


0 引言
近年来,空战决策的研究也日益增多,文献[7]引入博弈论的思想,提出了构建自由空战指挥引导对策模型的思路,但并未给出仿真结果。文献[8]提出了一种结合近似动态规划与零和博弈的在线积分策略迭代算法,解决了机动决策建模存在的“维数灾难”问题,但有学习周期偏长、难以应付复杂机动等缺点。文献[9]利用多状态转移马尔可夫网络构建机动决策网络,满足了空战决策的实时性要求,但未利用网络参数进行学习。文献[10]提出一种进化式的专家系统树方法来研究空战决策,解决了传统专家系统方法无法应付非预期情况的问题,但其设定的仿真环境较为简单。文献[11]提出了一种矩阵对策法与遗传算法相结合的空战决策算法,建立了无人机空战决策模型,满足空战合理性与实时性需求,但只对直线和S型飞行两种蓝色战机模型进行了仿真研究。
本文将深度强化学习与博弈相结合,提出了一种基于深度强化学习的算法——Minimax-深度Q网络(deep Q network, DQN)。该方法使用Minimax算法[16]构建线性规划来求解每个特定状态阶段博弈的纳什均衡策略,并引入DQN来更新动作状态值函数,以得到一种针对高决策水平对手的最优策略。
1 随机博弈与深度强化学习
本文为研究空战中红蓝双方战机的对抗情况,获得一种对红方有利的最优空战策略,需要用到博弈论以及深度强化学习的理论知识。
1.1 博弈论
本文研究的空战博弈实际上就是红蓝双方的对抗过程,双方的竞争性质可以利用博弈论的知识概括。博弈论是研究决策者在决策主体各方相互作用的情况下,如何进行决策以及有关该决策的均衡问题的理论[17],被广泛应用于军事问题研究。
博弈论的一个重要策略组合叫作纳什均衡[18],即在一组策略中,所有的局中人在其他人不改变策略的情况下,此时的策略是最优的。即联立策略(π1*, π2*, …, πn*)满足
则为一个纳什均衡。
1.2 深度强化学习
马尔可夫决策过程(Markov decision process, MDP)是指决策者周期性地或连续性地观察具有马尔可夫性的随机动态系统,序贯地作出决策[21],即根据当前的观测状态选择一个动作执行到达下一步的状态,下一步的状态只与当前的状态和动作有关。
深度学习通过构建基于表示的多层机器学习模型,训练海量数据,学习有用特征,以达到提升识别、分类或预测的准确性[24]。深度学习具有较强的感知能力,但缺乏一定的决策力,因此将深度学习与强化学习相结合,为系统的感知决策问题提供了解决思路。
1.3 随机博弈
由于空战博弈是一个动态过程,而传统博弈一般是单步的,因此需要从传统博弈拓展到随机博弈。
MDP包含一个玩家和多个状态,而矩阵博弈包含多个玩家和一个状态。对于具有多个玩家和多个状态的博弈,定义了一种MDP与矩阵博弈相结合的博弈方法,称为马尔可夫博弈,即随机博弈[27]。
