Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (10): 3207-3217.doi: 10.12305/j.issn.1001-506X.2023.10.25
• Guidance, Navigation and Control • Previous Articles
A monocular visual inertial odometry based on structural features
Liping YAN1,*, Chengwei LI1, Bokai XU1, Yuanqing XIA1, Bo XIAO2
- 1. School of Automation, Beijing Institute of Technology, Beijing 100081, China
2. School of Artificial Intelligence, Beijing University of Posts and Telecommunications, Beijing 100876, China
-
Received:2022-08-17Online:2023-09-25Published:2023-10-11 -
Contact:Liping YAN
CLC Number:
Cite this article
Liping YAN, Chengwei LI, Bokai XU, Yuanqing XIA, Bo XIAO. A monocular visual inertial odometry based on structural features[J]. Systems Engineering and Electronics, 2023, 45(10): 3207-3217.
share this article

Fig.1
VIO framework based on structural features"
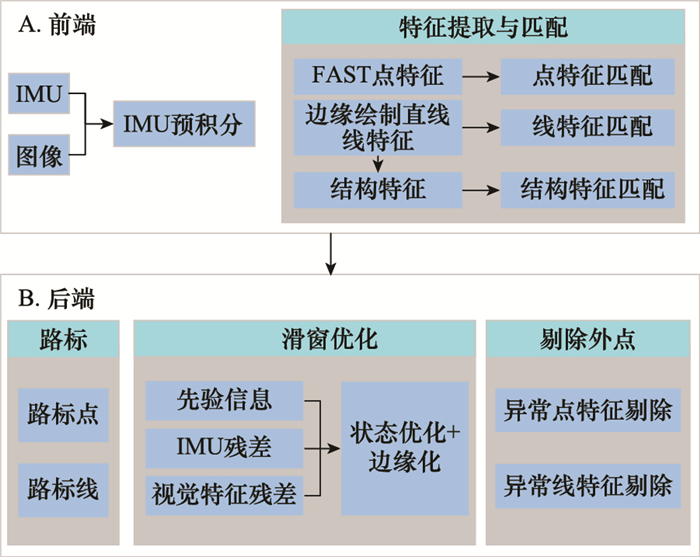

Fig.2
Mismatched line segment"
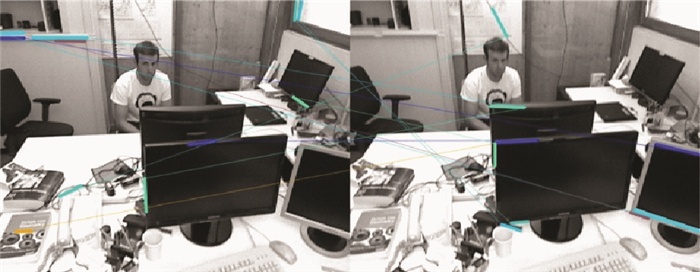
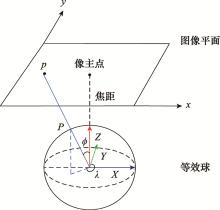
Fig.3
Equivalent sphere"

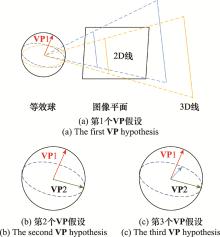
Fig.4
VP extraction process"
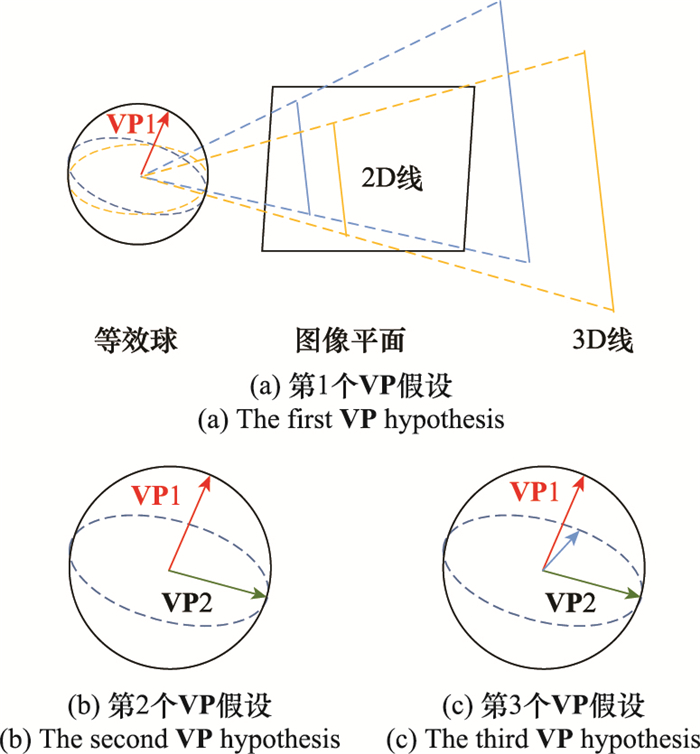
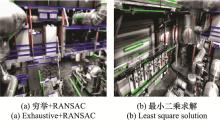
Fig.5
Structural lines corresponding to structural features extracted by different algorithms"
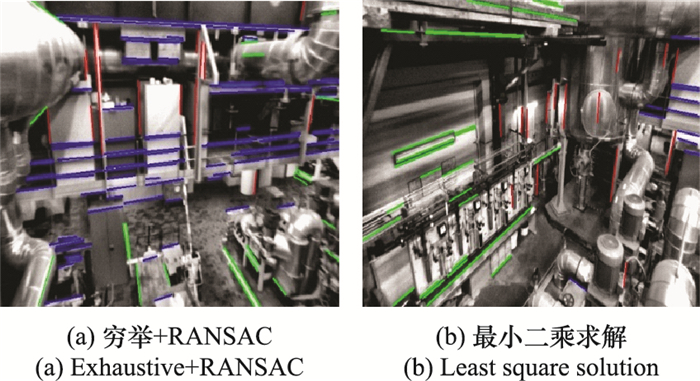

Fig.6
Sequence V1_01_easy structural features extracted from a frame image"
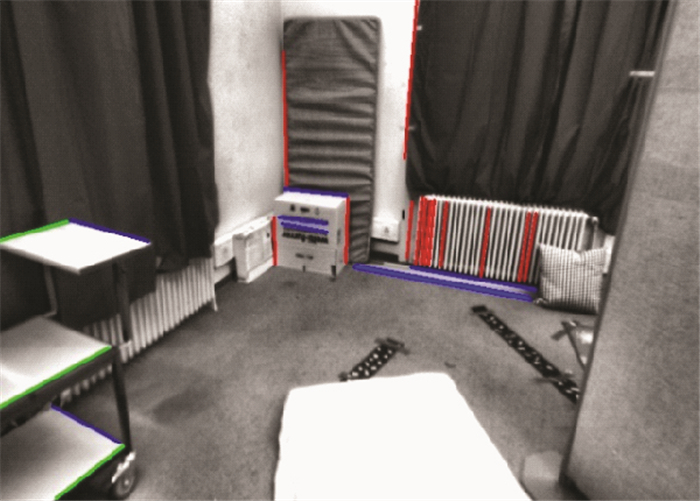

Fig.7
