
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (5): 1451-1464.doi: 10.12305/j.issn.1001-506X.2026.05.01
王媛1,2( ), 刘晓东1,3,4,*(), 王舒文1,3
), 刘晓东1,3,4,*(), 王舒文1,3
收稿日期:2025-03-04
出版日期:2026-05-27
发布日期:2026-05-27
通讯作者:
刘晓东
E-mail:wangyuan18@mails.ucas.ac.cn;liuxd@mail.ioa.ac.cn
作者简介:王 媛(1994—),女,博士研究生,主要研究方向为水声信号处理
Yuan WANG1,2(), Xiaodong LIU1,3,4,*(), Shuwen WANG1,3
Received:2025-03-04
Online:2026-05-27
Published:2026-05-27
Contact:
Xiaodong LIU
E-mail:wangyuan18@mails.ucas.ac.cn;liuxd@mail.ioa.ac.cn
摘要:
针对走航期间气体泄漏或鱼群等变化较快的水体目标不能快速实时成像的问题,提出一种基于深水多波束测深仪(multibeam echosounder, MBES)的探测和重建方法,利用深水MBES多扇区发射的特点,增强水体实时成像能力。首先通过角度解算对目标区域的三维散射点进行归位实现实时探测,随后通过基于水体反向散射强度改进的大津阈值分割算法和基于牛顿-拉夫逊优化的基于密度带有噪声的空间聚类算法对目标点云进行重建,得到更为清晰的目标图像。所提算法通过仿真实验进行了验证,并对海试数据处理得到清晰的海底气柱图像,验证了所提算法的有效性。
中图分类号:
王媛, 刘晓东, 王舒文. 基于深水MBES的快速运动目标的探测与重建方法[J]. 系统工程与电子技术, 2026, 48(5): 1451-1464.
Yuan WANG, Xiaodong LIU, Shuwen WANG. Detection and reconstruction method of fast-moving targets based on deep-water MBES[J]. Systems Engineering and Electronics, 2026, 48(5): 1451-1464.

图1