随机博弈可表示为一个元组[28], (n, S, A1, A2, …,An, T, γ, R1, R2, …, Rn),其中包含的要素如下。
(1)个数n:表示玩家数量。
(2)状态S:状态是对环境的描述,在智能体做出动作后,状态会发生改变,其演变具有马尔可夫性。
(3)动作A:动作是对智能体行为的描述,是决策的结果。动作空间可以是离散或连续的。
(4)转移函数T:由给定玩家当前状态s和每个智能体的一个动作Ai控制,转移概率在[0, 1]之间。
(5)折扣因子γ:折扣因子是对未来奖励的衰减, γ∈[0, 1]。
(6)回报函数R:表示指定玩家在状态s采取联合行为(A1, A2, …, An)后在状态s′处取得的回报。
随机博弈环境中的每个智能体都由一组状态S和一组动作集A1, A2, …, Ak定义,状态转换由当前状态s和每个智能体的一个动作Ai控制,每个智能体都有一个相关的奖励函数,试图最大化其预期的折扣奖励之和。与MDP类似,随机博弈中玩家下一状态和回报只取决于当前状态和所有玩家的当前行为。求解随机博弈需要找到一个策略π,使得具有折扣因子γ的玩家的未来折扣回报最大化。
2 空战博弈建模
2.1 空战问题描述
本文红蓝双方战机采用文献[29]中开发的模拟无人机的动力学方程,在笛卡尔坐标系下构建战机的运动模型。空战态势主要由红蓝战机的位置(xpos, ypos)、航迹偏角Ψ、滚转角ϕ、滚转角变化率
其中航迹偏角的限制范围为[-180°, 180°],滚转角的范围受实际飞机最大转弯能力限制,具体如图1所示。红方战机的目标是在蓝方战机背后取得并保持优势地位,可使用视界角(angle of aspect, AA)和天线偏转角(antenna train angle, ATA)来量化此优势位置。此外,航向交叉角(heading crossing angle, HCA)也用于描述红蓝战机之间的朝向差异。
图1
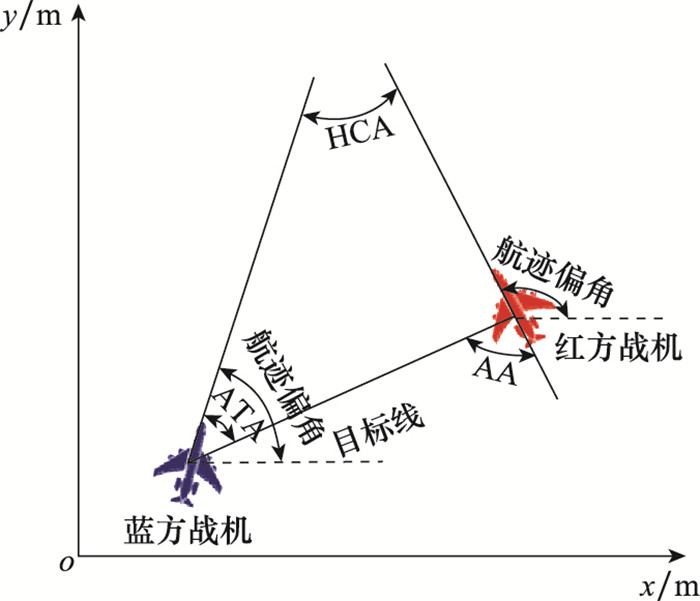
图1
红蓝双方战机相对几何关系
Fig.1
Relative geometric relationship between the red and the blue fighters
2.2 随机博弈建模
本文将红蓝双方战机作为智能体,以二人零和博弈为条件对空战博弈进行建模。根据第1.2节可知,随机需要确定一个元组(n, S, A1, A2, …,An, T, γ, R1, R2, …, Rn),根据此一元组来构建空战中的随机博弈模型。
2.2.1 随机博弈模型
首先需要确定随机博弈环境中每个智能体需要的状态空间S、动作空间A和奖励函数R,智能体为当前状态s决策选择一个动作Ai到达下一个状态s′,并得到与环境交互后反馈奖励r,然后进行下一轮交互,由此实现循环。
