Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (10): 3218-3225.doi: 10.12305/j.issn.1001-506X.2023.10.26
• Guidance, Navigation and Control • Previous Articles
Robust control and mechanical-electrical-hydraulic joint simulation of spacecraft servo mechanism
Tao HU1, Liqun SHEN1,*, Jin FU2, Tianxiang FAN1
- 1. School of Instrument Science and Engineering, Harbin Institute of Technology, Harbin 150001, China
2. Capital Aerospace Machinery Corporation Limited, Beijing 100076, China
-
Received:2021-12-31Online:2023-09-25Published:2023-10-11 -
Contact:Liqun SHEN
CLC Number:
Cite this article
Tao HU, Liqun SHEN, Jin FU, Tianxiang FAN. Robust control and mechanical-electrical-hydraulic joint simulation of spacecraft servo mechanism[J]. Systems Engineering and Electronics, 2023, 45(10): 3218-3225.
share this article

Fig.1
Block diagram of nozzle servo control system"


Fig.2
Block diagram of nozzle servo system"

Table 1
Parameter table of the model"
| 参数 | 数值 | 参数 | 数值 | |
| Ke | 1.124 | ω0 | 386.900 | |
| Tv | 0.009 | ξ0 | 0.100 |

Fig.3
Mechanical assembly drawing of nozzle servo system"


Fig.4
Model diagram of the mechanical actuator of the missile nozzle after restraint"

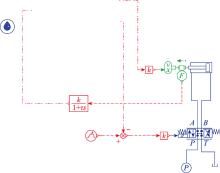
Fig.5
Hydraulic model of servo system"


Fig.6
Standard H∞ control diagram"


Fig.7
Augmented system block diagram"


Fig.8
Simulation platform construction of mechanical-electrical-hydraulic integration of nozzle servo system"


Fig.9
Mechanical-electrical-hydraulic joint simulation model of nozzle servo system"
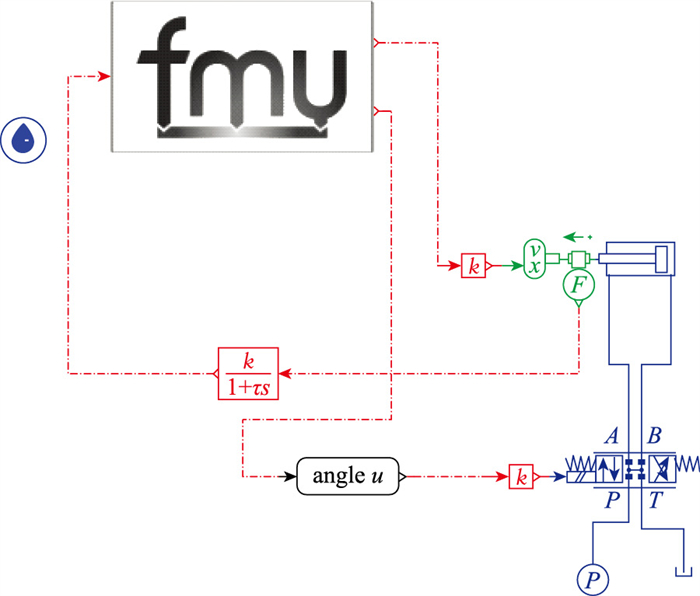

Fig.10
Simulink mechanical-electrical-hydraulic joint simulation model of nozzle servo system"


Fig.11
Step response of mechanical-electrical-hydraulic joint simulation system"


Fig.12
Hydraulic cylinder curves"

