
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (7): 2371-2382.doi: 10.12305/j.issn.1001-506X.2025.07.29
张岳, 王晶, 王鼎衡, 代昌华, 段援朝, 刘保荣, 张霄嵩
收稿日期:2024-09-18
出版日期:2025-07-16
发布日期:2025-07-22
通讯作者:
张岳
作者简介:张岳(1999—), 男, 研究实习员, 硕士, 主要研究方向为无人车自主导航、路径规划基金资助:Yue ZHANG, Jing WANG, Dingheng WANG, Changhua DAI, Yuanchao DUAN, Baorong LIU, Xiaosong ZHANG
Received:2024-09-18
Online:2025-07-16
Published:2025-07-22
Contact:
Yue ZHANG
摘要:
针对无人车自主导航过程中对行人避障时未考虑目标运动趋势所导致的避障效果欠佳的问题, 提出一种基于行人轨迹预测的无人车动态避障方法。首先, 利用深度相机和目标检测算法完成行人的识别及位置解算, 并通过跟踪获得行人位置的时序信息。其次, 将一维卷积神经网络(convolutional neural network, CNN)和双向门控循环单元(bidirectional gated recurrent unit, BiGRU)相结合, 并融入注意力(attention, ATT)机制, 构建CNN-BiGRU-ATT行人轨迹预测模型, 由行人当前位置序列预测未来轨迹。