
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (5): 1638-1645.doi: 10.12305/j.issn.1001-506X.2025.05.25
• 制导、导航与控制 • 上一篇
吕佰梁1,2, 刘闯1,2,*, 岳晓奎1,2
收稿日期:2024-05-28
出版日期:2025-06-11
发布日期:2025-06-18
通讯作者:
刘闯
作者简介:吕佰梁 (1998—), 男, 博士研究生, 主要研究方向为航天器动力学与控制、鲁棒控制基金资助:Bailiang LYU1,2, Chuang LIU1,2,*, Xiaokui YUE1,2
Received:2024-05-28
Online:2025-06-11
Published:2025-06-18
Contact:
Chuang LIU
摘要:
随着航天工程的逐步实施, 航天器正朝着高速、大尺度、多功能的大型化和复杂化方向发展, 强鲁棒非脆弱高精高稳控制技术是保证航天器在复杂太空环境下正常运行并成功实施空间任务的有效保障。本文梳理非脆弱控制理论的起源及发展, 进而总结基于线性矩阵不等式(linear matrix inequality, LMI)方法的鲁棒非脆弱控制器在航天器轨道及姿态控制中的应用, 在考虑加法式摄动和乘法式摄动的条件下, 进一步说明非脆弱状态反馈控制器、输出反馈控制器、干扰观测器及中间状态观测器的设计方法, 并对未来航天器非脆弱控制方法的发展与应用提出展望, 为航天器鲁棒非脆弱控制方法的研究探索提供思考, 以满足日益复杂的航天器高精高稳控制任务需求。
中图分类号:
吕佰梁, 刘闯, 岳晓奎. 航天器非脆弱控制理论及应用研究进展[J]. 系统工程与电子技术, 2025, 47(5): 1638-1645.
Bailiang LYU, Chuang LIU, Xiaokui YUE. Advances in theory and application of spacecraft non-fragile control[J]. Systems Engineering and Electronics, 2025, 47(5): 1638-1645.