(1)个数n:红蓝双方战机对抗中玩家数量n为2。
(2)状态空间S:根据影响战机空战态势的因素,可以确定战机的状态特征,主要由红方战机的坐标(xrpos, yrpos)、蓝方战机坐标(xbpos, ybpos)、航迹偏角φ和滚转角ϕ组成。由此可得博弈的状态空间可表示为
由于战机的状态空间是连续无限空间,所以需要用到深度学习神经网络来处理这些特征。
(3)动作A:战机的可选机动动作设置为向左滚转、维持滚转和向右滚转,分别用L, S, R代表这3种可选动作,构建离散的动作空间,则红方的动作空间为Ar={L, S, R},同理蓝方动作空间为Ab={L, S, R}。
(4)转移函数T:以红方为例,红方当前状态s在红方根据策略选择的动作a与对手蓝方选择的动作o的联合行为(a, o)影响下,转移到下一状态s′的概率。
(5)折扣因子γ:折扣因子在[0, 1]中选取,一般为0.9左右。
(6)回报函数R:在随机博弈中,使用MDP的Q值来表示即时收益。以Q(s, a, o)表示每个状态s下,己方采取动作a及蓝方采取动作o的预期奖励。根据导弹的攻击区域,设定到达导弹可攻击范围为有利态势。对于红方的奖励值r,若红方到达有利态势返回r=1,若对手蓝方到达有利态势则r=-1,其余情况r=0。
2.2.2 战机优势奖励函数
图2
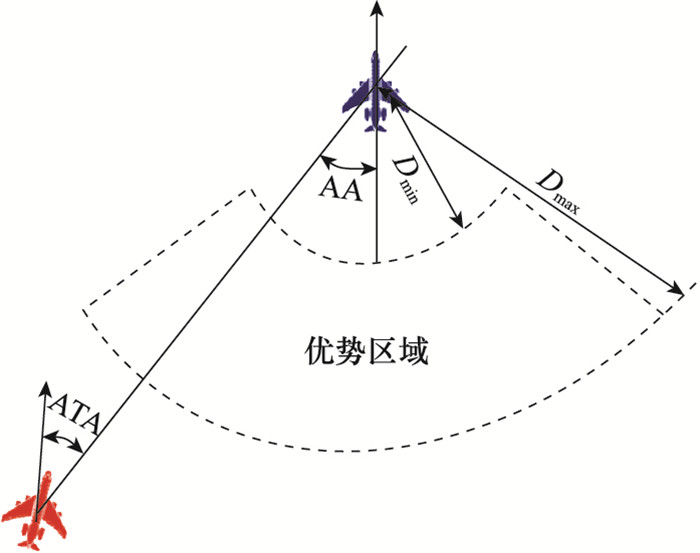
红方战机取得优势需要满足4个条件:①红方战机与蓝方战机的欧氏距离D在Dmin到Dmax范围内,该区域根据战机的速度和武器攻击范围决定; ②红方战机与蓝方战机的高度差H在Hmin到Hmax范围内,该范围由战机的速度和武器攻击范围决定; ③红方战机的AA在指定视界范围内; ④红方战机的ATA在指定ATA范围内。同时满足以上4个条件则判定红方取得优势,并获得奖励值r=1,即占据有利态势的要求如下所示:
2.2.3 随机博弈价值函数
对于多人随机博弈,已知回报函数和转移函数,期望求得其纳什均衡解,即每个智能体的联合策略,智能体的策略就是动作空间的概率分布。由于在博弈环境下,预期回报会受到对手策略的影响,而在红蓝战机空战博弈中,一般无法预测到对手的动作。在此基础上,本文采用Minimax算法选取随机博弈的最优策略。假设对手拥有高水平决策能力,在蓝方选取使红方收益最小的动作的前提下,红方选取使自己收益最大的动作,该思想与追逃博弈类似。Minimax算法的意义在于,在最坏的情况下获取最大的回报。
MDP的价值函数表示最优策略所获得的预期折扣回报和,状态值函数V(s)和状态动作值函数Q(s, a)的公式如下:
式中, T(s, a, o, s′)表示状态s经过动作a, o到达状态s′的转移概率。
由此可得,随机博弈状态s下的最优值函数V(s)可表示为
