Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (8): 2570-2577.doi: 10.12305/j.issn.1001-506X.2023.08.32
• Guidance, Navigation and Control • Previous Articles Next Articles
Predefined-time adaptive control for heavy-lift launch vehicles
Yushi JIANG1,*, Yang CHEN1, Lu GAO1, Ligen CAI1, Jixing LYU2
- 1. Beijing Institute of Space Long March Vehicle, Beijing 100076, China
2. School of Astronautics, Harbin Institute of Technology, Harbin 150006, China
-
Received:2022-04-06Online:2023-07-25Published:2023-08-03 -
Contact:Yushi JIANG
CLC Number:
Cite this article
Yushi JIANG, Yang CHEN, Lu GAO, Ligen CAI, Jixing LYU. Predefined-time adaptive control for heavy-lift launch vehicles[J]. Systems Engineering and Electronics, 2023, 45(8): 2570-2577.
share this article
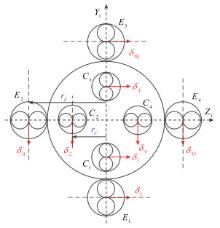
Fig.1
Layout diagram of the heavy-lift launch vehicle engines"
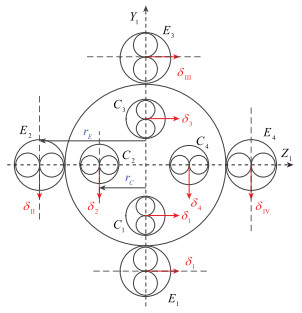

Fig.2
Structural block diagram of the predefined-time adaptive controller for heavy-lift launch vehicles"
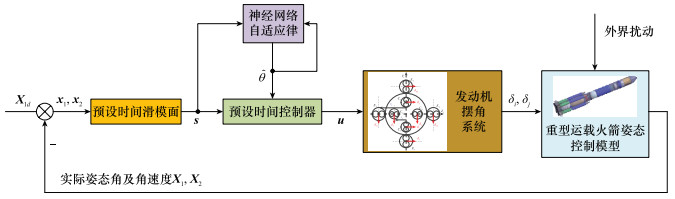
Table 1
Simulation parameter setting of the controller"
| 组成项 | 参数值 |
| 滑模面 | γ1=7, γ2=9, ε=0.01 |
| 控制器 |
Table 2
Simulation parameter setting of the contrast controllers"
| 对比控制器 | 参数值 |
| FTC | λm=2, km2=2, km3=2, km3=1, km4=1, qn1=9, pn1=7, qn2=9, pn2=5, an1=2 |
| FxTC | an2=1, λn=8, mn1=9, nn1=5, mn2=5, nn2=3, bn1=2, bn2=1, τn=0.1 |
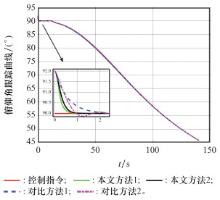
Fig.3
Tracking curves of the pitch angle"
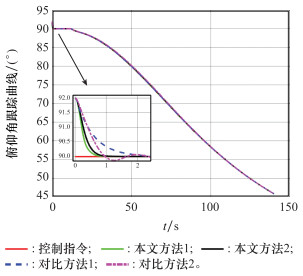
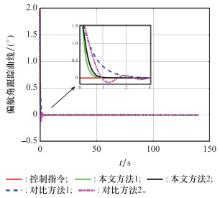
Fig.4
Tracking curves of the yaw angle"