基于深水MBES的快速运动目标探测与重建流程图"
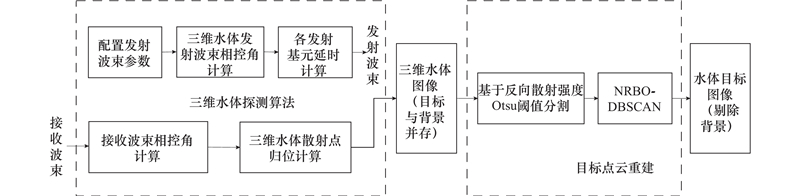
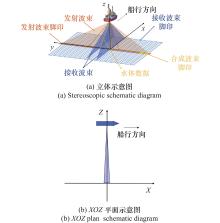
图2
传统MBES成像示意图"
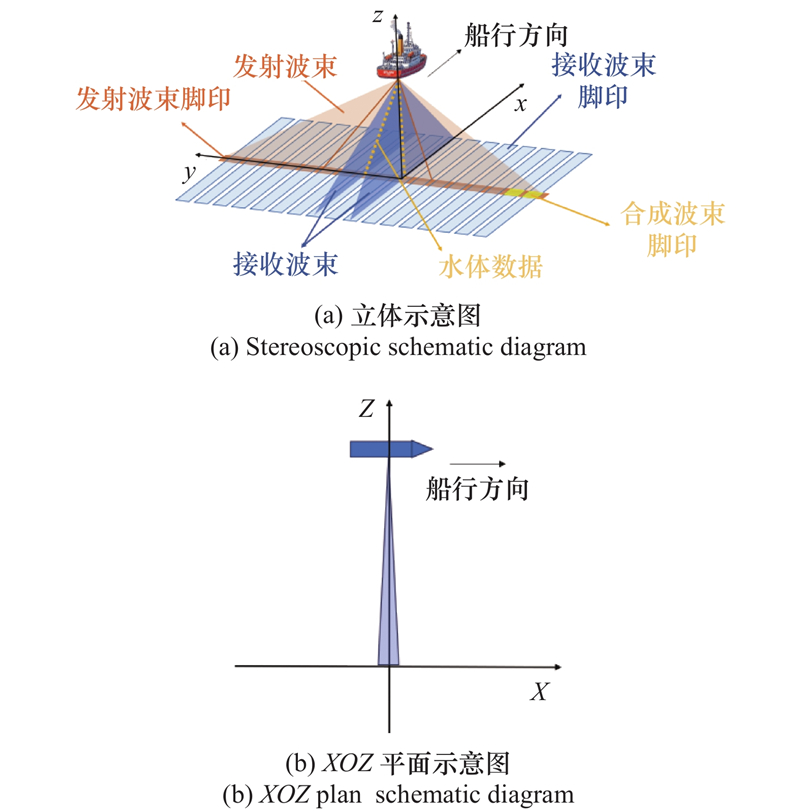
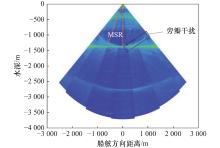
图3
传统MBES水体图"
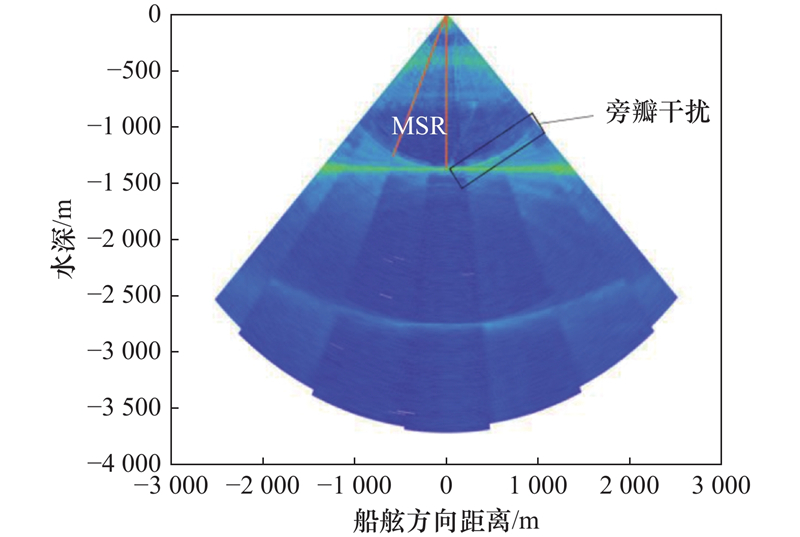
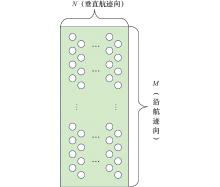
图4
基元交错排列的发射平面阵列"
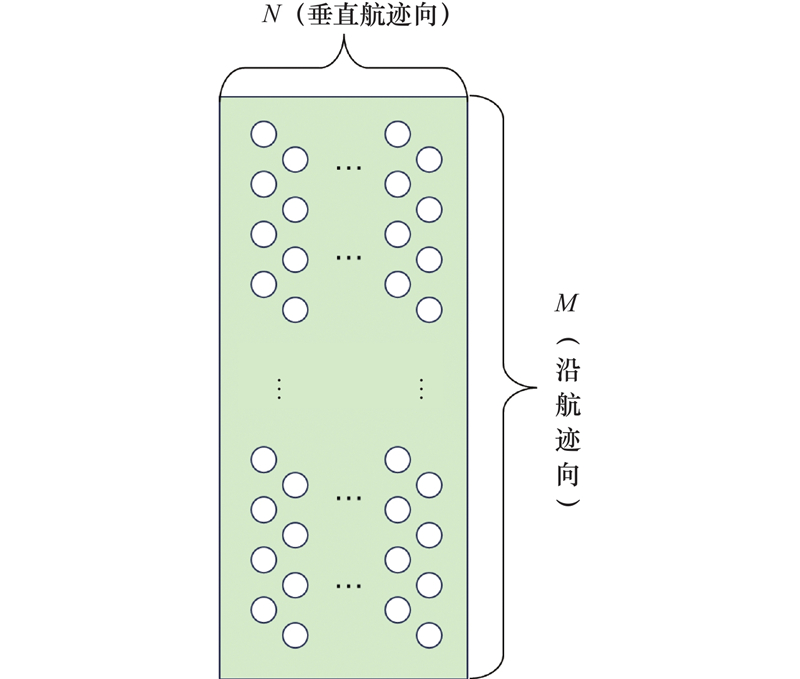
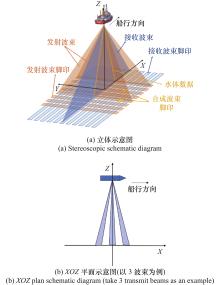
图5
3D-WCD成像示意图"
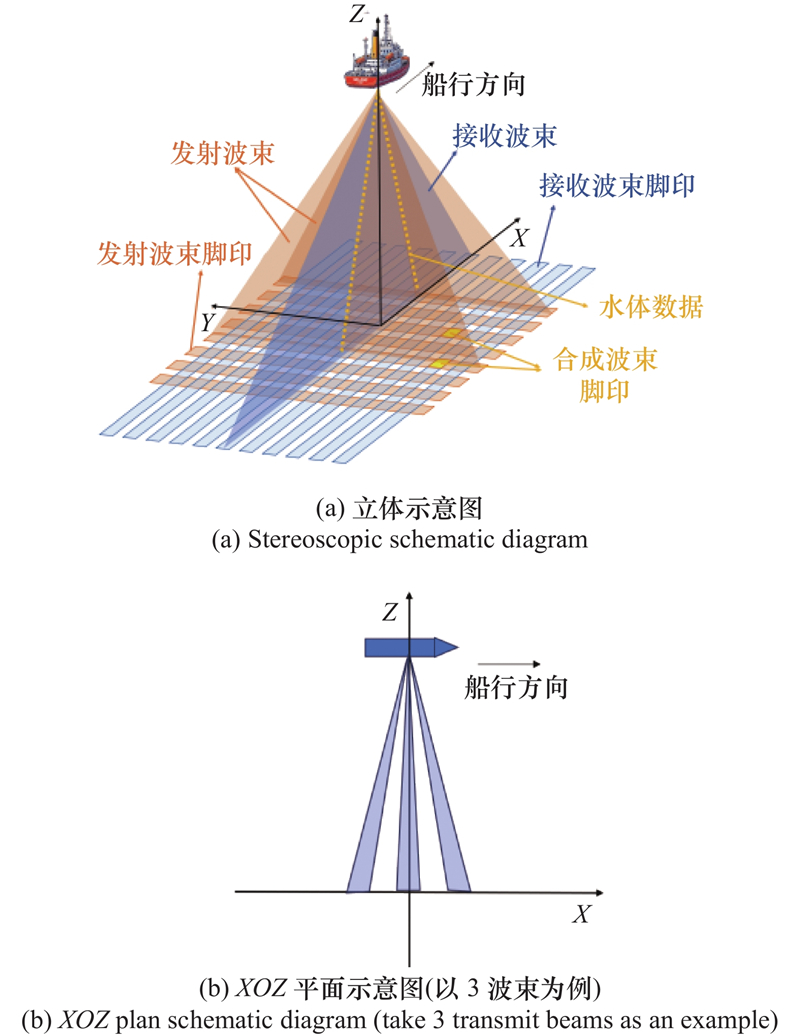
图6
传统MBES、3D-WCD算法沿航迹向间隔"
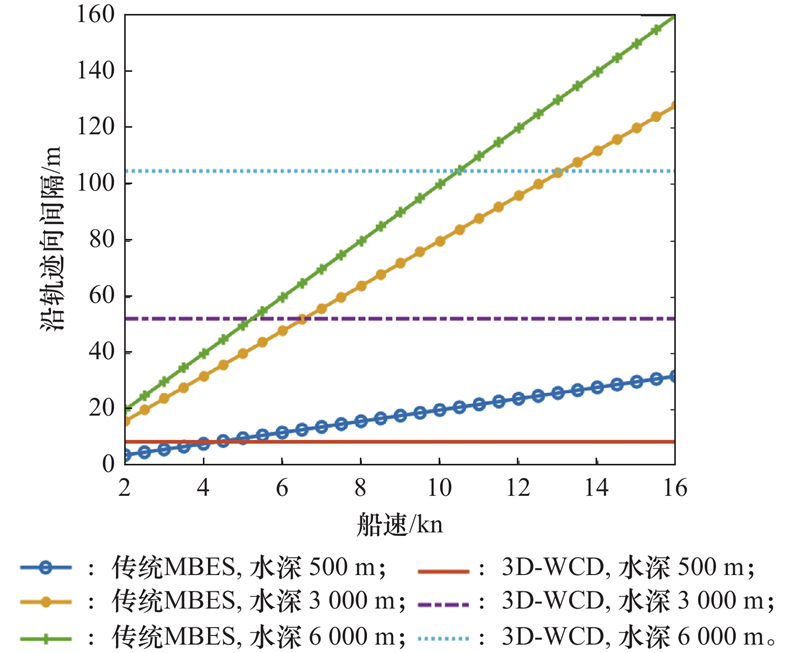
图7
传统MBES、3D-WCD探测用时"
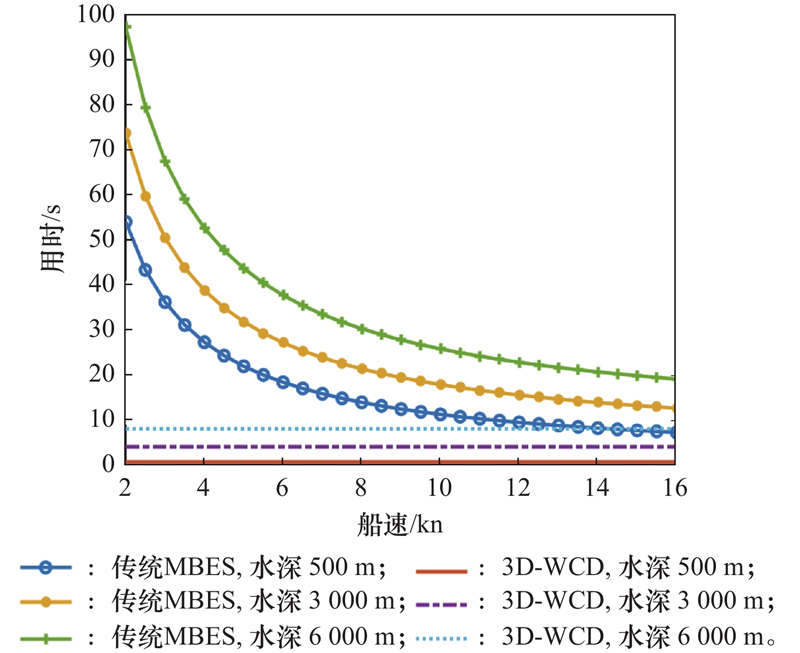

图8
线阵方向图"
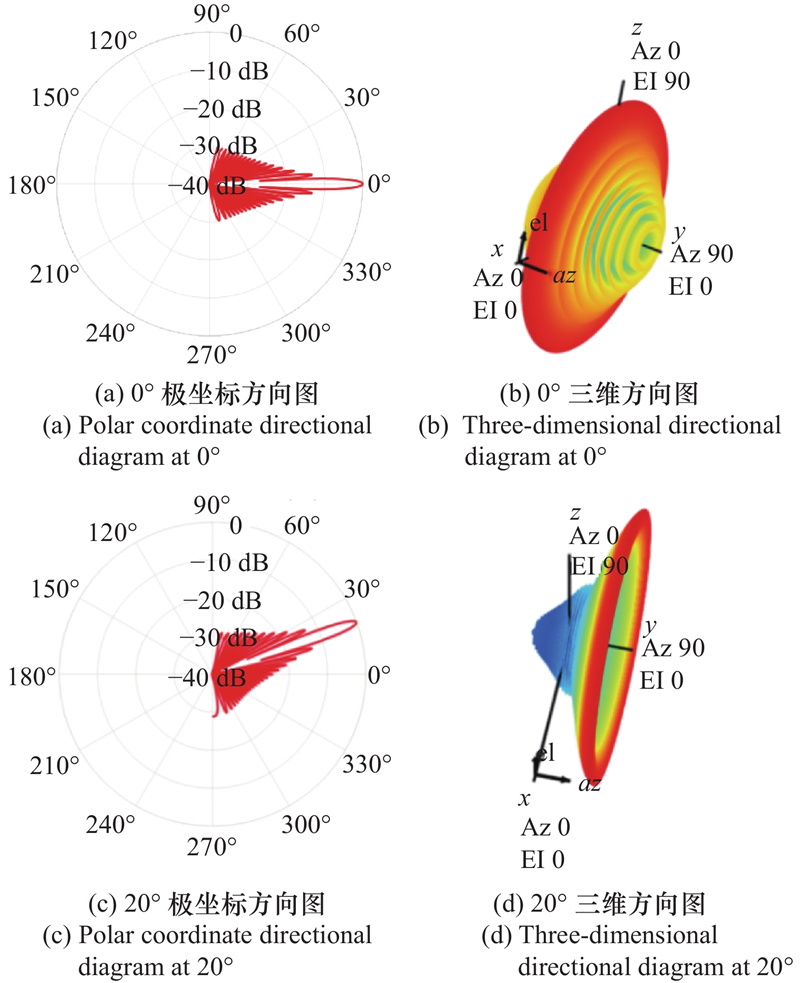
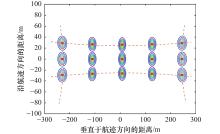
图9
合成波束脚印($\gamma = \left[ { - {3^ \circ },{0^ \circ },{3^ \circ }} \right]$,$\eta = {0^ \circ }$)"
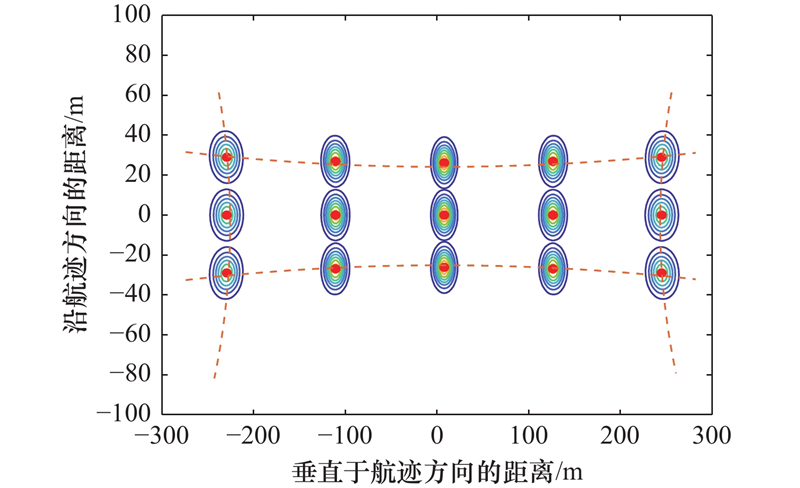
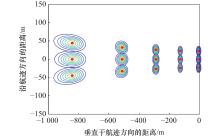
图10
合成波束脚印($\gamma = \left[ { - {3^ \circ },{0^ \circ },{3^ \circ }} \right]$,$\eta = {30^ \circ }$)"
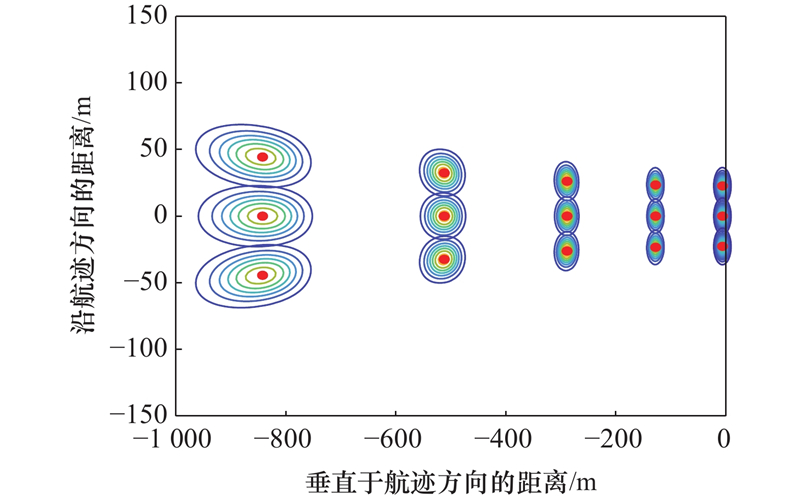
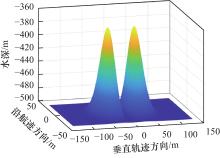
图11
海底气柱仿真"