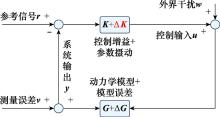
图1
鲁棒非脆弱控制系统框架图"
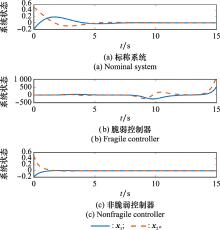
图2
增益摄动仿真结果"
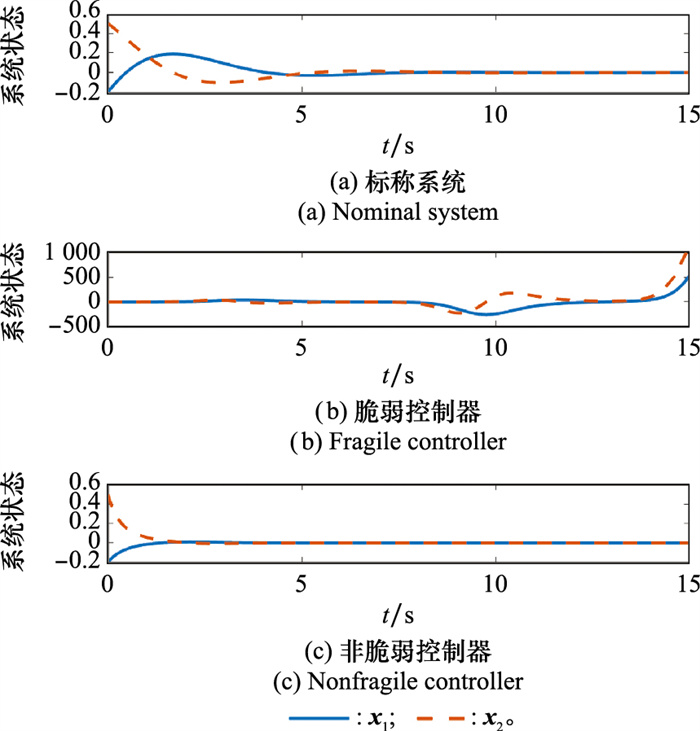
图3
基于非脆弱控制器的闭环系统框图"
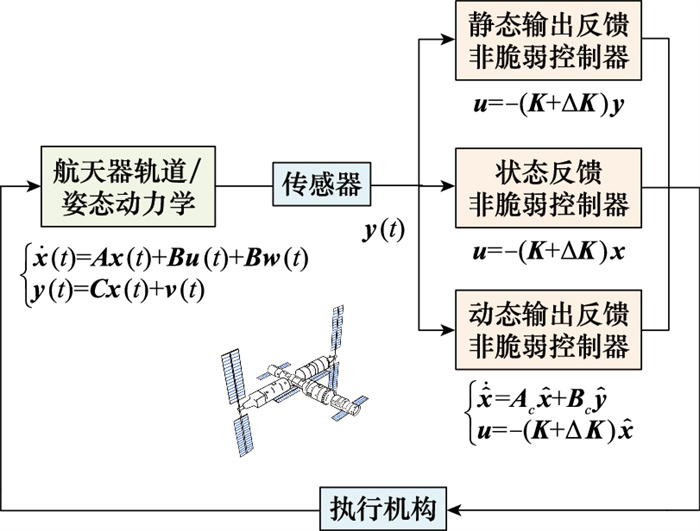
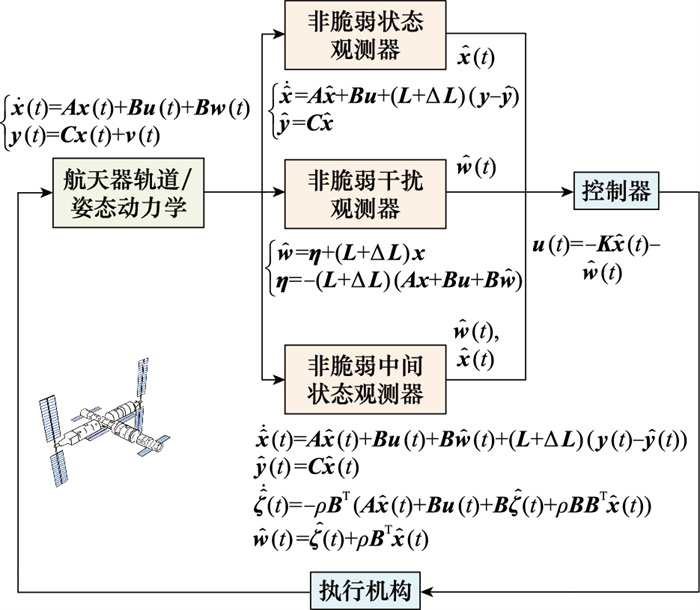
图4
基于非脆弱观测器的闭环系统框图"
| 1 | 曹登庆, 白坤朝, 丁虎, 等. 大型柔性航天器动力学与振动控制研究进展[J]. 力学学报, 2019, 51 (1): 1- 13. |
| CAO D Q , BAI K C , DING H , et al. Advances in dynamics and vibration control of large-scale flexible spacecraft[J]. Chinese Journal of Theoretical and Applied Mechanics, 2019, 51 (1): 1- 13. | |
| 2 |
刘聪, 李海锋, 王明明, 等. 空间桁架在轨装配机器人的运动规划方法[J]. 系统工程与电子技术, 2024, 46 (2): 715- 721.
doi: 10.12305/j.issn.1001-506X.2024.02.35 |
|
LIU C , LI H F , WANG M M , et al. Robot motion planning method for space truss on-orbit assembly[J]. System Engineering and Electronics, 2024, 46 (2): 715- 721.