Error between MF-VIO and FMF-VIO on dataset MH_02_easy"

Fig.8
Error between MF-VIO and FMF-VIO on dataset MH_04_difficult"
Table 1
Root mean square error of piston and rotation"
| 序列 | OpenVINS | PL-VIO | MF-VIO | FMF-VIO | |||||||
| 平移/m | 旋转/rad | 平移/m | 旋转/rad | 平移/m | 旋转/rad | 平移/m | 旋转/rad | ||||
| MH_01_easy | / | / | 0.139 7881 | 0.026 952 | 0.172 3642 | 0.024 5442 | 0.175 494 | 0.023 9751 | |||
| MH_02_easy | / | / | 0.141 971 | 0.043 020 | 0.136 8332 | 0.038 5541 | 0.136 2591 | 0.038 8872 | |||
| MH_03_medium | / | / | 0.264 665 | 0.042 052 | 0.260 5641 | 0.037 9341 | 0.263 4432 | 0.038 8712 | |||
| MH_04_difficult | / | / | 0.362 234 | 0.040 540 | 0.329 1412 | 0.039 5931 | 0.325 9931 | 0.039 6552 | |||
| MH_05_ difficult | / | / | 0.277 990 | 0.026 338 | 0.269 9911 | 0.025 4512 | 0.270 5852 | 0.022 9421 | |||
| V1_01_easy | 0.0641 | 0.020 9261 | 0.079 288 | 0.143 704 | 0.068 9541 | 0.141 5902 | 0.070 522 | 0.141 952 | |||
| V1_03_difficult | 0.202 | 0.103 5682 | 0.202 742 | 0.085 312 | 0.114 1081 | 0.112 057 | 0.181 2052 | 0.082 7371 | |||
| V2_01_easy | 0.073 | 0.027 6631 | 0.087 473 | 0.053 186 | 0.059 3902 | 0.029 635 | 0.058 8551 | 0.029 3662 | |||
| V2_02_medium | 0.0791 | 0.041 3641 | 0.147 834 | 0.073 4792 | 0.141 0452 | 0.077 073 | 0.141 081 | 0.077 313 | |||
| V2_03_ difficult | / | / | 0.308 307 | 0.077 721 | 0.214 9721 | 0.037 3351 | 0.257 5712 | 0.044 2542 | |||
Table 2
Real time display of VP extraction algorithm ms"