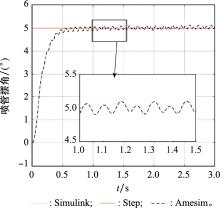
Fig.13
Nozzle swing angle step response curve"

| 1 | 周成宝, 周荻. 面向摆动喷管的导弹非线性姿态控制[J]. 系统工程与电子技术, 2016, 38 (5): 1107- 1113. |
| ZHOU C B , ZHOU D . Nonlinear attitude control of missiles oriented to swinging nozzles[J]. Systems Engineering and Electronics, 2016, 38 (5): 1107- 1113. | |
| 2 | 魏泽宇, 许文波, 张国林, 等. 航天机电伺服系统的自抗扰控制[J]. 控制理论与应用, 2021, 38 (1): 73- 80. |
| WEI Z Y , XU W B , ZHANG G L , et al. Active disturbance rejection control of aerospace electromechanical servo system[J]. Control Theory & Applications, 2021, 38 (1): 73- 80. | |
| 3 |
SUN W C , GAO H J , YAO B . Adaptive robust vibration control of full-car active suspensions with electrohydraulic actuators[J]. IEEE Trans.on Control Systems Technology, 2013, 21 (6): 2417- 2422.
doi: 10.1109/TCST.2012.2237174 |
| 4 | ZHAO S D , WANG J , WANG L , et al. Iterative learning control of electro-hydraulic proportional feeding system in slotting machine for metal bar cropping[J]. International Journal of Machine Tools & Manufacture, 2005, 45 (7): 923- 931. |
| 5 |
SUN G F , LIU J . Dynamic responses of hydraulic crane during luffing motion[J]. Mechanism and Machine Theory, 2006, 41 (11): 1273- 1288.
doi: 10.1016/j.mechmachtheory.2006.01.008 |
| 6 | LYNN A, SMID E, ESHRAGHI M, et al. Modeling hydraulic regenerative hybrid vehicles using AMESim and Matlab/Simulink[C]//Proc. of the SPIE. International Society for Optical Engineering, 2005: 24-40. |
| 7 |
LIU C Q , JIANG Y F , ZHANG Z Z , et al. Research on electro-hydraulic servo system of air rudder on model reference adaptive control[J]. Journal of Physics: Conference Series, 2020, 1650 (2): 022001.
doi: 10.1088/1742-6596/1650/2/022001 |
| 8 | 付永领, 朱承建. 基于AMEsim软件的大负载电液位置伺服系统分析及仿真[J]. 机床与液压, 2007, 35 (8): 210-211, 242. |
| FU Y L , ZHU C J . Heavy load electric and hydraulic position servo system analysis and simulation based on AMEsim[J]. Machine Tool & Hydraulics, 2007, 35 (8): 210-211, 242. | |
| 9 |
何星星, 廖瑛, 唐凯. 基于一体化建模技术的液压舵机动力学仿真分析[J]. 弹箭与制导学报, 2012, 32 (4): 9-12, 22.
doi: 10.3969/j.issn.1673-9728.2012.04.003 |
|
HE X X , LIAO Y , TANG K . Simulation analysis of hydraulic servo dynamics based on integrated modeling technology[J]. Journal of Projectiles, Arrows and Guidance, 2012, 32 (4): 9-12, 22.
doi: 10.3969/j.issn.1673-9728.2012.04.003 |
|
| 10 | SEBASTIAN A, THOMAS P, ALEX S. Servo design and analysis of thrust vector control of launch vehicle[C]//Proc. of the IEEE Innovations in Power and Advanced Computing Technologies, 2017. |
| 11 |
WANG X , SUN Q . Consistency check of degradation mechanism between natural storage and enhancement test for missile servo system[J]. Journal of Systems Engineering and Electro-nics, 2019, 30 (2): 415- 424.
doi: 10.21629/JSEE.2019.02.19 |
| 12 | 范天祥. 导弹伺服系统虚拟样机仿真与验证[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| FAN T X. Simulation and verification of virtual prototype of missile servo system[D]. Harbin: Harbin Institute of Techno-logy, 2020. | |
| 13 |
ZHANG B , XU B , XIA C L , et al. Modeling and simulation on axial piston pump based on virtual prototype technology[J]. Chinese Journal of Mechanical Engineering, 2009, 22 (1): 84- 90.
doi: 10.3901/CJME.2009.01.084 |
| 14 |
ZHEN Z , LIU C Y , ZHANG Y K , et al. The combined simulation of high-speed parallel manipulator based on Matlab, SolidWorks and ADAMS[J]. Applied Mechanics and Mate-rials, 2014, 716-717, 1578- 1581.
