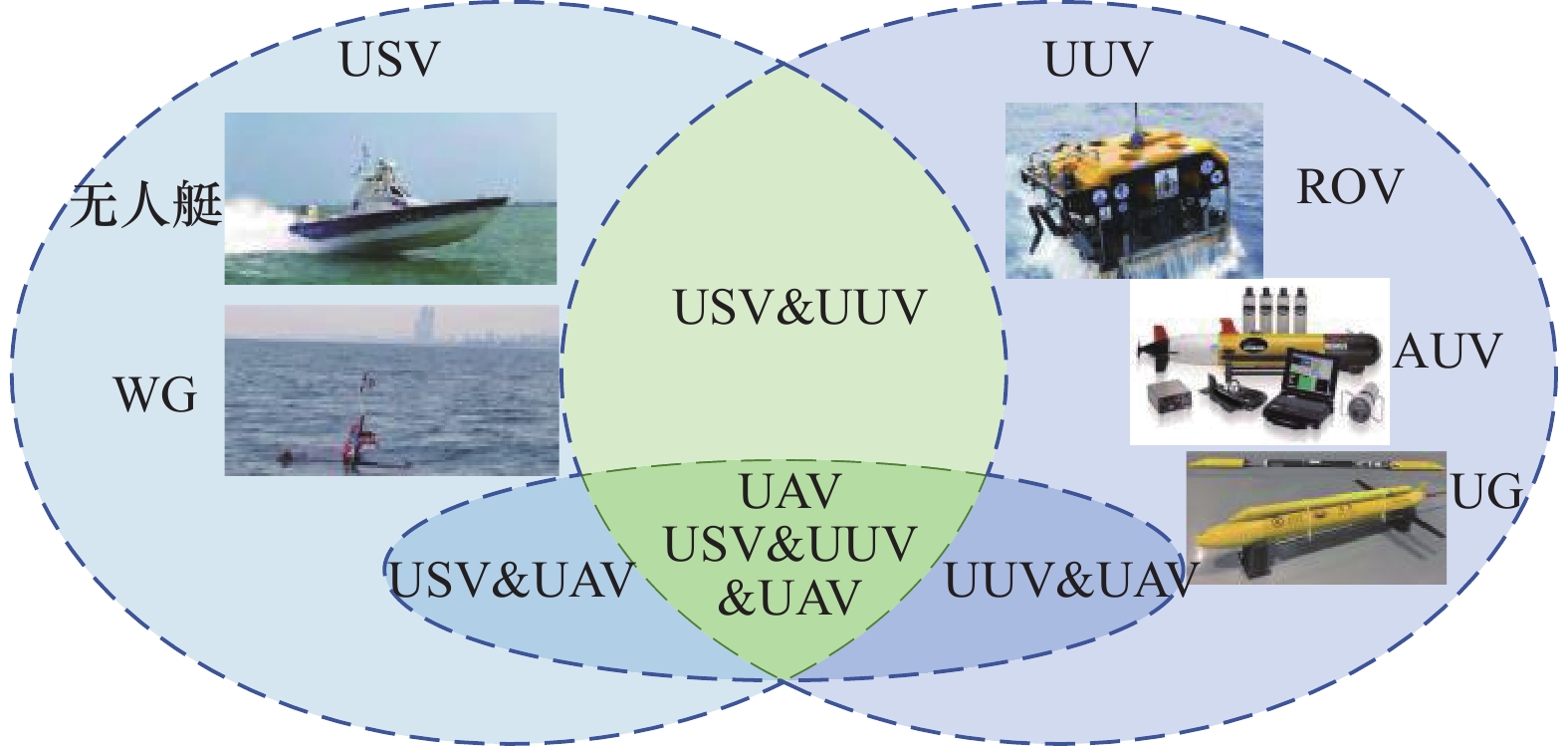

图2
整体架构框图"
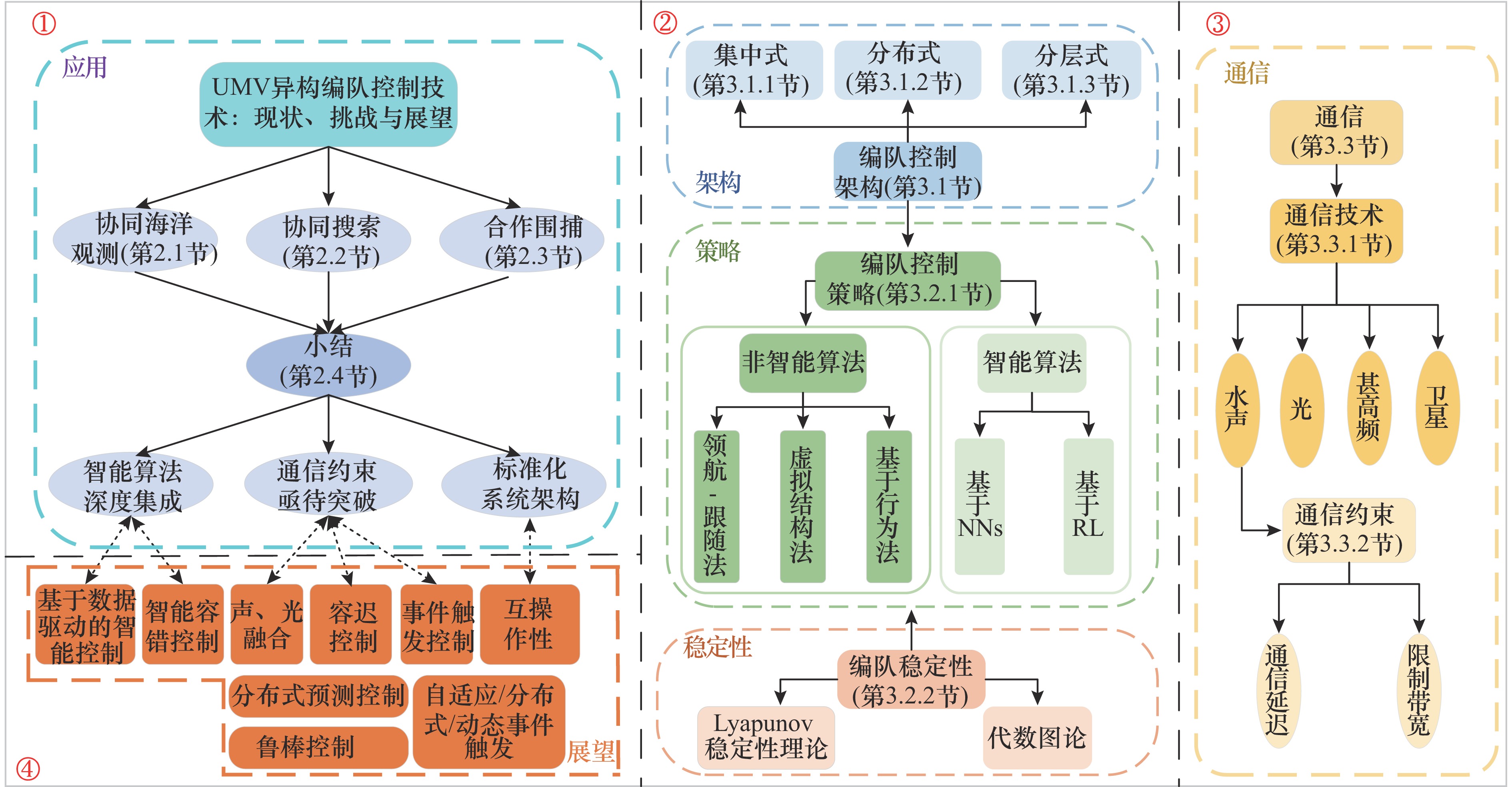
表1
国外海洋观测研究项目案例"
| 项目名称 | 机构 | 开展时间 | 平台类型 | 项目成果 |
| AOSN | 美国海军研究院 | 1990—2005 | REMUS、Slocum、Spray | 观测近海和沿海区域内各种重要海洋特征和现象[ |
| AOSN-II | 美国海军研究院 | 1990—2005 | REMUS、Slocum、Spray | 大范围、长航时异构自主海洋调查[ |
| ASAP | 美国海军研究院 | 2006 | Slocum、Spray | 利用多台UG进行高效的海洋参数采样 |
| GO-SHIP | 美国国家海洋和大气管理局 | 2007— | Slocum、Spray、Seaglider、AUV | 实施定期重复的高分辨率海洋观测,以提供持续、 基准级高质量的海洋数据 |
| OOI | 美国国家科学基金会 | 2013— | Slocum、REMUS-600 | 建立了全球最大海洋观测网络 |
| Ocean of Energy | 荷兰海洋能源研究所 | 2020— | Slocum、Seaglider | 实现海洋环境监测和能量采集开发 |
表2
国外协同搜索研究项目案例"
| 项目名称 | 机构 | 开展时间 | 平台类型 | 项目成果 |
| CADRE | Bluefin公司 | 2006 | AUV、USV | 验证并实现美海军UUV总规划中提出的水下搜索与调查、辅助通信/导航能力[ |
| Unmanned Warrior | 英国海军 | 2016 | UAV、USV、UUV | 完成了编队区域搜索、战场情报收集等任务[ |
| OCEAN 2020 | 欧盟 | 2018 | UAV、USV、UUV | 优化编队协同搜索与区域覆盖,提升了监视、探测与态势感知综合能力[ |
表3
IBP项目阶段性演变"
| 平台类型 | 项目名称 | 开展时间 | 项目成果 |
| Sea Hunter、Sea Hawk、MANTAS T-38 Devil Ray、 MQ-9 Sea Guardian、RQ-20 PUMA、LRUSVs、 LDUUV、ALTIUS、Spyglass、T-12 Mantas、 Switchlade 600、Gutlass | IBP21 | 2021.4 | 初步实现空-海-潜无人系统集成和跨域指挥控制架构[ |
| IBP23.1 | 2023.5 | 验证无人平台联合火力打击能力[ | |
| IBP23.2 | 2023.8 | 验证USV在长航时任务中的自主性和盟友海军的互操作性[ | |
| IBP24.1 | 2024.3 | 实战化测试反馈技术缺陷,加快无人系统实战化部署和战斗力升级[ |

图3
编队控制体系架构"
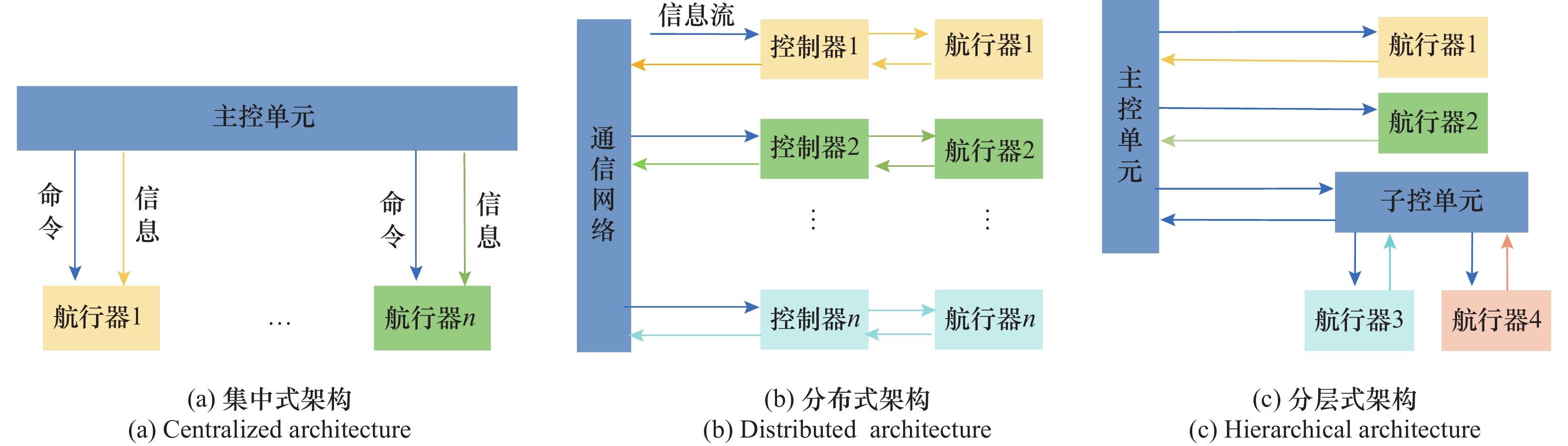
表4
编队控制架构性能对比"
| 类别 | 协调性 | 自主性 | 反应性 | 容错性 | 通信负载 |
| 集中式 | √ | × | × | × | × |
| 分布式 | × | √ | √ | √ | × |
| 分层式 | √ | √ | √ | √ | √ |
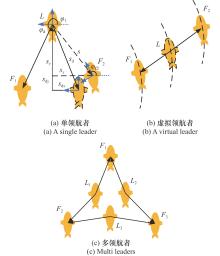
图4
领航-跟随法"
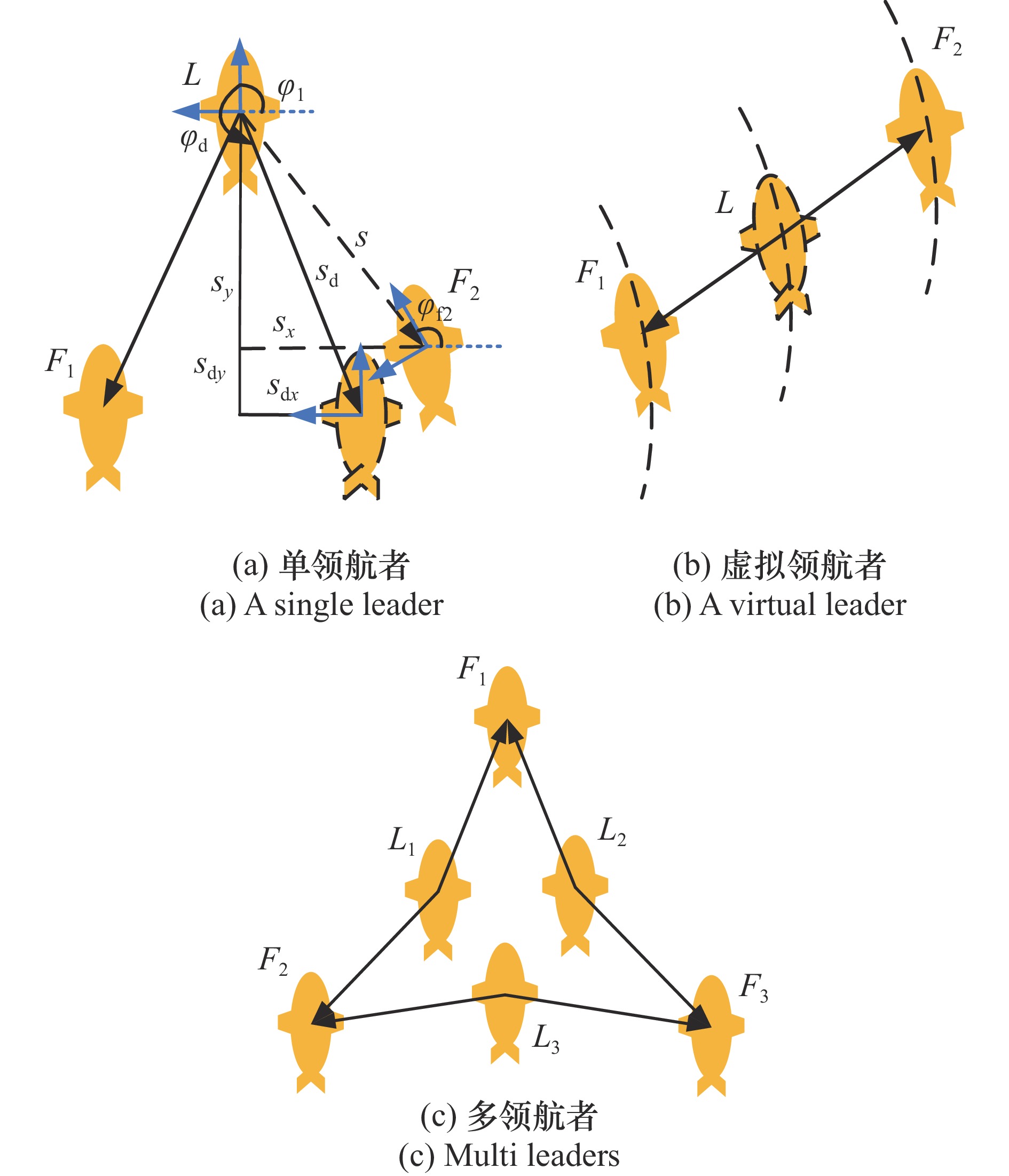

图5
虚拟结构法"
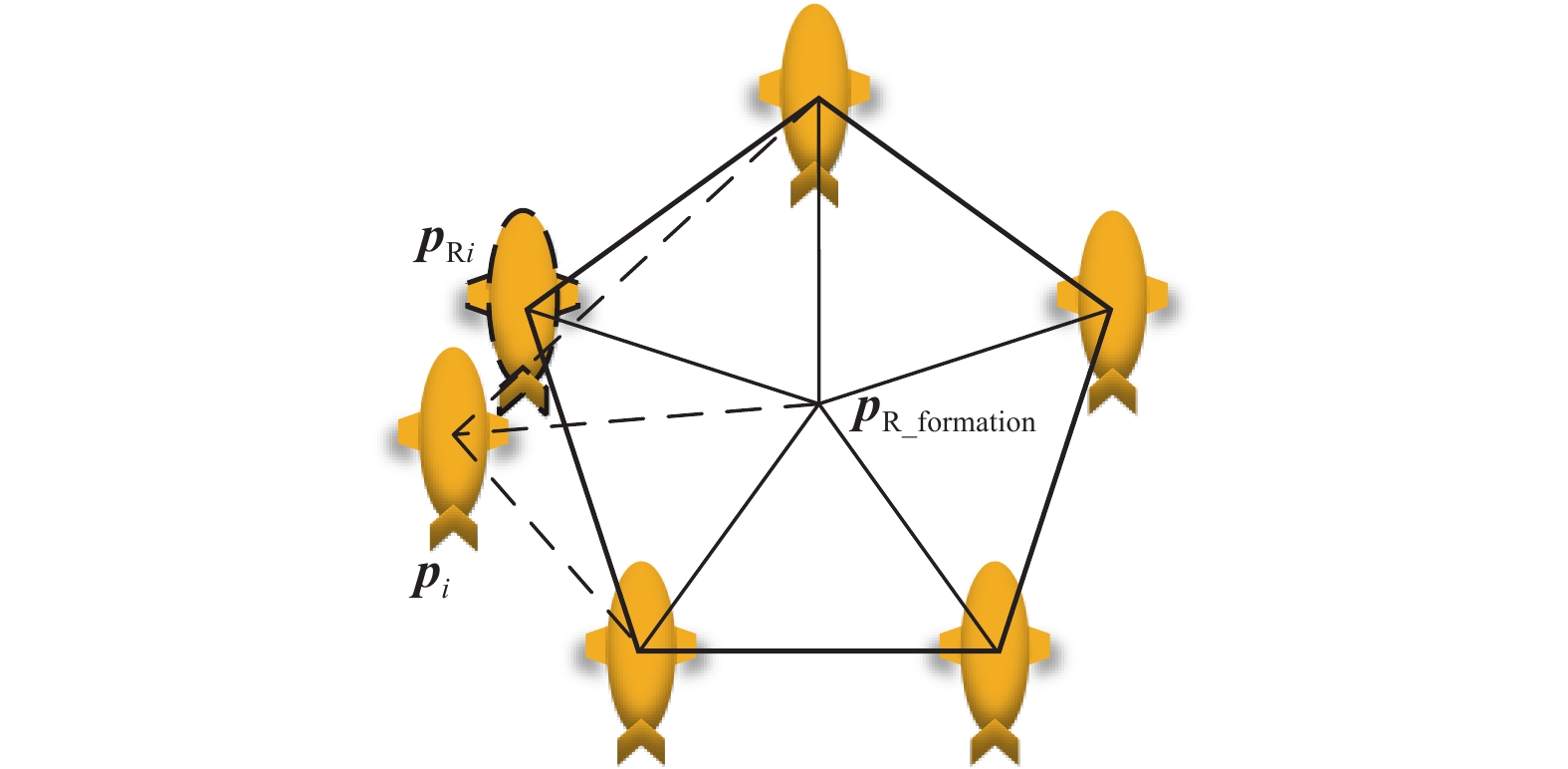
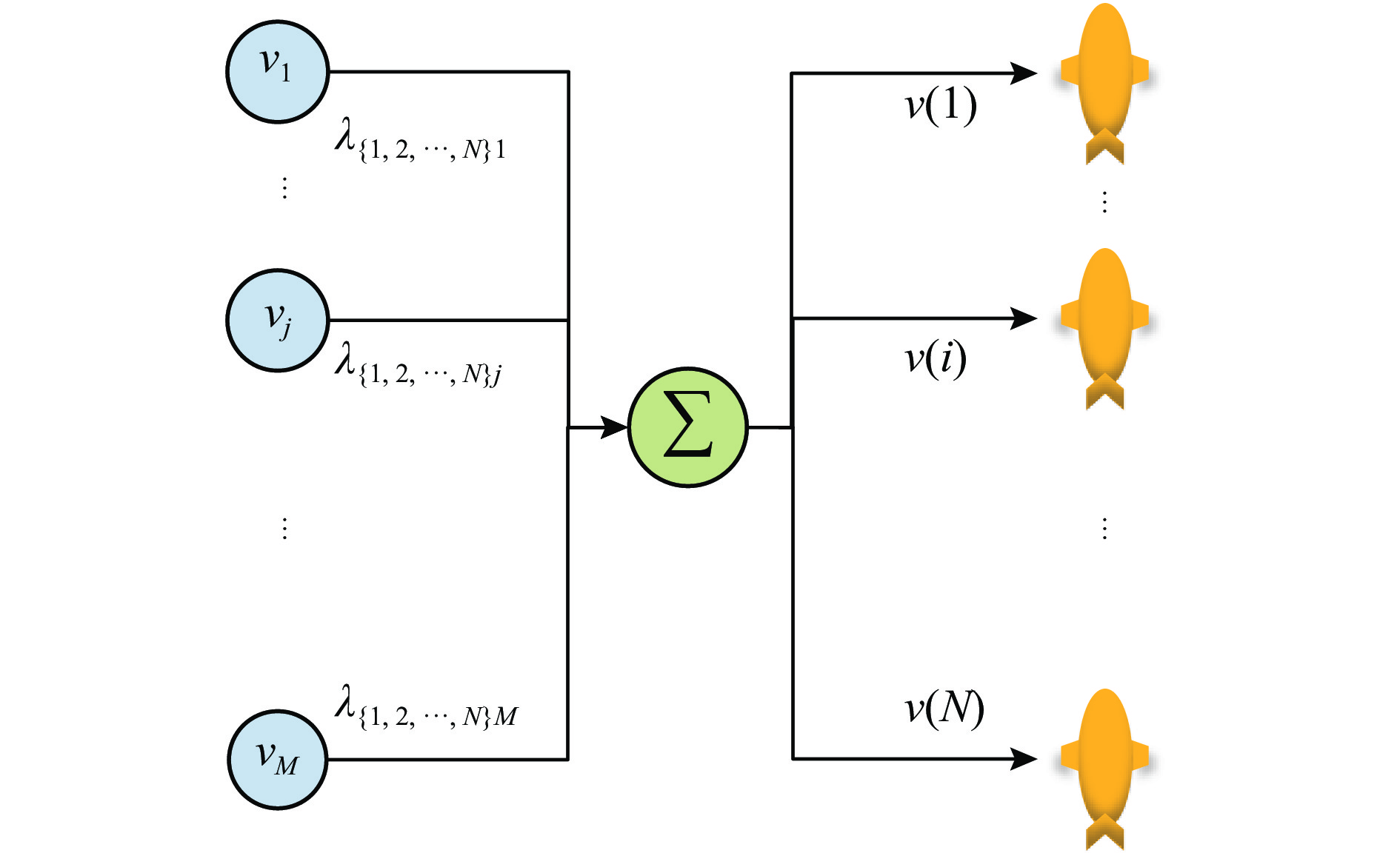
图6
基于行为法"
表5
编队控制策略性能比较"
| 策略名称 | 优势 | 局限性 | 研究文献 |
| 领航-跟随法 | 简单,可扩展性 | 灵活性差,领航者依赖 | 文献[ |
| 虚拟结构法 | 整体性强,队形保持与反馈 | 通信依赖,适应性有限 | 文献[ |
| 基于行为法 | 去中心化,适应性强 | 协调难度大,稳定性差 | 文献[ |
| 基于NNs | 逼近能力强,鲁棒性好 | 训练复杂,参数调节困难 | 文献[ |
| 基于RL | 自学习能力强,计算力强 | 奖励函数设计困难,稳定性差 | 文献[ |
表6
编队通信方式性能对比"
| 类型 | 典型应用装备 | 通信速率 | 优缺点 | 适用场景 |
| 水声通信 | UUV | 1~100 Kbps | 通信距离远;带宽窄、传输速率慢、时延大、信道不稳定 | 深水、远距离通信 |
| 激光通信 | UUV | 10~20 Mbps(水下100 m) | 通信容量大、链路延迟低;传播距离有限、方向性极强 | 近距离、高速通信 |
| VHF通信 | USV | <1 Mbps | 通信容量大、速率高;带宽较低、易受气候和各种干扰影响 | 近距离通信 |
| 卫星通信 | USV | <500 Kbps(L/S频段) | 通信距离远、容量大、稳定性好;传输时延大、有回声效应和通信盲区 | 跨海域通信 |