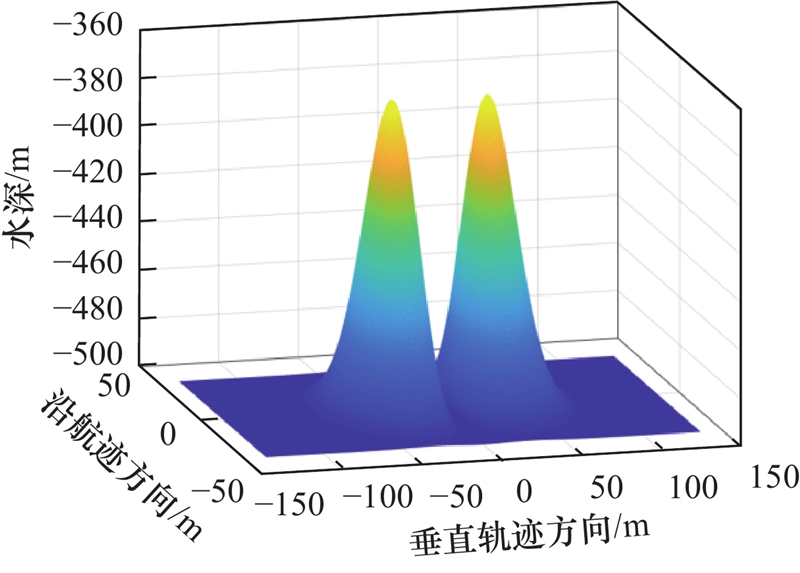
表1
仿真参数设置"
| 仿真参数 | 传统MBES | 本文算法 |
| 水深/m | 500 | 500 |
| 声速/(m/s) | 1 500 | 1 500 |
| 船速/ kn | 8 | — |
| 发射波束数/个 | 3 | 7 |
| 接收波束数/个 | 513 | 129 |
| 发射波束角度/(°) | ||
| 信噪比/dB | 20 | 20 |
| 发射波束开角/(°) | 16 | 50 |
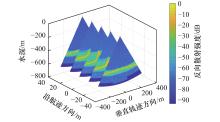
图12
仿真海底气柱水体成像图(传统MBES)"
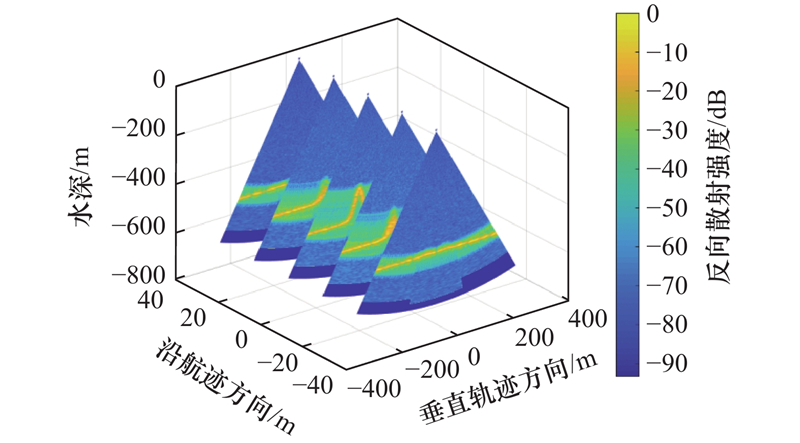
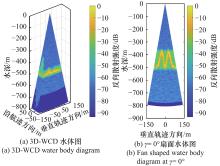
图13
仿真海底气柱水体成像图(本文算法)"
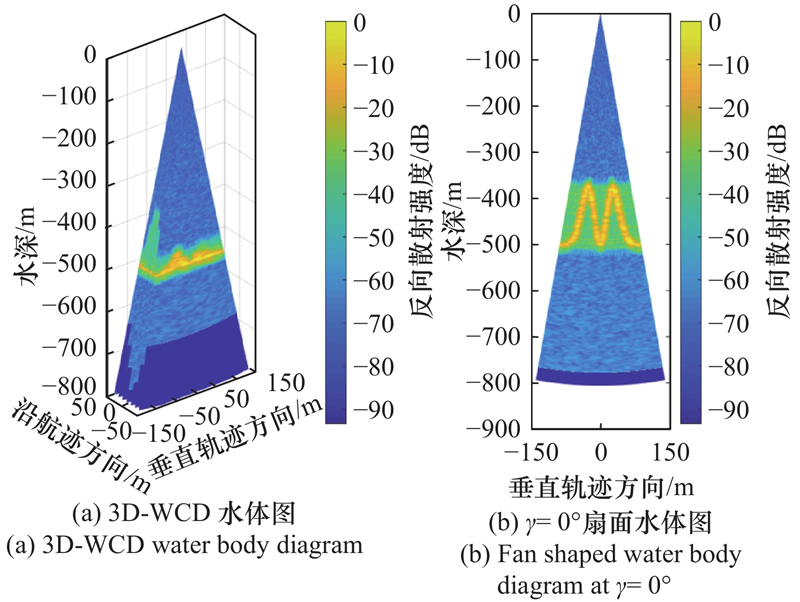
图14
Otsu阈值分割后海底气柱水体成像图(传统MBES)"
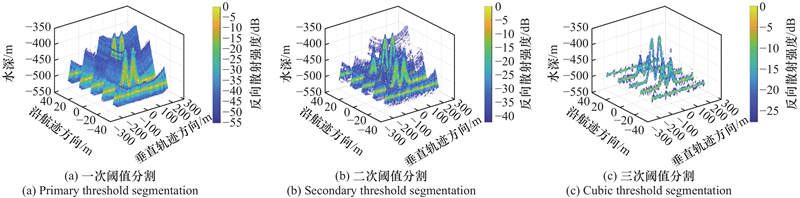

图15
Otsu阈值分割后海底气柱水体成像图(本文算法)"
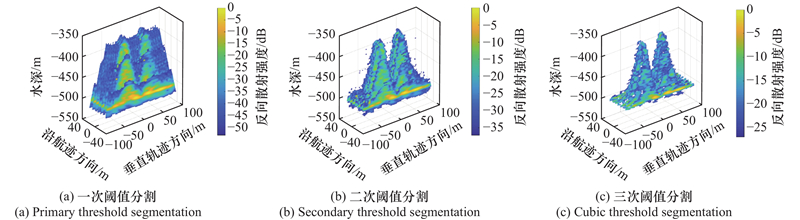
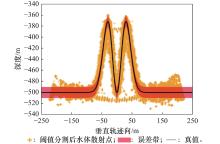
图16
阈值分割后与真值对比图(传统MBES)"
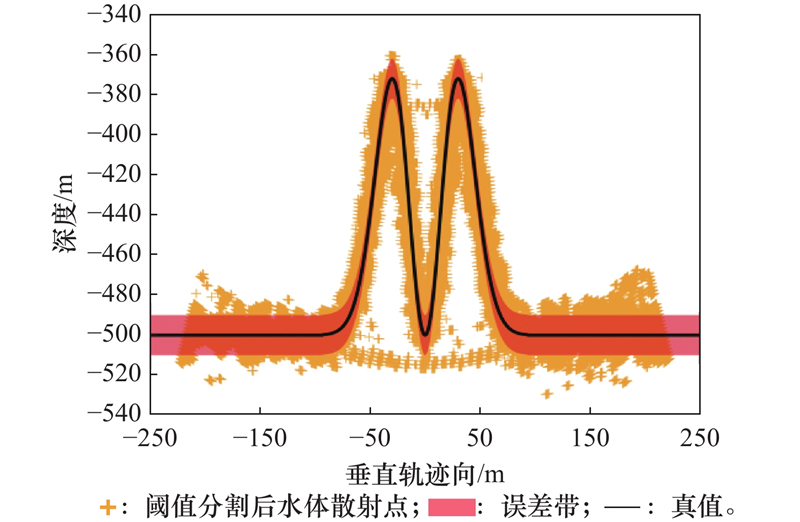
图17
阈值分割后与真值对比图(本文算法)"
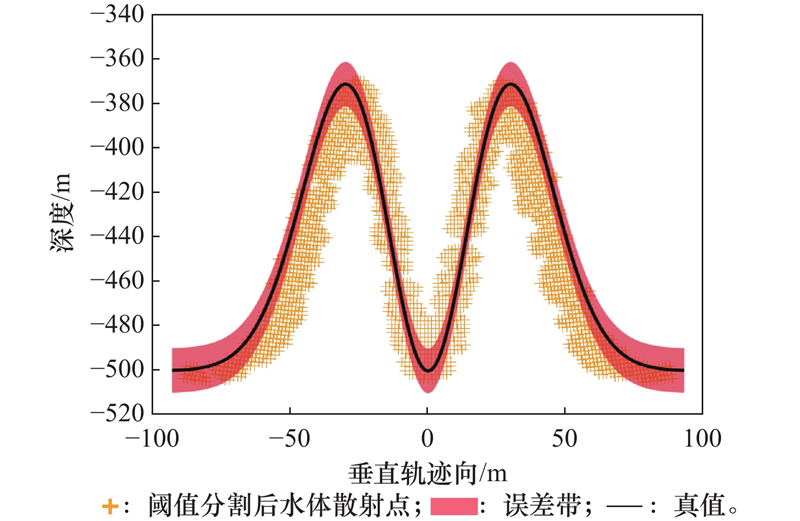
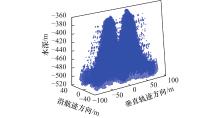
图18
二次迭代Otsu阈值分割散点图(本文算法)"
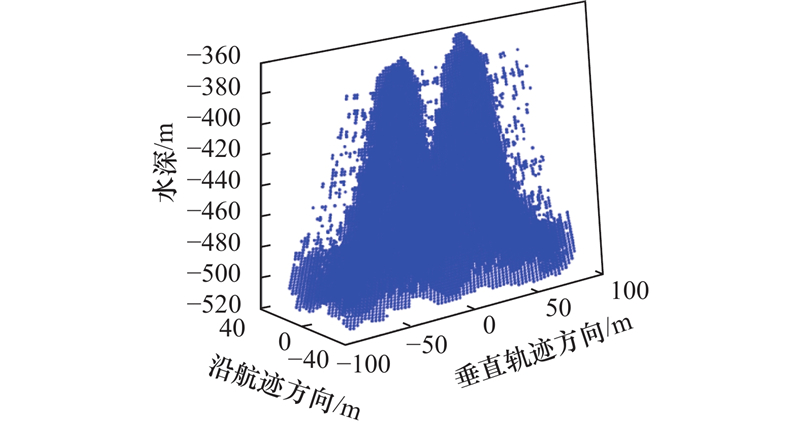
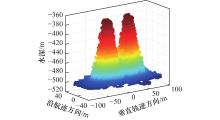
图19
NRBO-DBSCAN聚类后仿真气柱成像图"
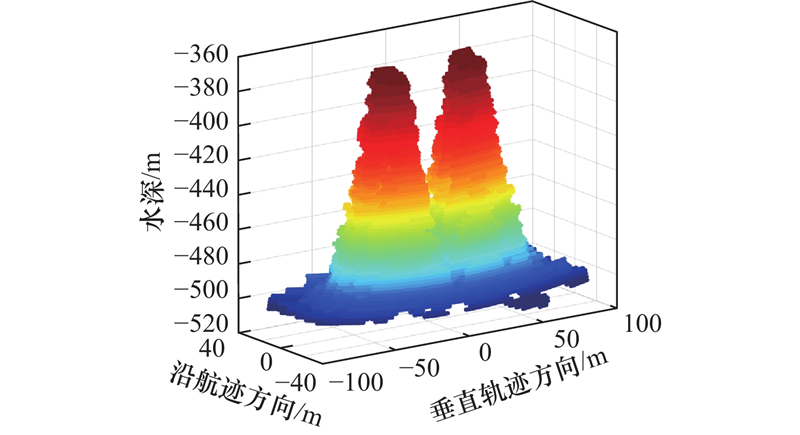

图20
海试气柱水体图"
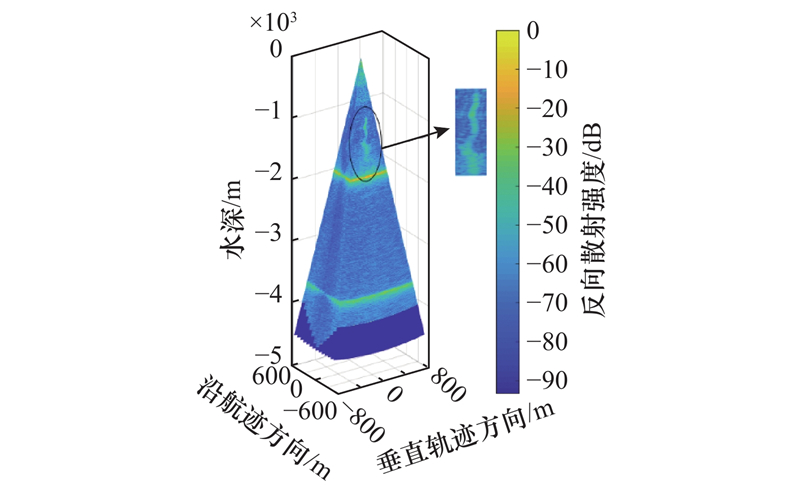
