
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (2): 675-683.doi: 10.12305/j.issn.1001-506X.2024.02.31
• 制导、导航与控制 • 上一篇
鲁其兴1, 汤新民2,*, 周杨1
收稿日期:2022-11-28
出版日期:2024-01-25
发布日期:2024-02-06
通讯作者:
汤新民
作者简介:鲁其兴(1991—), 男, 博士研究生, 主要研究方向为先进场面引导与控制系统基金资助:Qixing LU1, Xinmin TANG2,*, Yang ZHOU1
Received:2022-11-28
Online:2024-01-25
Published:2024-02-06
Contact:
Xinmin TANG
摘要:
为了解决“当前”统计模型由于固定机动频率及假定加速度极限值, 在复杂机场环境下机动目标跟踪性能降低的问题, 提出一种双变量自适应的“当前”统计模型滤波算法。首先, 利用加速度噪声一阶时间相关过程模型, 推算出实时在线调整的机动频率。然后, 根据位置状态估计值与加速度变化率, 通过运动学理论模型和位置滤波残差, 推导出实时在线更新的加速度方差, 从理论上实现了模型自适应更新。最后, 基于场面真实广播式自动相关监视(automatic dependent surveillance-broadcast, ADS-B)轨迹数据进行验证, 结果表明改进的“当前”统计模型能够在非等间隔预测的基础上实现自适应调参, 且在位置、速度和加速度上的轨迹拟合精度均得到了提高, 并在速度和加速度跟踪误差方面得到了收敛。
中图分类号:
鲁其兴, 汤新民, 周杨. 基于双变量自适应“当前”统计模型的场面4D轨迹跟踪预测[J]. 系统工程与电子技术, 2024, 46(2): 675-683.
Qixing LU, Xinmin TANG, Yang ZHOU. Airport surface 4D trajectory tracking prediction based on bivariate adaptive "current" statistical model[J]. Systems Engineering and Electronics, 2024, 46(2): 675-683.

图1
坐标转换流程图"

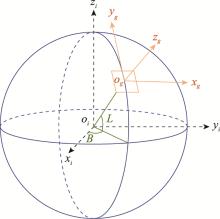
图2
地心坐标系和东北天坐标系"


图3
CS-AF、MCS-AF跟踪轨迹与航空器真实轨迹对比图"


图4
X方向轨迹跟踪效果对比曲线图"


图5
Y方向轨迹跟踪效果对比曲线图"


图6
直角坐标系位置跟踪误差对比曲线图"


图7
直角坐标系速度跟踪误差对比曲线图"


图8
直角坐标系加速度跟踪误差对比曲线图"