| 序列 | MF | GMF | G2MF |
| MH_01_easy | 63.320 76 | 12.049 29 | 9.625 10 |
| MH_02_easy | 59.049 39 | 13.145 60 | 8.789 46 |
| MH_03_ medium | 57.212 60 | 11.961 64 | 9.586 75 |
| MH_04_difficult | 58.012 88 | 11.695 74 | 8.921 13 |
| MH_05_ difficult | 57.783 94 | 12.289 53 | 8.775 61 |
| V1_01_easy | 58.892 84 | 10.977 85 | 8.411 83 |
| V1_03_difficult | 56.624 59 | 10.368 42 | 9.129 10 |
| V2_01_easy | 56.284 12 | 9.939 593 | 9.404 82 |
| V2_02_medium | 58.044 27 | 11.710 93 | 9.303 44 |
| V2_03_ difficult | 58.629 07 | 10.307 59 | 9.595 35 |
Table 3
Average execution time per frame of PL-VIO and FMF-VIO different units ms"
| 模型 | 操作 | PL-VIO | FMF-VIO |
| 前端 | 点特征提取与匹配 | 18.729 40 | 17.150 06 |
| 线段特征提取与匹配 | 122.447 10 | 36.727 67 | |
| 结构特征提取与匹配 | - | 8.775 61 | |
| 后端 | 非线性优化 | 30.827 74 | 33.498 91 |
| 边缘化 | 5.100 24 | 8.137 24 |
| 1 | 陈凤东, 洪炳镕. 基于特征地图的移动机器人全局定位与自主泊位方法[J]. 电子学报, 2010, 38 (6): 1256- 1261. |
| CHEN F D , HONG B R . A global localization and self-docking method for mobile robot based on feature map[J]. Acta Electronica Sinica, 2010, 38 (6): 1256- 1261. | |
| 2 | 王晓龙, 刘海颖, 王景琪. 基于分层SLAM的空地多智能体协同导航[J]. 系统工程与电子技术, 2020, 42 (1): 166- 171. |
| WANG X L , LIU H Y , WANG J Q . Collaborative navigation of air-ground multi-agent based on hierarchical SLAM[J]. Systems Engineering and Electronics, 2020, 42 (1): 166- 171. | |
| 3 |
陈宝华, 邓磊, 陈志祥, 等. 基于即时稠密三维重构的无人机视觉定位[J]. 电子学报, 2017, 45 (6): 1294- 1300.