| 87 | ZHENG H B. Research and implementation of aquatic-aerial trans-domain cooperative formation for unmanned surface vessels and unmanned aerial vehicles[D]. Wuhan: Huazhong University of Science and Technology, 2022. |
| 88 | 王广旭, 蔡伟, 李永琪, 等. 含不确定动态观测的异构无人舰艇系统固定时间编队控制[J]. 电光与控制, 2024, 32 (5): 103- 110. |
| WANG G X, CAI W, LI Y Q, et al. Fixed-time formation control for heterogeneous unmanned surface vehicles with uncertain dynamic observations[J]. Electronics Optics and Control, 2024, 32 (5): 103- 110. | |
| 89 |
白嘉琪, 王彦恺, 邢昊. 无人艇与四旋翼无人机固定时间异构编队控制[J]. 系统工程与电子技术, 2023, 45 (4): 1152- 1163.
doi: 10.12305/j.issn.1001-506X.2023.04.24 |
|
BAI J Q, WANG Y K, XING H. Fixed time heterogeneous formation control of unmannedboats and quadrotor unmanned aerial vehicle[J]. Systems Engineering and Electronics, 2023, 45 (4): 1152- 1163.
doi: 10.12305/j.issn.1001-506X.2023.04.24 |
|
| 90 | DONG X W, WANG Q, YU J L, et al. Neuroadaptive output formation tracking for heterogeneous nonlinear multiagent systems with multiple nonidentical leaders[J]. IEEE Trans. on Neural Networks and Learning Systems, 2022, 35 (3): 3702- 3712. |
| 91 |
李娟, 袁锐锟, 张宏瀚. 基于领航跟随法的多AUV编队控制算法研究[J]. 仪器仪表学报, 2022, 40 (6): 237- 246.
doi: 10.19650/j.cnki.cjsi.J1904889 |
|
LI J, YUAN R K, ZHANG H H. Research on multiple AUVs formation control algorithm based on leader follower method[J]. Chinese Journal of Seientifie Instrument, 2022, 40 (6): 237- 246.
doi: 10.19650/j.cnki.cjsi.J1904889 |
|
| 92 |
OGREN P, FIORELLI E, LEONARD N E. Cooperative control of mobile sensor networks: adaptive gradient climbing in a distributed environment[J]. IEEE Trans. on Automatic Control, 2004, 49 (8): 1292- 1302.
doi: 10.1109/TAC.2004.832203 |
| 93 |
YAO X Y, DING H F, GE M F. Formation-containment control for multi-robot systems with two-layer leaders via hierarchical controller–estimator algorithms[J]. Journal of the Franklin Institute, 2018, 355 (12): 5272- 5290.
doi: 10.1016/j.jfranklin.2018.05.010 |
| 94 | PETERSON C K, BARTON J. Virtual structure formations of cooperating UAVs using wind-compensation command generation and generalized velocity obstacles[C]// Proc. of the IEEE Aerospace Conference, 2015. |
