
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (2): 487-498.doi: 10.12305/j.issn.1001-506X.2021.02.23
张普( ), 薛惠锋(), 高山(), 左轩()
), 薛惠锋(), 高山(), 左轩()
收稿日期:2020-08-19
出版日期:2021-02-01
发布日期:2021-03-16
作者简介:张普(1990-),女,博士研究生,主要研究方向为多智能体协同容错跟踪控制。E-mail:基金资助:
Pu ZHANG(), Huifeng XUE(), Shan GAO(), Xuan ZUO()
Received:2020-08-19
Online:2021-02-01
Published:2021-03-16
摘要:
针对具有弱通讯的高阶严反馈非线性多智能体系统,提出一种新颖的分布式自适应反演控制方法,并研究了该系统的协同跟踪控制问题。首先,以5个智能体作为被控对象,其中一个智能体以分布式结构组成“领航者-跟随者”编队模式,并且将领航者的运动速度作为整个编队系统的前行速度,其余智能体作为跟随者跟随领航者编队运动。其次,采用自适应反演方法,对系统中由于弱通讯导致的不确定参数进行自适应估计,并对系统设计补偿追踪控制律,使系统中的智能体能够实现自主跟踪时变的参考轨迹,最终以最优的轨迹避开障碍物,并保持期望队形运动。接着,根据Lyapunov稳定性理论,证明了所提方法的有效性。最后,通过仿真对比表明,所提方法能够使多智能体系统的横向、纵向跟踪误差以及参考轨迹的相对误差均实现快速收敛,并在跟踪过程中保持该系统渐近稳定。
中图分类号:
张普, 薛惠锋, 高山, 左轩. 具有弱通讯的多智能体分布式自适应协同跟踪控制[J]. 系统工程与电子技术, 2021, 43(2): 487-498.
Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed adaptive cooperative tracking control of multi-agent system with weak communication[J]. Systems Engineering and Electronics, 2021, 43(2): 487-498.
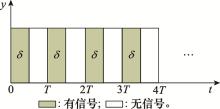