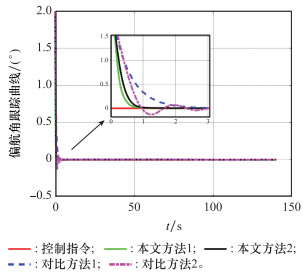
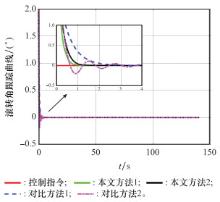
Fig.5
Tracking curves of the roll angle"
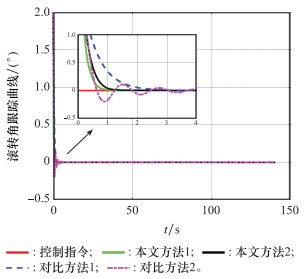
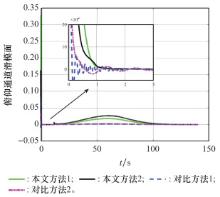
Fig.6
Sliding mode surface variation curves of the pitch channel"
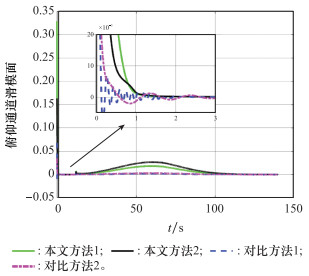
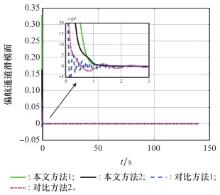
Fig.7
Sliding mode surface variation curves of the yaw channel"
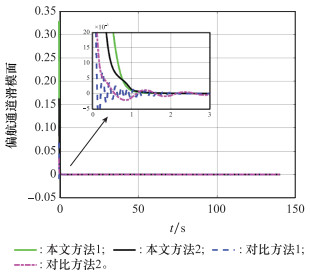
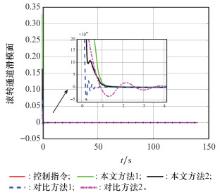
Fig.8
Sliding mode surface variation curves of the roll channel"
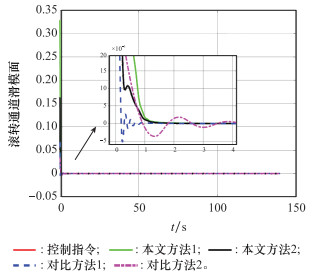
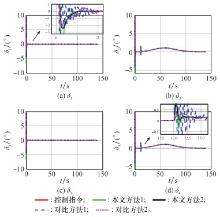
Fig.9
Swing angle variation curves of the core stage engines"
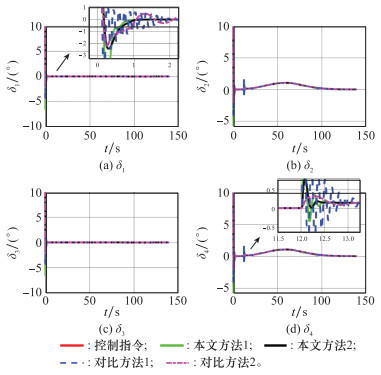
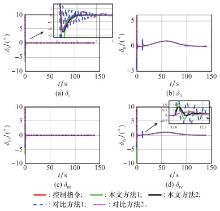
Fig.10
Swing angle variation curves of the booster stage engines"
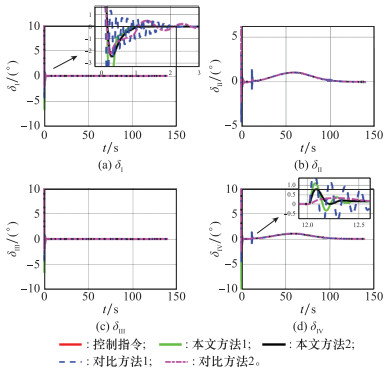
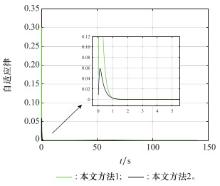
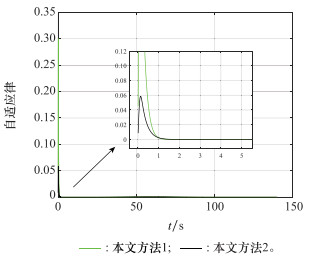
Fig.11
Variation curves of the adaptive laws"
| 1 | HUANG H Q, SUN G H, ZHANG D, et al. Adaptive attitude control for a kind of heavy-lift launch vehicle based on super-twisting algorithm[C]//Proc. of the IEEE China Automation Congress, 2021: 3288-3293. |
| 2 | ZHANG L, WEI C Z, JING L, et al. Heavy lift launch vehicle technology of adaptive augmented fault tolerant control[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 1587-1593. |
| 3 |
ZHANG L , JU X Z , CUI N G . Ascent control of heavy-lift launch vehicle with guaranteed predefined performance[J]. Aerospace Science and Technology, 2021, 110, 106511.
