
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (12): 3896-3907.doi: 10.12305/j.issn.1001-506X.2023.12.19
• 系统工程 • 上一篇
刘大千, 包卫东, 费博雯, 朱晓敏
收稿日期:2022-05-07
出版日期:2023-11-25
发布日期:2023-12-05
通讯作者:
包卫东
作者简介:刘大千 (1992—), 男, 副研究员, 博士, 主要研究方向为智能无人系统、目标检测与跟踪基金资助:Daqian LIU, Weidong BAO, Bowen FEI, Xiaomin ZHU
Received:2022-05-07
Online:2023-11-25
Published:2023-12-05
Contact:
Weidong BAO
摘要:
在城市环境中, 建筑物或不可达区域等因素的影响易造成多无人机(unmanned aerial vehicle, UAV)协同路径规划策略失效, 从而导致目标搜索任务的失败。针对此问题, 提出未知城市环境下的多UAV协同搜索(multi-unmanned aerial vehicle cooperative search, MUCS)方法。首先, 对城市环境进行建模, 其中涵盖密集建筑物群的设计和运动状态多样的目标, 以增强目标搜索任务的挑战性; 然后, 在此基础上, 综合考虑UAV编队飞行约束和信息交互能力, 构建基于信息共享代价和区域覆盖收益的协同优化模型; 最后, 根据多UAV协同编队特点, 利用群智能方法进行优化求解, 确保每架UAV均能得到最优路径可行解, 从而提高多UAV协同目标搜索效率。与现有搜索方法相比, MUCS方法的平均目标发现成功率提升了20%, 区域覆盖率提升了10%。实验结果表明, MUCS方法具有较强的目标搜索能力和区域覆盖能力。
中图分类号:
刘大千, 包卫东, 费博雯, 朱晓敏. 未知城市环境下的多机协同目标搜索方法研究[J]. 系统工程与电子技术, 2023, 45(12): 3896-3907.
Daqian LIU, Weidong BAO, Bowen FEI, Xiaomin ZHU. Research on multi-UAV cooperative target search method under unknown urban environment[J]. Systems Engineering and Electronics, 2023, 45(12): 3896-3907.

图1
区域Ω的栅格化地图"


图2
目标与无人机的运动方向标识"


图3
MUCS的整体架构"


图4
双曲正切函数的示例"


图5
无人机编队的收益与代价示例"


图6
协同目标搜索流程"

表1
无人机初始状态"
| 无人机 | 初始位置 | 网格索引 | 初始方向 |
| U1 | (50, 750) | (1, 15) | 4 |
| U2 | (50, 1 500) | (1, 30) | 0 |
| U3 | (50, 2 250) | (1, 45) | 4 |
| U4 | (750, 50) | (15, 1) | 6 |
| U5 | (1 500, 50) | (30, 1) | 6 |
| U6 | (2 250, 50) | (45, 1) | 2 |
| U7 | (3 050, 50) | (61, 1) | 0 |
| U8 | (3 050, 750) | (61, 15) | 4 |
| U9 | (3 050, 1 500) | (61, 30) | 0 |
| U10 | (750, 3 050) | (15, 61) | 6 |
| U11 | (1 500, 3 050) | (30, 61) | 4 |
| U12 | (2 250, 3 050) | (45, 61) | 4 |
表2
目标初始状态"
| 目标 | 初始位置 | 网格索引 | 初始方向 |
| T1 | (850, 850) | (17, 17) | 0 |
| T2 | (850, 1 650) | (17, 33) | 4 |
| T3 | (850, 2 250) | (17, 45) | 2 |
| T4 | (1 650, 850) | (33, 17) | 0 |
| T5 | (1 650, 1 650) | (33, 33) | 2 |
| T6 | (1 650, 2 250) | (33, 45) | 4 |
| T7 | (2 250, 850) | (45, 17) | 0 |
| T8 | (2 250, 1 650) | (45, 33) | 2 |
| T9 | (2 250, 2 250) | (45, 45) | 4 |
表3
SSA初始参数"
| 指标参数 | SSA |
| 最大迭代次数 | 100 |
| 候选样本数量 | 10 |
| 样本维度 | 24 |
| 发现者数量 | 6 |
| 追随者数量 | 6 |
| 警戒者数量 | 3 |
| 位移量 | [-2, 2] |

图7
3种方法在400个周期下的3D飞行路径"