图1
智能体之间信息交互弱通讯示意图"
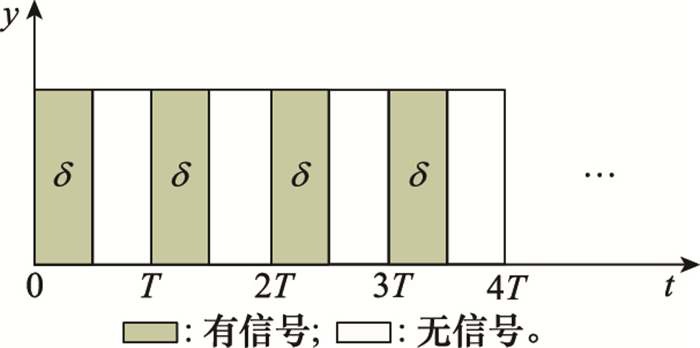

图2
障碍物、智能体以及目标之间的受力关系图"

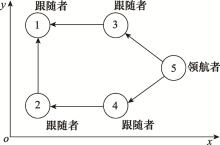
图3
多智能体系统拓扑结构示意图"
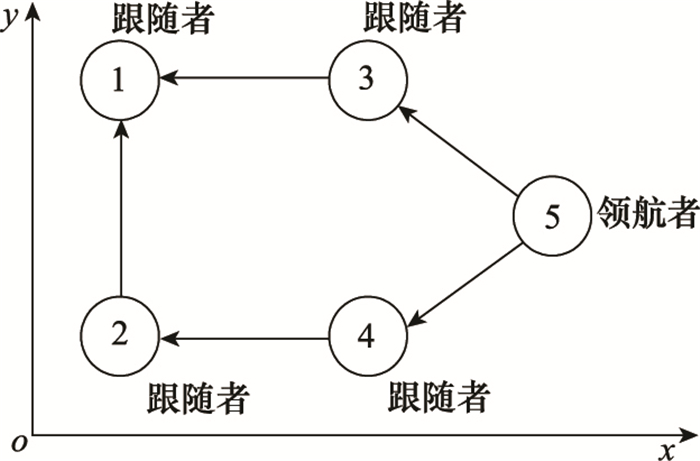
表1
5个智能体的初始位置,期望指定位置以及参数估计值"
智能体编号 | (x0, y0)/m | (δix, δiy)/m | ( |
| 智能体#1 | (1, 2) | (1, 3) | (3, 6) |
| 智能体#2 | (2, 1) | (1, 1) | (5, 2) |
| 智能体#3 | (3, 3) | (4, 3) | (4, 3) |
| 智能体#4 | (2, 5) | (4, 1) | (7, 1) |
| 智能体#5 | (4, 2) | (6, 2) | (10, 4) |
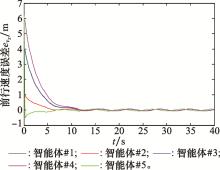
图4
多智能体系统前行速度误差曲线"
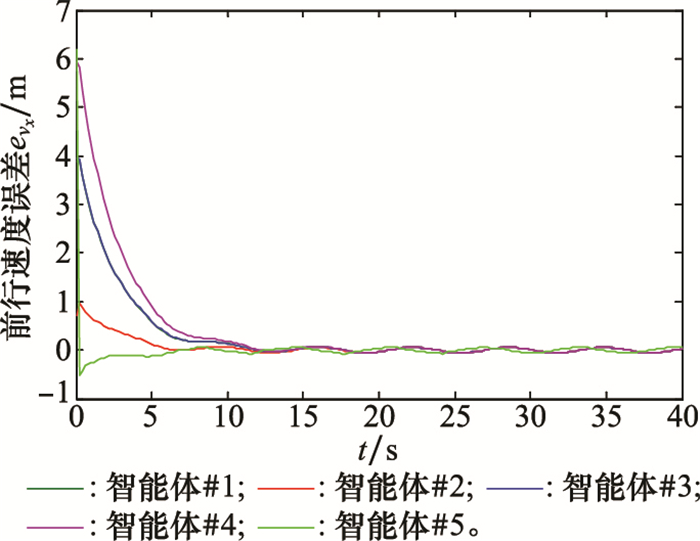
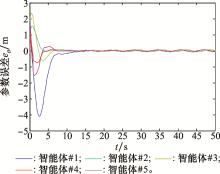
图5
参数误差$ {\hat \theta }$曲线"
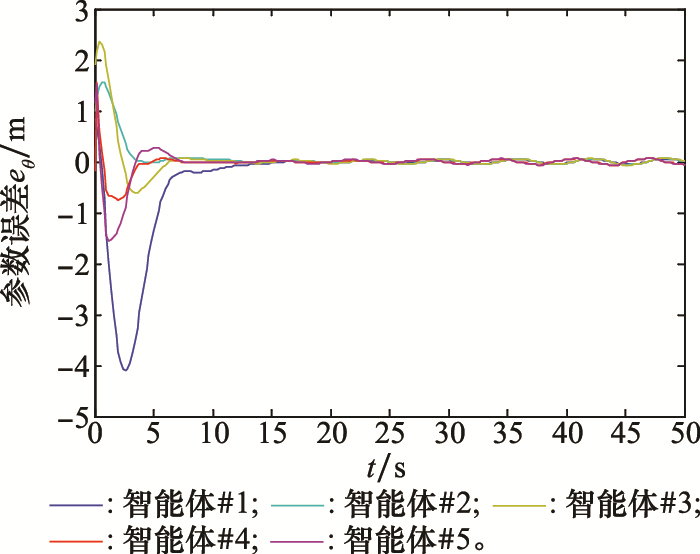
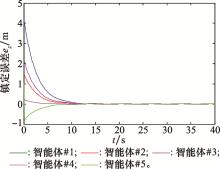
图6
镇定误差曲线"
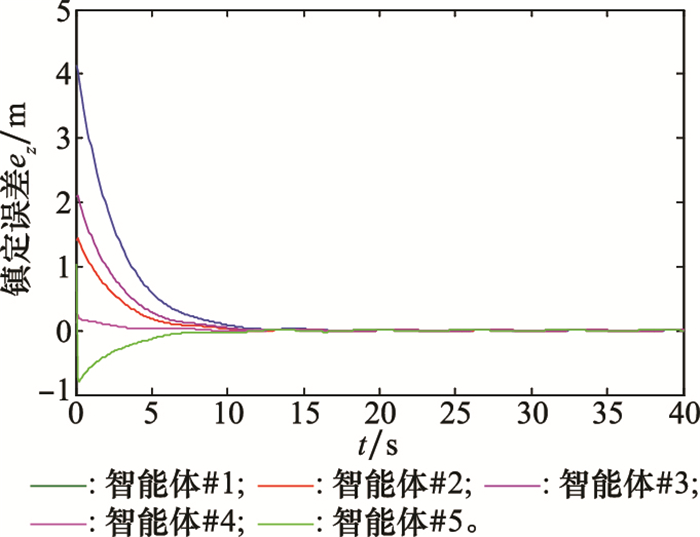
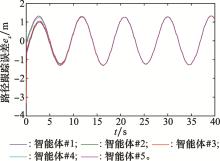
图7
多智能体系统在x方向的跟踪误差曲线"
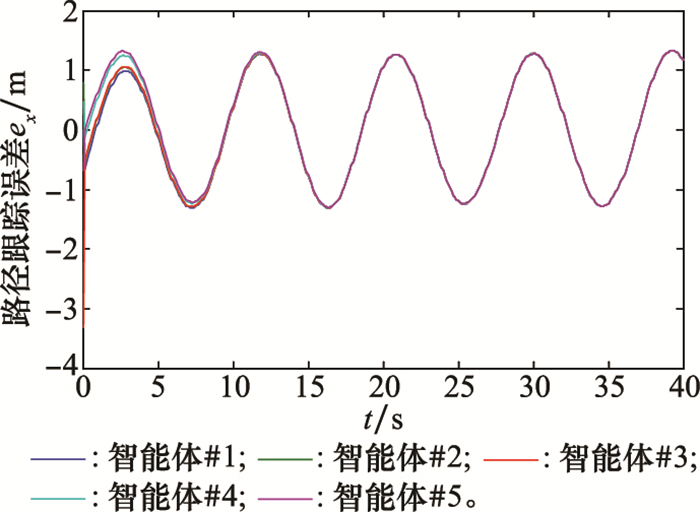
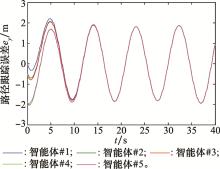
图8
多智能体系统在y方向的追踪误差曲线"
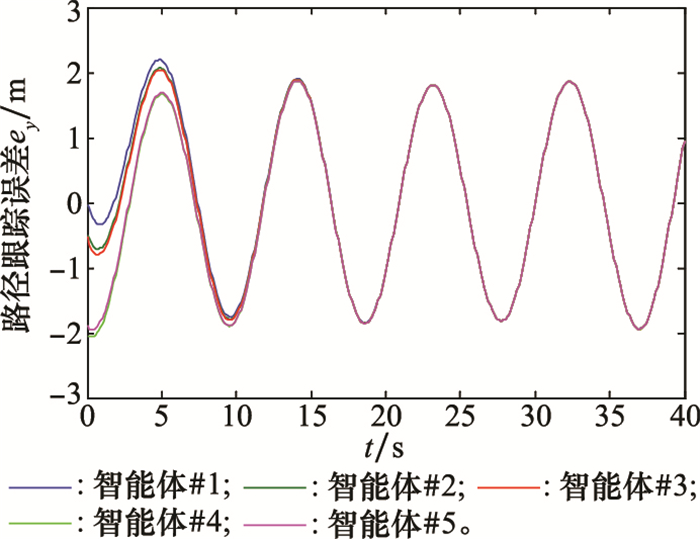
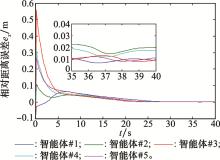
图9
多智能体系统在x方向的相对距离误差曲线"