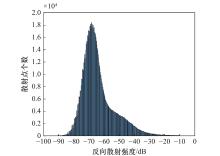
图21
有气柱水体反向散射强度直方图"
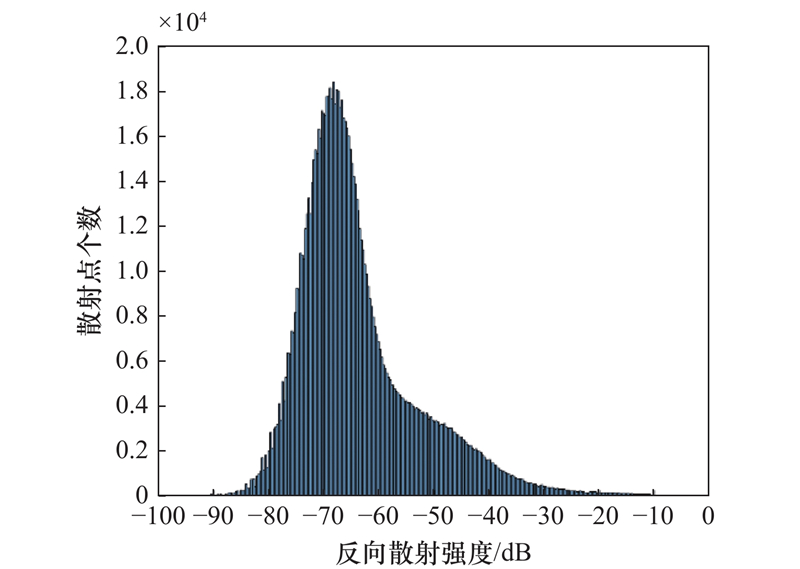

图22
Otsu阈值分割后海试气柱水体成像"
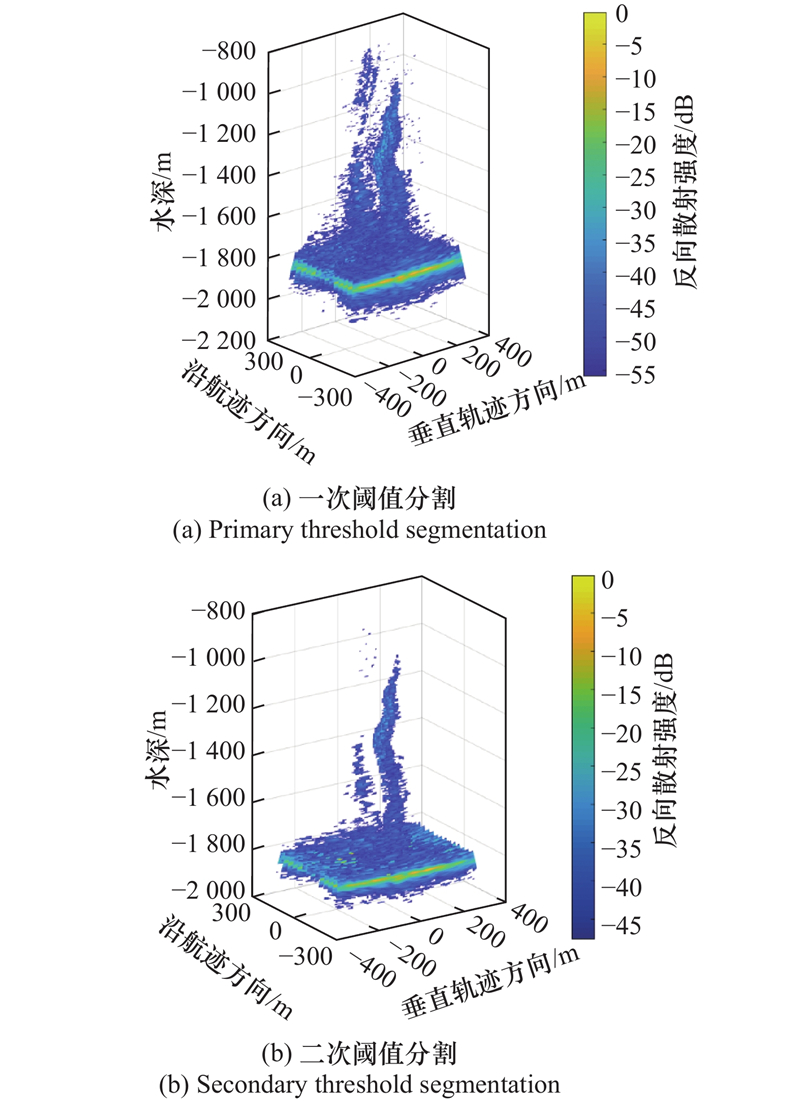
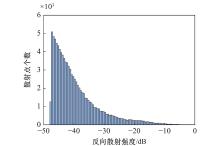
图23
Otsu阈值分割后含气柱水体反向散射强度直方图"
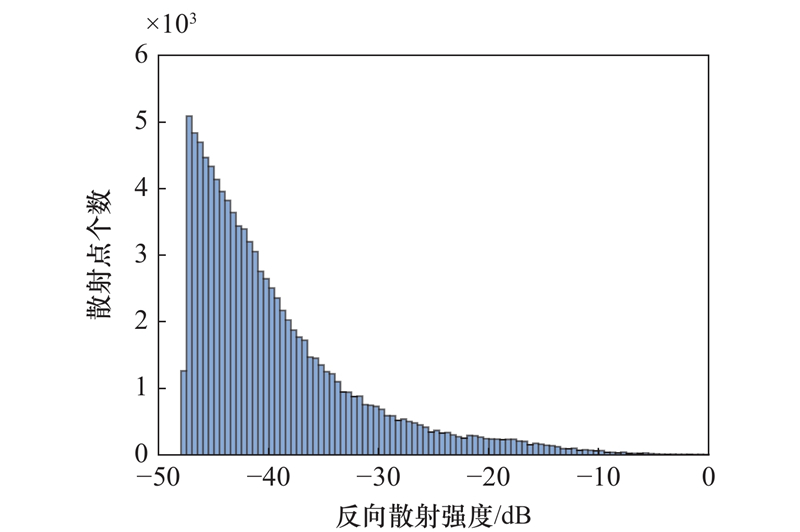
图24
NRBO-DBSCAN聚类后气柱水体成像"
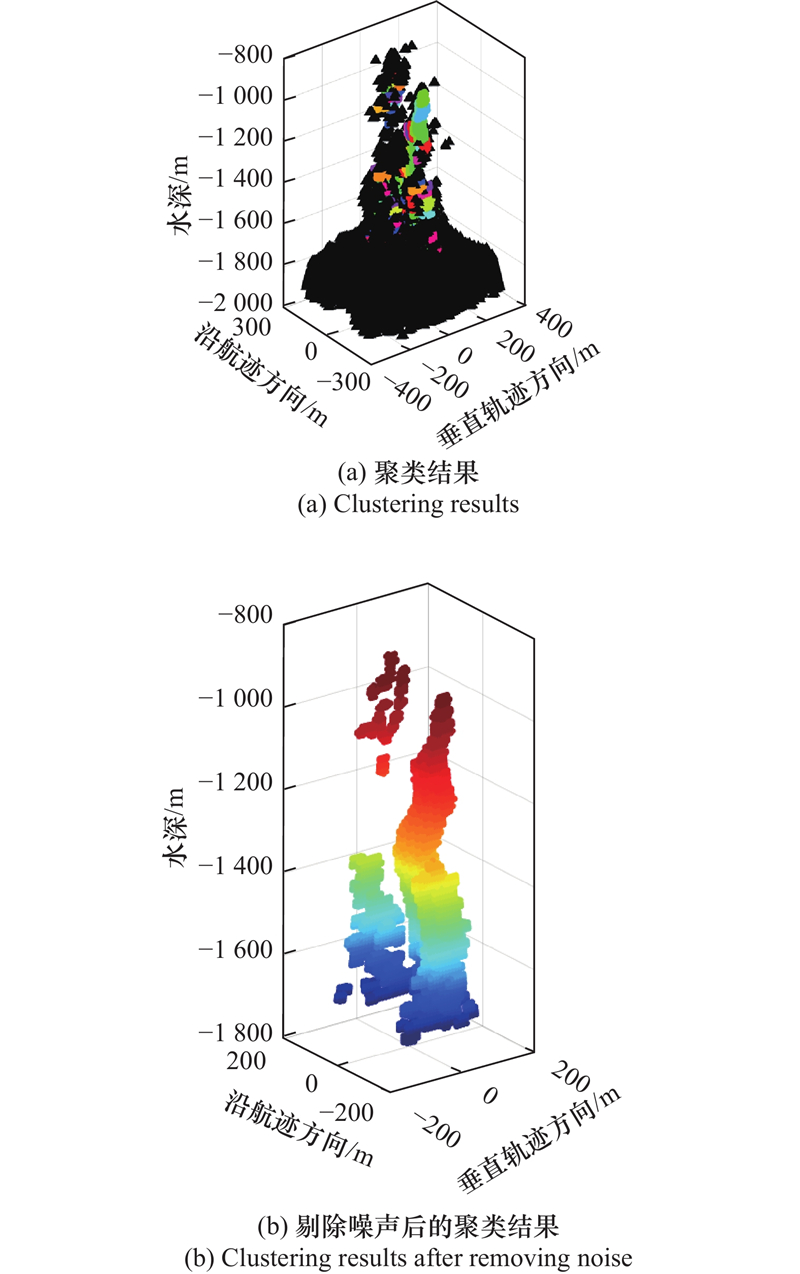
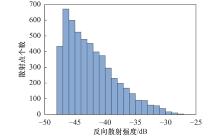
图25
NRBO-DBSCAN聚类后含气柱水体反向散射强度直方图"
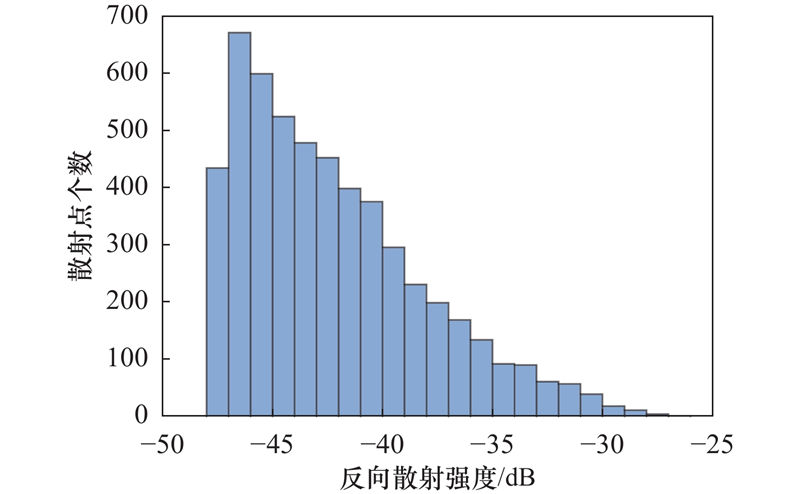
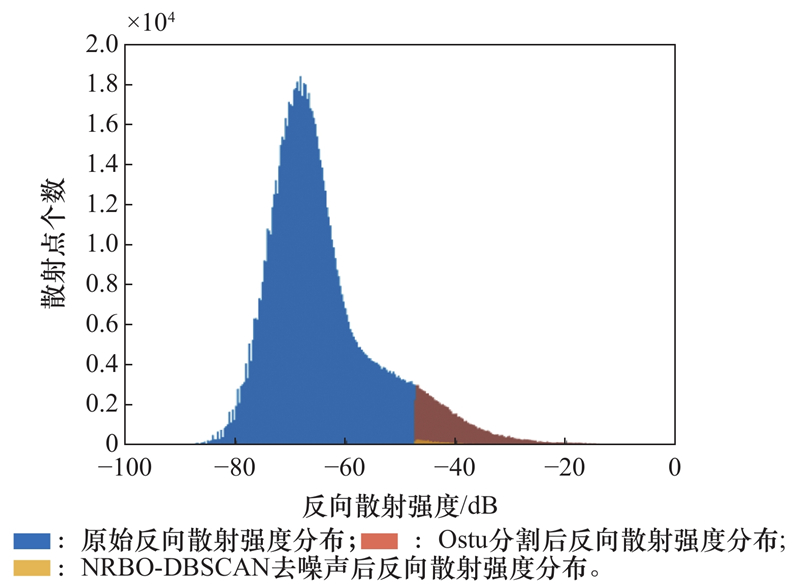
图26
处理前后含气柱水体反向散射强度直方图对比"
| 1 |
梅赛, 杨慧良, 孙治雷, 等. 冷泉羽状流多波束水体声学探测技术与应用[J]. 海洋地质与第四纪地质, 2021, 41 (4): 222- 231.
doi: 10.16562/j.cnki.0256-1492.2020082401 |
|
MEI S, YANG H L, SUN Z L, et al. Acostic detecting technology based on multibeam water column imaging and its application to cold seep plume[J]. Marine Geology & Quaternary Geology, 2021, 41 (4): 222- 231.
doi: 10.16562/j.cnki.0256-1492.2020082401 |
|
| 2 | PHILIP B T, DENNY A R, SOLOMON E A, et al. Time-series measurements of bubble plume variability and water column methane distribution above Southern Hydrate Ridge, Oregon[J]. Geochemistry, Geophysics, Geosystems, 2016, 17 (3): 1182- 1196. |