图8
MUCS在3个不同搜索周期下的无人机运动轨迹"
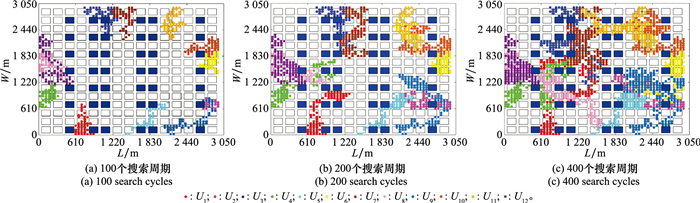

图9
MUCS在3个不同搜索周期下的目标运动轨迹"


图10
MUCS在3个不同搜索周期下的机间距离"


图11
SSA在3个不同搜索周期下的无人机运动轨迹"


图12
SSA在3个不同搜索周期下的目标运动轨迹"

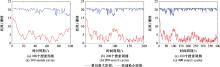
图13
SSA在3个不同搜索周期下的机间距离"


图14
DPM在3个不同搜索周期下的无人机运动轨迹"


图15
DPM在3个不同搜索周期下的目标运动轨迹"


图16
DPM在3个不同搜索周期下的机间距离"

表4
3种方法在400个周期下的发现目标位置"
| 发现目标位置 | 搜索方法 | ||
| MUCS | SSA | DMP | |
| T1 | (17, 11) | (17, 11) | (17, 19) |
| T2 | (45, 17) | (37, 42) | - |
| T3 | (25, 28) | - | (21, 57) |
| T4 | (33, 38) | (33, 42) | (33, 10) |
| T5 | (35, 33) | (28, 41) | (33, 33) |
| T6 | (33, 36) | (37, 56) | (46, 57) |
| T7 | (45, 14) | (45, 15) | (45, 19) |
| T8 | (42, 41) | (51, 29) | - |
| T9 | (47, 41) | (41, 49) | (29, 49) |
表5
3种方法的定量对比"
| 搜索方法 | 搜索周期/s | 发现目标数量/个 | 区域覆盖率/% |
| MUCS | 100 | 2 | 23.28 |
| 200 | 6 | 42.57 | |
| 400 | 9 | 73.58 | |
| SSA | 100 | 2 | 20.34 |
| 200 | 6 | 41.53 | |
| 400 | 8 | 72.49 | |
| DPM | 100 | 4 | 19.20 |
| 200 | 6 | 39.36 | |
| 400 | 7 | 61.09 |
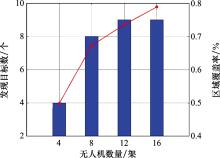
图17
MUCS在400个周期下的搜索结果"

表6
MUCS在不同周期下的搜索结果"
| 无人机数量 | 搜索周期/s | 发现目标数/个 | 区域覆盖率/% |
| N=4 | 100 | 0 | 8.49 |
| 200 | 2 | 21.27 | |
| 400 | 4 | 49.84 | |
| N=8 | 100 | 1 | 14.54 |
| 200 | 3 | 34.33 | |
| 400 | 8 | 67.31 | |
| N=12 | 100 | 2 | 23.28 |
| 200 | 6 | 42.57 | |
| 400 | 9 | 73.58 | |
| N=16 | 100 | 5 | 35.45 |
| 200 | 9 | 65.15 | |
| 400 | 9 | 78.93 |

图18
不同探测半径下的搜索结果"