doi: 10.3969/j.issn.0372-2112.2017.06.003 |
|
CHEN B H , DENG L , CHEN Z X , et al. Instant dense 3D reconstruction-based UAV vision localization[J]. Acta Electronica Sinica, 2017, 45 (6): 1294- 1300.
doi: 10.3969/j.issn.0372-2112.2017.06.003 |
|
| 4 | 王通典, 刘洁瑜, 吴宗收, 等. 基于多尺度光流融合特征点视觉-惯性SLAM方法[J]. 系统工程与电子技术, 2022, 44 (3): 977- 985. |
| WANG T D , LIU J Y , WU Z S , et al. Visual-inertial SLAM method based on multi-scale optical flow fusion feature point[J]. Systems Engineering and Electronics, 2022, 44 (3): 977- 985. | |
| 5 |
GUI J J , GU D B , WANG S , et al. A review of visual inertial odometry from filtering and optimisation perspectives[J]. Advanced Robotics, 2015, 29 (20): 1289- 1301.
doi: 10.1080/01691864.2015.1057616 |
| 6 | ZUO X X, XIE X J, LIU Y, et al. Robust visual SLAM with point and line features[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017: 1775-1782. |
| 7 |
HE Y J , ZHAO J , GUO Y , et al. PL-VIO: tightly coupled monocular visual-inertial odometry using point and line features[J]. Sensors, 2018, 18 (4): 1-25, 1159.
doi: 10.1109/JSEN.2017.2782543 |
| 8 | 赵良玉, 金瑞, 朱叶青, 等. 基于点线特征融合的双目惯性SLAM算法[J]. 航空学报, 2021, 42 (12): 325117. |
| ZHAO L Y , JIN R , ZHU Y Q , et al. Stereo visual-inertial SLAM with point and line features[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (12): 325117. | |
| 9 | LEE G H, FRAUNDORFER F, POLLEFEYS M. MAV visual SLAM with plane constraint[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 3139-3144. |
| 10 | 李海丰, 胡遵河, 陈新伟. PLP-SLAM: 基于点、线、面特征融合的视觉SLAM方法[J]. 机器人, 2017, 39 (2): 214- 220. |
| LI H F , HU Z H , CHEN X W . PLP-SLAM: a visual SLAM method based on point-line-plane feature fusion[J]. Robot, 2017, 39 (2): 214- 220. | |
| 11 | 孙沁璇, 苑晶, 张雪波, 等. PLVO: 基于平面和直线融合的RGB-D视觉里程计[J]. 自动化学报, 2023, 49 (10): 1001- 1013. |
| SUN Q X , YUAN J , ZHANG X B , et al. PLVO: plane-line-based RGB-D visual odometry[J]. Acta Automatica Sinica, 2023, 49 (10): 1001- 1013. | |
| 12 | CAMPOSECO F, POLLEFEYS M. Using vanishing points to improve visual-inertial odometry[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2015: 5219-5225. |
| 13 | KIM P, COLTIN B. Low-drift visual odometry in structured environments by decoupling rotational and translational motion[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2018: 7247-7253. |
| 14 |
GUO R , PENG K , ZHOU D , et al. Robust visual compass using hybrid features for indoor environments[J]. Electronics, 2019, 8 (2): 220.
doi: 10.3390/electronics8020220 |
| 15 | KNEIP L, WEISS S, SIEGWART R. Deterministic initialization of metric state estimation filters for loosely-coupled mono-cular vision-inertial systems[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 2235-2241. |
| 16 | WEISS S, SIEGWART R. Real-time metric state estimation for modular vision-inertial systems[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 4531-4537. |
| 17 |
BLOESCH M , BURRI M , OMARI S , et al. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback[J]. The International Journal of Robotics Research, 2017, 36 (10): 1053- 1072.