| 3 |
MIMURA K, NAKAMURA K, TAKAO K, et al. Automated detection of hydrothermal emission signatures from multibeam echo sounder images using deep learning[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16, 2703- 2710.
doi: 10.1109/JSTARS.2023.3247467 |
| 4 | 张万远. 基于多波束测深声呐的泄漏气体检测与量化技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2023. |
| ZHANG W Y. Research on detection and quantification technology of leakage gas based on multi-beam bathymetry sonar[D]. Harbin: Harbin Engineering University, 2023. | |
| 5 |
TANG Y L, WANG L M, JIN S H, et al. AUV-based side-scan sonar real-time method for underwater-target detection[J]. Journal of Marine Science and Engineering, 2023, 11 (4): 690.
doi: 10.3390/jmse11040690 |
| 6 |
MARSTON T M, HALL B R, BASSETT C, et al. Motion tracking of fish and bubble clouds in synthetic aperture sonar data[J]. The Journal of the Acoustical Society of America, 2024, 155 (3): 2181- 2191.
doi: 10.1121/10.0025384 |
| 7 | PARNUM I, SIWABESSY J, GAVRILOV A, et al. A comparison of single beam and multibeam sonar systems in seafloor habitat mapping[C]//Proc. of the 3rd International Conference and Exhibition of Underwater Acoustic Measurements: Technologies & Results, 2009: 155−162. |
| 8 |
DUNLOP K M, JARVIS T, BENOIT-BIRD K J, et al. Detection and characterisation of deep-sea benthopelagic animals from an autonomous underwater vehicle with a multibeam echosounder: a proof of concept and description of data-processing methods[J]. Deep Sea Research Part I: Oceanographic Research Papers, 2018, 134, 64- 79.
doi: 10.1016/j.dsr.2018.01.006 |
| 9 |
LI Z X, PENG Z T, ZHANG Z, et al. Exploring modern bathymetry: a comprehensive review of data acquisition devices, model accuracy, and interpolation techniques for enhanced underwater mapping[J]. Frontiers in Marine Science, 2023, 10, 1178845.
doi: 10.3389/fmars.2023.1178845 |
| 10 | TENG Y T. Sector-specific beam pattern compensation for multi-sector and multi-swath multibeam sonars[D]. Fredericton: University of New Brunswick, 2011. |