最后, 通过Bresenham算法将行人当前位置及轨迹预测结果叠加在代价地图上, 使得全局和局部路径规划算法提前规避碰撞风险。实验表明, 基于深度相机的行人检测、定位方法能够准确计算行人历史轨迹, 为轨迹预测模型提供可靠的输入; 基于CNN-BiGRU-ATT的行人轨迹预测模型在多种运动状态下预测误差更小。融入轨迹预测结果的代价地图可提高路径规划的前瞻性, 避免无人车频繁更改全局和局部路径, 降低导航任务用时和碰撞风险。
中图分类号:
张岳, 王晶, 王鼎衡, 代昌华, 段援朝, 刘保荣, 张霄嵩. 基于行人轨迹预测的无人车动态避障方法[J]. 系统工程与电子技术, 2025, 47(7): 2371-2382.
Yue ZHANG, Jing WANG, Dingheng WANG, Changhua DAI, Yuanchao DUAN, Baorong LIU, Xiaosong ZHANG. Dynamic obstacle avoidance method for unmanned vehicle based on pedestrian trajectory prediction[J]. Systems Engineering and Electronics, 2025, 47(7): 2371-2382.
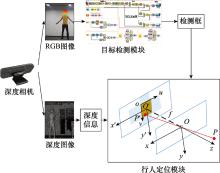
图1
行人检测定位框架"
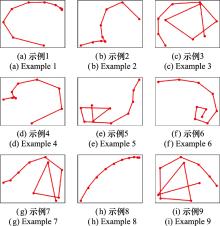
图2
行人轨迹示例"
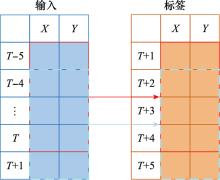
图3
轨迹预测数据集构建"