表1
双维度上位置、速度和加速度各项评判指标对比"
| 直角坐标双维度 | 位置/m | 速度/(m/s) | 加速度/(m/s2) | |
| RMSE | CS-AF | 7.682 2 | 1.643 1e+06 | 1.378 8e+05 |
| MCS-AF | 7.022 5 | 11.626 6 | 2.109 1 | |
| 精度提高 | 8.6% | 99.9% | 99.9% | |
| ${\rm{\bar E}}$ | CS-AF | 3.483 7 | 4.987 8e+05 | 4.174 6e+04 |
| MCS-AF | 3.111 2 | 7.822 5 | 1.061 8 | |
| 精度提高 | 10.7% | 99.9% | 99.9% | |
| σ | CS-AF | 6.853 8 | 1.567 1e+06 | 1.315 4e+05 |
| MCS-AF | 6.302 0 | 8.610 1 | 1.824 1 | |
| 精度提高 | 8.1% | 99.9% | 99.9% | |
| 最高点 | CS-AF | 99.548 6 | 1.272 8e+07 | 7.632 7e+05 |
| MCS-AF | 53.098 1 | 89.771 1 | 20.059 1 | |
| 精度提高 | 46.7% | 99.9% | 99.9% | |
表2
X方向上位置、速度和加速度各项评判指标对比"
| X方向 | 位置/m | 速度/(m/s) | 加速度/(m/s2) | |
| RMSE | CS-AF | 6.494 3 | 515.517 1 | 30.756 5 |
| MCS-AF | 6.477 9 | 7.974 9 | 2.042 2 | |
| 精度提高 | 0.3% | 98.5% | 93.4% | |
| ${\rm{\bar E}}$ | CS-AF | 2.917 3 | 96.015 6 | 7.657 6 |
| MCS-AF | 2.570 3 | 4.876 2 | 0.931 3 | |
| 精度提高 | 11.9% | 94.9% | 87.8% | |
| σ | CS-AF | 5.952 1 | 507.004 0 | 29.817 8 |
| MCS-AF | 5.807 9 | 6.316 7 | 1.819 2 | |
| 精度提高 | 2.4% | 98.8% | 93.9% | |
| 最高点 | CS-AF | 99.271 4 | 8.894 7e+03 | 498.009 0 |
| MCS-AF | 48.195 5 | 85.894 9 | 20.059 1 | |
| 精度提高 | 51.5% | 99.0% | 95.9% | |
表3
Y方向上位置、速度和加速度各项评判指标对比"
| Y方向 | 位置/m | 速度/(m/s) | 加速度/(m/s2) | |
| RMSE | CS-AF | 5.338 0 | 1.643 1e+06 | 1.378 8e+05 |
| MCS-AF | 3.995 4 | 8.460 4 | 0.527 0 | |
| 精度提高 | 25.2% | 99.9% | 99.9% | |
| ${\rm{\bar E}}$ | CS-AF | 2.638 5 | 4.987 1e+05 | 4.174 1e+04 |
| MCS-AF | 2.600 0 | 5.496 2 | 0.319 6 | |
| 精度提高 | 1.5% | 99.9% | 99.9% | |
| σ | CS-AF | 4.666 7 | 1.567 2e+06 | 1.315 4e+05 |
| MCS-AF | 3.003 3 | 6.438 4 | 0.419 5 | |
| 精度提高 | 35.6% | 99.9% | 99.9% | |
| 最高点 | CS-AF | 75.108 0 | 1.272 8e+07 | 7.632 7e+05 |
| MCS-AF | 22.284 6 | 30.407 4 | 3.058 4 | |
| 精度提高 | 70.3% | 99.9% | 99.9% | |
| 1 | WANG Q. Real-time integrated airport surface operations ma-nagement (RTI-ASOM)[C]//Proc. of the IEEE Integrated Com-munications, Navigation and Surveillance Conference, 2014. |
| 2 | 汤新民, 郑鹏程. 基于大地坐标系的IMM航空器短期航迹外推[J]. 系统工程与电子技术, 2022, 44 (7): 2293- 2301. |
| TANG X M , ZHENG P C . IMM aircraft short-term track extrapolation based on geodetic coordinate system[J]. Systems Engineering and Electronics, 2022, 44 (7): 2293- 2301. | |
| 3 |
WILKE S , MAJUMDAR A , OCHIENG W Y . The impact of airport characteristics on airport surface accidents and incidents[J]. Journal of Safety Research, 2015, 53, 63- 75.
doi: 10.1016/j.jsr.2015.03.006 |
| 4 |
TANG X M , ZHAO W J , GAO S F . Improved interacting multiple model algorithm airport surface target tracking based on geo-magnetic sensors[J]. International Journal of Distributed Sensor Networks, 2020, 16 (2): 155014772090456.
doi: 10.1177/1550147720904563 |
| 5 | LI H. Research on ADS-B 'In' strategic development[C]//Proc. of the IEEE 2nd International Conference on Civil Aviation Safety and Information Technology, 2020: 68-73. |
| 6 |
孟军, 马彦恒, 董健, 等. 基于改进"当前"统计模型的ADS-B目标跟踪方法[J]. 计算机测量与控制, 2013, 21 (2): 516- 519.
doi: 10.3969/j.issn.1671-4598.2013.02.074 |
|
MENG J , MA Y H , DONG J , et al. A target tracking method of ADS-B based on modified current statistic model[J]. Computer Measurement & Control, 2013, 21 (2): 516- 519.
doi: 10.3969/j.issn.1671-4598.2013.02.074 |
|
| 7 |
LI T Y , WANG B H , SHANG F T , et al. Threat model and construction strategy on ADS-B attack data[J]. IET Information Security, 2020, 14 (5): 542- 552.
doi: 10.1049/iet-ifs.2018.5635 |
| 8 |
BI Y , LI C K . Multi-scale convolutional network for space-based ADS-B signal separation with single antenna[J]. Applied Science-Basel, 2022, 12 (17): 8816.