doi: 10.4028/www.scientific.net/AMM.716-717.1578 |
| 15 |
WANG X R , SONG W , XUE T , et al. Dynamics analyses of rigid-flexible coupling of spot-welding robot[J]. Journal of Advanced Manufacturing Systems, 2020, 19 (4): 855- 867.
doi: 10.1142/S0219686720500407 |
| 16 |
QIAO G , LIU G , SHI Z H , et al. A review of electromechanical actuators for more/all electric aircraft systems[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2018, 232 (22): 4128- 4151.
doi: 10.1177/0954406217749869 |
| 17 |
MAO P J , ZHANG F , ZHANG G Y . Data exchange method between ADAMS, CATIA and Solid Works software[J]. App-lied Mechanics and Materials, 2011, 143-144, 422- 427.
doi: 10.4028/www.scientific.net/AMM.143-144.422 |
| 18 |
LI F , WANG K , MA C L , et al. Dynamic modeling and tracking control simulation for large electro-hydraulic servo system[J]. Applied Mechanics and Materials, 2013, 416-417, 811- 816.
doi: 10.4028/www.scientific.net/AMM.416-417.811 |
| 19 | MENG Y D, GAN H Y, YAN Y, et al. Research on a typical electro-hydraulic servo system simulation[C]//Proc. of the IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference, 2021: 1325-1328. |
| 20 | LI C X, CHEN H B. Adaptive robust control for electro-hydraulic servo system of a projectile transfer arm[C]//Proc. of the 4th International Conference on Automation, Control and Robotics Engineering, 2019: 68. |
| 21 |
NGUYEN M H , DAO H V , AHN K K . Active disturbance rejection control for position tracking of electro-hydraulic servo systems under modeling uncertainty and external load[J]. Actuators, 2021, 10 (2): 20.
doi: 10.3390/act10020020 |
| 22 | ZHU H L , MOK H S , LEE H G , et al. Controller design of BLDC motor fin position servo system by employing H-infinity loop shaping method[J]. The Transactions of the Korean Institute of Power Electronics, 2019, 24 (1): 49- 55. |
| 23 | SU S J , ZHU Y Y , LI C J , et al. Dual-valve parallel prediction control for an electro-hydraulic servo system[J]. Science Progress, 2020, 103 (1): 1- 21. |
| 24 |
KISAKA M . Design of sensitivity function of multirate VCM control system[J]. Electrical Engineering in Japan, 2013, 185 (4): 53- 59.
doi: 10.1002/eej.22296 |
| 25 | YANG G C . Dual extended state observer-based backstepping control of electro-hydraulic servo systems with time-varying output constraints[J]. Transactions of the Institute of Mea-surement and Control, 2020, 42 (5): 1070- 1080. |
| 26 | CHENG C , LIU S Y , WU H Z . Sliding mode observer-based fractional-order proportional-integral-derivative sliding mode control for electro-hydraulic servo systems[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020, 234 (10): 1887- 1898. |
| 27 | MENG Z W , ZHANG T Z , ZHANG H X , et al. Energy management strategy for an electromechanical-hydraulic coupled power electric vehicle considering the optimal speed threshold[J]. Energies, 2021, 14 (17): 5300. |
| 28 | BUENO B , STREET M , PFLUG T , et al. A co-simulation modelling approach for the assessment of a ventilated double-skin complex fenestration system coupled with a compact fan-coil unit[J]. Energy & Buildings, 2017, 151, 18- 27. |
| 29 | DAD C , TAVELLA J P , VIALLE S . Synthesis and feedback on the distribution and parallelization of FMI-CS-based co-simulations with the DACCOSIM platform[J]. Parallel Computing, 2021, 106, 102802. |