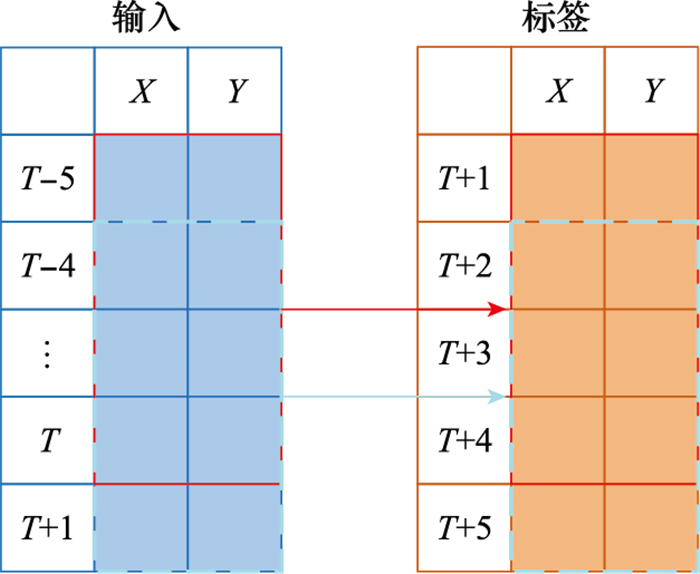
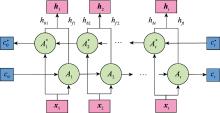
图4
BiGRU结构"
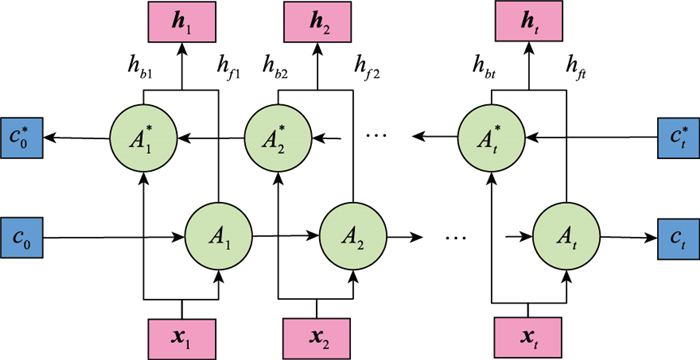

图5
加入时间ATT机制的BiGRU"
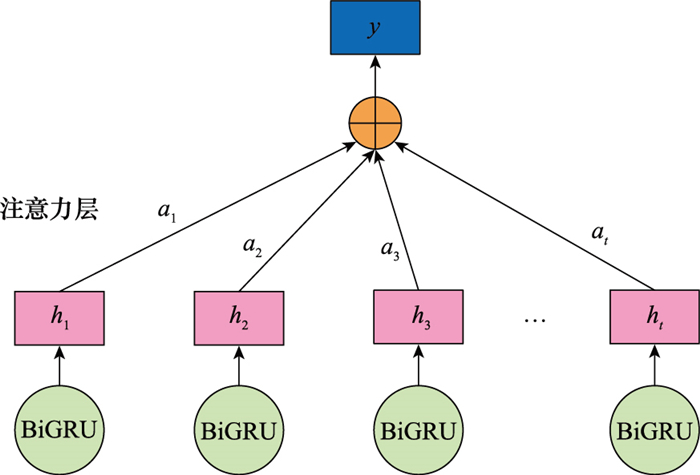

图6
行人轨迹预测模型整体结构"
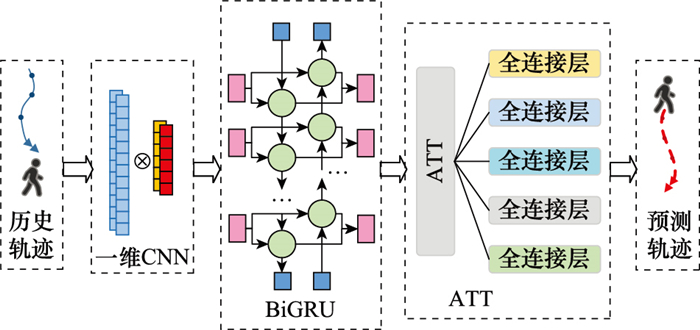
图7
多层代价地图构成"
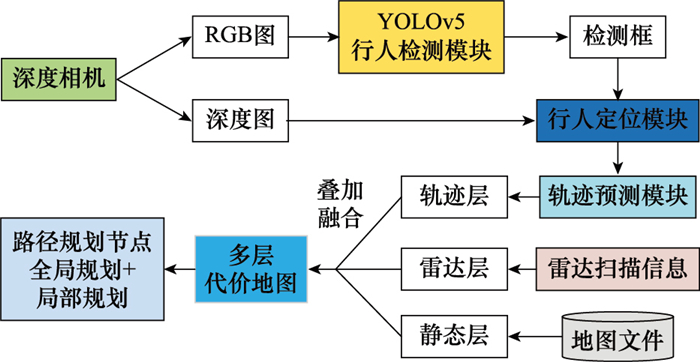
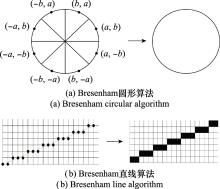
图8
Bresenham算法"
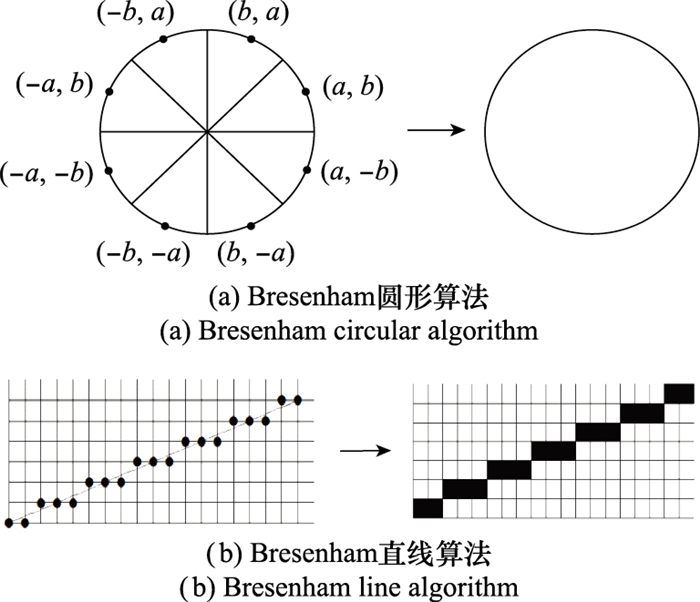
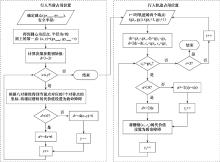
图9
行人及轨迹占用栅格绘制流程"
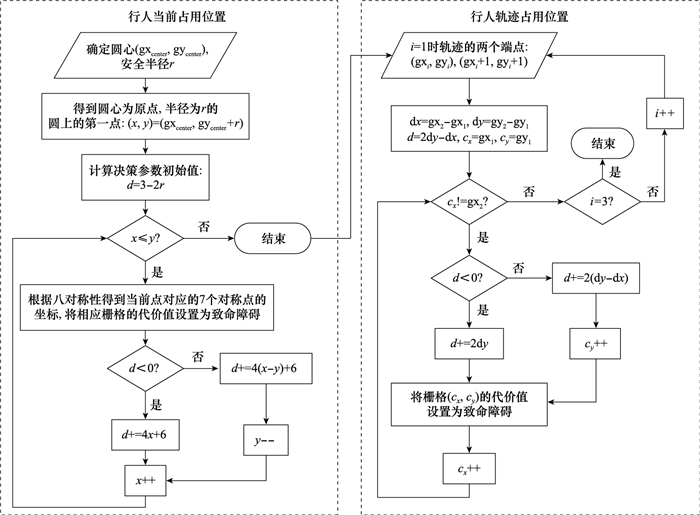

图10
融入行人轨迹前后代价地图及路径规划对比"
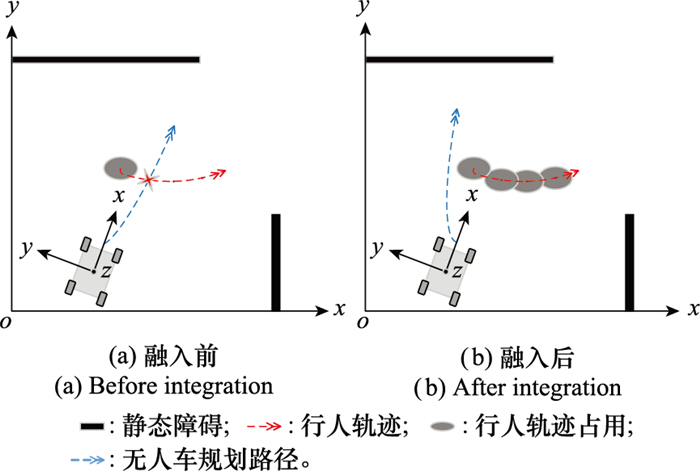
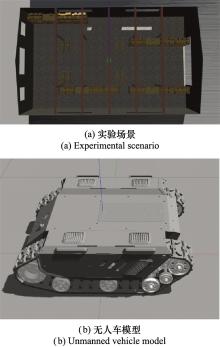
图11
仿真实验平台搭建"
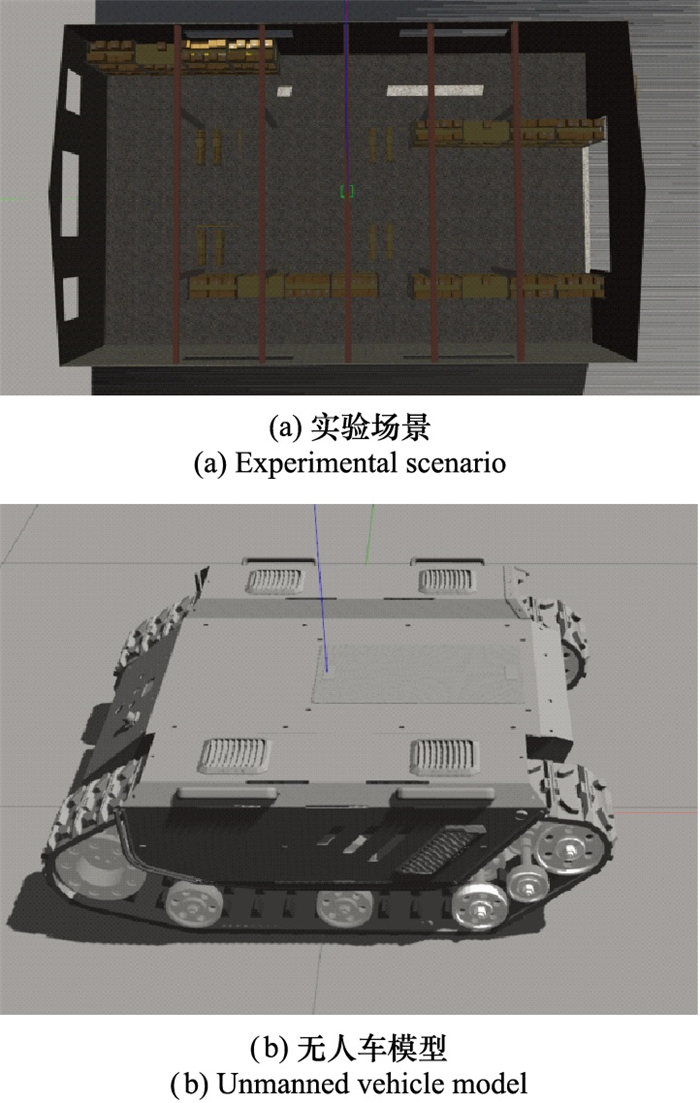
表1
无人车及深度相机关键参数"
| 参数名称 | 参数值 | |
| 车辆运动参数 | 最大线速度/(m/s) | 1.5 |