| 95 | 郑海滨, 龙铭康, 苏厚胜, 等. 虚拟结构与人工势场相结合的机艇协同编队[C]// 第40届中国控制会议, 2021: 8897−8902. |
| ZHENG H B, LONG M K, SU H S, et al. Synergy formation of UAV and USV combining virtual structure and artificial potential field[C]// Proc. of the 40th Chinese Control Conference, 2021: 8897−8902. | |
| 96 |
胡建章, 唐国元, 王建军, 等. 基于自适应反步滑模的水面无人艇集群控制[J]. 中国舰船研究, 2019, 14 (6): 1- 7.
doi: 10.19693/j.issn.1673-3185.01521 |
|
HU J G, TANG G Y, WANG J J, et al. Swarm control of USVs based on adaptive backstepping combined with sliding mode[J]. Chinese Journal of Ship Research, 2019, 14 (6): 1- 7.
doi: 10.19693/j.issn.1673-3185.01521 |
|
| 97 |
王宁, 刘永金, 高颖. 未知扰动下的无人艇编队优化轨迹跟踪控制[J]. 中国舰船研究, 2024, 19 (1): 178- 190.
doi: 10.19693/j.issn.1673-3185.03348 |
|
WANG N, LIU Y J, GAO Y. Optimal trajectory tracking control of unmanned surface vehicle formation under unknown disturbances[J]. Chinese Journal of Ship Research, 2024, 19 (1): 178- 190.
doi: 10.19693/j.issn.1673-3185.03348 |
|
| 98 |
LIU G, WEN N, LONG F, et al. A formation control and obstacle avoidance method for multiple unmanned surface vehicles[J]. Journal of Marine Science and Engineering, 2023, 11 (12): 2346.
doi: 10.3390/jmse11122346 |
| 99 | LAWTON J R T. A behavior-based approach to multiple spacecraft formation flying[M]. Provo, Utah: Brigham Young University, 2000. |
| 100 | CAO Z Q, TAN M, WANG S, et al. The optimization research of formation control for multiple mobile robots[C]// Proc. of the 4th World Congress on Intelligent Control and Automation, 2002: 1270−1274. |
| 101 | MONTEIRO S, BICHO E. A dynamical systems approach to behavior-based formation control[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2002: 2606−2611. |
| 102 | JIA Q L, LI G W. Formation control and obstacle avoidance algorithm of multiple autonomous underwater vehicles (AUVs) based on potential function and behavior rules[C]// Proc. of the IEEE International Conference on Automation and Logistics, 2007: 569−573. |
| 103 |
ANTONELLI G, ARRICHIELLO F, CHIAVERINI S. Experiments of formation control with multirobot systems using the null-space-based behavioral control[J]. IEEE Trans. on Control Systems Technology, 2009, 17 (5): 1173- 1182.