式中,PD(A)表示动作的离散概率分布。根据式(5)可以使用线性规划约束方法求得状态s下的最优策略π和最优值函数V。
对于状态s下红方动作a及蓝方动作o的动作状态值函数Q(s, a, o)为
通过上述的递归方程可以经过迭代求得收敛的最优值函数,进而得到最优策略π。
由于红蓝双方战机对抗属于混合策略博弈,即博弈双方选择某一动作并不是确定的,而是对所有动作都有一个选择概率,此概率就是通过线性规划求得的最优策略π。因此本文采用轮盘赌选择法进行动作选择,个体的适应度越高,被选择的概率越大。
3 深度强化学习空战博弈实现
3.1 空战深度强化学习模型
由于在博弈情境下,转移函数难以确定,对于式(6)中使用值迭代求解MDP的传统方法涉及的状态转移函数T,可以利用强化学习中的异步更新方式Q-learning[31]替代。
Q-learning利用时间差分目标来更新当前行为值函数,每当状态s采取动作a转换到状态s′时得到奖励r进行更新:
由于执行更新的概率正是T(s, a, s′),所以可以取代转移函数。将Q-learning的方法应用到随机博弈中,式(6)可转化为
式中, α代表学习效率。
与传统的Q-learning相比, Minimax-Q方法结合了博弈论的思想,用Minimax值替换了Q-learning中的最大值,以得到博弈条件下需要的最优策略。
此外,由第2.2节可知,红蓝双方战机对抗的空战博弈所涉及的状态为连续无限空间,所以需要用到深度学习神经网络处理特征。因此,将Minimax-Q方法进一步拓展,加入深度神经网络来逼近值函数,利用经验回放训练强化学习的学习过程,并设置独立的目标网络来处理时间差分目标。
DQN将Q-learning中的线性函数逼近以神经网络参数形式非线性逼近,可以处理空战博弈下高维度的非线性输入数据。DQN的行为值函数对应一组参数,在神经网络里对应每层网络的权重,用θ表示,更新值函数实际上就是更新θ参数[32]。
Q网络由输入层、隐藏层和输出层构成,本文构建的神经网络输入为战机的状态特征,即S=(xrpos, yrpos, φr, ϕr, xbpos, ybpos, φb, ϕb)共8个节点,输出为状态s下所有红方可选动作a及蓝方动作o对应的Q(s, a, o)。由于红蓝双方战机可选动作共有3种,所以输出为9个节点。
将智能体与环境交互得到的当前状态s、红方采取的动作a、蓝方采取的动作o、对应的奖励值r以及执行动作到达的下一状态s′作为一个五元组{s, a, o, r, s′}存储到记忆库。记忆库的大小是有限的,当记录库存储满后,新一组数据会覆盖记忆库中的第一组数据。从记忆库中随机抽取一定大小的数据作为训练样本,并计算出目标Q值来训练神经网络,计算目标Q值的方式即式(8)。
3.2 DQN网络训练过程