doi: 10.1016/j.ast.2021.106511 |
| 4 |
NAIR A P , SELVAGANESAN N , LALITHAMBIKA V R . Lyapunov based PD/PID in model reference adaptive control for satellite launch vehicle systems[J]. Aerospace Science and Technology, 2016, 51, 70- 77.
doi: 10.1016/j.ast.2016.01.017 |
| 5 |
ARAQUE J P B , ZAVOLI A , TROTTA D , et al. Genetic algorithm based parameter tuning for robust control of launch vehicle in atmospheric flight[J]. IEEE Access, 2021, 9, 108175- 108189.
doi: 10.1109/ACCESS.2021.3099006 |
| 6 |
HE H X , DUAN H B . A multi-strategy pigeon-inspired optimization approach to active disturbance rejection control parameters tuning for vertical take-off and landing fixed-wing UAV[J]. Chinese Journal of Aeronautics, 2022, 35 (1): 19- 30.
doi: 10.1016/j.cja.2021.05.010 |
| 7 | YE L Q , TIAN B L , LIU H D , et al. Anti-windup robust backstepping control for an underactuated reusable launch vehicle[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2020, 52 (3): 1492- 1502. |
| 8 | ZHAO L B, ZHU G S, ZHUANG L, et al. Backstepping control for reentry vehicle improved by bioinspired neuro-dynamic[C]//Proc. of the IEEE 6th International Conference on Automation, Control and Robotics Engineering, 2021: 205-209. |
| 9 |
YOU M , ZONG Q , TIAN B L , et al. Nonsingular terminal sliding mode control for reusable launch vehicle with atmospheric disturbances[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232 (11): 2019- 2033.
doi: 10.1177/0954410017708211 |
| 10 |
ZHANG C F , ZHANG G S , DONG Q . Fixed-time disturbance observer-based nearly optimal control for reusable launch vehicle with input constraints[J]. ISA Transactions, 2022, 122, 182- 197.
doi: 10.1016/j.isatra.2021.04.031 |
| 11 | 李晓栋, 廖宇新, 廖俊, 等. 可重复使用运载火箭一子级垂直回收有限时间滑模控制[J]. 中南大学学报(自然科学版), 2020, 51 (4): 979- 988. |
| LI X D , LIAO Y X , LIAO J , et al. Finite-time sliding mode control for vertical recovery of the first-stage of reusable rocket[J]. Journal of Central South University (Science and Technology), 2020, 51 (4): 979- 988. | |
| 12 | 吴燕生. 火箭大偏航入轨双回路扰动观测补偿有限时间收敛滑模控制[J]. 宇航总体技术, 2019, 3 (4): 1- 8. |
| WU Y S . Double loop disturbance observer based finite time convergence sliding mode control for rocket orbital insertion with large yaw[J]. Astronautical Systems Engineering Technology, 2019, 3 (4): 1- 8. | |
| 13 | ZHANG L , WEI C Z , WU R , et al. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle[J]. Aerospace Science and Technology, 2018, 82, 70- 79. |
| 14 | ZENG T Y , REN X M , ZHANG Y . Fixed-time sliding mode control and high-gain nonlinearity compensation for dual-motor driving system[J]. IEEE Trans.on Industrial Informatics, 2019, 16 (6): 4090- 4098. |
| 15 |
WANG F , MIAO Y , LI C Y , et al. Attitude control of rigid spacecraft with predefined-time stability[J]. Journal of the Franklin Institute, 2020, 357 (7): 4212- 4221.