doi: 10.1109/TCST.2008.2004447 |
| 104 |
ARRICHIELLO F, CHIAVERINI S, INDIVERI G, et al. The null-space-based behavioral control for mobile robots with velocity actuator saturations[J]. The International Journal of Robotics Research, 2010, 29 (10): 1317- 1337.
doi: 10.1177/0278364909358788 |
| 1 | PENG Z H, WANG J, WANG D, et al. An overview of recent advances in coordinated control of multiple autonomous surface vehicles[J]. IEEE Trans. on Industrial Informatics, 2020, 17 (2): 732- 745. |
| 2 |
金克帆, 王鸿东, 易宏, 等. 海上无人装备关键技术与智能演进展望[J]. 中国舰船研究, 2018, 13 (6): 1- 8.
doi: 10.19693/j.issn.1673-3185.01293 |
|
JIN K F, WANG H D, YI H, et al. Key technologies and intelligence evolution of maritime UV[J]. Chinese Journal of Ship Research, 2018, 13 (6): 1- 8.
doi: 10.19693/j.issn.1673-3185.01293 |
|
| 3 |
徐博, 王朝阳. 基于无人艇跨域异构编队协同导航研究进展与未来趋势[J]. 中国舰船研究, 2022, 17 (4): 1- 11,56.
doi: 10.19693/j.issn.1673-3185.02389 |
|
XU B, WANG Z Y. Cooperative navigation of cross-domain heterogeneous unmanned ship formation: recent advances and future trends[J]. Chinese Journal of Ship Research, 2022, 17 (4): 1- 11,56.
doi: 10.19693/j.issn.1673-3185.02389 |
|
| 4 | 车高峰. 自主式水下航行器路径规划及轨迹跟踪控制的研究[D]. 厦门: 厦门大学, 2021. |
| CHE G F. Researches on path planning and trajectory-tracking control for autonomous underwater vehicle[D]. Xiamen: Xiamen University, 2021. | |
| 5 |
胡满江, 王智炜, 杜长坤, 等. 基于动态事件触发策略的多AUV一致控制[J]. 湖南大学学报 (自然科学版), 2022, 49 (8): 1- 11.
doi: 10.16339/j.cnki.hdxbzkb.2022177 |
|
HU M J, WANG Z W, DU C K, et al. Consensus control of multi-AUVs based on a dynamic event-triggered strategy[J]. Journal of Hunan University(Natural Sciences), 2022, 49 (8): 1- 11.
doi: 10.16339/j.cnki.hdxbzkb.2022177 |
|
| 6 | 梁霄. 无人水下航行器集群控制[M]. 北京: 科学出版社, 2023. |
| LIANG X. Cluster control of unmanned underwater vehicles[M]. Beijing: Press of Science, 2023. | |
| 7 |
OLFATI-SABER R. Flocking for multi-agent dynamic systems: algorithms and theory[J]. IEEE Trans. on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 105 |
TAN G G, ZHUANG J Y, ZOU J, et al. Coordination control for multiple unmanned surface vehicles using hybrid behavior-based method[J]. Ocean Engineering, 2021, 232, 109147.
doi: 10.1016/j.oceaneng.2021.109147 |
| 106 |
FAN J J, LIAO Y L, LI Y, et al. Formation control of multiple unmanned surface vehicles using the adaptive null-space-based behavioral method[J]. IEEE Access, 2019, 7, 87647- 87657.
doi: 10.1109/ACCESS.2019.2925466 |
| 107 | PENG Z, WANG D, CHEN Z Y, et al. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics[J]. IEEE Trans. on Control Systems Technology, 2012, 21 (2): 513- 520. |
| 108 | WU H, SONG S J, YOU K Y, et al. Depth control of model-free AUVs via reinforcement learning[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 49 (12): 2499- 2510. |
| 109 | WANG H Q, SHI P, LI H Y, et al. Adaptive neural tracking control for a class of nonlinear systems with dynamic uncertainties[J]. IEEE Trans. on Cybernetics, 2016, 47 (10): 3075- 3087. |
| 110 |
ZHANG X Y, HAN T, XIAO B, et al. Neural network-based predefined-time bipartite formation tracking control of uncertain heterogeneous Euler-Lagrange systems in task space[J]. ISA Transactions, 2024, 148, 358- 366.
doi: 10.1016/j.isatra.2024.03.013 |
| 111 | GUO X X, CUI R X, YAN W S. Pursuit-evasion games of marine surface vessels using neural network-based control[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2024, 55 (1): 18- 27. |
| 112 | YUAN C Z, LICHT S, HE H B. Formation learning control of multiple autonomous underwater vehicles with heterogeneous nonlinear uncertain dynamics[J]. IEEE Trans. on Cybernetics, 2017, 48 (10): 2920- 2934. |
| 113 |
PENG Z H, WANG D, LI T S, et al. Leaderless and leader-follower cooperative control of multiple marine surface vehicles with unknown dynamics[J]. Nonlinear Dynamics, 2013, 74 (1/2): 95- 106.
doi: 10.1007/s11071-013-0951-3 |
| 114 | LIU X M, GE S S, GOH C H. Neural-network-based switching formation tracking control of multiagents with uncertainties in constrained space[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 49 (5): 1006- 1015. |
| 115 | CHEN L P, CUI R X, YANG C G, et al. Adaptive neural network control of underactuated surface vessels with guaranteed transient performance: theory and experimental results[J]. IEEE Trans. on Industrial Electronics, 2019, 67 (5): 4024- 4035. |
| 116 |
LIU H T, WENG P J, TIAN X H, et al. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems[J]. Ocean Engineering, 2023, 267, 113240.
doi: 10.1016/j.oceaneng.2022.113240 |
| 8 |
陈盼, 胡剑光, 尹志伟. UUV 编队协同搜索静止目标的准最优方法[J]. 火力与指挥控制, 2013, 38 (4): 53- 56.
doi: 10.3969/j.issn.1002-0640.2013.04.013 |
|
CHEN P, HU J G, YIN Z W. Quasi-optimal method for multiple UUVs cooperate to search static target[J]. Fire Control and Command Control, 2013, 38 (4): 53- 56.
doi: 10.3969/j.issn.1002-0640.2013.04.013 |
|
| 9 | 严浙平. 水下无人航行器控制技术[M]. 北京: 国防工业出版社, 2015. |
| YAN Z P. Control technology for unmanned underwater vehicles[M]. Beijing: Press of National Defence Industry, 2015. | |
| 10 |
曾江峰, 谢杨柳, 金哲毅, 等. 水面无人艇集群编队控制技术综述[J]. 导航定位与授时, 2023, 10 (5): 7- 17.
doi: 10.19306/j.cnki.2095-8110.2023.05.002 |
|
ZENG J F, XIE Y L, JIN Z Y, et al. Review for swarm formation control technology of unmanned surface vehicles[J]. Navigation Positioning and Timing, 2023, 10 (5): 7- 17.
doi: 10.19306/j.cnki.2095-8110.2023.05.002 |
|
| 11 | 邹佳运, 张文清, 曲泓玥, 等. 面向水下目标搜索的USV&UUV编队协同队形规划[J]. 无人系统技术, 2021, 4 (3): 40- 46. |
| ZOU J Y, ZHANG W Q, QU H Y, et al. Cooperative formation planning of UUV&USV formations for underwater target search[J]. Unmanned Systems Technology, 2021, 4 (3): 40- 46. | |
| 12 |
徐小斌, 段海滨, 曾志刚, 等. 无人机/无人艇协同控制研究进展[J]. 航空兵器, 2020, 27 (6): 1- 6.
doi: 10.12132/ISSN.1673-5048.2020.0227 |
|
XU X B, DUAN H B, ZENG Z G, et al. Progresses in UAV/USV cooperative control[J]. Aero Weaponry, 2020, 27 (6): 1- 6.
doi: 10.12132/ISSN.1673-5048.2020.0227 |
|
| 13 |
YOU X, YAN X P, LIU J L, et al. Adaptive neural sliding mode control for heterogeneous ship formation keeping considering uncertain dynamics and disturbances[J]. Ocean Engineering, 2022, 263, 112268.
doi: 10.1016/j.oceaneng.2022.112268 |
| 14 |
孙海文, 王溪野, 王兆辰, 等. 海上异构无人集群协同运用发展概况及启示[J]. 水下无人系统学报, 2024, 32 (2): 275- 281.
doi: 10.11993/j.issn.2096-3920.2024-0032 |
| 117 | CUI R X, YANG C G, LI Y, et al. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 47 (6): 1019- 1029. |
| 118 | ZHANG K Q, YANG Z R, BAŞAR T. Multi-agent reinforcement learning: a selective overview of theories and algorithms[J]. Handbook of Reinforcement Learning and Control, 2021, 325, 321- 384. |
| 119 |
ZHAO Y J, MA Y, HU S L. USV formation and path-following control via deep reinforcement learning with random braking[J]. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32 (12): 5468- 5478.
doi: 10.1109/TNNLS.2021.3068762 |
| 120 | HE J Y, XI M, WEN J B, et al. Marl-based AUV formation for underwater intelligent autonomous transport systems supported by 6G network[J]. IEEE Trans. on Intelligent Transportation Systems, 2024, 26 (10): 17339- 17348. |
| 121 |
FANG Z, JIANG D, HUANG J, et al. Autonomous underwater vehicle formation control and obstacle avoidance using multi-agent generative adversarial imitation learning[J]. Ocean Engineering, 2022, 262, 112182.
doi: 10.1016/j.oceaneng.2022.112182 |
| 122 |
WANG Z K, ZHANG L J. Distributed optimal formation tracking control based on reinforcement learning for underactuated AUVs with asymmetric constraints[J]. Ocean Engineering, 2023, 280, 114491.
doi: 10.1016/j.oceaneng.2023.114491 |
| 123 |
WANG Z, ZHANG L, ZHU Z. Game-based distributed optimal formation tracking control of underactuated AUVs based on reinforcement learning[J]. Ocean Engineering, 2023, 287, 115879.