表7
MUCS在不同探测半径下的搜索结果"
| 探测半径 | 搜索周期/s | 发现目标数量/个 | 区域覆盖率/% |
| r=1 | 50 | 0 | 10.76 |
| 100 | 2 | 23.28 | |
| 200 | 6 | 42.57 | |
| r=2 | 50 | 6 | 11.02 |
| 100 | 9 | 21.28 | |
| 200 | 9 | 37.28 | |
| r=3 | 50 | 8 | 10.34 |
| 100 | 9 | 21.84 | |
| 200 | 9 | 35.54 |
| 1 |
LIU D Q , BAO W D , ZHU X M , et al. Cooperative path optimization for multiple UAVs surveillance in uncertain environment[J]. IEEE Internet of Things Journal, 2022, 9 (13): 10676- 10692.
doi: 10.1109/JIOT.2021.3125784 |
| 2 |
GUPTA A , FERNANDO X . Simultaneous localization and mapping (SLAM) and data fusion in unmanned aerial vehicles: recent advances and challenges[J]. Drones, 2022, 6 (4): 85.
doi: 10.3390/drones6040085 |
| 3 |
DUAN H B , ZHAO J , DENG Y M , et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (1): 706- 720.
doi: 10.1109/TAES.2020.3029624 |
| 4 |
HAN R , WEN Y Q , BAI L , et al. Age of information aware UAV deployment for intelligent transportation systems[J]. IEEE Trans.on Intelligent Transportation Systems, 2022, 23 (3): 2705- 2715.
doi: 10.1109/TITS.2021.3117974 |
| 5 |
NIELSEN L , SUNG I , NIELSEN P . Convex decomposition for a coverage path planning for autonomous vehicles: interior extension of edges[J]. Sensors, 2019, 19 (19): 4165.
doi: 10.3390/s19194165 |
| 6 | 谢朋志, 魏晨. 单侧区域分割的多无人机扫描线搜索方法研究[J]. 航空兵器, 2020, 27 (3): 67- 72. |
| XIE P Z , WEI C . Research on scanning line search method for multi-UAV based on unilateral region segmentation[J]. Aero Weaponry, 2020, 27 (3): 67- 72. | |
| 7 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划研究[J]. 航空学报, 2020, 41 (S1): 723770. |
| DAI J , XU F , CHEN Q F . Study on multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 723770. | |
| 8 | WU Y , WU S B , HU X T . Multi-constrained cooperative path planning of multiple drones for persistent surveillance in urban environments[J]. Complex & Intelligent Systems, 2021, 7, 1633- 1647. |
| 9 |
WU Y , WU S B , HU X T . Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments[J]. IEEE Internet of Things Journal, 2021, 8 (6): 4906- 4919.
doi: 10.1109/JIOT.2020.3030240 |
| 10 |
YU H , MEIER K , ARGYLE M , et al. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles[J]. IEEE Trans.on Mechatronics, 2015, 20 (2): 541- 552.
doi: 10.1109/TMECH.2014.2301459 |
| 11 | 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39 (9): 1998- 2011. |
| LIU C , GAO X G , FU X W . Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. Systems Engineering and Electronics, 2017, 39 (9): 1998- 2011. | |
| 12 | 肖东, 江驹, 周俊, 等. 通信受限下多无人机协同运动目标搜索[J]. 哈尔滨工程大学学报, 2018, 39 (11): 1823- 1829. |
| XIAO D , JIANG J , ZHOU J , et al. Multi-UAV cooperation search for moving targets under limited communication[J]. Journal of Harbin Engineering University, 2018, 39 (11): 1823- 1829. | |
| 13 | TANG Q R , YU F C , ZHANG Y , et al. A stigmergetic method based on vector pheromone for target search with swarm robots[J]. Journal of Experimental & Theoretical Artificial Intelligence, 2019, 32 (3): 533- 555. |
| 14 | 黄杰, 孙伟, 高渝. 双属性概率图优化的无人机集群协同目标搜索[J]. 系统工程与电子技术, 2020, 42 (1): 118- 127. |
| HUANG J , SUN W , GAO Y . Cooperative searching for the multi-UAVs based on dual-attribute probability model optimization[J]. Systems Engineering and Electronics, 2020, 42 (1): 118- 127. | |
| 15 |
LIU Z , GAO X G , FU X W . A cooperative search and coverage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18 (5): 1472.
doi: 10.3390/s18051472 |
| 16 |
YAO P , WANG H L , JI H X . Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016, 55, 131- 143.
doi: 10.1016/j.ast.2016.05.016 |
| 17 |
CARABAZA S , BESADA P E , LPREZ O J , et al. Ant colony optimization for multi-UAV minimum time search in uncertain domains[J]. Applied Soft Computing, 2018, 62, 789- 806.
doi: 10.1016/j.asoc.2017.09.009 |