| 最大角速度/(rad/s) | 1.57 | |
| 最大线加速度/(m/s2) | 3 | |
| 最大角加速度/(rad/s2) | 3.14 | |
| 深度相机参数 | 图像尺寸/(px)2 | 1 280×960 |
| 深度探测范围/m | 10 | |
| 相机内参/px | fx=fy=298.447 8 cx=640;cy=480 | |

图12
基于深度相机的行人识别"
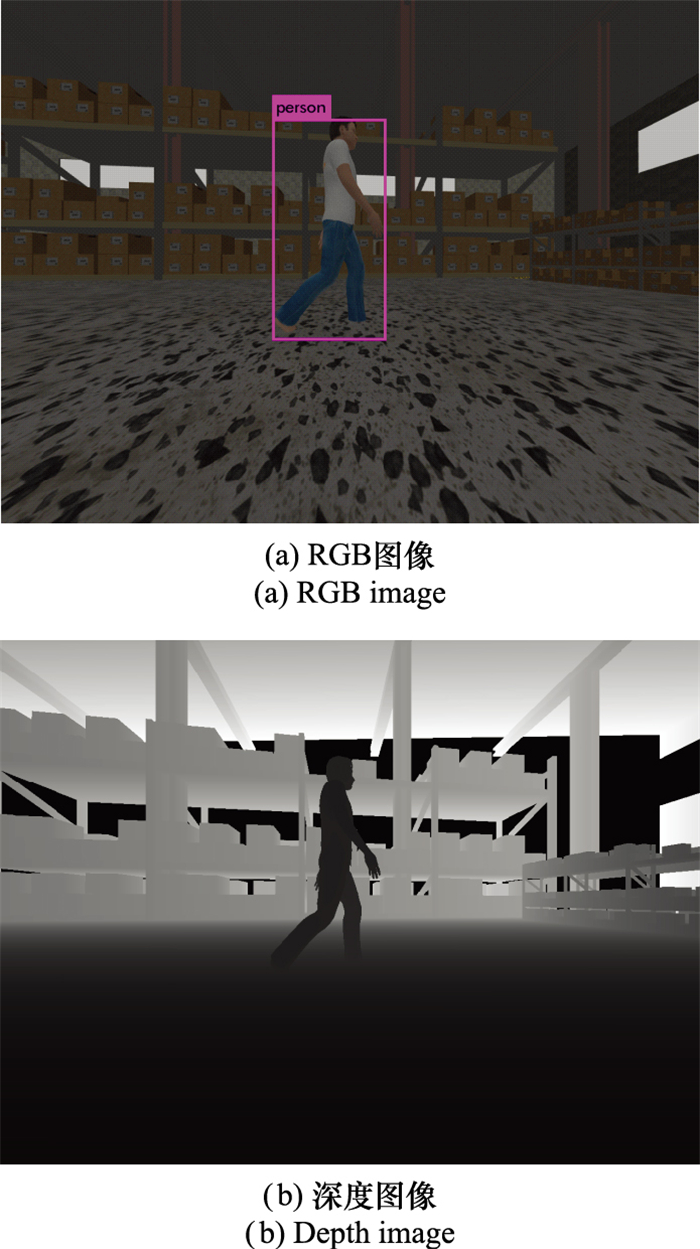
表2
静态行人定位验证"
| 序号 | 无人车位姿/(m, m, rad) | 行人真实坐标/m | 检测框像素坐标/px | 检测框深度/m | 行人定位坐标/m |
| 1 | (0, 0, 0) | (2, 0) | (578, 266)(752, 583) | 1.39 | (2.06, -0.02) |
| 2 | (1, 1, π/4) | (3, 3) | (528, 3379)(614, 547) | 2.23 | (2.86, 2.99) |
| 3 | (2, 5, π/2) | (4, 8) | (836, 343)(949, 546) | 2.38 | (3.89, 8.01) |

图13
动态行人连续定位结果"
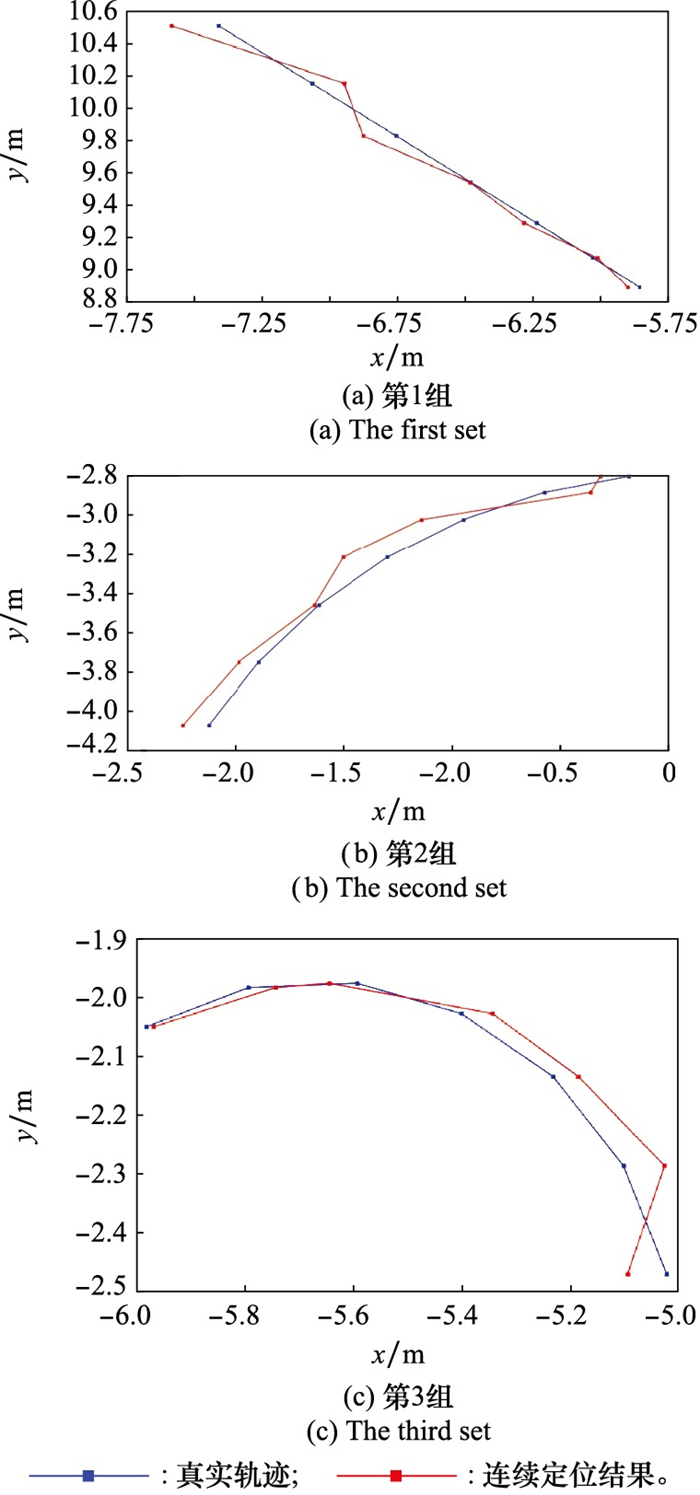
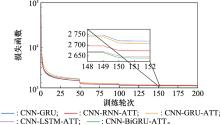
图14
误差下降曲线对比"
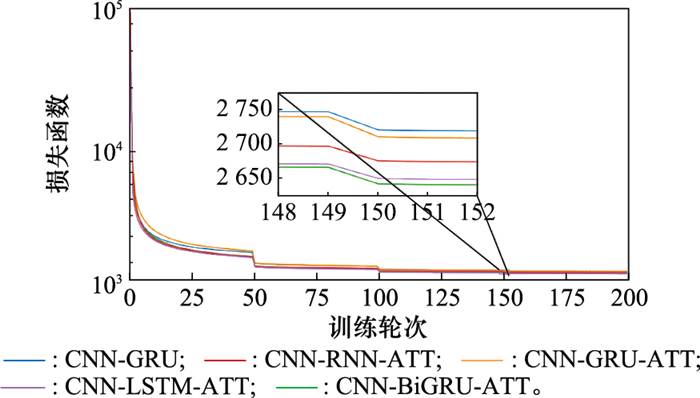
表3
轨迹预测模型评价指标对比"