doi: 10.1016/j.oceaneng.2023.115879 |
| 124 |
LIU Z W, HOU H Z, WANG Y W. Formation-containment control of multiple underactuated surface vessels with sampling communication via hierarchical sliding mode approach[J]. ISA Transactions, 2022, 124, 458- 467.
doi: 10.1016/j.isatra.2019.12.003 |
| 125 | OGREN P, EGERSTEDT M, HU X. A control Lyapunov function approach to multi-agent coordination[C]// Proc. of the 40th IEEE Conference on Decision and Control, 2001: 1150−1155. |
| 126 | WANG H Q, DONG J X. Neural network-based hierarchical fault-tolerant affine formation control for heterogeneous nonlinear multi-agent systems[J]. IEEE Trans. on Intelligent Transportation Systems, 2023, 25 (5): 4503- 4511. |
| 127 |
SEPULCHRE R, PALEY D A, LEONARD N E. Stabilization of planar collective motion: all-to-all communication[J]. IEEE Trans. on Automatic Control, 2007, 52 (5): 811- 824.
doi: 10.1109/TAC.2007.898077 |
| 128 | GODSIL C, ROYLE G F. Algebraic graph theory[M]. Berlin: Springer Science and Business Media, 2001. |
| 14 |
SUN H W, WANG X Y, WANG Z C, et al. Development overview and inspiration of collaborative application of heterogeneous unmanned cluster’s at sea[J]. Journal of Unmanned Undersea Systems, 2024, 32 (2): 275- 281.
doi: 10.11993/j.issn.2096-3920.2024-0032 |
| 15 | YOON S, DO H, KIM J. Collaborative mission and route planning of multi-vehicle systems for autonomous search in marine environment[J]. International Journal of Control, Automation and Systems, 2020, 18 (3): 546- 555. |
| 16 |
TIAN Y P, LIU C L. Consensus of multi-agent systems with diverse input and communication delays[J]. IEEE Trans. on Automatic Control, 2008, 53 (9): 2122- 2128.
doi: 10.1109/TAC.2008.930184 |
| 17 |
DONG S Q, LIU M Q, DONG S L, et al. Hierarchical heterogeneous multi-agent cross-domain search method based on deep reinforcement learning[J]. IEEE Trans. on Intelligent Transportation Systems, 2024, 25 (11): 18872- 18883.
doi: 10.1109/TITS.2024.3417698 |
| 18 | WEI W, WANG J J, FANG Z R, et al. 3U: joint design of UAV-USV-UUV networks for cooperative target hunting[J]. IEEE Trans. on Vehicular Technology, 2022, 72 (3): 4085- 4090. |
| 19 |
ZHANG G Q, CAO Q, HUANG C F, et al. Adaptive neural quantized formation control for heterogeneous underactuated ships with the MVs guidance[J]. Ocean Engineering, 2024, 294, 116760.
doi: 10.1016/j.oceaneng.2024.116760 |
| 20 |
LI S F, ZHANG F M, WANG S X, et al. Constructing the three-dimensional structure of an anticyclonic eddy with the optimal configuration of an underwater glider network[J]. Applied Ocean Research, 2020, 95, 101893.
doi: 10.1016/j.apor.2019.101893 |
| 21 |
王广旭, 蔡伟, 李永琪, 等. 含不确定动态观测的异构无人舰艇系统固定时间编队控制[J]. 电光与控制, 2025, 32 (5): 103- 110.
doi: 10.3969/j.issn.1671-637X.2025.05.0017 |
|
WANG G X, CAI W, LI Y Q, et al. Fixed-time formation control for heterogeneous unmanned surface vehicles with uncertain dynamic observations[J]. Electronics Optics & Control, 2025, 32 (5): 103- 110.
doi: 10.3969/j.issn.1671-637X.2025.05.0017 |
|
| 22 | 周安琪. 多UUV/USV路径规划及协同编队控制[D]. 南京: 南京理工大学, 2021. |
| ZHOU A Q. Multiple UUV/USV path planning and formation control[D]. Nanjing: Nanjing University of Science & Technology, 2021. | |
| 23 |
WU Y, LOW K H, LV C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Trans. on Vehicular Technology, 2020, 69 (6): 6782- 6787.
doi: 10.1109/TVT.2020.2991983 |
| 129 | NAJA M, SHAIKHOLESLAM F. Graph theoretical methods to study controllability and leader selection for dead-time systems[J]. Transactions on Combinatorics, 2013, 2 (4): 25- 36. |
| 130 |
FAX J A, MURRAY R M. Information flow and cooperative control of vehicle formations[J]. IEEE Trans. on Automatic Control, 2004, 49 (9): 1465- 1476.
doi: 10.1109/TAC.2004.834433 |
| 131 | LAFFERRIERE G, CAUGHMAN J, WILLIAMS A. Graph theoretic methods in the stability of vehicle formations[C]// Proc. of the American Control Conference, 2004: 3729−3734. |
| 132 |
LIN Z, FRANCIS B, MAGGIORE M. Necessary and sufficient graphical conditions for formation control of unicycles[J]. IEEE Trans. on Automatic Control, 2005, 50 (1): 121- 127.
doi: 10.1109/TAC.2004.841121 |
| 133 |
AYAZ M, AMMAD-UDDIN M, SHARIF Z, et al. A hybrid data collection scheme to achieve load balancing for underwater sensor networks[J]. Journal of King Saud University-Computer and Information Sciences, 2023, 35 (3): 74- 86.
doi: 10.1016/j.jksuci.2023.02.006 |
| 134 |
GUSSEN C M, DINIZ P S, CAMPOS M L, et al. A survey of underwater wireless communication technologies[J]. Communications of the Association for Information Systems, 2016, 31 (1): 242- 255.
doi: 10.14209/jcis.2016.22 |
| 135 | CAMPAGNARO F, FRANCESCON R, CASARI P, et al. Multimodal underwater networks: recent advances and a look ahead[C]// Proc. of the 12th International Conference on Underwater Networks & Systems, 2017. |
| 136 |
王童豪, 彭星光, 胡浩, 等. 海上有人/无人协同系统及其关键技术综述[J]. 兵工学报, 2024, 45 (10): 3317- 3340.
doi: 10.12382/bgxb.2024.0327 |
|
WANG T H, PENG X G, HU H, et al. Maritime manned/unmanned collaborative systems and key technologies: a survey[J]. Acta Armamentarii, 2024, 45 (10): 3317- 3340.
doi: 10.12382/bgxb.2024.0327 |
|
| 137 | HUANG J G, WANG H, HE C B, et al. Underwater acoustic communication and the general performance evaluation criteria[J]. Frontiers of Information Technology & Electronic Engineering, 2018, 19 (8): 951- 971. |
| 138 | ZENG Z Q, FU S, ZHANG H H, et al. A survey of underwater optical wireless communications[J]. IEEE Communications Surveys and Tutorials, 2016, 19 (1): 204- 238. |
| 139 | GABRIEL C, KHALIGHI M A, BOURENNANE S, et al. Monte-Carlo-based channel characterization for underwater optical communication systems[J]. Journal of Optical Communications and Networking, 2012, 5 (1): 1- 12. |
| 24 |
高永琪, 马威强, 张林森, 等. 分布式多AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44 (5): 1670- 1676.
doi: 10.12305/j.issn.1001-506X.2022.05.29 |
|
GAO Y Q, MA W Q, ZHANG L S, et al. Distributed multi-AUVs cooperative search method[J]. Systems Engineering and Electronics, 2022, 44 (5): 1670- 1676.
doi: 10.12305/j.issn.1001-506X.2022.05.29 |
|
| 25 |
张杨, 周作鹏, 田燕妮. 基于分布式概念的水下无人作战系统发展研究[J]. 舰船科学技术, 2023, 45 (21): 119- 124.
doi: 10.3404/j.issn.1672-7649.2023.21.022 |
|
ZHANG Y, ZHOU Z P, TIAN Y N. Development of distributed underwater unmanned combat[J]. Ship Science and Technology, 2023, 45 (21): 119- 124.
doi: 10.3404/j.issn.1672-7649.2023.21.022 |
|
| 26 | SMITH R N, PEREIRA A, CHAO Y, et al. Autonomous underwater vehicle trajectory design coupled with predictive ocean models: a case study[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2010: 4770−4777. |
| 27 |
MA X J, WANG Y H, LI S, et al. Formation control of discrete-time nonlinear multi-glider systems for both leader–follower and no-leader scenarios under switching topology: cases for a fleet consisting of a wave glider and multiple underwater gliders[J]. Ocean Engineering, 2023, 276, 114003.
doi: 10.1016/j.oceaneng.2023.114003 |
| 28 |
毛柳伟, 杜度, 李杨. 水下滑翔机集群应用现状与关键技术展望[J]. 舰船科学技术, 2020, 42 (12): 13- 20.
doi: 10.3404/j.issn.1672-7649.2020.12.003 |
|
MAO L W, DU D, LI Y. Application status and key technology prospect of underwater glider cluster[J]. Ship Science and Technology, 2020, 42 (12): 13- 20.
doi: 10.3404/j.issn.1672-7649.2020.12.003 |
|
| 29 |
CURTIN T B, BELLINGHAM J G, CATIPOVIC J, et al. Autonomous oceanographic sampling networks[J]. Oceanography, 1993, 6 (3): 86- 94.
doi: 10.5670/oceanog.1993.03 |
| 30 |
RAMP S R, DAVIS R E, LEONARD N E, et al. Preparing to predict: the second autonomous ocean sampling network (AOSN-II) experiment in the MONTEREY bay[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 2009, 56 (3/5): 68- 86.
doi: 10.1016/j.dsr2.2008.08.013 |
| 31 |
SHU Y Q, CHEN J, LI S, et al. Field-observation for an anticyclonic mesoscale eddy consisted of twelve gliders and sixty-two expendable probes in the northern south china sea during summer 2017[J]. Science China Earth Sciences, 2019, 62, 451- 458.