| 30 | NEGRI E , FUMAGALLI L , CIMINO C , et al. FMU-supported simulation for CPS digital twin[J]. Procedia Manufacturing, 2019, 28, 201- 206. |
| [1] | Jinyan GAO, Luyuan WANG, Zhongshi PAN, Humei WANG. MBSE architecture modeling of Mars maintenance and management device [J]. Systems Engineering and Electronics, 2023, 45(5): 1441-1450. |
| [2] | Xinfeng WU, Qibo PENG, Ran HUANG, Jinglin LI. Escape and rescue strategy of launch vehicle ascending section based on MBSE [J]. Systems Engineering and Electronics, 2023, 45(4): 1121-1126. |
| [3] | Hongchen JIAO, Yong LEI, Hongyu ZHANG, Guobin ZHANG, Yaodong WANG. Research on modeling and design method of spacecraft system based on MBSE [J]. Systems Engineering and Electronics, 2021, 43(9): 2516-2525. |
| [4] | Bing HUA, Yingying LIANG, Rui NI. Spacecraft integrated attitude determination method based on improved factor graph model [J]. Systems Engineering and Electronics, 2021, 43(8): 2273-2281. |
| [5] | Xue SUN, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavior decision method of autonomous vehicle based on ontology and BN [J]. Systems Engineering and Electronics, 2021, 43(2): 452-465. |
| [6] | Kaibai CHEN, Min GAO, Xiaodong ZHOU, Cheng CHENG. Front-door coupling effect of ultra-wideband electromagnetic pulse for FMCW fuze [J]. Systems Engineering and Electronics, 2020, 42(3): 528-535. |
| [7] | Kaibai CHEN, Xiaodong ZHOU, Min GAO, Yuqing FAN. Research on UWB-HPM effect of RF front-end of millimeter wave fuze [J]. Systems Engineering and Electronics, 2020, 42(2): 284-291. |
| [8] | FU Jiangliang, GAN Qingbo, ZHANG Yang, ZHAO Kexin, YUAN Hong. NTSM based kinematically coupled motion control for spacecraft’s feature points staring and tracking [J]. Systems Engineering and Electronics, 2019, 41(7): 1623-1632. |
| [9] | DONG Chaoyang, MA Mingyu, WANG Qing, ZHOU Min. Attitude cooperative control of multiple spacecraft on SO(3) with communication time-delay [J]. Systems Engineering and Electronics, 2018, 40(9): 2032-2039. |
| [10] | WANG Jianjun, XIANG Yongqing, ZHAO Ning. Spacecraft system engineering development management platform based on lean and collaborative concept [J]. Systems Engineering and Electronics, 2018, 40(6): 1310-1317. |
| [11] | JIN Jian, CHEN Bohan. Analysis on control strategies of CO2 partial pressure of manned spacecraft assemble with multi-cabins [J]. Systems Engineering and Electronics, 2018, 40(6): 1351-1357. |
| [12] | LI Xing-qian, WEI Chuan-feng, ZHANG Wei, XIA Qiao-li, LI Tao. On-orbit maintainability design system for manned spacecraft [J]. Systems Engineering and Electronics, 2016, 38(1): 84-89. |
| [13] | XU Zheyao, QI Naiming, SUN Qilong, WANG Tianye. Automatic mass balancing of threeaxis rotational spacecraft simulator [J]. Systems Engineering and Electronics, 2015, 37(5): 1124-1132. |
| [14] | HUANG Pu, QIAN Shan, XIE Xin, SUN Shouming. Dynamic relative positioning algorithm for maneuvering spacecraft#br# based on strong tracking filter [J]. Systems Engineering and Electronics, 2015, 37(5): 1140-1145. |
| [15] | HAN Weihua1, GAN Qingbo2, CHEN Xianfeng1, ZHU Zhengfan2. Platform control for removing geostationary earth orbit#br# debris of spacecraftbased laser [J]. Systems Engineering and Electronics, 2015, 37(10): 2352-2351. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||