由于强化学习是试错学习,要通过环境反馈的奖励Reward来优化损失函数,损失函数为loss=(target_q-q)2,采用的优化方法为梯度下降。用神经网络逼近值函数时,若计算目标值函数的网络与梯度计算逼近值函数的网络参数相同,会因为数据的关联性导致训练结果不稳定。因此需要定义两个神经网络,目标网络与Q网络的结构完全相同,但内部的参数不同。目标网络拥有Q网络一段时间以前的参数,这组参数被固定一段时间后,再将Q网络的最新参数传递给目标网络[31]。
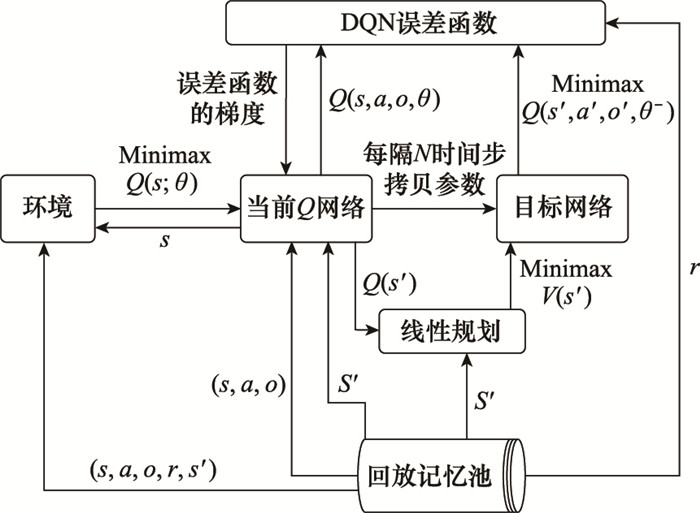
Minimax-DQN具体训练过程如图3所示。
图3
3.3 Minimax-DQN算法流程
总结上述内容给出Minimax-DQN的算法步骤如下。
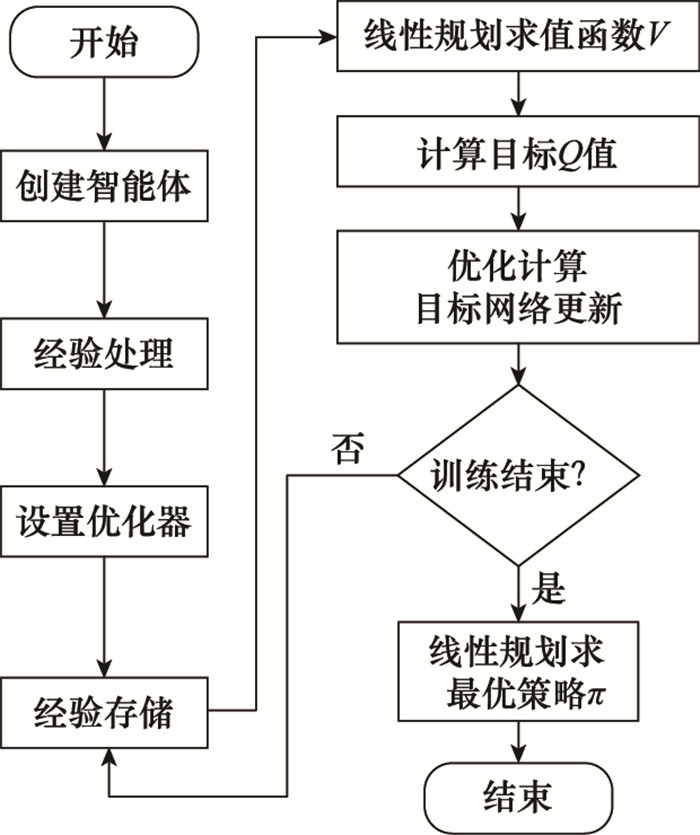
步骤1 初始化:给定红蓝双方一个初始状态,初始化记忆库,设置观察值。
步骤2 创建两个神经网络分别为Q网络和目标网络, Q网络参数为θ,目标网络参数θ-=θ。神经网络输入为状态s,输出为动作状态值函数Q,学习一定次数后,将Q网络的参数拷贝给目标网络。
循环遍历:
步骤3 红方智能体根据当前状态s按照策略π选择动作a并执行,得到下一状态s′以及获得的奖励r。观测蓝方智能体在状态s下选取的动作o,将{s, a, o, r, s′}五元组存储到记忆库中。依据空战态势的复杂多样性,设置记忆库存储上限为100 000组数据。
步骤4 从中记忆库中随机抽取256组数据作为一个训练样本。将训练样本的s′值作为神经网络的输入,根据神经网络输出得到状态s′下的Q(s′)。
步骤5 根据式(5)使用线性规划得到Minimax状态值V(s′),再根据式(8)计算出目标Q值target_q。
步骤6 计算损失函数
loss=(target_q-Q(s, a, o, θ))2,采用梯度下降法进行优化,更新Q网络参数。
循环结束
步骤7 根据式(5)使用训练好的神经网络输出的Q值进行线性规划求解得到最优策略π。
根据上述算法,可得到算法流程图如图4所示。
图4
4 仿真实验
假设红蓝双方处于同一高度水平,将仿真环境的空域范围限制在水平面内,横坐标x∈[-10 km, 10 km],纵坐标y∈[-10 km, 10 km],战机滚转角变化率
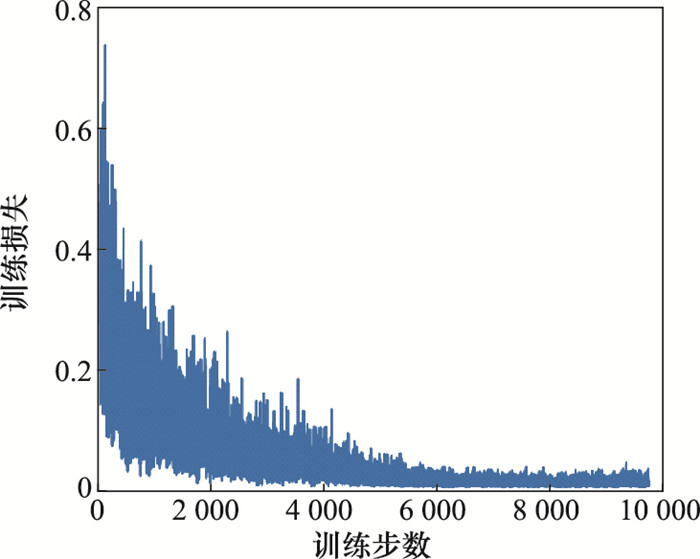
首先,红方根据Minimax-DQN算法选取策略,蓝方采用随机策略,若红方胜利则奖励值r=1,若蓝方胜利则r=-1,若飞出限定地图范围则r=0。训练10 000个回合后,停止神经网络的学习。图5为算法训练过程中的损失变化图,横坐标为训练步数,纵坐标为神经网络每次训练的损失,可以看出随着训练步数的增加,训练损失逐渐下降最终收敛趋近于0,满足了训练要求。
图5