doi: 10.1007/s11430-018-9239-0 |
| 140 | WANG Y H, CUI J, ZHAO B D, et al. Observation and communication platform design of USV for marine environmental parameters[C]// Proc. of the Global Oceans 2020: Singapore–US Gulf Coast, 2020. |
| 141 | YAN Z P, XU D, CHEN T, et al. Formation control of unmanned underwater vehicles using local sensing means in absence of follower position information[J]. International Journal of Advanced Robotic Systems, 2021, 18(1): 1729881420986745. |
| 142 | 景锐洁. 异构AUV编队系统分布式控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2023. |
| JING R J. Research on distributed control of heterogeneous AUV formation systems[D]. Harbin: Harbin Engineering University, 2023. | |
| 143 | SURYENDU C, SUBUDHI B. Formation control of multiple autonomous underwater vehicles under communication delays[J]. IEEE Trans. on Circuits and Systems II: Express Briefs, 2020, 67 (12): 3182- 3186. |
| 144 |
SURYENDU C, SUBUDHI B. Modified constrained adaptive formation control scheme for autonomous underwater vehicles under communication delays[J]. IET Cyber-Systems and Robotics, 2020, 2 (1): 22- 30.
doi: 10.1049/iet-csr.2019.0027 |
| 145 |
LI J, DU J L, LEWIS F L. Distributed three-dimension time-varying formation control with prescribed performance for multiple underactuated autonomous underwater vehicles[J]. International Journal of Robust and Nonlinear Control, 2021, 31 (13): 6272- 6287.
doi: 10.1002/rnc.5611 |
| 146 |
LI J, TIAN Z Y, ZHANG H H. Discrete-time AUV formation control with leader-following consensus under time-varying delays[J]. Ocean Engineering, 2023, 286, 115678.
doi: 10.1016/j.oceaneng.2023.115678 |
| 147 | DU J L, LI J, LEWIS F L. Distributed 3-D time-varying formation control of underactuated AUVS with communication delays based on data-driven state predictor[J]. IEEE Trans. on Industrial Informatics, 2022, 19 (5): 6963- 6971. |
| 148 |
YAMCHI M H, ESFANJANI R M. Distributed predictive formation control of networked mobile robots subject to communication delay[J]. Robotics and Autonomous Systems, 2017, 91, 194- 207.
doi: 10.1016/j.robot.2017.01.005 |
| 149 |
GUPTA C, KARN C K, BANYAL R. Delay minimising depth-based routing for multi-sink underwater wireless sensor networks[J]. International Journal of Sensor Networks, 2018, 27 (2): 85- 94.
doi: 10.1504/IJSNET.2018.092627 |
| 150 | JIANG S M. State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: a survey based on a mac reference model[J]. IEEE Communications Surveys and Tutorials, 2017, 20 (1): 96- 131. |
| 32 | QIU C H, MAO H B, LIU H L, et al. Deformation of a warm eddy in the northern south china sea[J]. Journal of Geophysical Research: Oceans, 2019, 124 (8): 5551- 5564. |
| 33 | QIU C H, YANG Z H, WANG D X, et al. The enhancement of submesoscale ageostrophic motion on the mesoscale eddies in the south china sea[J]. Journal of Geophysical Research: Oceans, 2022, 127 (9): e2022JC018736. |
| 34 | 天津大学新闻网. 天大“海燕”水下滑翔机助力世界最大规模中尺度漩涡观测项目[EB/OL]. https://news.tju.edu.cn/info/1012/34113.html. |
| Tianjin University News. Tianjin University’s “Haiyan” underwater glider supports the world’s largest mesoscale eddy observation project[EB/OL]. https://news.tju.edu.cn/info/1012/34113.html. | |
| 35 | 沈阳自动化研究所. 沈阳自动化所举行空海一体化立体协同观测联合试验[EB/OL]. [2025-01-05]. https://www.cas.cn/yx/201806/t201806254655803.shtml. |
| Shenyang Institute of Automation. SIA conducts joint experiment on integrated air-sea stereoscopic cooperative observation[EB/OL]. [2025-01-05]. https://www.cas.cn/yx/201806/t201806254655803.shtml. | |
| 36 | 中国交通建设集团有限公司粤港澳大湾区创新研究院. 海洋观测利器-智能敏捷海洋立体观测系统[EB/OL]. [2025-01-05]. https://www.cccchzmb.com/haiyangguanceliqi-zhinengminjiehaiyanglitiguancexitong/. |
| China Communications Construction Company Guangdong-Hong Kong-Macao Greater Bay Area Innovation Research Institute. A cutting-edge tool for marine observation-intelligent agile ocean stereoscopic observation system[EB/OL]. [2025-01-05]. https://www.ccccltdgb.com/haiyangguanceliqi-zhinengminjiehaiyanglitiguancexitong/. | |
| 37 | 杨绍琼, 李元昊, 孙通帅, 等. “海燕”号谱系化水下滑翔机技术发展与应用[J]. 水下无人系统学报, 2023, 31 (1): 68- 85. |
| YANG S Q, LI Y H, SUN T S, et al. Development and application of petrel serialized underwater glider technologies[J]. Journal of Unmanned Undersea Systems, 2023, 31 (1): 68- 85. | |
| 38 |
YANG Y, WANG S X, WU Z L, et al. Motion planning for multi-hug formation in an environment with obstacles[J]. Ocean Engineering, 2011, 38 (17/18): 2262- 2269.
doi: 10.1016/j.oceaneng.2011.10.008 |
| 39 | XUE D Y, WU Z L, WANG Y H, et al. Coordinate control, motion optimization and sea experiment of a fleet of petrel-II gliders[J]. Chinese Journal of Mechanical Engineering, 2018, 26 (1): 311- 315. |
| 151 | 刘祥玲. 复杂环境下无人潜航器编队协调控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. |
| LIU X L. Research on coordination control of multiple UUVs in complex environment[D]. Harbin: Harbin Engineering University, 2019. | |
| 152 | CHEN S, HO D W. Consensus control for multiple AUVs under imperfect information caused by communication faults[J]. Information Sciences, 2016, 370, 565- 577. |
| 153 |
HU Z L, MA C, ZHANG L X, et al. Formation control of impulsive networked autonomous underwater vehicles under fixed and switching topologies[J]. Neurocomputing, 2015, 147, 291- 298.
doi: 10.1016/j.neucom.2014.06.060 |
| 154 | HU C Q, FU L, YANG Y Y. Cooperative navigation and control for surface-underwater autonomous marine vehicles[C]// Proc. of the IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference, 2017: 589−592. |
| 155 |
闫敬, 徐龙, 曹文强, 等. 基于深度强化学习的多潜器编队控制算法设计[J]. 控制与决策, 2023, 38 (5): 1457- 1463.
doi: 10.13195/j.kzyjc.2022.1424 |
|
YAN J, XU L, CAO W Q, et al. Design of formation control algorithm for multiple autonomous underwater vehicles based on deep reinforcement learning[J]. Control and Decision, 2023, 38 (5): 1457- 1463.
doi: 10.13195/j.kzyjc.2022.1424 |
|
| 156 | SEILER P, SENGUPTA R. Analysis of communication losses in vehicle control problems[C]// Proc. of the American Control Conference, 2001: 1491−1496. |
| 157 |
王朝阳, 刁维卿, 徐博, 等. 自适应量测-通信联合框架下基于RMPC的AUV编队控制[J]. 控制与决策, 2024, 40 (1): 271- 278.
doi: 10.13195/j.kzyjc.2024.0010 |
|
WANG Z Y, DIAO W Q, XU B, et al. Distributed AUV formation control based on RMPC in adaptive measure-communication union framework[J]. Control and Decision, 2024, 40 (1): 271- 278.
doi: 10.13195/j.kzyjc.2024.0010 |
|
| 158 |
丁文俊, 张国宗, 刘海旻, 等. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45 (1): 184- 196.
doi: 10.12382/bgxb.2023.0417 |
|
DING W J, ZHANG G Z, LIU H M, et al. Tracking control of underactuated autonomous underwater vehicle formation under current disturbance and communication delay[J]. Acta Armamentarii, 2024, 45 (1): 184- 196.
doi: 10.12382/bgxb.2023.0417 |
|
| 40 |
KE C, CHEN H F, XIE L. Cross-domain fixed-time formation control for an air-sea heterogeneous unmanned system with disturbances[J]. Journal of Marine Science and Engineering, 2023, 11 (7): 1336.
doi: 10.3390/jmse11071336 |
| 41 |
BRANCH A, FLEXAS M M, CLAUS B, et al. Front delineation and tracking with multiple underwater vehicles[J]. Journal of Field Robotics, 2019, 36 (3): 568- 586.
doi: 10.1002/rob.21853 |
| 42 | WILLCOX S, GOLDBERG D, VAGANAY J, et al. Multi-vehicle cooperative navigation and autonomy with the bluefin cadre system[C]// Proc. of the International Federation of Automatic Control Conference, 2006: 20−22. |
| 43 | 邱子越. 无人艇将颠覆未来海战模式[EB/OL]. [2025-01-05]. http://www.81.cn/gfbmap/content/2019-02/13/content_227165.htm. |
| QIU Z Y. Unmanned surface vessels to revolutionize future naval warfare models[EB/OL]. [2025-01-05]. http://www.81.cn/gfbmap/content/2019-02/13/content_227165.htm. | |
| 44 | MUMFORD R. Ocean2020-European defence fund’s first research initiative[J]. Microwave Journal, 2018, 61 (2): 69. |
| 45 |
LI Y, MA T, CHEN P Y, et al. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation[J]. Ocean Engineering, 2017, 133, 107- 115.
doi: 10.1016/j.oceaneng.2017.01.026 |
| 46 |
丁文俊, 柴亚军, 杨宇贤, 等. 基于空海异构无人平台的水下目标搜索与跟踪[J]. 水下无人系统学报, 2024, 32 (2): 237- 249.
doi: 10.11993/j.issn.2096-3920.2024-0037 |
|
DING W J, CHAI Y J, YANG Y X, et al. Underwater target search and tracking based on air-sea heterogeneous unmanned platform[J]. Journal of Unmanned Undersea Systems, 2024, 32 (2): 237- 249.
doi: 10.11993/j.issn.2096-3920.2024-0037 |
|
| 47 |
王宁, 梁晓龙, 张佳强, 等. 跨域无人集群协同反潜搜索方法研究[J]. 系统仿真学报, 2024, 36 (4): 817- 824.
doi: 10.16182/j.issn1004731x.joss.23-0073 |
|
WANG N, LIANG X L, ZHANG J Q, et al. Research on cross-domain unmanned swarm cooperative anti-submarine search method[J]. Journal of System Simulation, 2024, 36 (4): 817- 824.