| 算法 | MAE | RMSE | MAPE |
| CNN-GRU | 0.278 5 | 0.494 1 | 0.017 8 |
| CNN-RNN-ATT | 0.356 5 | 0.518 5 | 0.038 5 |
| CNN-GRU-ATT | 0.410 8 | 0.606 6 | 0.028 0 |
| CNN-LSTM-ATT | 0.357 9 | 0.520 2 | 0.012 0 |
| CNN-BiGRU-ATT | 0.157 9 | 0.236 6 | 0.006 4 |

图15
轨迹预测效果对比"

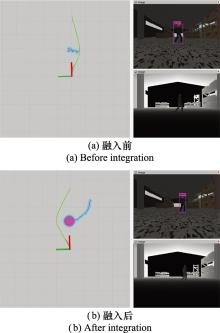
图16
融入行人定位及轨迹预测前后代价地图和路径规划对比"
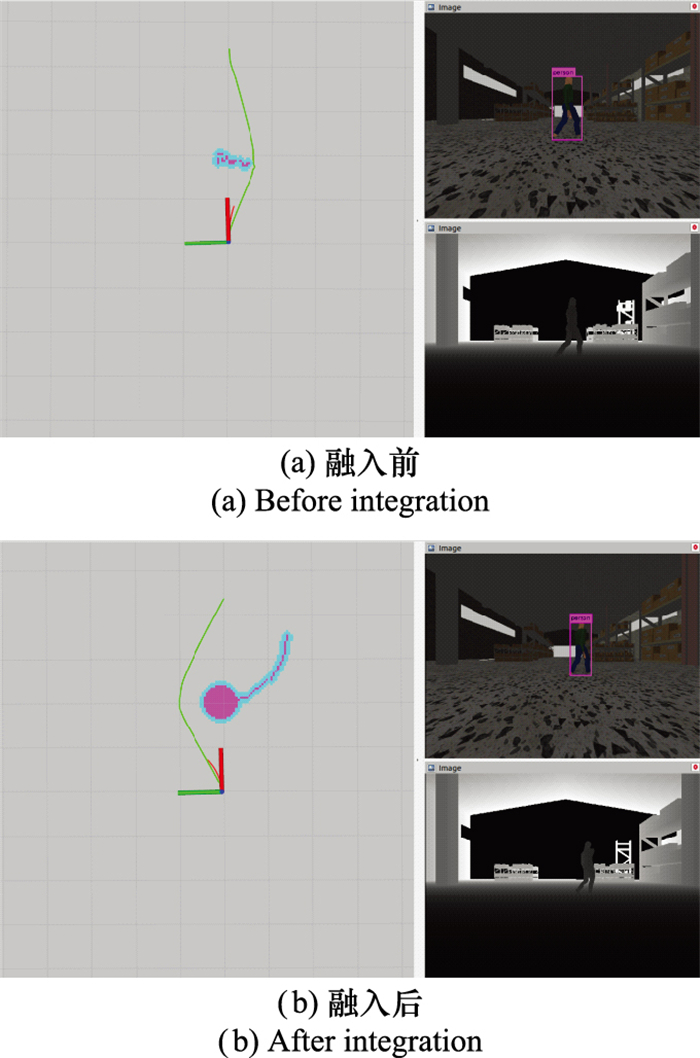
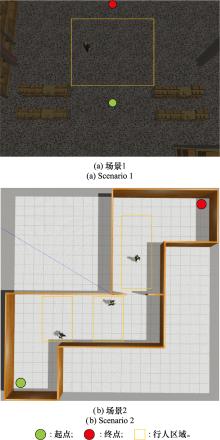
图17
动态行人避障实验场景"
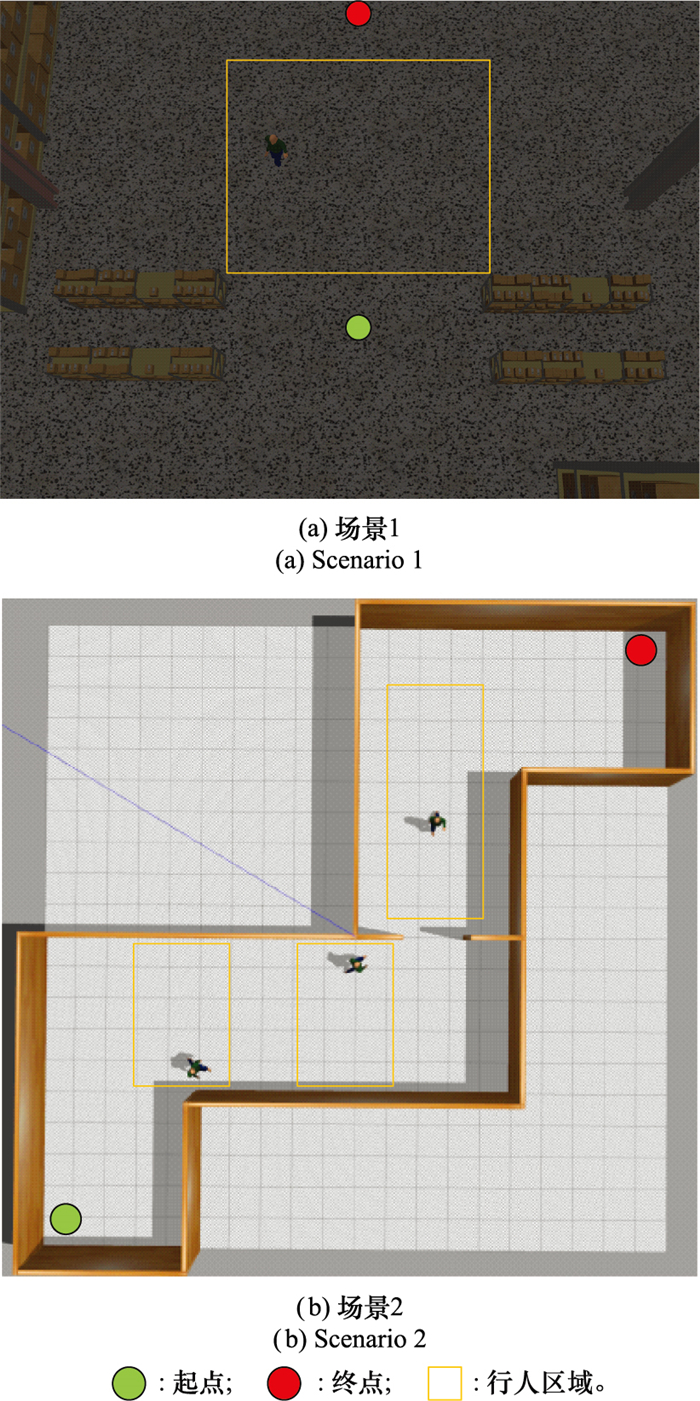
表4
动态避障效果对比"
| 参数 | 状态 | 场景1 | 场景2 |
| 最短用时/s | 融入前 | 10.87 | 46.26 |
| 融入后 | 10.53 | 45.74 | |
| 平均用时/s | 融入前 | 13.28 | 53.17 |
| 融入后 | 11.27 | 47.39 | |
| 最小距离/m | 融入前 | 0.23 | 0.24 |
| 融入后 | 0.67 | 0.58 |
| 1 | 孙毅, 宋乐, 王桂芝. 2019年国外地面无人自主系统发展综述[J]. 飞航导弹, 2020 (1): 30- 34. |
| SUN Y , SONG L , WANG G Z . Overview of the development of ground unmanned autonomous systems abroad in 2019[J]. Aviation Missile, 2020 (1): 30- 34. | |
| 2 | 周鲜成, 王莉, 周开军, 等. 动态车辆路径问题的研究进展及发展趋势[J]. 控制与决策, 2019, 34 (3): 449- 458. |
| ZHOU X C , WANG L , ZHOU K J , et al. Research progress and development trends of dynamic vehicle routing problems[J]. Control and Decision Making, 2019, 34 (3): 449- 458. | |
| 3 | PEREIRA F U , BRASIL P M D A , CUADROS M A D S L , et al. Analysis of local trajectory planners for mobile robot with robot operating system[J]. Latin America Transactions, 2022, 20 (1): 92- 99. |
| 4 |
王梓强, 胡晓光, 李晓筱, 等. 移动机器人全局路径规划算法综述[J]. 计算机科学, 2021, 48 (10): 19- 29.