doi: 10.12305/j.issn.1001-506X.2024.02.35 |
|
| 3 |
LIU C , MA Y Q , YUE X K , et al. Improved sliding mode tracking control for spacecraft electromagnetic separation supporting on-orbit assembly[J]. Advances in Space Research, 2024, 73 (9): 4711- 4720.
doi: 10.1016/j.asr.2024.01.034 |
| 4 |
胡越欣, 张立华, 高永, 等. 空间引力波探测航天器关键技术分析[J]. 航天器工程, 2022, 31 (4): 1- 7.
doi: 10.3969/j.issn.1673-8748.2022.04.001 |
|
HU Y X , ZHANG L H , GAO Y , et al. Analysis of key tech nologies of spacecraft for gravitational waves detection in space[J]. Spacecraft Engineering, 2022, 31 (4): 1- 7.
doi: 10.3969/j.issn.1673-8748.2022.04.001 |
|
| 5 | 郑永洁, 王泽国. 嫦娥五号探测器GNC系统设计[J]. 空间控制技术与应用, 2021, 47 (5): 68- 74. |
| ZHENG Y J , WANG Z G . Chang'E-5 guidance, navigation, and control system design[J]. Aerospace Control and Application, 2021, 47 (5): 68- 74. | |
| 6 | 赵宇, 王晓磊, 黄翔宇, 等. 天问一号火星软着陆制导、导航与控制系统[J]. 空间控制技术与应用, 2021, 47 (5): 48- 57. |
| ZHAO Y , WANG X L , HUANG X Y , et al. Tianwen-1 lander guidance navigation and control system for Mars soft landing[J]. Aerospace Control and Application, 2021, 47 (5): 48- 57. | |
| 7 | 袁利, 姜甜甜, 魏春岭, 等. 空间控制技术发展与展望[J]. 自动化学报, 2023, 49 (3): 476- 493. |
| YUAN L , JIANG T T , WEI C L , et al. Advances and perspectives of space control technology[J]. Acta Automatica Sinica, 2023, 49 (3): 476- 493. | |
| 8 | 胡庆雷, 邵小东, 杨昊旸, 等. 航天器多约束姿态规划与控制: 进展与展望[J]. 航空学报, 2022, 43 (10): 403- 431. |
| HU Q L , SHAO X D , YANG H Y , et al. Spacecraft attitude planning and control under multiple constraints: review and prospects[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (10): 403- 431. | |
| 9 |
HAO Z W , YUE X K , WEN H W , et al. Full-state-constrained non-certainty-equivalent adaptive control for satellite swarm subject to input fault[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9 (3): 482- 495.
doi: 10.1109/JAS.2021.1004216 |
| 10 |
柯晓曼, 吴云华, 郑墨泓, 等. 基于改进迭代学习的参数不确定卫星姿态控制[J]. 系统工程与电子技术, 2021, 43 (2): 508- 518.
doi: 10.12305/j.issn.1001-506X.2021.02.25 |
|
KE X M , WU Y H , ZHENG M H , et al. Attitude control for spacecraft with uncertain parameters based on improved iterative learning[J]. Systems Engineering and Electronics, 2021, 43 (2): 508- 518.
doi: 10.12305/j.issn.1001-506X.2021.02.25 |
|
| 11 |
REN J J , TANG S , CHEN T . Adaptive sliding mode control of spacecraft attitude-orbit dynamics on SE(3)[J]. Advances in Space Research, 2023, 71 (1): 525- 538.
doi: 10.1016/j.asr.2022.09.007 |
| 12 |
GAO H , XIA Y Q , ZHANG J H , et al. Finite-time fault-tolerant output feedback attitude control of spacecraft formation with guaranteed performance[J]. International Journal of Robust and Nonlinear Control, 2021, 31 (10): 4664- 4688.
doi: 10.1002/rnc.5504 |
| 13 |
NAJAFIZADEH S N , JAHANSHAHI H , FAKOOR M . Adaptive fuzzy PID control strategy for spacecraft attitude control[J]. International Journal of Fuzzy Systems, 2019, 21, 769- 781.