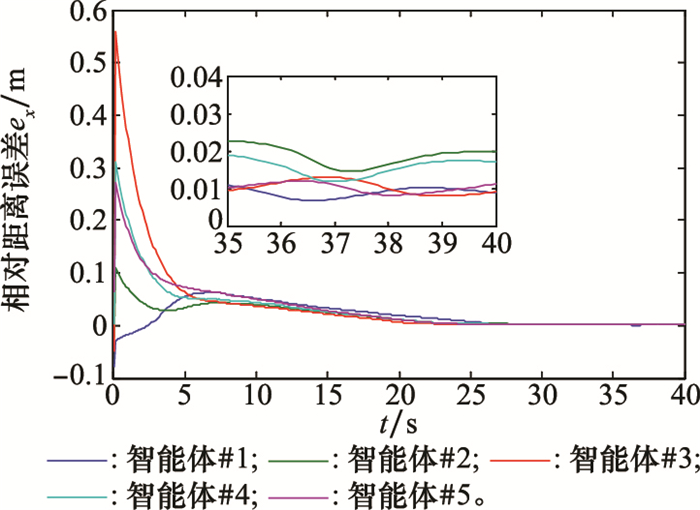
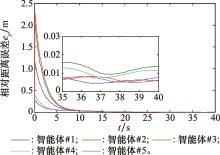
图10
多智能体系统在y方向的相对距离误差曲线"
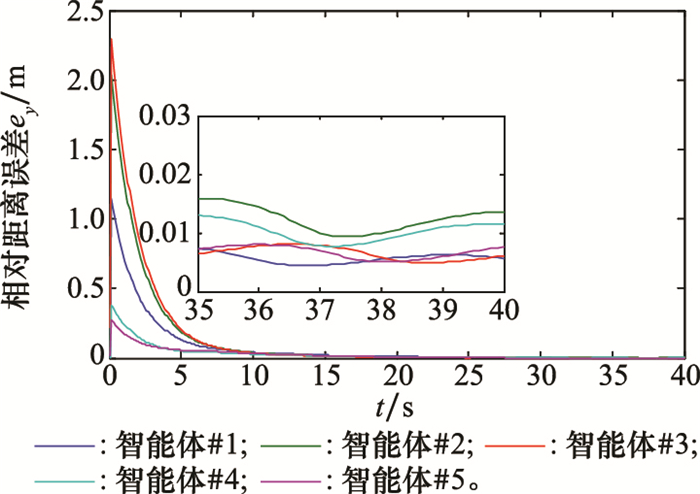
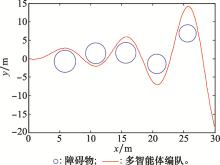
图11
多智能体避障曲线"
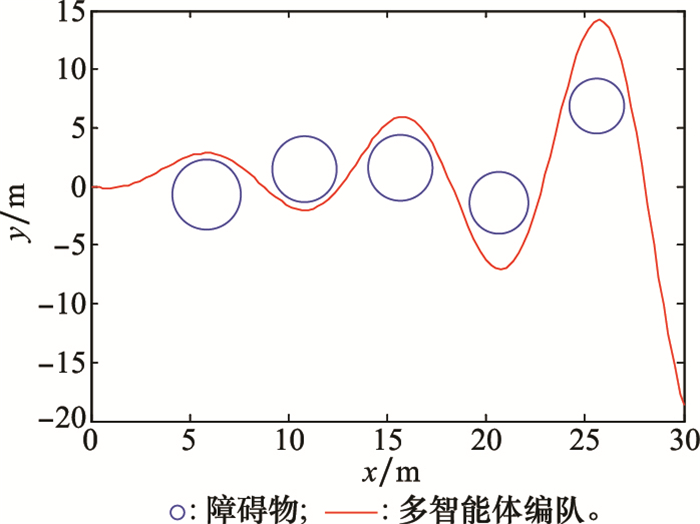
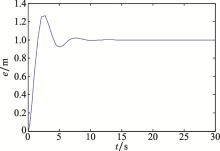
图12
多智能体避障过程相对距离误差曲线图"
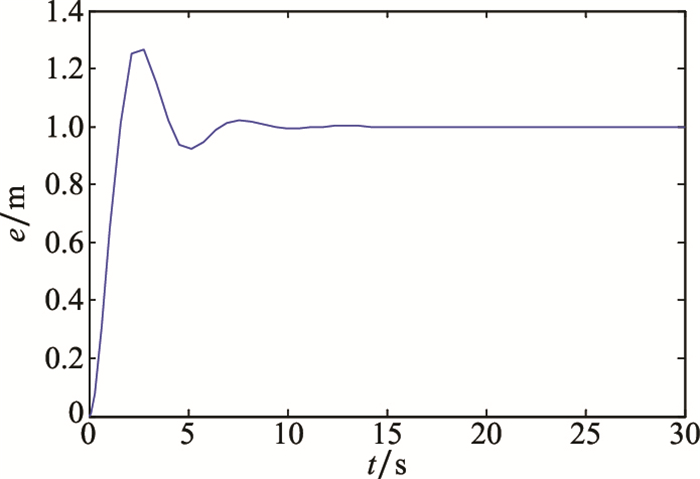
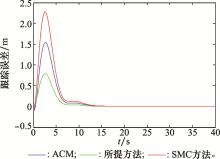
图13
多智能体跟踪误差曲线"
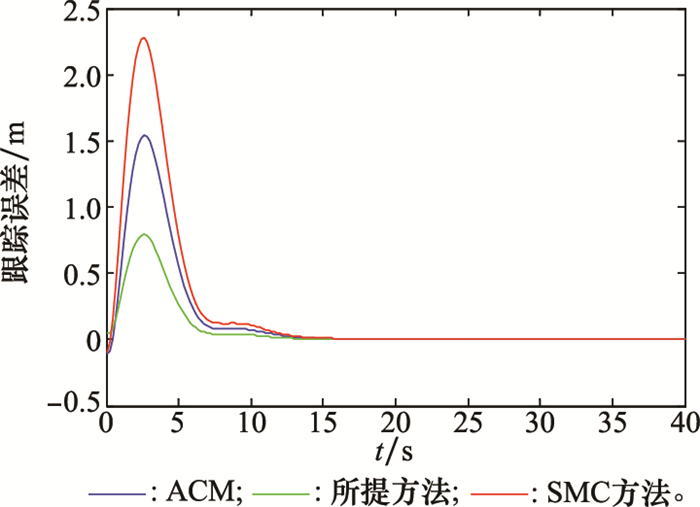
表2
3种方法跟踪效果指标对比"
| 方法 | 稳态误差/m | 稳定时间/s |
| 所提方法 | 0.62 | 7.1 |
| SMC方法 | 2.32 | 16.3 |
| ACM方法 | 1.61 | 13.1 |
| 1 | 张志伟, 滕英元, 杨慧欣, 等. 具有速度、加速度约束的机器人编队避障控制[J]. 控制理论与应用, 2020, 37 (6): 1388- 1396. |
| ZHANG Z W , TENG Y Y , YANG H X , et al. Obstacle avoidance control for robots formation with speed and acceleration constraints[J]. Control Theory & Applications, 2020, 37 (6): 1388- 1396. | |
| 2 |
张志伟, 滕英元. 机器人编队协同控制方法综述[J]. 机电信息, 2019, (32): 28- 30.
doi: 10.3969/j.issn.1671-0797.2019.32.015 |
|
ZHANG Z W , TENG Y Y . Overview of collaborative control methods for robot formation[J]. Mechanical and Electrical Information, 2019, (32): 28- 30.