doi: 10.3390/app12178816 |
| 9 | 邓晓波, 王飞, 杨光曜. 机载ADS-B技术现状与发展趋势[J]. 航空工程进展, 2021, 12 (1): 121- 128. |
| DENG X B , WANG F , YANG G Y . A survey on airborne ADS-B technology and its development trend[J]. Advances in Aeronautical Science and Engineering, 2021, 12 (1): 121- 128. | |
| 10 | JIANG E , SONG I , YOON W , et al. A design and implementation of a remote status monitor and control system for an ADS-B system[J]. The Journal of Korea Navigation Institute, 2014, 18 (4): 325- 333. |
| 11 |
ZHANG X Y , LI G F , XUE H J , et al. Pilots' scanning behavior between different airport intersection maneuvers in a simulated taxiing task[J]. IEEE Access, 2019, 7, 150395- 150402.
doi: 10.1109/ACCESS.2019.2947530 |
| 12 |
THAI P , ALAM S , LILITH N , et al. A computer vision framework using convolutional neural networks for airport-airside surveillance[J]. Transportation Research Part C-Emerging Technologies, 2022, 137, 103590.
doi: 10.1016/j.trc.2022.103590 |
| 13 | 朱新平, 徐川, 瞿菁菁, 等. 多跑道机场机动区滑行道运行方案设计及仿真评估[J]. 系统仿真学报, 2022, 34 (11): 2448- 2457. |
| ZHU X P , XU C , QU J J , et al. Design and simulation-based evaluation of taxiway operation scheme for multi-runway airport maneuvering area[J]. Journal of System Simulation, 2022, 34 (11): 2448- 2457. | |
| 14 | SINGER R A . Estimating optimal tracking filter performance for manned maneuvering targets[J]. IEEE Trans.on Aerospace and Electronic Systems, 1970, 5 (4): 470- 483. |
| 15 |
周宏仁. 机动目标"当前"统计模型与自适应跟踪算法[J]. 航空学报, 1983, 4 (1): 73- 86.
doi: 10.3321/j.issn:1000-6893.1983.01.013 |
|
ZHOU H R . A "current" statistical model and adaptive tracking algorithm for maneuvering targets[J]. Chinese Journal of Aeronautics, 1983, 4 (1): 73- 86.
doi: 10.3321/j.issn:1000-6893.1983.01.013 |
|
| 16 |
刘望生, 潘海鹏, 李亚安. 机动目标当前统计模型模糊自适应算法[J]. 兵工学报, 2016, 37 (11): 2037- 2043.
doi: 10.3969/j.issn.1000-1093.2016.11.011 |
|
LIU W S , PAN H P , LI Y A . A fuzzy adaptive algorithm for maneuvering target based on current statistical model[J]. Acta Armamentarii, 2016, 37 (11): 2037- 2043.
doi: 10.3969/j.issn.1000-1093.2016.11.011 |
|
| 17 | SUN W , YANG Y J . Adaptive maneuvering frequency method of current statistical model[J]. IEEE-CAA Journal of Automatica Sinica, 2017, 4 (1): 154- 160. |
| 18 | SINGERMAN P G, O'ROURKE S M, NARAYANAN R M, et al. Symbolic dynamics for radar target maneuver detection[C]//Proc. of the Conference on Radar Sensor Technology XXV, 2021: 1174207. |
| 19 | 张聃, 綦祥, 蔡云泽. 基于改进"当前"统计的交互式多模型算法研究[J]. 控制工程, 2017, 24 (2): 304- 308. |
| ZHANG D , QI X , CAI Y Z . Interacting multiple model algorithm based on improved current statistical models[J]. Control Engineering of China, 2017, 24 (2): 304- 308. | |
| 20 | 张浩为, 谢军伟, 葛佳昂, 等. 自适应CS模型的强跟踪平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2019, 41 (6): 1186- 1194. |
| ZHANG H W , XIE J W , GE J A , et al. Strong tracking square-root cubature Kalman filter over adaptive current statistical model[J]. Systems Engineering and Electronics, 2019, 41 (6): 1186- 1194. | |
| 21 | ZHANG H W , XIE J W , GE J A , et al. Strong tracking SCKF based on adaptive CS model for maneuvring aircraft tracking[J]. IET Radar, Sonar & Navigation, 2018, 12 (7): 742- 749. |
| 22 | FANG S, ZHAO C C, SUN J P. A fuzzy adaptive strong tracking algorithm with fading factor[C]//Proc. of the IEEE 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics, 2021. |
| 23 |
HOU Z W , BU F L . A small UAV tracking algorithm based on AIMM-UKF[J]. Aircraft Engineering and Aerospace Techno-logy, 2021, 93 (4): 579- 591.