doi: 10.1007/s40815-018-0576-2 |
| 14 | YANG C , XIA Y Q . Interval uncertainty-oriented optimal control method for spacecraft attitude control[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59 (5): 5460- 5471. |
| 15 |
LYU B L , YUE X K , LIU C . Constrained multi-observer-based fault-tolerant disturbance-rejection control for rigid spacecraft[J]. International Journal of Robust and Nonlinear Control, 2022, 32 (14): 8102- 8133.
doi: 10.1002/rnc.6270 |
| 16 |
LIU C , YUE X K , ZHANG J Q , et al. Active disturbance rejection control for delayed electromagnetic docking of spacecraft in elliptical orbits[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 58 (3): 2257- 2268.
doi: 10.1109/TAES.2021.3130830 |
| 17 |
KEEL L H , BHATTACHARYYA S P . Robust, fragile, or optimal?[J]. IEEE Trans.on Automatic Control, 1997, 42 (8): 1098- 1105.
doi: 10.1109/9.618239 |
| 18 | 何朕, 饶丹, 王广雄, 等. 控制系统的脆弱性与鲁棒性[J]. 电机与控制学报, 2011, 15 (4): 80- 84. |
| HE Z , RAO D , WANG G X , et al. Fragility and robustness of the control system[J]. Electric Machines and Control, 2011, 15 (4): 80- 84. | |
| 19 | DORATO P. Non-fragile controller design: an overview[C]//Proc. of the American Control Conference, 1998: 2829-2831. |
| 20 | JADBABAIE A, ABDALLAH C T, FAMULARO D, et al. Robust, non-fragile and optimal controller design via linear matrix inequalities[C]//Proc. of the American Control Confe-rence, 1998: 2842-2846. |
| 21 | GAHINET P, NEMIROVSKII A, LAUB A J, et al. The LMI control toolbox[C]//Proc. of the IEEE 33rd Conference On Decision and Control, 1994: 2038-2041. |
| 22 | BALAS G J, PACKARD A K, SAFONOV M G, et al. Next generation of tools for robust control[C]//Proc. of the American Control Conference, 2004: 5612-5615. |
| 23 |
FAMULARO D , DORATO P , ABDALLAH C T , et al. Ro bust non-fragile LQ controllers: the static state feedback case[J]. International Journal of Control, 2000, 73 (2): 159- 165.
doi: 10.1080/002071700219867 |
| 24 |
YANG G H , WANG J L . Non-fragile H∞ control for linear systems with multiplicative controller gain variations[J]. Automatica, 2001, 37 (5): 727- 737.
doi: 10.1016/S0005-1098(01)00008-5 |
| 25 | DU H P , LAM J , SZE K Y . Non-fragile H∞ vibration control for uncertain structural systems[J]. Journal of Sound and Vibration, 2004, 273 (4/5): 1031- 1045. |
| 26 | XU S Y , LAM J , WANG J L , et al. Non-fragile positive real control for uncertain linear neutral delay systems[J]. Systems & Control Letters, 2004, 52 (1): 59- 74. |
| 27 | ZHANG B Y , ZHOU S S , LI T . A new approach to robust and non-fragile H∞ control for uncertain fuzzy systems[J]. Information Sciences, 2007, 177 (22): 5118- 5133. |
| 28 | PENG X J , HE Y . Consensus of multi-agent systems with state and input delays via non-fragile protocol[J]. International Journal of Systems Science, 2022, 53 (12): 2584- 2596. |
| 29 | DING K , ZHU Q X , LI H D . A generalized system approach to intermittent nonfragile control of stochastic neutral time-vary- ing delay systems[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2020, 51 (11): 7017- 7026. |
| 30 | ZHANG J H , SHI P , QIU J Q . Non-fragile guaranteed cost control for uncertain stochastic nonlinear time-delay systems[J]. Journal of the Franklin Institute, 2009, 346 (7): 676- 690. |