| 18 | PURBOLINGGA Y, JAZIDIE A, EFFENDI R. Modified ant colony algorithm for swarm multi agent exploration on target searching in unknown environment[C]//Proc. of the International Conference of Artificial Intelligence and Information Technology, 2019. DOI: 10.1109/ICAⅡT.2019.8834573. |
| 19 |
ZHEN Z Y , CHEN Y , WEN L D , et al. An intelligent coope-rative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 20 | YANG J , WANG X , BAUER P . Extended PSO based collaborative searching for robotic swarms with practical constraints[J]. IEEE Access, 2019, 7, 76328- 76341. |
| 21 | SAADAOUI H , BOUANANI F , ILLI E . Information sharing based on local PSO for UAVs cooperative search of moved targets[J]. IEEE Access, 2021, 9, 134998- 135011. |
| 22 | MEN T, LIU D Q, ZHU X, et al. Cooperative target search for UAVs in urban environment[C]//Proc. of the IEEE International Conference on Smart City and Informatization, 2021. DOI: 10.1109/ISCI53438.2021.00011. |
| 23 | JUANG C F , YEH Y T . Multi-objective evolution of biped robot gaits using advanced continuous ant-colon optimized recurrent neural networks[J]. IEEE Trans.on Cybernetics, 2018, 48 (6): 1910- 1922. |
| 24 | LIU D Q, BAO W D, FEI B W, et al. Multi-UAV cooperative obstacle avoidance and surveillance in intelligent transportation[C]// Proc. of the IEEE 20th International on Trust, Security and Privacy in Computing and Communcations, 2021. |
| 25 | LI J , XIONG Y H , SHE J H , et al. A path planning method for sweep coverage with multiple UAVs[J]. IEEE Internet of Things Journal, 2020, 7 (9): 8967- 8978. |
| 26 | BO N, LI X M, DAI J J, et al. A hierarchical optimization strategy of trajectory planning for multi-UAVs[C]//Proc. of the 9th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2017: 294-298. |
| 27 | XUE J K , SHEN B . A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8 (1): 22- 34. |
| 28 | FEI B W , BAO W D , ZHU X M , et al. Autonomous cooperative search model for multi-UAV with limited communication network[J]. IEEE Internet of Things Journal, 2022, 9 (19): 19346- 19361. |
| 29 | KASHINO Z , NEJAT G , BENHABIB B . A hybrid strategy for target search using static and mobile sensors[J]. IEEE Trans.on Cybernetics, 2020, 50 (2): 856- 868. |
| 30 | YUE W , XI Y , GUAN X H . A new searching approach using improved multi-ant colony scheme for multi-UAVs in unknown environments[J]. IEEE Access, 2019, 7, 161094- 161102. |
| 31 | HU X X , LIU Y H , WANG G Q . Optimal search for moving targets with sensing capabilities using multiple UAVs[J]. Journal of Systems Engineering and Electronics, 2017, 28 (3): 526- 535. |
| [1] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [2] | 杨少龙, 黄金, 向先波, 李伟超. 基于置信椭圆的无人艇区域覆盖搜寻规划优化[J]. 系统工程与电子技术, 2022, 44(7): 2263-2269. |
| [3] | 朱晓敏, 刘大千, 费博雯, 门通. 局部通信条件下多无人机协同搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3783-3791. |
| [4] | 杜津铭, 吴云华, 陈志明, 华冰, 许心怡, 朱翼, 岳程斐. 海上动态目标潜在区域博弈预测及搜索方法[J]. 系统工程与电子技术, 2021, 43(9): 2508-2515. |
| [5] | 庞强伟, 胡永江, 李文广. 基于垂直区域宽度分解的无人机覆盖航迹规划[J]. 系统工程与电子技术, 2019, 41(11): 2550-2558. |
| [6] | 李娟, 张秉健, 杨莉娟, 王蒙迪. 未知环境下基于感知自适应的多AUV目标搜索算法[J]. 系统工程与电子技术, 2018, 40(8): 1839-1845. |
| [7] | 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39(9): 1998-2011. |
| [8] | 周文宏, 雷欣, 姜建国, 周佳薇. 变概率混合细菌觅食优化算法[J]. 系统工程与电子技术, 2016, 38(4): 960-964. |
| [9] | 李小涛,胡晓惠,郭晓利,卢卫娜. 基于元数据的复杂信息共享技术[J]. 系统工程与电子技术, 2015, 37(3): 700-706. |
| [10] | 万明, 代忠, 褚文奎. 无人机扫描线区域覆盖中的转弯航迹规划[J]. 系统工程与电子技术, 2014, 36(9): 1750-1754. |
| [11] | 王强, 丁全心, 张安, 齐玲辉. 多机协同对地攻击目标分配算法[J]. Journal of Systems Engineering and Electronics, 2012, 34(7): 1400-1405. |
| [12] | 高翔, 王宏柯, 王治军, 裴璐. 基于多Agent的多机协同空战仿真系统设计和实现[J]. Journal of Systems Engineering and Electronics, 2010, 32(4): 807-811. |
| [13] | 彭辉,苏菲,沈林成. 用于多无人机广域目标搜索的扩展搜索图方法[J]. Journal of Systems Engineering and Electronics, 2010, 32(4): 795-798. |
| [14] | 杨道箭, 齐二石. 供应链竞争下的产品差异性与信息共享[J]. Journal of Systems Engineering and Electronics, 2009, 31(9): 2141-2145. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||