doi: 10.3969/j.issn.1671-0797.2019.32.015 |
|
| 3 | 芮可人, 王丽华, 谢能刚. 基于虚拟结构优化模型的多机器人编队形成方法[J]. 现代信息科技, 2019, 3 (18): 56- 58. |
| RUI K R , WANG L H , XIE N G . Formation method of multi-robot formation based on virtual structure optimization model[J]. Modern Information Technology, 2019, 3 (18): 56- 58. | |
| 4 |
ZHANG J L , YAN J G , ZHANG P . Multi-UAV formation control based on a novel back-stepping approach[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (3): 2437- 2448.
doi: 10.1109/TVT.2020.2964847 |
| 5 |
WEN G G , ZHAI X Q , PENG Z X , et al. Fault-tolerant secure consensus tracking of delayed nonlinear multi-agent systems with deception attacks and uncertain parameters via impulsive control[J]. Communications in Nonlinear Science and Numerical Simulation, 2020, 82, 105043.
doi: 10.1016/j.cnsns.2019.105043 |
| 6 |
CHENG Y , UGRINOVSII V . Event-triggered leader-following tracking control for multivariable multi-agent systems[J]. Automatica, 2016, 70, 204- 210.
doi: 10.1016/j.automatica.2016.04.003 |
| 7 |
HU J P , FENG G . Distributed tracking control of leader-follower multi-agent systems under noisy measurement[J]. Automatica, 2010, 46 (8): 1382- 1387.
doi: 10.1016/j.automatica.2010.05.020 |
| 8 | BEN-OR M , GOLDWASSER S , WIGDERSON A . Completeness theorems for non-cryptographic fault-tolerant distributed computation[M]. Jerusalem: Hebrew University Press, 2019. |
| 9 | ZHAO B , LIU D R , LI Y C . Observer based adaptive dynamic programming for fault tolerant control of a class of nonlinear systems[J]. Information Sciences, 2017, (384): 21- 33. |
| 10 | WANG J , LIANG K , HUANG X , et al. Dissipative fault-tolerant control for nonlinear singular perturbed systems with Markov jumping parameters based on slow state feedback[J]. Applied Mathematics & Computation, 2018, 328, 247- 262. |
| 11 |
SHI G D , HONG Y G . Global target aggregation and state agreement of nonlinear multi-agent systems with switching topologies[J]. Automatica, 2009, 45 (5): 1165- 1175.