| 31 | LI F B , SHI P , WU L G , et al. Fuzzy-model-based D-stability and nonfragile control for discrete-time descriptor systems with multiple delays[J]. IEEE Trans.on Fuzzy Systems, 2013, 22 (4): 1019- 1025. |
| 32 | KAVIKUMAR R , SAKTHIVEL R , KAVIARASAN B , et al. Non-fragile control design for interval-valued fuzzy systems against nonlinear actuator faults[J]. Fuzzy Sets and Systems, 2019, 365, 40- 59. |
| 33 | SHEN H , LI F , WU Z G , et al. Fuzzy-model-based nonfragile control for nonlinear singularly perturbed systems with semi-Markov jump parameters[J]. IEEE Trans.on Fuzzy systems, 2018, 26 (6): 3428- 3439. |
| 34 | ZHANG Y , TANG G Y , HU N P . Non-fragile control for nonlinear networked control systems with long time-delay[J]. Computers & Mathematics with Applications, 2009, 57 (10): 1630- 1637. |
| 35 | CHEN L P , LI T T , WU R C , et al. Non-fragile control for a class of fractional-order uncertain linear systems with time-delay[J]. IET Control Theory & Applications, 2020, 14 (12): 1575- 1589. |
| 36 | ANAND S , DEV A , SARKAR M K , et al. Non-fragile approach for frequency regulation in power system with event-triggered control and communication delays[J]. IEEE Trans.on Industry Applications, 2021, 57 (3): 2187- 2201. |
| 37 | SAKTHIVEL R , PARIVALLAL A , HUY T N , et al. Nonfragile control design for consensus of semi-Markov jumping multiagent systems with disturbances[J]. International Journal of Adaptive Control and Signal Processing, 2021, 35 (6): 1039- 1061. |
| 38 | WU Y Q , SU H Y , LU R Q , et al. Passivity-based non-fragile control for Markovian jump systems with aperiodic sampling[J]. Systems & Control Letters, 2015, 84, 35- 43. |
| 39 | YANG H Y , ZHANG J F , JIA X L , et al. Non-fragile control of positive Markovian jump systems[J]. Journal of the Franklin Institute, 2019, 356 (5): 2742- 2758. |
| 40 | SAKTHIVEL R , KANAKALAKSHMI S , KAVIARASAN B , et al. Finite-time consensus of input delayed multi-agent sys tems via non-fragile controller subject to switching topology[J]. Neurocomputing, 2019, 325, 225- 233. |
| 41 | SAKTHIVEL R , SANTRA S , KAVIARASAN B , et al. Dissipative analysis for network-based singular systems with non-fragile controller and event-triggered sampling scheme[J]. Journal of the Franklin Institute, 2017, 354 (12): 4739- 4761. |
| 42 | 岳晓奎, 吕佰梁, 刘闯, 等. 基于神经网络干扰观测器的柔性航天器姿态稳定控制[J]. 上海航天(中英文), 2022, 39 (4): 58- 65. |
| YUE X K , LYU B L , LIU C , et al. Neural network distur-bance observer-based attitude control for flexible spacecrafts[J]. Aerospace Shanghai (Chinese & English), 2022, 39 (4): 58- 65. | |
| 43 | GAO X Y , TEO K L , DUAN G R . Non-fragile guaranteed cost control for robust spacecraft orbit transfer with small thrust[J]. IMA Journal of Mathematical Control and Information, 2011, 28 (4): 507- 524. |
| 44 | GAO X Y , TEO K L , DUAN G R . Non-fragile robust H∞ control for uncertain spacecraft rendezvous system with pole and input constraints[J]. International Journal of Control, 2012, 85 (7): 933- 941. |
| 45 | GAO X Y, ZHANG X, TAN J L. Non-fragile guaranteed cost control for spacecraft rendezvous[C]//Proc. of the 11th World Congress on Intelligent Control and Automation, 2014: 4402- 4407. |