doi: 10.1177/0278364917728574 |
| 18 | LEUTENEGGER S , LYNEN S , BOSSE M , et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34 (3): 314- 334. |
| 19 | LI M , MOURIKIS A I . High-precision, consistent EKF-based visual-inertial odometry[J]. The International Journal of Robotics Research, 2013, 32 (6): 690- 711. |
| 20 | BLOESCH M , BURRI M , OMARI S , et al. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback[J]. The International Journal of Robotics Research, 2017, 36 (10): 1053- 1072. |
| 21 | LEUTENEGGER S , LYNEN S , BOSSE M , et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34 (3): 314- 334. |
| 22 | CAMPOS C , ELVIRA R , RODRÍGUEZ J J G , et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Trans.on Robotics, 2021, 37 (6): 1874- 1890. |
| 23 | FORSTER C , CARLONE L , DELLAERT F , et al. On-Manifold preintegration for real-time visual-inertial odometry[J]. IEEE Trans.on Robotics, 2017, 33 (1): 1- 21. |
| 24 | LU X H, J Y Y, LI H, et al. 2-Line exhaustive searching for real-time vanishing point estimation in Manhattan world[C]// Proc. of the IEEE Winter Conference on Applications of Computer Vision, 2017: 345-353. |
| 25 | BAZIN J C , DEMONCEAUX C , VASSEUR P , et al. Rotation estimation and vanishing point extraction by omnidirectional vision in urban environment[J]. The International Journal of Robotics Research, 2012, 31 (1): 63- 81. |
| 26 | DENIS P, ELDER J H, ESTRADA F J. Efficient edge based methods for estimating Manhattan frames in urban imagery[C]//Proc. of the European Conference on Computer Vision, 2008: 97-210. |
| 27 | BAZIN J C, POLLEFEYS M. 3-line RANSAC for orthogonal vanishing point detection[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012: 4282-4287. |
| 28 | MIRZAEI F M, ROUMELIOTIS S I. Optimal estimation of vanishing points in a manhattan world[C]// Proc. of the IEEE International Conference on Computer Vision, 2011: 2454-2461. |
| 29 | WILDENAUER H, HANBURY A. Robust camera self-calibration from monocular images of Manhattan worlds[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2012: 2831-2838. |
| 30 | TRETYAK E, BARINOVA O, KOHLI P, et al. Geometric image parsing in man-made environments[C]//Proc. of the International Journal of Computer Vision, 2012, 97(3): 305-321. |
| 31 | ZHOU H Z , ZOU D P , PEI L , et al. StructSLAM: visual SLAM with building structure lines[J]. IEEE Trans.on Vehi-cular Technology, 2015, 64 (4): 1364- 1375. |
| 32 | ZOU D P , WU Y X , PEI L , et al. StructVIO: visual-inertial odometry with structural regularity of man-made environments[J]. IEEE Trans.on Robotics, 2019, 35 (4): 999- 1013. |
| 33 | GOMEZ-OJEDA R , MORENO F A , ZUNIGA-NOEL D , et al. PL-SLAM: a stereo SLAM system through the combination of points and line segments[J]. IEEE Trans.on Robotics, 2019, 35 (3): 734- 746. |
| 34 | LI H A, YAO J, BAZIN J, et al. A monocular SLAM system leveraging structural regularity in Manhattan world[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2018: 2518-2525. |
| 35 | KIM P, COLTIN B. Low-drift visual odometry in structured environments by decoupling rotational and translational motion[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2018: 7247-7253. |
| 36 | LUCAS B, KANADE T. An iterative image registration technique with an application to stereo vision[C]//Proc. of the International Joint Conference on Artificial Intelligence, 1981: 674-679. |
| 37 | AKINLAR C , TOPAL C . EDLINES: a real-time line segment detector with a false detection control[J]. Pattern Recognition Letters, 2011, 32 (13): 1633- 1642. |