doi: 10.1016/j.automatica.2008.12.015 |
| 12 |
YU W , ZHENG W X , CHEN G , et al. Second-order consensus in multi-agent dynamical systems with sampled position data[J]. Automatica, 2011, 47 (7): 1496- 1503.
doi: 10.1016/j.automatica.2011.02.027 |
| 13 |
OLIVEIRA L B , CAMPONOGARA E . Multi-agent model predictive control of signaling split in urban traffic networks[J]. Transportation Research Part C: Emerging Technologies, 2010, 18 (1): 120- 139.
doi: 10.1016/j.trc.2009.04.022 |
| 14 |
GUERRA E , BOLEA Y , GAMIZ J , et al. Design and implementation of a virtual sensor network for smart waste water monitoring[J]. Sensors, 2020, 20 (2): 358.
doi: 10.3390/s20020358 |
| 15 | HAN Y , ZHANG K , LI H , et al. MAS-based distributed coordinated control and optimization in microgrid and microgrid clusters: a comprehensive overview[J]. IEEE Trans.on Power Electronics, 2017, 33 (8): 6488- 6508. |
| 16 |
LIU R T , BURKE T A , ABRAMSON L Y , et al. The behavioral approach system (BAS) model of vulnerability to bipolar disorder: evidence of a continuum in BAS sensitivity across adolescence[J]. Journal of Abnormal Child Psychology, 2018, 46 (6): 1333- 1349.
doi: 10.1007/s10802-017-0363-9 |
| 17 |
CHEN S M , PEI H Q , LAI Q , et al. Multitarget tracking control for coupled heterogeneous inertial agents systems based on flocking behavior[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2019, 49 (12): 2605- 2611.
doi: 10.1109/TSMC.2017.2789335 |
| 18 | LI J, XUE D R, ZHANG J X. Multi-UUV formation coordination control based on combination of virtual structure and leader[C]//Proc.of the IEEE International Conference on Mechatronics and Automation, 2018: 1574-1579. |
| 19 | 刘安东,秦冬冬,金哲豪,等.一种基于虚拟结构法的多移动机器人分布式预测控制方法[P].中国: CN201910693124.5, 2020-01-17. |
| LIU A D, QIN D D, JIN Z H, et al. A distributed predictive control for multiple mobile robots based on virtual structure method[P]. China: CN201910693124.5, 2020-01-17. | |
| 20 | HE W , ZHANG B , HAN Q L , et al. Leader-following consensus of nonlinear multi-agent systems with stochastic sampling[J]. IEEE Trans.on Cybernetics, 2016, 47 (2): 327- 338. |
| 21 |
YAN C , FANG H Z , CHAO H Y . Energy-aware leader-follower tracking control for electric-powered multi-agent systems[J]. Control Engineering Practice, 2018, 79, 209- 218.
doi: 10.1016/j.conengprac.2018.07.013 |
| 22 | NING B , HAN Q L , LU Q . Fixed-time leader-following consensus for multiple wheeled mobile robots[J]. IEEE Trans.on Cybernetics, 2019, 50 (10): 4381- 4392. |
| 23 |
BAINY R G , SILVA K , LOTFIFARD S , et al. Dynamic zone selection for busbar protection based on graph theory and boolean algebra[J]. IEEE Trans.on Power Delivery, 2020, 35 (4): 1769- 1778.
doi: 10.1109/TPWRD.2019.2953594 |
| 24 | YING K Z. Flight path planning of agriculture UAV based on improved artificial potential field method[C]//Proc.of the IEEE Chinese Control and Decision Conference, 2018: 1526-1530. |
| 25 | REN W, MOORE K, CHEN Y Q. High-order consensus algorithms in cooperative vehicle systems[C]//Proc.of the IEEE International Conference on Networking, Sensing and Control, 2006: 457-462. |
| 26 |
LIU J , FANG J A , LI Z , et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topology and input saturation[J]. International Journal of Control, Automation and Systems, 2020, 18 (4): 991- 1001.