训练完成后,红蓝双方根据价值网络得出各自策略进行1 000次博弈对抗,最终得到的博弈获胜结果如图6所示。
图6
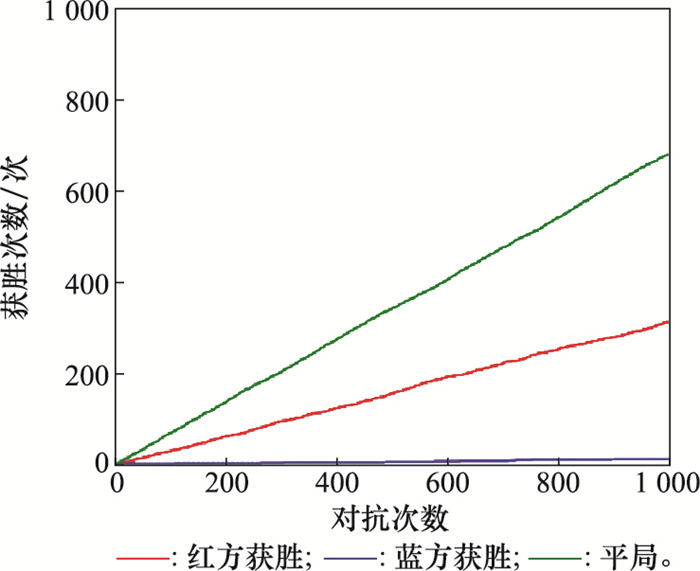
图6
Minimax-DQN对抗随机策略
Fig.6
Confrontation between Minimax-DQN and random strategy
实验结果中,采用Minimax-DQN算法的红方获胜次数为307次,采用随机策略的蓝方获胜12次,另外有681局平局。红方在对抗中取得了较为优秀的成绩,证明了算法在博弈条件下的可行性。需要注意的是,该算法的重点是利用了线性规划求出的Minimax值函数V去更新神经网络中的Q值。本文在同样的情景条件及相同网络参数情况下,红方采用传统DQN算法选取最优策略,蓝方采用随机策略,得到的博弈结果如图7所示。其中,采用DQN算法的红方获胜次数为212次,采用随机策略蓝方获胜15次,另外有773局平局。对比图6与图7可以看出,蓝方采用的随机策略对抗性较差,而Minimax-DQN和DQN两种算法都可以在博弈情景下生成对抗策略,但Minimax-DQN算法的胜率比DQN更高,说明该算法相较DQN算法能够更准确有效地作出决策,引导战机占领有利的态势位置。
图7
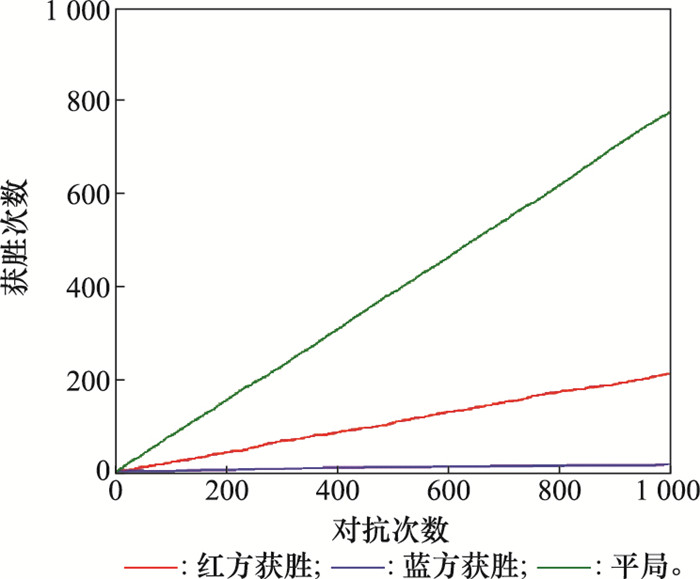
图8
接下来,将上述两种算法进行对抗比较,红方智能体采用Minimax-DQN算法训练后的网络生成策略,而蓝方智能体采取DQN算法生成策略进行博弈对抗1 000次,得到的博弈结果如下图9所示。
图9
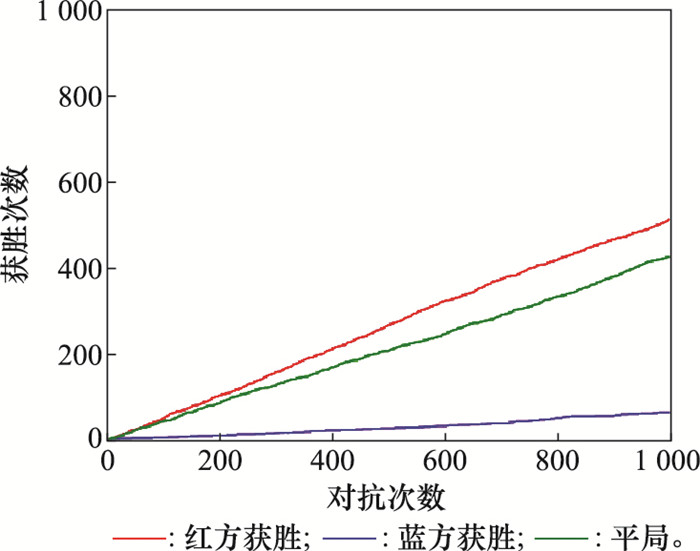
图10
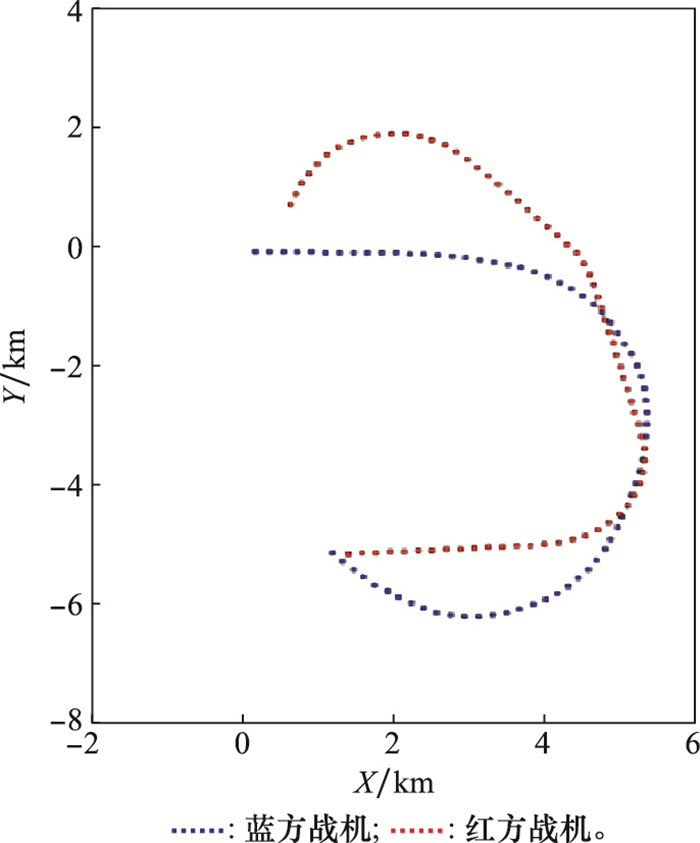
图10
红方随机态势下的博弈对抗轨迹
Fig.10
Game confrontation trajectory under the red random state
图11
为了测试4种典型初始态势下,红蓝双方的博弈对抗情况,进行了仿真测试如图12所示, 4组对局分别为红方优势对局、红方劣势对局、双方均势对局和双方中立对局。
图12
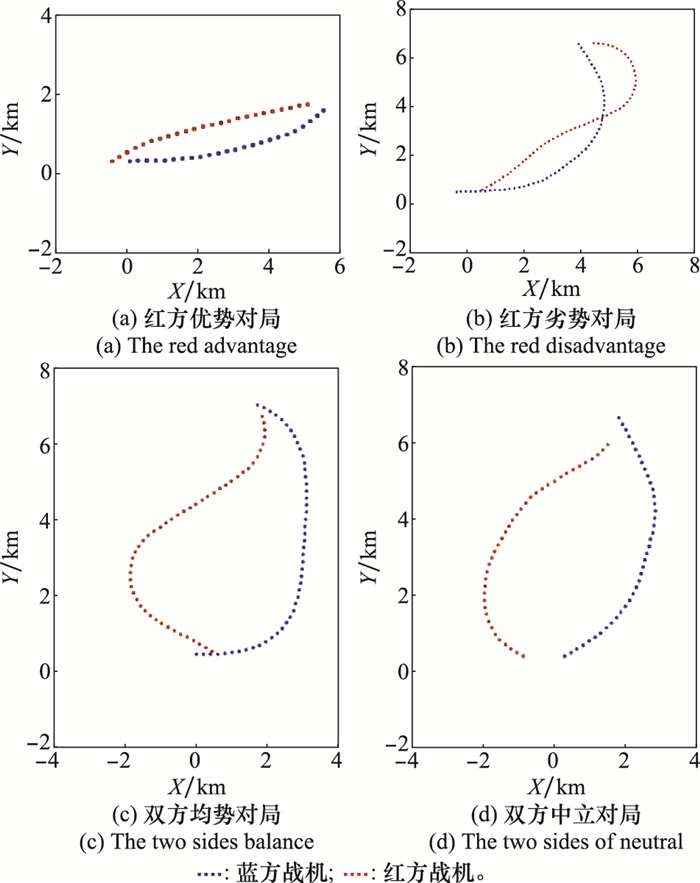
图12(a)中,红方战机初始坐标位于蓝方战机西方500 m处,航迹偏角φb=30°,两机距离小,红方战机达到攻击蓝机条件,红方处于优势。可以看出蓝方战机想掉头改变局势,但被红方战机利用初始位置的优势拦截,红方率先达到优势态势。图12(b)中,红方战机初始坐标位于蓝方战机东方500 m处,航迹偏角φb=30°,两机距离小,蓝方战机达到攻击红机条件,红方处于劣势。可以看出红方战机率先掉头改变局势,利用角度偏差最终扭转局面获得胜利。