| 46 | ZHANG K , DUAN G R . Robust H∞ dynamic output feedback control for spacecraft rendezvous with poles and input con straint[J]. International Journal of Systems Science, 2017, 48 (5): 1022- 1034. |
| 47 | LIU C , SUN Z W , SHI K K , et al. Robust dynamic output feedback control for attitude stabilization of spacecraft with nonlinear perturbations[J]. Aerospace Science and Technology, 2017, 64, 102- 121. |
| 48 | LIU C , SHI K K , YUE X K , et al. Inertia-free saturated output feedback attitude stabilization for uncertain spacecraft[J]. International Journal of Robust and Nonlinear Control, 2020, 30 (13): 5101- 5121. |
| 49 | LIU C , SHI K K , SUN Z W . Robust H∞ controller design for attitude stabilization of flexible spacecraft with input constraints[J]. Advances in Space Research, 2019, 63 (5): 1498- 1522. |
| 50 | KUMAR S V , RAJA R , ANTHONI S M , et al. Robust finite-time non-fragile sampled-data control for TS fuzzy flexible spacecraft model with stochastic actuator faults[J]. Applied Mathematics and Computation, 2018, 321, 483- 497. |
| 51 | LIU C , YUE X K , YANG Z Y . Are nonfragile controllers always better than fragile controllers in attitude control perfor-mance of post-capture flexible spacecraft?[J]. Aerospace Science and Technology, 2021, 118, 107053. |
| 52 | LI Y . Multi-objective non-fragile robust attitude control for flexible microsatellite close-proximity inspection[J]. IEEE Access, 2021, 9, 94251- 94261. |
| 53 | DING K , ZHU Q X . Reliable intermittent extended dissipative control for uncertain fuzzy flexible spacecraft systems with Bernoulli stochastic distribution[J]. IET Control Theory & Applications, 2021, 15 (7): 911- 925. |
| 54 | HAN T J , KIM H S . Disturbance observer-based nonfragile fuzzy tracking control of a spacecraft[J]. Advances in Space Research, 2023, 71 (9): 3600- 3612. |
| 55 | LYU B L , LIU C , YUE X K . Hybrid nonfragile intermediate observer-based TS fuzzy attitude control for flexible spacecraft with input saturation[J]. Aerospace Science and Technology, 2022, 128, 107753. |
| 56 | YANG Z Y , LIU C , YUE X K , et al. Non-fragile negative imaginary output feedback control for attitude stabilization of flexible spacecraft[J]. Acta Astronautica, 2023, 208, 296- 310. |
| 57 | LI Q J , DENG Z C . Coordinated orbit-attitude-vibration control of a Sun-facing solar power satellite[J]. Journal of Gui-dance, Control, and Dynamics, 2019, 42 (8): 1863- 1869. |
| 58 | LI W J , CHENG D Y , LIU X G , et al. On-orbit service (OOS) of spacecraft: a review of engineering developments[J]. Progress in Aerospace Sciences, 2019, 108, 32- 120. |
| 59 | SHI K K , LIU C , SUN Z W , et al. Coupled orbit-attitude dynamics and trajectory tracking control for spacecraft electromagnetic docking[J]. Applied Mathematical Modelling, 2022, 101, 553- 572. |
| 60 |
赵宏亮, 张元文, 杨乐平, 等. 空间目标远距离磁控方法及应用分析[J]. 系统工程与电子技术, 2024, 46 (1): 261- 270.
doi: 10.12305/j.issn.1001-506X.2024.01.30 |
|
ZHAO H L , ZHANG Y W , YANG L P , et al. Method and application analysis of remote magnetic controlling for space target[J]. Systems Engineering and Electronics, 2024, 46 (1): 261- 270.