doi: 10.11896/jsjkx.200700114 |
|
WANG Z Q , HU X G , LI X X , et al. Overview of global path planning algorithms for mobile robots[J]. Computer Science, 2021, 48 (10): 19- 29.
doi: 10.11896/jsjkx.200700114 |
|
| 5 | MARTINEZ-ROZAS S , ALEJO D , CABALLERO F , et al. Path and trajectory planning of a tethered UAV-UGV marsupial robotic system[J]. IEEE Robotics and Automation Letters, 2023, 8 (10): 6475- 6482. |
| 6 | KWAME A B B , RYAD C , YAW A A , et al. An overview of nature-inspired, conventional, and hybrid methods of autonomous vehicle path planning[J]. Journal of Advanced Transportation, 2018, 2018 (4): 8269698. |
| 7 | BROTEE S , KABIR F , RAZZAQUE M A , et al. Optimizing UAV-UGV coalition operations: a hybrid clustering and multi- agent reinforcement learning approach for path planning in obstructed environment[J]. Ad Hoc Networks, 2024, 160 (1): 103519. |
| 8 | CHEKOL A G , FUFA M S . A survey on next location prediction techniques, applications, and challenges[J]. EURASIP Journal on Wireless Communications and Networking, 2022, 2022 (1): 29. |
| 9 | 颜鹏, 郭继峰, 白成超. 考虑移动目标不确定行为方式的轨迹预测方法[J]. 宇航学报, 2022, 43 (8): 1040- 1051. |
| YAN P , GUO J F , BAI C C . A trajectory prediction method considering uncertain behavior patterns of moving targets[J]. Journal of Astronautics, 2022, 43 (8): 1040- 1051. | |
| 10 | WU H R, WANG L K, ZHENG S F, et al. Crossing-road pedestrian trajectory prediction based on intention and behavior identification[C]//Proc. of the IEEE 23rd International Confe-rence on Intelligent Transportation Systems, 2020. |
| 11 | 陈明强, 傅嘉赟. 基于无迹卡尔曼滤波的飞行航迹预测方法研究[J]. 计算机仿真, 2021, 38 (6): 27-30, 36. |
| CHEN M Q , FU J Y . Research on flight trajectory prediction method based on unscented Kalman filter[J]. Computer Simulation, 2021, 38 (6): 27-30, 36. | |
| 12 | CHEN Y F. Predictive modeling and socially aware motion planning in dynamic, uncertain environments[D]. Boston: Massachusetts Institute of Technology, 2017. |
| 13 | GARZON M, GARZON-RAMOS D, BARRIENTOS A, et al. Pedestrian trajectory prediction in large infrastructures—a long-term approach based on path planning[C]//Proc. of the International Conference on Informatics in Control, Automation and Robotics, 2016: 381-389. |
| 14 | GAO J Y, SUN C, ZHAO H, et al. Vectornet: encoding hd maps and agent dynamics from vectorized representation[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11525-11533. |
| 15 | BHUJEL N, TEOH E K, YAU W Y. Pedestrian trajectory prediction using RNN encoder-decoder with spatio-temporal attentions[C]//Proc. of the IEEE 5th International Conference on Mechatronics System and Robots, 2019: 110-114. |
| 16 | GUAN H G, GUO P. Research on pedestrian trajectory prediction by GAN model based on LSTM[C]//Proc. of the IEEE 3rd International Conference on Power, Electronics and Computer Applications, 2023: 1400-1405. |
| 17 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proc. of the Computer Vision & Pattern Recognition, 2016. |
| 18 | NAZIR A, WANI M. You only look once-object detection models: a review[C]//Proc. of the 10th International Confe-rence on Computing for Sustainable Global Development, 2023: 1088-1095. |
| 19 |
ZHOU C , REN D C , ZHANG X Y , et al. Human position detection based on depth camera image information in mechanical safety[J]. Advances in Mathematical Physics, 2022,
doi: 10.1155/2022/9170642 |
| 20 | ANBU N A , PINAGAPANI A K , MANI G , et al. Improved vehicle navigation using sensor fusion of inertial, odometeric sensors with global positioning system[J]. International Journal of Vehicle Autonomous Systems, 2020, 15 (3/4): 307. |
| 21 | 潘献飞, 宁治文, 王茂松, 等. 基于因子图的导航定位技术应用分析与思考[J]. 控制理论与应用, 2023, 40 (12): 2130- 2141. |
| PAN X F , NING Z W , WANG M S , et al. Analysis and reflection on the application of navigation and positioning techno-logy based on factor graph[J]. Control Theory and Application, 2023, 40 (12): 2130- 2141. | |
| 22 | 高帅. 基于行人轨迹预测的局部路径规划与跟踪方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| GAO S. Research on local path planning and tracking method based on pedestrian trajectory prediction[D]. Harbin: Harbin Institute of Technology, 2022. | |
| 23 |
谢磊, 丁达理, 魏政磊, 等. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43 (6): 1651- 1658.