图12(c)中,红方战机初始坐标位于蓝方战机东方500 m处,航迹偏角φb=150°,两机距离小,双方均达到攻击对方条件,两机处于均势。红蓝双方同时转向,红方率先拉近距离并取得角度优势,最终获胜。图12(d)中红方战机初始坐标位于蓝方战机西方1 000 m处,航迹偏角φb=150°,两机距离大,双方均不满足攻击对方条件,两机处于均势。可以看出依旧是红方率先拉近距离,从左后方占据优势态势。
由4组仿真实验可以看出,红方能在任意初始态势下,利用决策最终占据有利态势,验证了算法的有效性。
结合上述仿真实验结果及对比分析, Minimax-DQN算法结合了博弈思想来更新神经网络值函数,具有较好的适应性和智能性,能够在博弈场景下准确地作出有效决策来引导战机占据有利的态势位置。
5 结论
本文采用深度强化学习与博弈相结合的方法,提出了一种可解决空战中红蓝双方战机对抗机动决策问题的算法,即Minimax-DQN算法。该算法利用深度学习神经网络来处理空战中战机高维连续的态势特征,并引入强化学习决策模型,通过与环境交互训练智能体,最后采用Minimax算法构建线性规划求解出纳什均衡策略,得到战机的最优机动决策。
目前本文通过空战仿真实验验证了算法的可行性,下一步的工作将加入高度影响,将仿真环境从二维拓展到三维,并考虑雷达和武器情况进行现代空战的研究,使算法适应更加复杂的战场环境,还将由一对一空战决策问题拓展到多对多的集群协同作战中的博弈智能问题研究。
参考文献
Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization
[J].
Modeling air combat by a moving horizon influence diagram game
[J].
Optimal fighter pursuit-evasion maneuvers found via two-sided optimization
[J].
A new approach to multi-aircraft air combat assignments
[J].DOI:10.1016/j.swevo.2012.03.003 [本文引用: 1]
基于博弈论的自由空战指挥引导对策问题研究
[J].
Study on countermeasure of free air combat command and guide based on game theory
[J].
基于近似动态规划与零和博弈的空战机动决策
[J].
Maneuver decision of air combat based on approximate dynamic programming and zero-sum game
[J].
基于马尔可夫网络的无人机机动决策方法研究
[J].
Research on UAV maneuver decision-making method based on markov network
[J].
基于进化式专家系统树的无人机空战决策技术
[J].
UAV air combat decision based on evolutionary expert system tree
[J].
基于矩阵对策与遗传算法的无人机空战决策
[J].
Study on air combat decision method of UAV based on matrix game and genetic algorithm
[J].
Mastering the game of Go without human knowledge
[J].
An introduction to deep reinforcement learning
[J].
A case study on air combat decision using approximated dynamic programming
[J].
Computing Nash equilibria through computational intelligence methods
[J].
Pursuit-evasion games in the presence of obstacles
[J].
Interactive visualization for testing Markov decision processes: MDPVIS
[J].
基于深度强化学习的UAV航路自主引导机动控制决策算法
[J].
Autonomous guidance maneuver control and decision-making algorithm based on deep reinforcement learning UAV route
[J].
Reinforcement learning of UCAV air combat based on maneuver prediction
[J].
Deep learning
[J].
Stochastic games
[J].
Air-combat strategy using approximate dynamic programming
[J].
第五代空空导弹的特点及关键技术
[J].
Characteristics and key technologies of the fifth generation of air to air missiles
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}