doi: 10.16182/j.issn1004731x.joss.23-0073 |
|
| 48 | 吴迪. 分布式多水下无人航行器搜捕任务协调方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2015. |
| 159 |
HUANG Y Y, LI W, NING J, et al. Formation control for UAV-USVs heterogeneous system with collision avoidance performance[J]. Journal of Marine Science and Engineering, 2023, 11 (12): 2332.
doi: 10.3390/jmse11122332 |
| 160 | ER M J, GONG H B, LIU Y, et al. Intelligent trajectory tracking and formation control of underactuated autonomous underwater vehicles: a critical review[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2023, 54 (1): 543- 555. |
| 161 |
PAN C, PENG Z H, LIU L, et al. Data-driven distributed formation control of under-actuated unmanned surface vehicles with collision avoidance via model-based deep reinforcement learning[J]. Ocean Engineering, 2023, 267, 113166.
doi: 10.1016/j.oceaneng.2022.113166 |
| 162 | WANG H B, LUO Q D, LI N, et al. Data-driven model free formation control for multi-USV system in complex marine environments[J]. International Journal of Control, Automation and Systems, 2022, 20 (11): 3666- 3677. |
| 163 |
CHAO C Z L, TAN H R, ZHANG X M, et al. Data-driven adaptive formation control based on preview mechanism for networked multi-robot systems with communication delays[J]. Neurocomputing, 2025, 620, 129151.
doi: 10.1016/j.neucom.2024.129151 |
| 164 | LV G H, PENG Z H, LIU L, et al. Barrier-certified distributed model predictive control of under-actuated autonomous surface vehicles via neurodynamic optimization[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 53 (1): 563- 575. |
| 165 |
XU J, WANG Y, XING W, et al. Model-free finite-time formation containment control of underactuated UUVs subject to input delays and unknown interaction information[J]. Ocean Engineering, 2023, 283, 115054.
doi: 10.1016/j.oceaneng.2023.115054 |
| 166 |
ZHANG D, N’DOYE I, BALLAL T, et al. Localization and tracking control using hybrid acoustic-optical communication for autonomous underwater vehicles[J]. IEEE Internet of Things Journal, 2020, 7 (10): 10048- 10060.
doi: 10.1109/JIOT.2020.2995799 |
| 167 |
ISLAM K Y, AHMAD I, HABIBI D, et al. Green underwater wireless communications using hybrid optical-acoustic technologies[J]. IEEE Access, 2021, 9, 85109- 85123.
doi: 10.1109/ACCESS.2021.3088467 |
| 168 |
GAUNI S, MANIMEGALAI C, KRISHNAN K M, et al. Design and analysis of co-operative acoustic and optical hybrid communication for underwater communication[J]. Wireless Personal Communications, 2021, 117, 561- 575.
doi: 10.1007/s11277-020-07883-1 |
| 169 |
DIAMANT R, CAMPAGNARO F, DE GRAZIA M D F, et al. On the relationship between the underwater acoustic and optical channels[J]. IEEE Trans. on Wireless Communications, 2017, 16 (12): 8037- 8051.
doi: 10.1109/TWC.2017.2756055 |
| 170 | MILLAN P, ORIHUELA L, JURADO I, et al. Formation control of autonomous underwater vehicles subject to communication delays[J]. IEEE Trans. on Control Systems Technology, 2013, 22 (2): 770- 777. |
| 48 | WU D. Research on cooperative strategies of distributed multiple AUVs for searching and hunting[D]. Harbin: Harbin Engineering University, 2015. |
| 49 |
王景璟, 魏维, 王永越, 等. 水下自主潜航器集群协同围捕技术[J]. 指挥与控制学报, 2023, 9 (6): 637- 650.
doi: 10.3969/j.issn.2096-0204.2023.06.0637 |
|
WANG J J, WEI W, WANG Y Y, et al. Autonomous underwater vehicle swarm collaborative hunting technologies[J]. Journal of Command and Control, 2023, 9 (6): 637- 650.
doi: 10.3969/j.issn.2096-0204.2023.06.0637 |
|
| 50 | CAO X, YU H C, SUN H B. Dynamic task assignment for multi-AUV cooperative hunting[J]. Intelligent Automation and Soft Computing, 2019, 25 (1): 25- 34. |
| 51 | CUI Y F, XU J, XING W, et al. Anti-disturbance cooperative formation containment control for multiple autonomous underwater vehicles with actuator saturation[J]. Ocean Engineering, 2022, 266: 113026. |
| 52 |
KALWA J. Final results of the european project GREX: coordination and control of cooperating marine robots[J]. IFAC Proceedings Volumes, 2010, 43 (16): 181- 186.
doi: 10.3182/20100906-3-IT-2019.00033 |
| 53 | KALWA J. The grex-project: coordination and control of cooperating heterogeneous unmanned systems in uncertain environments[C]// Proc. of the OCEANS 2009-EUROPE, 2009: 385−398. |
| 54 |
NI J J, YANG L, WU L Y, et al. An improved spinal neural system-based approach for heterogeneous AUVs cooperative hunting[J]. International Journal of Fuzzy Systems, 2018, 20 (2): 672- 686.
doi: 10.1007/s40815-017-0395-x |
| 55 | 张朦朦. 基于分层强化学习的MAUVS围捕策略研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. |
| ZHANG M M. Research on mauvs capture strategy based on hierarchical reinforcement learning[D]. Harbin: Harbin Engineering University, 2018. | |
| 56 |
CHEN M Z, ZHU D Q. A novel cooperative hunting algorithm for inhomogeneous multiple autonomous underwater vehicles[J]. IEEE Access, 2018, 6, 7818- 7828.
doi: 10.1109/ACCESS.2018.2801857 |
| 57 | 王杰. 多AUV围捕决策与行为协同控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. |
| 171 |
YAN Z P, YANG Z W, YUE L D, et al. Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays[J]. Ocean Engineering, 2019, 172, 361- 372.
doi: 10.1016/j.oceaneng.2018.12.018 |
| 172 |
SHAN Q H, CHEN Z Z, LI T H, et al. Consensus of multi-agent systems with impulsive perturbations and time-varying delays by dynamic delay interval method[J]. Communications in Nonlinear Science and Numerical Simulation, 2019, 78, 104890.
doi: 10.1016/j.cnsns.2019.104890 |
| 173 |
WEI H L, LIU C X, SHI Y. A robust distributed MPC framework for multi-agent consensus with communication delays[J]. IEEE Trans. on Automatic Control, 2024, 69 (11): 7418- 7432.
doi: 10.1109/TAC.2024.3389075 |
| 174 |
LI J, DU J L, LI Y P, et al. Distributed robust prescribed performance 3-D time-varying formation control of underactuated AUVs under input saturations and communication delays[J]. IEEE Journal of Oceanic Engineering, 2023, 48 (3): 649- 662.
doi: 10.1109/JOE.2023.3245671 |
| 175 | PENG Z H, JIANG Y, WANG J. Event-triggered dynamic surface control of an underactuated autonomous surface vehicle for target enclosing[J]. IEEE Trans. on Industrial Electronics, 2020, 68 (4): 3402- 3412. |
| 176 |
KIM J H, YOO S J. Adaptive event-triggered control strategy for ensuring predefined three-dimensional tracking performance of uncertain nonlinear underactuated underwater vehicles[J]. Mathematics, 2021, 9 (2): 137.
doi: 10.3390/math9020137 |
| 177 |
THUYEN N A, THANH P N N, ANH H P H. Distributed event-triggered adaptive finite-time formation control for multiple under-actuated AUVs using command filtered backstepping technique with prescribed performance[J]. European Journal of Control, 2025, 82, 101183.
doi: 10.1016/j.ejcon.2025.101183 |
| 178 |
FENG Z G, YAO S. Dynamic event-triggered active disturbance rejection formation control for constrained underactuated AUVS[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12 (2): 460- 462.
doi: 10.1109/JAS.2024.124617 |
| 179 |
ZHOU X T, XING X Y, QIN H D, et al. Communication-performance trade-off formation control for NAUVs: an interleaved event-triggered strategy[J]. Nonlinear Dynamics, 2025, 113, 8713- 8739.
doi: 10.1007/s11071-024-10744-2 |
| 180 |
COSTANZI R, FENUCCI D, MANZARI V, et al. Interoperability among unmanned maritime vehicles: review and first in-field experimentation[J]. Frontiers in Robotics and AI, 2020, 7, 91.
doi: 10.3389/frobt.2020.00091 |
| 181 | LÓPEZ D S, MORENO G, CORDERO J, et al. Search and rescue robotics-from theory to practice[M]. London: Intech, 2017. |
| 57 | WANG J. Research on multi-AUVS hunting decision-making and behavior cooperative control[D]. Harbin: Harbin Engineering University, 2018. |
| 58 | JON H. Navy’s project overmatch steams ahead at RIMPAC[EB/OL]. [2025-01-05]. https://defensescoop.com/2024/08/15/navy-project-overmatch-rimpac-2024-steams-ahead/. |
| 59 | Commander, U. S. 3rd Fleet Public Affairs. Inaugural unmanned battle problem 21 to begin april 19[EB/OL]. [2025-01-05]. https://www.c3f.navy.mil/News/Article/2786689/inaugural-unmanned-battle-problem-21-to-begin-april-19/. |
| 60 | Commander, U. S. 3rd Fleet Public Affairs. Integrated battle problem 23.1 kicks off[EB/OL]. [2025-01-05]. https://www.pacom.mil/Media/NEWS/News-Article-View/Article/3388585/integrated-battle-problem-231-kicks-off/. |
| 61 | Commander, U. S. 3rd Fleet Public Affairs. Integrated battle problem 23.2concludes as unmanned surface vessels return to homeport[EB/OL]. [2025-01-05]. https://www.navy.mil/Press-Office/News-Stories/Article/3645411/integrated-battle-problem-232-concludes-as-unmanned-surface-vessels-return-to-h/. |
| 62 | Commander, U. S. 3rd Fleet Public Affairs. Integrated battle problem 24.1 concludes[EB/OL]. [2025-01-05]. https://www.dvidshub.net/news/466700/integrated-battle-problem-241-concludes. |
| 63 | 宋逸哲, 刘妹琴, 董山玲, 等. 弱通信条件下多水下自主航行器分布式编队轨迹规划方法[J]. 控制与决策, 2024, 40 (1): 71- 79. |
| SONG Y Z, LIU M Q, DONG S L, et al. Distributed formation trajectory planning method for multiple autonomous underwater vehicles with limited communication[J]. Control and Decision, 2024, 40 (1): 71- 79. | |
| 64 |
YANG Y, XIAO Y, LI T S. A survey of autonomous underwater vehicle formation: performance, formation control, and communication capability[J]. IEEE Communications Surveys and Tutorials, 2021, 23 (2): 815- 841.