doi: 10.12305/j.issn.1001-506X.2024.01.30 |
|
| 61 | TIPALDI M , IERVOLINO R , MASSENIO P R . Reinforcement learning in spacecraft control applications: advances, prospects, and challenges[J]. Annual Reviews in Control, 2022, 54, 1- 23. |
| 62 | WEI C S , XIONG Y W , CHEN Q F , et al. On adaptive attitude tracking control of spacecraft: a reinforcement learning based gain tuning way with guaranteed performance[J]. Advances in Space Research, 2023, 71 (11): 4534- 4548. |
| [1] | 胡涛, 申立群, 付晋, 范天祥. 航天伺服机构鲁棒控制与机电液联合仿真[J]. 系统工程与电子技术, 2023, 45(10): 3218-3225. |
| [2] | 高升, 马广富, 郭延宁. 基于自适应未知输入观测器的多故障快速重构[J]. 系统工程与电子技术, 2022, 44(7): 2364-2373. |
| [3] | 贾庆贤, 张承玺, 李化义, 张迎春. 基于新型学习观测器的卫星执行机构故障重构[J]. 系统工程与电子技术, 2019, 41(12): 2835-2841. |
| [4] | 郭致远, 姚晓先, 张鑫. 鲁棒增益调度结构化火箭弹控制系统设计[J]. 系统工程与电子技术, 2018, 40(3): 615-622. |
| [5] | 朱威, 马伟明, 阳习党, 肖欢. 基于鲁棒故障诊断LPV模型的舰载QUAV跟踪控制[J]. 系统工程与电子技术, 2018, 40(11): 2540-. |
| [6] | 陈诚, 韦常柱, 琚啸哲, 刘鹏云. 基于滑模观测补偿的四旋翼飞行器鲁棒动态逆控制[J]. 系统工程与电子技术, 2018, 40(1): 119-126. |
| [7] | 宋江鹏, 周荻, 孙广利. 基于扩张观测器的反射镜平台自适应鲁棒控制[J]. 系统工程与电子技术, 2017, 39(4): 876-882. |
| [8] | 赵顺利1, 尹逊和1, 魏学业1, LAM Hakkeung2. 基于模型的网络控制系统设计:切换控制的平均驻留时间法[J]. 系统工程与电子技术, 2016, 38(8): 1899-1908. |
| [9] | 张银辉, 杨华波, 江振宇, 张为华. 基于干扰估计的高超声速飞行器鲁棒控制方法[J]. 系统工程与电子技术, 2016, 38(4): 875-881. |
| [10] | 王佳伟, 沈毅, 王振华. 基于未知输入观测器方法的非线性切换系统故障检测[J]. 系统工程与电子技术, 2015, 37(10): 2322-2328. |
| [11] | 张迎春, 贾庆贤, 李化义, 耿云海. 基于比例积分观测器的卫星姿控系统鲁棒故障重构[J]. 系统工程与电子技术, 2014, 36(9): 1810-1818. |
| [12] | 陈芙蓉, 尹燕燕, 刘飞. 部分转移概率未知的Markov跳变系统鲁棒故障检测[J]. 系统工程与电子技术, 2014, 36(9): 1819-1825. |
| [13] | 钱华明, 彭宇, 崔玫, 富振铎. 基于LMI的不确定系统鲁棒故障检测观测器设计[J]. 系统工程与电子技术, 2014, 36(6): 1162-1168. |
| [14] | 王青, 王通, 后德龙, 董朝阳. 基于速度线性化的变体飞行器鲁棒LPV控制[J]. 系统工程与电子技术, 2014, 36(6): 1130-1136. |
| [15] | 胡剑波, 李飞, 魏高乐, 高鹏, 王强. 不确定系统反推滑模变结构理论及其应用[J]. 系统工程与电子技术, 2014, 36(3): 519-526. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||