doi: 10.1007/s12555-019-0473-y |
| 27 |
YU W , ZHENG W X , CHEN G , et al. Second-order consensus in multi-agent dynamical systems with sampled position data[J]. Automatica, 2011, 47 (7): 1496- 1503.
doi: 10.1016/j.automatica.2011.02.027 |
| 28 |
WANG W , HUANG C , HUANG C X , et al. Bipartite formation problem of second-order nonlinear multi-agent systems with hybrid impulses[J]. Applied Mathematics and Computation, 2020, 370, 124926.
doi: 10.1016/j.amc.2019.124926 |
| 29 |
ISLAM S , XIROS N I . Robust asymptotic and finite-time tracking for second-order nonlinear multi-agent autonomous systems[J]. International Journal of Control, Automation and Systems, 2019, 17 (12): 3069- 3078.
doi: 10.1007/s12555-018-0470-6 |
| 30 |
REN W , BEARD R W . Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Trans.on Automatic Control, 2005, 50 (5): 655- 661.
doi: 10.1109/TAC.2005.846556 |
| 31 |
HU J L , SUN X X , HE L . Formation tracking for nonlinear multi-agent systems with input and output quantization via adaptive output feedback control[J]. Journal of Systems Science and Complexity, 2020, 33, 401- 425.
doi: 10.1007/s11424-019-8087-2 |
| 32 |
LI J S , LI J M . Distributed adaptive fuzzy iterative learning control of coordination problems for higher order multi-agent systems[J]. International Journal of Systems Science, 2016, 47 (10): 2318- 2329.
doi: 10.1080/00207721.2014.993139 |
| [1] | 张普, 薛惠锋, 高山, 左轩. 具有混合执行器故障的多智能体分布式有限时间自适应协同容错控制[J]. 系统工程与电子技术, 2022, 44(4): 1220-1229. |
| [2] | 罗哲, 权婉珍, 张朴睿, 杨小冈. 单边Lipschitz非线性多智能体系统一致性追踪控制[J]. 系统工程与电子技术, 2022, 44(1): 279-284. |
| [3] | 刘家义, 岳韶华, 王刚, 姚小强, 张杰. 复杂任务下的多智能体协同进化算法[J]. 系统工程与电子技术, 2021, 43(4): 991-1002. |
| [4] | 高昂, 董志明, 李亮, 宋敬华, 段莉. MADDPG算法并行优先经验回放机制[J]. 系统工程与电子技术, 2021, 43(2): 420-433. |
| [5] | 刘家义, 王刚, 张杰, 王闯, 宋喜团. 基于改进AGD-分布式多智能体系统的目标优化分配模型[J]. 系统工程与电子技术, 2020, 42(4): 863-870. |
| [6] | 赖作镁, 乔文昇, 古博, 王师逸. 任务性能约束下传感器协同辐射控制策略[J]. 系统工程与电子技术, 2019, 41(8): 1749-1754. |
| [7] | 孙一杰, 张国良, 张胜修, 曾静. 一类离散时间异构多智能体系统有向图下的一致性分析[J]. 系统工程与电子技术, 2015, 37(3): 693-699. |
| [8] | 付强,王刚,肖金科,郭相科,韦刚. 空天高速飞行器多传感器协同跟踪任务规划研究[J]. 系统工程与电子技术, 2014, 36(10): 2007-2012. |
| [9] | 符小卫, 冯慧成, 高晓光. 通信距离约束下双无人机目标跟踪算法[J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1663-1668. |
| [10] | 刘钦, 刘峥, 刘韵佛, 谢荣. 多传感器优化部署下的机动目标协同跟踪算法[J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 304-309. |
| [11] | 杨海燕, 王琳, 尤政. 网络协同跟踪下广义分布式航迹关联方法[J]. Journal of Systems Engineering and Electronics, 2012, 34(1): 160-167. |
| [12] | 佘莹莹, 方华京. 多智能体系统的有限时间跟踪控制[J]. Journal of Systems Engineering and Electronics, 2011, 33(8): 1871-1874. |
| [13] | 徐世许, 马建敏. 不确定多变量线性系统的快速收敛滑模控制[J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1585-1589. |
| [14] | 刘跃峰, 张安. 有人机/无人机编队协同任务分配方法[J]. Journal of Systems Engineering and Electronics, 2010, 32(3): 584-587. |
| [15] | 马永杰, 马义德, 蒋兆远, 孙启国. 一种快速遗传算法及其收敛性[J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 714-718. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||