doi: 10.1108/AEAT-01-2019-0013 |
| 24 |
LUO Y L , LI Z M , LIAO Y R , et al. Adaptive Markov IMM based multiple fading factors strong tracking CKF for maneuvering hypersonic-target tracking[J]. Applied Science-Basel, 2022, 12 (20): 10395.
doi: 10.3390/app122010395 |
| 25 | 石章松. 目标跟踪与数据融合理论及方法[M]. 北京: 国防工业出版社, 2010. |
| SHI Z S . Method and theory of target tracking and data fusion[M]. Beijing: National Defense Industry Press, 2010. | |
| 26 | 赵文杰, 汤新民, 黄忠涛, 等. 基于改进IMM算法的机场移动目标轨迹跟踪与预测[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44 (3): 468-473, 479. |
| ZHAO W J , TANG X M , HUANG Z T , et al. Track tracking and prediction of airport moving target based on improved IMM algorithm[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44 (3): 468-473, 479. | |
| 27 | 金学波. Kalman滤波器理论与应用-基于Matlab实现[M]. 北京: 科学出版社, 2016. |
| JIN X B . Theory and application of Kalman filter-implementation based on Matlab[M]. Beijing: Science Press, 2016. | |
| 28 | JIANG M J, MIAO C, NI P S, et al. An adaptive current statistical model based on estimation of target motion parameters[C]//Proc. of the IEEE 5th International Conference on Signal and Image Processing, 2020: 914-919. |
| 29 | HU H T, JING Z L. Improved current statistic model and adaptive filtering[C]//Proc. of the ASME International Design Engineering Technical Conferences & Computers & Information in Engineering Conference, 2005: 255-258. |
| 30 |
钱广华, 李颖, 骆荣剑. 一种基于改进的"当前"统计模型自适应跟踪算法[J]. 科学技术与工程, 2013, 13 (15): 4191-4196, 4200.
doi: 10.3969/j.issn.1671-1815.2013.15.010 |
|
QIAN G H , LI Y , LUO R J . An adaptive tracking algorithm based on improved "current" statistical model[J]. Science Techno-logy and Engineering, 2013, 13 (15): 4191-4196, 4200.
doi: 10.3969/j.issn.1671-1815.2013.15.010 |
|
| 31 | 周宏仁, 敬忠良, 王培德. 机动目标跟踪[M]. 北京: 国防工业出版社, 1991. |
| ZHOU H R , JING Z L , WANG P D . Tracking of maneuvering targets[M]. Beijing: National Defense Industry Press, 1991. | |
| 32 | 王会, 李东洋, 王静, 等. 基于ADS-B的航空器目标跟踪测量的仿真研究[J]. 计算机仿真, 2018, 35 (5): 60-63, 147. |
| WANG H , LI D Y , WANG J , et al. Simulation research on targets tracking measurement of aircraft based on ADS-B system[J]. Computer Simulation, 2018, 35 (5): 60-63, 147. |
| [1] | 刘政玮, 陈映, 鲁耀兵. 一种高分辨雷达空间目标跟踪方法研究[J]. 系统工程与电子技术, 2024, 46(2): 488-496. |
| [2] | 毕文豪, 周杰, 张安, 刘力. 杂波环境下基于最大熵模糊聚类的JPDA算法[J]. 系统工程与电子技术, 2023, 45(7): 1920-1927. |
| [3] | 王森, 鲍庆龙, 潘嘉蒙, 祝茜. 基于改进概率假设密度滤波器的非合作双基地雷达目标跟踪[J]. 系统工程与电子技术, 2023, 45(7): 2002-2009. |
| [4] | 舒刊, 万显荣, 易建新, 谢德强, 胡越洋, 童云. 基于状态解耦的两坐标外源雷达3D目标跟踪[J]. 系统工程与电子技术, 2023, 45(6): 1658-1666. |
| [5] | 王文益, 钟仁伟. 基于交替方向乘子法的单天线ADS-B信号分离[J]. 系统工程与电子技术, 2023, 45(5): 1286-1296. |
| [6] | 刘政玮, 陈映, 鲁耀兵. 适用于多目标轨迹小角度交叉的PHD滤波器[J]. 系统工程与电子技术, 2023, 45(4): 982-990. |
| [7] | 张毅, 于浩, 杨秀霞, 姜子劼. 无人机集群分组编队控制跟踪一体化设计[J]. 系统工程与电子技术, 2023, 45(3): 848-858. |
| [8] | 张昀普, 单甘霖, 黄燕, 付强. 考虑盲区的多移动传感器地面目标检测跟踪调度方法[J]. 系统工程与电子技术, 2023, 45(2): 453-464. |
| [9] | 陈维义, 何凡, 刘国强, 毛伟伟. 变结构交互式多模型滤波和平滑算法[J]. 系统工程与电子技术, 2023, 45(12): 4005-4012. |
| [10] | 衡博文, 李翠芸, 李想. 基于MLS的三维扩展目标PMBM跟踪算法[J]. 系统工程与电子技术, 2023, 45(11): 3411-3418. |
| [11] | 丁建立, 张琪琪, 王静, 霍纬纲. 基于Transformer-VAE的ADS-B异常检测方法[J]. 系统工程与电子技术, 2023, 45(11): 3680-3689. |
| [12] | 黄艳堃, 邓玉辉, 孙光才, 邢孟道. 基于时间信息加权的ViSAR目标阴影跟踪算法[J]. 系统工程与电子技术, 2023, 45(10): 3065-3075. |
| [13] | 安雷, 李召瑞, 吉兵. 杂波环境下可移动主被动传感器长时调度方法[J]. 系统工程与电子技术, 2023, 45(1): 165-174. |
| [14] | 仇祝令, 查宇飞, 李振宇, 李禹铭, 张鹏, 朱川. 基于多模型蒸馏的时间正则化相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(8): 2448-2456. |
| [15] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||