| 38 | QIN T , LI P , SHEN S J . VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Trans.on Robotics, 2018, 34 (4): 1004- 1020. |
| 39 | BARTOLI A , STURM P . Structure-from-motion using lines: representation, triangulation, and bundle adjustment[J]. Computer Vision and Image Understanding, 2005, 100 (3): 416- 441. |
| 40 | BURRI M , NIKOLIC J , GOHL P , et al. The EuRoC micro aerial vehicle datasets[J]. International Journal of Robotics Research, 2016, 35 (10): 1157- 1163. |
| 41 | GENEVA P, ECKENHOFF K, LEE W, et al. Openvins: a research platform for visual-inertial estimation[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020: 4666-4672. |
| [1] | Keke LU, Chao WANG, Junfeng WU, Feng QIAN. Visual-inertial odometry based on exposure controlled by gradient information [J]. Systems Engineering and Electronics, 2023, 45(5): 1496-1502. |
| [2] | Guofeng ZHOU, Zhe CHEN, Rui LYU, Haifeng TU, Shan XU. Virtual IMU and turntable attitude compensation for HITL simulation [J]. Systems Engineering and Electronics, 2022, 44(4): 1329-1335. |
| [3] | Tongdian WANG, Jieyu LIU, Zongshou WU, Qiang SHEN, Erliang YAO. Visual-inertial SLAM method based on multi-scale optical flow fusion feature point [J]. Systems Engineering and Electronics, 2022, 44(3): 977-985. |
| [4] | Lei YANG, Huijuan LI, Bo HUANG, Wei LIU, Pucheng LI. High resolution SAR imagery with structural feature enhancement under two-layer sparse group Lasso [J]. Systems Engineering and Electronics, 2021, 43(2): 351-362. |
| [5] | Leiyu CHEN, Zhijie ZHOU, Shuaiwen TANG, You CAO. Weapon equipment performance evaluation method with multi-information fusion [J]. Systems Engineering and Electronics, 2020, 42(7): 1527-1533. |
| [6] | Yueyang BEN, Xiaofeng WEI, Qianqian GAO, Xianpeng ZHAO, Ping'an DAI, Yan SUN. Error analysis and compensation based on ship heave measurement of SINS [J]. Systems Engineering and Electronics, 2020, 42(7): 1590-1596. |
| [7] | Xinhao DONG, Zhijie ZHOU, Youmin ZHANG, Zhichao FENG, You CAO. Forecasting method of the error coefficient for SIMU based on belief rule base [J]. Systems Engineering and Electronics, 2020, 42(12): 2867-2874. |
| [8] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [9] | WEI Heng, L Qiang, LIN Huican, ZHANG Yang, LIANG Jian. Survey on multi-robot SLAM back-end optimization algorithm [J]. Systems Engineering and Electronics, 2017, 39(11): 2553-2565. |
| [10] | DONG Chun-mei, REN Shun-qing, CHEN Xi-jun. IMU calibration method based on analysis for the errors of three-axis turntable [J]. Systems Engineering and Electronics, 2016, 38(4): 895-901. |
| [11] | LIU Dan, DUAN Jianmin, YU Hongxiao. FastSLAM algorithm based on adaptive fading extended Kalman filter [J]. Systems Engineering and Electronics, 2016, 38(3): 644-651. |
| [12] | PEI Fu-jun, CHENG Yu-hang, LI Hao-yang, JU He-hua. Distributed simultaneous localization and mapping algorithm based on partition of space-region [J]. Systems Engineering and Electronics, 2015, 37(3): 639-645. |
| [13] | LIU Ming-yong, DONG Ting-ting, ZHANG Li-chuan. Underwater SLAM navigation algorithm based on random beacons [J]. Systems Engineering and Electronics, 2015, 37(12): 2830-2834. |
| [14] | XIA Wei-xing, YANG Xiao-dong. High accuracy estimation algorithm for IMU error of under water INS [J]. Systems Engineering and Electronics, 2013, 35(10): 2176-2185. |
| [15] | DU Hang-yuan, ZHAO Yu-xin, YANG Yong-peng, HAN Qing-nan. SLAM algorithm based on random finite set [J]. Journal of Systems Engineering and Electronics, 2012, 34(7): 1452-1457. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||