| 11 |
BORRELLI M, SMITH T L, MAGUE S T. Vessel-based, shallow water mapping with a phase-measuring sidescan sonar[J]. Estuaries and Coasts, 2022, 45 (4): 961- 979.
doi: 10.1007/s12237-021-00979-2 |
| 12 |
BROWN C J, BLONDEL P. Developments in the application of multibeam sonar backscatter for seafloor habitat mapping[J]. Applied Acoustics, 2009, 70 (10): 1242- 1247.
doi: 10.1016/j.apacoust.2008.08.004 |
| 13 |
COLBO K, ROSS T, BROWN C, et al. A review of oceanographic applications of water column data from multibeam echosounders[J]. Estuarine, Coastal and Shelf Science, 2014, 145, 41- 56.
doi: 10.1016/j.ecss.2014.04.002 |
| 14 |
NAU A W, SCOULDING B, KLOSER R J, et al. Extended detection of shallow water gas seeps from multibeam echosounder water column data[J]. Frontiers in Remote Sensing, 2022, 3, 839417.
doi: 10.3389/frsen.2022.839417 |
| 15 |
KRISTMUNDSSON J, PATURSSON Ø, POTTER J, et al. Fish monitoring in aquaculture using multibeam echosounders and machine learning[J]. IEEE Access, 2023, 11, 108306- 108316.