doi: 10.1016/j.jfranklin.2020.01.001 |
| 16 |
LIANG C D , GE M F , LIU Z W , et al. A novel sliding surface design for prede-fined-time stabilization of Euler-Lagrange systems[J]. Nonlinear Dynamics, 2021, 106 (1): 445- 458.
doi: 10.1007/s11071-021-06826-0 |
| 17 |
ZHANG L , JING L , YE L H , et al. Predefined-time control for a horizontal takeoff and horizontal landing reusable launch vehicle[J]. Aircraft Engineering and Aerospace Technology, 2021, 93 (6): 957- 970.
doi: 10.1108/AEAT-11-2020-0253 |
| 18 | MEI H T, GUO Y H, YANG J Y, et al. Adaptive fault tole-rant attitude control for heavy-lift launch vehicles with input nonlinearities[C]//Proc. of the IEEE 40th Chinese Control Conference, 2021: 7633-7638. |
| 19 |
JIMENEZ E , MUNOZ A J , SANCHEZ J D , et al. A Lyapunov-like characterization of predefined-time stability[J]. IEEE Trans.on Automatic Control, 2020, 65 (11): 4922- 4927.
doi: 10.1109/TAC.2020.2967555 |
| 20 | ZOU A M , FAN Z . Fixed-time attitude tracking control for rigid spacecraft without angular velocity measurements[J]. IEEE Trans.on Industrial Electronics, 2019, 67 (8): 6795- 6805. |
| 21 | XIE S E , CHEN Q . Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts[J]. IEEE Trans.on Circuits and Systems Ⅱ: Express Briefs, 2021, 69 (1): 189- 193. |
| 22 | 姜博严. 二阶系统有限时间控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| JIANG B Y. Research on finite-time control problem for second order system[D]. Harbin: Harbin Institute of Techno-logy, 2018. | |
| 23 | CHEN Z , HUANG F H , CHEN W J , et al. RBFNN-based adaptive sliding mode control design for delayed nonlinear multilateral telerobotic system with cooperative manipulation[J]. IEEE Trans.on Industrial Informatics, 2019, 16 (2): 1236- 1247. |
| 24 |
GHELLAB M Z , ZEGHLACHE S , DJERIOUI A , et al. Experimental validation of adaptive RBFNN global fast dynamic terminal sliding mode control for twin rotor MIMO system against wind effects[J]. Measurement, 2021, 168, 108472.
doi: 10.1016/j.measurement.2020.108472 |
| 25 |
ZHAO Z J , WANG X G , ZHANG C L , et al. Neural network based boundary control of a vibrating string system with input deadzone[J]. Neurocomputing, 2018, 275, 1021- 1027.
doi: 10.1016/j.neucom.2017.09.050 |
| 26 | HAN Z G , ZHANG K , YANG T S , et al. Spacecraft fault-tolerant control using adaptive non-singular fast terminal sliding mode[J]. IET Control Theory & Applications, 2016, 10 (16): 1991- 1999. |
| 27 | XIA Y Q, ZHANG J H, LU K F, et al. Finite-time attitude control for rigid spacecraft based on adaptive super-twisting algorithm[M]// Oliver Jackson, ed. Finite Time and Cooperative Control of Flight Vehicles. Singapore: Springer, 2019: 117-140. |
| 28 |
ZHOU N , XIA Y Q , LU K F , et al. Decentralised finite-time attitude synchronisation and tracking control for rigid spacecraft[J]. International Journal of Systems Science, 2015, 46 (14): 2493- 2509.
doi: 10.1080/00207721.2013.868949 |
| 29 |
ZHOU N , XIA Y Q . Coordination control of multiple Euler-Lagrange systems for escorting mission[J]. International Journal of Robust and Nonlinear Control, 2015, 25 (18): 3596- 3616.
doi: 10.1002/rnc.3282 |
| 30 |
NAGESH I , EDWARDS C . A multivariable super-twisting sliding mode approach[J]. Automatica, 2014, 50 (3): 984- 988.