doi: 10.12305/j.issn.1001-506X.2021.06.23 |
|
XIE L , DING D L , WEI Z L , et al. Real time prediction of maneuvering trajectories using AdaBoost PSO-LSTM network[J]. Systems Engineering and Electronics, 2021, 43 (6): 1651- 1658.
doi: 10.12305/j.issn.1001-506X.2021.06.23 |
|
| 24 | ZHANG B L , ZHOU W . Transformer-encoder-GRU (T-E-GRU) for Chinese sentiment analysis on chinese comment text[J]. Neural Processing Letters, 2022, 55 (2): 1847- 1867. |
| 25 | ABUMOHSEN M , OWDA A Y , OWDA M . Electrical load forecasting using LSTM, GRU, and RNN algorithms[J]. Energies, 2023, 16 (5): 2283. |
| 26 | MIM T R , AMATULLAH M , AFREEN S , et al. GRU-INC: an inception-attention based approach using GRU for human activity recognition[J]. Expert Systems with Applications, 2023, 216, 119419. |
| 27 | MAHJOUB S , CHRIFI L , MARHIC B , et al. Predicting energy consumption using LSTM, multi-layer GRU and drop-GRU neural networks[J]. Sensors, 2022, 22 (11): 4062. |
| 28 | HRISTOV P. Real-time abnormal human activity detection using 1DCNN-LSTM for 3D skeleton data[C]//Proc. of the 12th National Conference with International Participation, 2021. |
| 29 | 王堃, 周志崇, 曲凯, 等. 基于注意力机制的CNN-LSTM模型的航迹预测[J]. 空军工程大学学报, 2023, 24 (6): 50- 57. |
| WANG K , ZHOU Z C , QU K , et al. Track prediction based on attention mechanism using CNN-LSTM model[J]. Journal of Air Force Engineering University, 2023, 24 (6): 50- 57. | |
| 30 | LU D V, HERSHBERGER D, SMART W D. Layered costmaps for context-sensitive navigation[C]//Proc. of the International Conference on Intelligent Robots & Systems, 2014. |
| 31 | CAO M H , LIU S Y , CAO F H . Midpoint distance circle generation algorithm based on midpoint circle algorithm and Bresenham circle algorithm[J]. Journal of Physics: Conference Series, 2020, 1438 (1): 012017. |
| 32 | ZHANG Y X , ZHANG K R , WU C H , et al. Comparative analysis of DDA algorithm and Bresenham algorithm[J]. International Journal of Intelligent Internet of Things Computing, 2022, 1 (4): 263- 272. |
| [1] | 卢山, 张世源, 侯月阳, 张晓彤, 李晴. 深空探测中考虑乘性噪声影响的自主导航滤波算法设计[J]. 系统工程与电子技术, 2025, 47(1): 287-295. |
| [2] | 李卫斌, 秦晨浩, 张天一, 毛鑫, 杨东浩, 纪文搏, 侯彪, 焦李成. 综述: 类脑智能导航建模技术及其应用[J]. 系统工程与电子技术, 2024, 46(11): 3844-3861. |
| [3] | 黄万炎, 杜万和, 杨淑珍, 俞涛. 改进的多项式曲线拟合轨迹预测算法[J]. 系统工程与电子技术, 2024, 46(1): 280-289. |
| [4] | 戴礼灿, 刘欣, 张海瀛, 代翔, 王成刚. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J]. 系统工程与电子技术, 2023, 45(6): 1814-1820. |
| [5] | 宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512. |
| [6] | 李明杰, 周池军, 雷虎民, 邵雷, 骆长鑫. 基于控制参数估计的再入滑翔目标智能轨迹预测算法[J]. 系统工程与电子技术, 2023, 45(1): 221-233. |
| [7] | 谢磊, 丁达理, 魏政磊, 汤安迪, 张鹏. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43(6): 1651-1658. |
| [8] | 张宏鹏, 黄长强, 轩永波, 唐上钦. 用门控循环单元实时预测空战飞行轨迹[J]. 系统工程与电子技术, 2020, 42(11): 2546-2552. |
| [9] | 孟光磊, 周铭哲, 朴海音, 张慧敏. 基于协同战术识别的双机编队威胁评估方法[J]. 系统工程与电子技术, 2020, 42(10): 2285-2293. |
| [10] | 李世杰, 雷虎民, 周池军, 张涛. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42(10): 2320-2327. |
| [11] | 李璟璟, 张玉兔, 王文从, 胡慧君, 邵思霈. X射线源/地心矢量观测的卫星自主导航应用[J]. 系统工程与电子技术, 2018, 40(11): 2534-. |
| [12] | 韩春耀, 熊家军, 张凯, 兰旭辉. 高超声速飞行器分解集成轨迹预测算法[J]. 系统工程与电子技术, 2018, 40(1): 151-158. |
| [13] | 王路, 邢清华, 毛艺帆. 基于升阻比变化规律的再入高超声速滑翔飞行器轨迹预测算法[J]. 系统工程与电子技术, 2015, 37(10): 2335-2340. |
| [14] | 朱晓辉,张军. 基于似然轨迹预测的空中交通复杂度评估方法[J]. 系统工程与电子技术, 2014, 36(2): 300-305. |
| [15] | 徐国栋,李鹏飞,董立珉,侯天蕊. 卫星自主轨道估计方法及其高阶非线性滤波器设计[J]. 系统工程与电子技术, 2014, 36(1): 117-122. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||