doi: 10.1109/ACCESS.2023.3320949 |
| 16 |
VON-DEIMLING J S, GREINERT J, CHAPMAN N R, et al. Acoustic imaging of natural gas seepage in the north sea: sensing bubbles controlled by variable currents[J]. Limnology and Oceanography: Methods, 2010, 8 (5): 155- 171.
doi: 10.4319/lom.2010.8.155 |
| 17 |
魏玉阔, 陈宝伟, 李海森. 利用MVDR算法削弱多波束测深声纳的隧道效应[J]. 海洋测绘, 2011, 31 (1): 28- 31.
doi: 10.3969/j.issn.1671-3044.2011.01.008 |
|
WEI Y K, CHEN B W, LI H S. Tunnel effect elimination in multibeam bathymetry sonar based on MVDR algorithm[J]. Hydrographic Surveying and Charting, 2011, 31 (1): 28- 31.
doi: 10.3969/j.issn.1671-3044.2011.01.008 |
|
| 18 |
权永峥, 冯秀丽, 丁咚, 等. 多波束水体数据中旁瓣干扰处理方法研究[J]. 中国海洋大学学报(自然科学版), 2019, 49 (7): 64- 70.
doi: 10.16441/j.cnki.hdxb.20180206 |
|
QUAN Y Z, FENG X L, DING D, et al. A study on process sidelobe in multibeams water column data[J]. Periodical of Ocean University of China, 2019, 49 (7): 64- 70.
doi: 10.16441/j.cnki.hdxb.20180206 |
|
| 19 | YUAN X, MARTíNEZ J F, ECKERT M, et al. An improved Otsu threshold segmentation method for underwater simultaneous localization and mapping-based navigation[J]. Sensors, 2016, 16 (7): 1148. |
| . [J]. 2016, 16 (7): 1148. | |
| 20 |
PUN T. A new method for grey-level picture thresholding using the entropy of the histogram[J]. Signal Processing, 1980, 2 (3): 223- 237.
doi: 10.1016/0165-1684(80)90020-1 |
| 21 |
PUN T. Entropic thresholding: a new approach[J]. Computer Graphics and Image Processing, 1981, 16 (3): 210- 239.
doi: 10.1016/0146-664X(81)90038-1 |
| 22 | ZHENG L P, LI G Y, BAO Y. Improvement of grayscale image 2D maximum entropy threshold segmentation method[C]//Proc. of the International Conference on Logistics Systems and Intelligent Management, 2010: 324−328. |
| 23 |
LIU J, ZHENG J H, TANG Q T, et al. Minimum error thresholding segmentation algorithm based on 3D grayscale histogram[J]. Mathematical Problems in Engineering, 2014, 2014 (1): 932695.
doi: 10.1155/2014/932695 |
| 24 |
TRIER O D, JAIN A K. Goal-directed evaluation of binarization methods[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 1995, 17 (12): 1191- 1201.
doi: 10.1109/34.476511 |
| 25 |
OTSU N. A threshold selection method from gray-level histograms[J]. IEEE Trans. on Systems, Man, and Cybernetics, 1979, 9 (1): 62- 66.
doi: 10.1109/TSMC.1979.4310076 |
| 26 |
FENG Y C, ZHAO H Y, LI X F, et al. A multi-scale 3D Otsu thresholding algorithm for medical image segmentation[J]. Digital Signal Processing, 2017, 60, 186- 199.
doi: 10.1016/j.dsp.2016.08.003 |
| 27 |
FENG Y Y, ZHAO S S, LIU H. Analysis of network coverage optimization based on feedback K-means clustering and artificial fish swarm algorithm[J]. IEEE Access, 2020, 8, 42864- 42876.
doi: 10.1109/ACCESS.2020.2970208 |
| 28 |
MINELLI A, TASSETTI A N, HUTTON B, et al. Semi-automated data processing and semi-supervised machine learning for the detection and classification of water-column fish schools and gas seeps with a multibeam echosounder[J]. Sensors, 2021, 21 (9): 2999.
doi: 10.3390/s21092999 |
| 29 | 夏晓云. 对海探测场景分割与海杂波特性参数预测方法研究 [D]. 西安: 西安电子科技大学, 2023. |
| XIA X Y. Research on the segmentation of maritime surveillance scenes and the prediction of sea clutter characteristics parameters[D]. Xi’an: Xidian University, 2023. | |
| 30 | DENG D. DBSCAN clustering algorithm based on density[C]//Proc. of the 7th International Forum on Electrical Engineering and Automation, 2020: 949−953. |
| 31 | ESTER M, KRIEGEL H P, SANDER J, et al. A density-based algorithm for discovering clusters in large spatial databases with noise[C]//Proc. of the 2nd International Conference on Knowledge Discovery and Data Mining, 1996: 226−231. |
| 32 |
KARAMI A, JOHANSSON R. Choosing DBSCAN parameters automatically using differential evolution[J]. International Journal of Computer Applications, 2014, 91 (7): 6420287.
doi: 10.5120/15890-5059 |
| 33 | FAN C C, WANG Z X, ZHANG J, et al. Meta-heuristic algorithms for influence maximization: a survey[J]. Evolving Systems, 2024, 16 (1): 636- 647. |
| 34 |
DORIGO M, BIRATTARI M, STUTZLE T. Ant colony optimization[J]. IEEE Computational Intelligence Magazine, 2006, 1 (4): 28- 39.
doi: 10.1109/MCI.2006.329691 |
| 35 | KENNEDY J, EBERHART R. Particle swarm optimization[C]//Proc. of the International Conference on Neural Networks, 1995: 1942−1948. |
| 36 |
MIRJALILI S, MIRJALILI S M, LEWIS A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69, 46- 61.
doi: 10.1016/j.advengsoft.2013.12.007 |
| 37 | YANG X S, DEB S. Cuckoo search: recent advances and applications[J]. Neural Computing and Applications, 2014, 24, 169- 174. |
| 38 |
LI S M, CHEN H L, WANG M J, et al. Slime mould algorithm: a new method for stochastic optimization[J]. Future Generation Computer Systems, 2020, 111, 300- 323.
doi: 10.1016/j.future.2020.03.055 |
| 39 |
SOWMYA R, PREMKUMAR M, JANGIR P. Newton-Raphson-based optimizer: a new population-based metaheuristic algorithm for continuous optimization problems[J]. Engineering Applications of Artificial Intelligence, 2024, 128, 107532.
doi: 10.1016/j.engappai.2023.107532 |
| 40 |
杨卓, 刘彤, 刘永辉, 等. 多波束测深系统在沉管隧道水下地形测量中的应用研究[J]. 广州建筑, 2023, 51 (4): 97- 101.
doi: 10.3969/j.issn.1671-2439.2023.04.025 |
|
YANG Z, LIU T, LIU Y H, et al. Research on application of multi-beam sounding system in underwater topographic survey of immersed tube tunnel[J]. Guangzhou Architecture, 2023, 51 (4): 97- 101.
doi: 10.3969/j.issn.1671-2439.2023.04.025 |
|
| 41 |
ZHAO J H, MENG J X, ZHANG H M, et al. Comprehensive detection of gas plumes from multibeam water column images with minimisation of noise interferences[J]. Sensors, 2017, 17 (12): 2755.
doi: 10.3390/s17122755 |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||