doi: 10.1016/j.automatica.2013.12.032 |
| 31 | 尤明. 可重复使用运载器固定时间姿态跟踪控制研究[D]. 天津: 天津大学, 2017. |
| YOU M. Research on fixed-time attitude tracking control for reusable launch vehicle[D]. Tianjin: Tianjin University, 2017. |
| [1] | Huiying WANG, Chunping WANG, Qiang FU, Zishuo HAN, Dongdong ZHANG. Infrared and low illumination image fusion based on image features [J]. Systems Engineering and Electronics, 2023, 45(8): 2395-2404. |
| [2] | Fan YANG, Ping MA, Wei LI, Ming YANG. Intelligent ranking evaluation method of simulation models based on siamese network [J]. Systems Engineering and Electronics, 2023, 45(7): 2060-2068. |
| [3] | Yu JIANG, Qi YUAN, Zhitao HU, Weiwei WU, Xin GU. Airport arrival and departure delay time prediction based on meteorological factors [J]. Systems Engineering and Electronics, 2023, 45(6): 1722-1731. |
| [4] | Zehong DONG, Yinghui LI, Maolong LYU, Zhe LI, Binbin PEI. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints [J]. Systems Engineering and Electronics, 2023, 45(5): 1476-1488. |
| [5] | Zihan SHEN, Xiubin ZHAO, Chuang ZHANG, Liang ZHANG, Xinxian LIU. Adaptive fault-tolerant method based on long-short term memory neural network [J]. Systems Engineering and Electronics, 2023, 45(3): 831-838. |
| [6] | Rui WANG, Tianqi ZHANG, Zeliang AN, Xueyi WANG, Zhu FANG. Modulation recognition algorithm for MIMO-OFDM system based on joint characteristic parameters and one-dimensional CNN [J]. Systems Engineering and Electronics, 2023, 45(3): 902-912. |
| [7] | Xiaojia YAN, Weige LIANG, Gang ZHANG, Bo SHE, Fuqing TIAN. Prediction method for mechanical equipment based on RCNN-ABiLSTM [J]. Systems Engineering and Electronics, 2023, 45(3): 931-940. |
| [8] | Shihui WU, Yu ZHOU, Zhengxin LI, Xiaodong LIU, Bo HE. Approach to simulation optimization of time-varying parameters system based on neural network [J]. Systems Engineering and Electronics, 2023, 45(2): 472-480. |
| [9] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [10] | Xiuxia YANG, Zijie JIANG, Yi ZHANG, Cong WANG. Three dimensional real-time rolling optimal guidance strategy for maneuvering targets [J]. Systems Engineering and Electronics, 2023, 45(2): 546-558. |
| [11] | Yuhang LUO, Yanxi CHEN, Kunyi GUO, Xinqing SHENG, Jing MA. Target parameter extraction based on neural network and scattering center model [J]. Systems Engineering and Electronics, 2023, 45(1): 9-14. |
| [12] | Shuang SONG, Yue ZHANG, Linna ZHANG, Yigang CEN, Yidong LI. Lightweight target detection algorithm based on deep learning [J]. Systems Engineering and Electronics, 2022, 44(9): 2716-2725. |
| [13] | Qian NIE, Lihua YANG, Bo HU, Lulu REN. Time-varying channel prediction method based on LSTM neural networks under basis expansion model [J]. Systems Engineering and Electronics, 2022, 44(9): 2971-2977. |
| [14] | Jian WANG, Zihao HE, Jie LIU, Ke YANG. Image fusion algorithm based on gradient domain guided filtering and improved PCNN [J]. Systems Engineering and Electronics, 2022, 44(8): 2381-2392. |
| [15] | Caiyun WANG, Yida WU, Jianing WANG, Lu MA, Huanyue ZHAO. SAR image target recognition based on combinatorial optimization convolutional neural network [J]. Systems Engineering and Electronics, 2022, 44(8): 2483-2487. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||