doi: 10.1109/COMST.2021.3059998 |
| 65 |
王宏健, 熊伟, 陈子印, 等. 多自主水下航行器区域搜索与协同围捕方法研究[J]. 中国造船, 2010, 51 (2): 117- 125.
doi: 10.3969/j.issn.1000-4882.2010.02.015 |
|
WANG H J, XIONG W, CHEN Z Y, et al. Research on methods of region searching and cooperative hunting for autonomous underwater vehicles[J]. Shipbuilding of China, 2010, 51 (2): 117- 125.
doi: 10.3969/j.issn.1000-4882.2010.02.015 |
|
| 66 |
闫敬, 张诗杭, 关新平, 等. 水下无人系统跨域协同控制: 研究进展与挑战[J]. 控制与决策, 2024, 40 (1): 7- 27.
doi: 10.13195/j.kzyjc.2024.0283 |
| 182 |
KOTIS K, STAVRINOS S, KALLONIATIS C. Review on semantic modeling and simulation of cybersecurity and interoperability on the internet of underwater things[J]. Future Internet, 2022, 15 (1): 11.
doi: 10.3390/fi15010011 |
| 183 |
KABANOV A, KRAMAR V. Marine internet of things platforms for interoperability of marine robotic agents: an overview of concepts and architectures[J]. Journal of Marine Science and Engineering, 2022, 10 (9): 1279.
doi: 10.3390/jmse10091279 |
| 184 | CHENG W L, ZHANG K, JIANG B. Distributed adaptive fixed-time fault-tolerant formation control for heterogeneous multiagent systems with a leader of unknown input[J]. IEEE Trans. on Cybernetics, 2022, 53 (11): 7285- 7294. |
| 185 | CHENG W L, ZHANG K, JIANG B. Hierarchical structure-based fixed-time optimal fault-tolerant time-varying output formation control for heterogeneous multiagent systems[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2023, 53 (8): 4856- 4866. |
| 186 |
ZHAO W, XIA Y, ZHAI D H, et al. Adaptive event-triggered coordination control of unknown autonomous underwater vehicles under communication link faults[J]. Automatica, 2023, 158, 111277.
doi: 10.1016/j.automatica.2023.111277 |
| 187 |
GAO M, NIU Y C, SHENG L. Distributed fault-tolerant state estimation for a class of nonlinear systems over sensor networks with sensor faults and random link failures[J]. IEEE Systems Journal, 2022, 16 (4): 6328- 6337.
doi: 10.1109/JSYST.2022.3142183 |
| 188 |
LIU S K, JIANG B, MAO Z H, et al. Adaptive fault-tolerant formation control of heterogeneous multi-agent systems under directed communication topology[J]. Sensors, 2022, 22 (16): 6212.
doi: 10.3390/s22166212 |
| 189 |
ZHU B Y, LIANG H J, NIU B, et al. Observer-based reinforcement learning for optimal fault-tolerant consensus control of nonlinear multi-agent systems via a dynamic event-triggered mechanism[J]. Information Sciences, 2025, 689, 121350.
doi: 10.1016/j.ins.2024.121350 |
| 190 | TONG S C, ZHOU H D, LI Y M. Neural network event-triggered formation fault-tolerant control for nonlinear multiagent systems with actuator faults[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2023, 53 (12): 7571- 7582. |
| 66 |
YAN J, ZHANG S H, GUAN X P, et al. Cross domain cooperative control of underwater unmanned systems: research progresses and challenges[J]. Control and Decision, 2024, 40 (1): 7- 27.
doi: 10.13195/j.kzyjc.2024.0283 |
| 67 |
YAMASHITA A, ARAI T, OTA J, et al. Motion planning of multiple mobile robots for cooperative manipulation and transportation[J]. IEEE Trans. on Robotics and Automation, 2003, 19 (2): 223- 237.
doi: 10.1109/TRA.2003.809592 |
| 68 |
BURLUTSKIY N, TOUAHMI Y, LEE B H. Power efficient formation configuration for centralized leader–follower AUVs control[J]. Journal of Marine Science and Technology, 2012, 17 (3): 315- 329.
doi: 10.1007/s00773-012-0167-0 |
| 69 |
GE X H, HAN Q L. Distributed formation control of networked multi-agent systems using a dynamic event-triggered communication mechanism[J]. IEEE Trans. on Industrial Electronics, 2017, 64 (10): 8118- 8127.
doi: 10.1109/TIE.2017.2701778 |
| 70 |
QU Z H, WANG J, HULL R A. Cooperative control of dynamical systems with application to autonomous vehicles[J]. IEEE Trans. on Automatic Control, 2008, 53 (4): 894- 911.
doi: 10.1109/TAC.2008.920232 |
| 71 |
游旭, 刘佳仑, 马枫, 等. 异构船舶编队航行的研究现状与技术展望[J]. 哈尔滨工程大学学报, 2023, 44 (1): 11- 22.
doi: 10.11990/jheu.202108016 |
|
YOU X, LIU J L, MA F, et al. Analysis and strategy development for the navigation of heterogeneous ship formations[J]. Journal of Harbin Engineering University, 2023, 44 (1): 11- 22.
doi: 10.11990/jheu.202108016 |
|
| 72 |
许真珍, 李一平, 封锡盛. 一个面向异构多UUV协作任务的分层式控制系统[J]. 机器人, 2008, 30 (2): 155- 159.
doi: 10.3321/j.issn:1002-0446.2008.02.011 |
|
XU Z Z, LI Y P, FENG X S. A hierarchical control system for heterogeneous multple UUV cooperation task[J]. Robot, 2008, 30 (2): 155- 159.
doi: 10.3321/j.issn:1002-0446.2008.02.011 |
|
| 73 | MARQUES F, SANTANA P, GUEDES M, et al. Online self-reconfigurable robot navigation in heterogeneous environments[C]// Proc. of the IEEE International Symposium on Industrial Electronics, 2013. |
| 74 | PINTO E, MARQUES F, MENDONÇA R, et al. An autonomous surface-aerial marsupial robotic team for riverine environmental monitoring: benefiting from coordinated aerial, underwater, and surface level perception[C]// Proc. of the IEEE International Conference on Robotics and Biomimetics, 2014: 443−450. |
| 75 |
SHAO J, XIE G, WANG L. Leader-following formation control of multiple mobile vehicles[J]. IET Control Theory and Applications, 2007, 1 (2): 545- 552.
doi: 10.1049/iet-cta:20050371 |
| 76 |
LEWIS M A, TAN K H. High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997, 4 (4): 387- 403.
doi: 10.1023/A:1008814708459 |
| 77 |
BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Trans. on Robotics and Automation, 1998, 14 (6): 926- 939.
doi: 10.1109/70.736776 |
| 78 | ZHAO W B, LIU H, LEWIS F L. Robust formation control for cooperative underactuated quadrotors via reinforcement learning[J]. IEEE Trans. on Neural Networks and Learning Systems, 2020, 32 (10): 4577- 4587. |
| 79 |
LIU H, MENG Q Y, PENG F C, et al. Heterogeneous formation control of multiple UAVs with limited-input leader via reinforcement learning[J]. Neurocomputing, 2020, 412, 63- 71.
doi: 10.1016/j.neucom.2020.06.040 |
| 80 |
CUI R X, GE S S, HOW B V E, et al. Leader–follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37 (17/18): 1491- 1502.
doi: 10.1016/j.oceaneng.2010.07.006 |
| 81 | CAO X, GUO L Q. A leader–follower formation control approach for target hunting by multiple autonomous underwater vehicle in three-dimensional underwater environments[J]. International Journal of Advanced Robotic Systems, 2019, 16(4): 1729881419870664. |
| 82 |
BECHLIOULIS C P, GIAGKAS F, KARRAS G C, et al. Robust formation control for multiple underwater vehicles[J]. Frontiers in Robotics and AI, 2019, 6, 90.
doi: 10.3389/frobt.2019.00090 |
| 83 |
LIU Y Y, LIN X G, LIU Y C, et al. Robust anti-perturbation safety control of multi-heterogeneous unmanned vessels[J]. Ocean Engineering, 2024, 291, 116473.
doi: 10.1016/j.oceaneng.2023.116473 |
| 84 |
高伟, 刘亚龙, 徐博. 基于双领航者的多AUV协同导航系统可观测性分析[J]. 系统工程与电子技术, 2013, 35 (11): 2370- 2375.
doi: 10.3969/j.issn.1001-506X.2013.11.23 |
|
GAO W, LIU Y L, XU B. Observability analysis of cooperative navigation system for multiple AUV basedon two-leaders[J]. Systems Engineering and Electronics, 2013, 35 (11): 2370- 2375.
doi: 10.3969/j.issn.1001-506X.2013.11.23 |
|
| 85 |
CAO W Q, YAN J, YANG X, et al. Communication-aware formation control of AUVs with model uncertainty and fading channel via integral reinforcement learning[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10 (1): 159- 176.
doi: 10.1109/JAS.2023.123021 |
| 86 | 王振威, 刘凯, 郭健, 等. 一种基于领导-跟随策略的多无人机-多无人艇编队协同机制[J]. 航空学报, 2023, 44 (S2): 453- 468. |
| WANG Z W, LIU K, GUO J, et al. A multi-UAVs and multi-USVs formation cooperative mechanism based on leader-follower strategy[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (S2): 453- 468. | |
| 87 | 郑海滨. 无人艇和无人机水空跨域协同编队技术研究与实现[D]. 武汉: 华中科技大学, 2022. |
| [1] | 张佳龙, 赵迪, 张普, 叶磊. 通讯受限下无人机集群自适应追踪控制[J]. 系统工程与电子技术, 2025, 47(10): 3401-3410. |
| [2] | 靳健, 陈伯翰. 载人航天器组合体CO2分压控制策略分析[J]. 系统工程与电子技术, 2018, 40(6): 1351-1357. |
| [3] | 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38(4): 821-827. |
| [4] | 符小卫, 冯慧成, 高晓光. 通信距离约束下双无人机目标跟踪算法[J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1663-1668. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||